基于RCMRFDE和ELM的滾動軸承故障檢測方法*
2023-02-13 06:04:42周經龍喬惠萍
機電工程 2023年1期
周經龍,喬惠萍
(1.北京大學 智能學院,北京 100091;2.重慶科創職業學院 人工智能學院,重慶 402160;3.山西工程科技職業大學 計算機工程學院,山西 晉中 030031)
0 引 言
滾動軸承易發生疲勞失效而導致結構故障。如何有效地檢測滾動軸承的故障是軸承健康監測領域研究的重點[1]。
當軸承發生故障時,其振動信號表現出非線性和非平穩的特征[2]。采用線性分析的方法對該類信號特性進行描述時,常常存在不足之處。采用非線性的方法中,常用的非線性方法如熵,由于它能夠快速地度量復雜序列的不規則度,在各領域得到了廣泛應用[3]。
例如,楊云等人[4]采用排列熵(permutation entropy,PE),提取出了振動信號(經變分模式分解處理后)的模態分量中的故障信息,使得滾動軸承故障診斷的準確率達到了93.75%,該診斷結果表明,PE能夠有效地量化軸承的故障特征。
然而,PE是基于數據振幅出現的順序來進行熵的估計,因此,它忽略了數據的振幅信息。
為了解決PE的缺陷問題,吳新忠等人[5]采用了加權排列熵(weighted permutation entropy,WPE)來代替排列熵,用以提取出滾動軸承的故障特征,并將其與能量熵和PE進行了分類結果對比,結果表明,WPE的性能優于能量熵和PE,基于WPE的故障診斷方法的識別準確率更高。葛紅平等人[6]提出了一種粒化幅值感知排列熵(amplitude aware permutation entropy,AAPE),將其用于滾動軸承的故障診斷,并將其所得結果與采用排列熵所得結果,在準確率和聚類效果方面進行了對比,結果表明,AAPE在準確率和特征聚類效果方面均優于PE。
在計算排序模式出現的概率時,WPE和AAPE通過引入振幅信息,以此來對PE進行改進。當數據振幅差異較小,而系統本身具有較大的復雜度時,采用WPE和AAPE的方法將不再有效[7]。
同樣,為避免PE的缺陷,ROSTAGHI M等人[8]開發了散布熵(dispersion entropy,DE);并利用多種信號對DE和PE的性能進行了比較,結果表明,在數據不規則度的量化方面,DE比PE更加準確。夏理健等人[9]提出了一種基于散布熵的滾動軸承故障診斷方法,研究結果證明,DE具有較好的性能。吳守軍等人[10]提出了一種基于變分模態分解的散布熵特征提取方法,結果證明,在特征提取效率和識別準確率方面,采用散布熵要優于采用樣本熵和排列熵方法。
然而,原始DE算法的特征提取性能依然存在優化改進的空間。因此,在DE的基礎上,出現了各種改進算法。例如,AZAMI H等人[11]提出了波動散布熵(fluctuation dispersion entropy,FDE), LI Yu-xing等人[12,13]提出了反向散布熵(reverse dispersion entropy,RDE)和兩者的組合方法,即反向波動散布熵(reverse fluctuation dispersion entropy,RFDE)。
與DE相比,RFDE考慮了數據中鄰近元素的區別,對數據的部分或整體趨勢去趨勢化后,再引入了距離信息,能夠準確地估計出信號的復雜度。
然而,RFDE只是從單一的尺度來描述信號的波動,對信號的分析仍然不夠全面。對于振動信號而言,故障信息分散在多個尺度上,僅靠單一尺度的故障特征無法挖掘信號中深層次的信息[14]。
為此,LI Yu-xing等人[15]在RFDE的基礎上,引入了精細復合粗粒化處理方式,實現了信號的多尺度分析,提出了精細復合多尺度反向波動散布熵(RCMRFDE)方法,并將其用于艦船輻射噪聲的分析。最后,通過與其他幾種多尺度方法進行對比,驗證了RCMRFDE在增強特征區分度和穩定性方面優于其他方法。
目前,基于滾動軸承的故障診斷方法大多是將正常軸承和故障軸承同時進行故障特征提取和模式識別。然而,由于特征提取中的波動和模式識別中的不確定性,可能會將正常軸承歸為故障軸承,從而給出錯誤的維修方案。為了避免該情況的出現,要禁止健康軸承進入到模式識別的步驟中。
為了有效地提升滾動軸承故障診斷的可靠性和準確性,鑒于RCMRFDE方法在描述非線性序列復雜度和特征提取方面的優勢,筆者將其引入到故障診斷領域,并用于提取滾動軸承的多尺度故障特征,提出一種結合RCMRFDE和極限學習機(ELM)的滾動軸承故障檢測方法。
筆者利用滾動軸承故障數據,將該故障檢測方法分別與基于多尺度散布熵(multiscale dispersion entropy,MDE)、多尺度波動散布熵(multiscale fluctuation dispersion entropy,MFDE)和多尺度反向波動散布熵(multiscale reverse fluctuation dispersion entropy,MRFDE)方法進行對比。
1 精細復合多尺度反向波動散布熵
1.1 反向波動散布熵
FDE考慮了信號的波動能夠有效的識別隨機性的序列,而RDE噪聲魯棒性強,RFDE結合了兩種方法的優勢。RFDE的原理為:
(1)
式中:μ—期望;σ—標準差。
(2)利用線性變換,將y映射至[1,2,…,c],即:
(2)
式中:round—四舍五入函數;c—類別。
隨后,x中的元素均被映射至[1,2,…,c]內。

(3)
式中:m—嵌入維數;λ—延遲。

(4)
(5)每個散布模式的概率為:
(5)

(6)結合距離信息,并基于原始信號與白噪聲的距離,RFDE計算為:
(6)
1.2 精細復合多尺度反向波動散布熵
對于時間序列X={x1,x2,…,xN},基于下列步驟來計算其MRFDE和RCMRFDE[16]。

(7)
式中:τ—尺度因子。
計算各粗粒度序列的RFDE,即得到時間序列X的MRFDE。
(2)MRFDE的粗粒化處理存在缺陷,會遺漏大量有效信息。例如,當尺度因子為2時,根據式(7)的粗粒化處理,會遺漏x2和x3之間的信息,無法最大化數據信息。因此,采用復合粗粒化處理代替傳統的粗粒化處理來實現RFDE的多尺度分析,稱為RCMFDE。
RCMRFDE的原理如下:
對于時間序列,第n個粗粒度時間序列由下式進行計算:
(8)

RCMRFDE計算如下:
(9)

復合粗粒化綜合考慮了序列中數據的內在關系,避免了傳統粗粒化的信息遺漏問題。
2種粗粒化方法在尺度因子為2時的多尺度過程,如圖1所示。
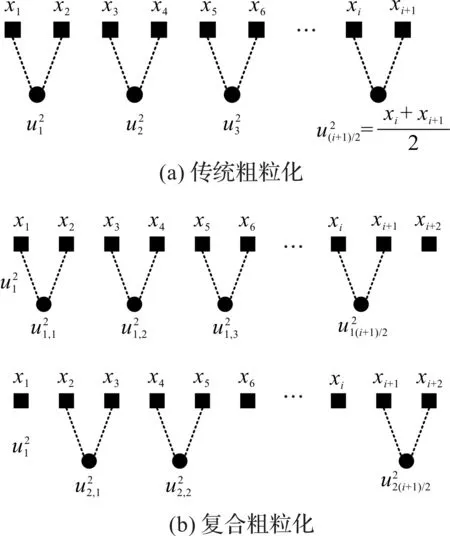
圖1 τ=2時2種粗粒化過程
從圖1可以發現:復合粗粒化處理對于時間序列的利用效率更高,數據之間的互相關性都得到了充分地考慮,優于傳統的粗粒化處理。
1.3 參數選擇
RCMRFDE需設置嵌入維數m、類別c、延遲d。對于m而言,太小,會無法檢測到數據的動態變化;過大,無法捕捉到數據的微小波動,遺漏關鍵信息。文獻[17]推薦m=2。
對于c而言,過小,造成可供分配的類別數目過少,使具有較大振幅差異的元素被歸為同一類別,丟失振幅信息;反之過大,會增加可分配的類別數,使本該處于相同類別(具有較小振幅差異)的元素被劃分為不同類別,影響算法抗噪性。基于以上原因,筆者設置c=5。
延遲對算法的性能基本沒有影響。尺度因子的選擇基于大多數文獻的建議,即τ=20。
2 仿真信號分析
為了驗證RCMRFDE的性能對數據長度不敏感,筆者生成了不同長度的WGN和1/f噪聲,依次為1 000,1 500,2 000,2 500,3 000,3 500,4 000。
計算2種隨機信號的MRFDE和RCMRFDE,結果如圖2所示。
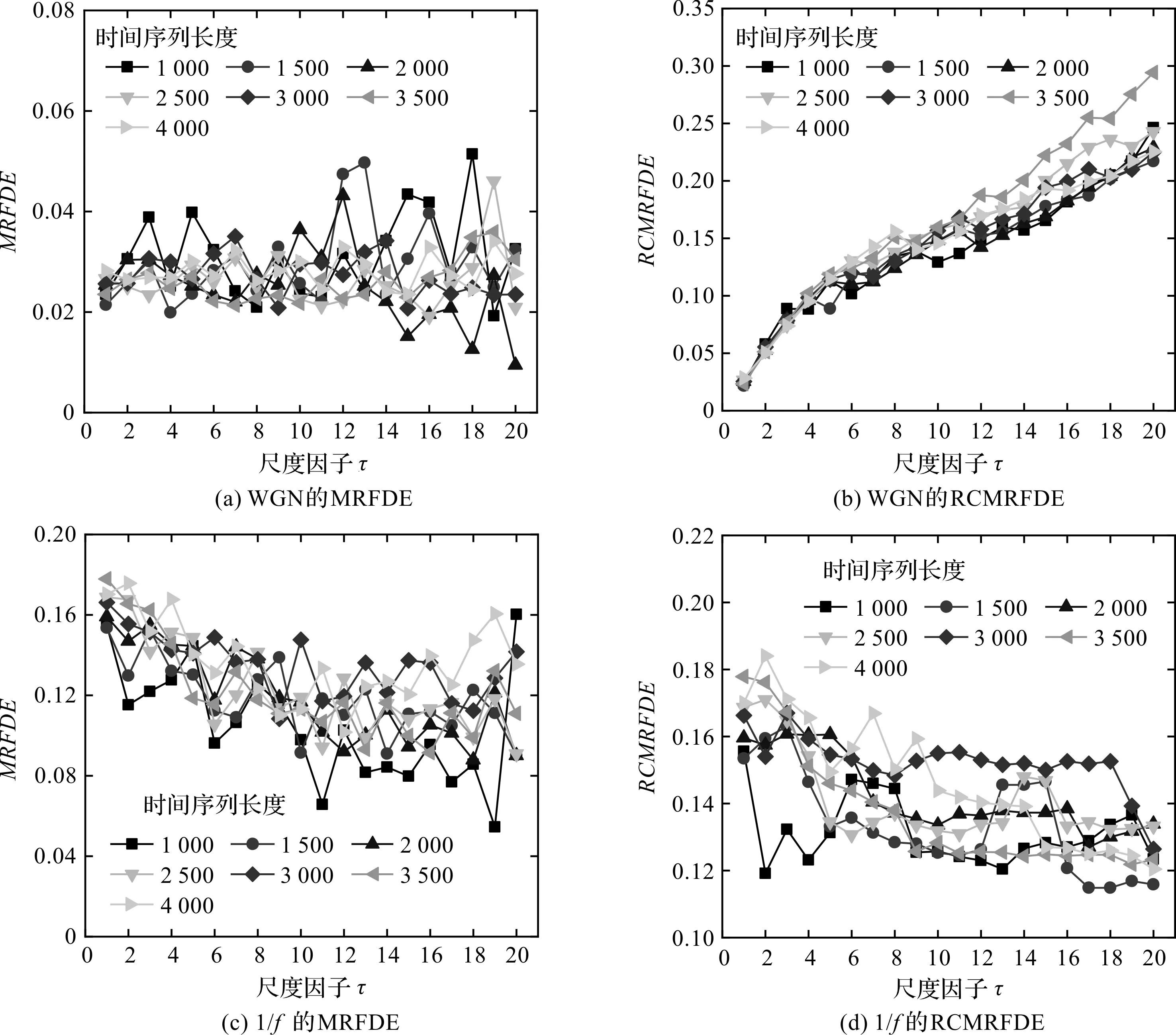
圖2 不同長度WGN和1/f噪聲的MRFDE和RCMRFDE
由圖2可以發現:隨著尺度的增加,2種噪聲的MRFDE曲線波動得更加劇烈,特別是長度為1 000時,MRFDE波動的幅度非常大;相反,RCMRFDE曲線表現出良好的平穩性,隨著尺度的增加,曲線的波動也明顯小于MRFDE;
此外,在處理長度為1 000的序列時,RCMRFDE仍然取得了非常穩定的結果,這表明,在分析短時間序列時,RCMRFDE更具有穩定性;

因此,在后續分析中,長度設置為2 000。
隨后,筆者進一步來驗證RCMRFDE相較于MRFDE的優勢。此處生成了40組長度分別為1 000,1 500,2 000的WGN和1/f噪聲。
筆者分別采用RCMRFDE和MRFDE分析以上3種長度信號,并計算其得到的標準差差值。
熵值標準差差值結果如圖3所示。
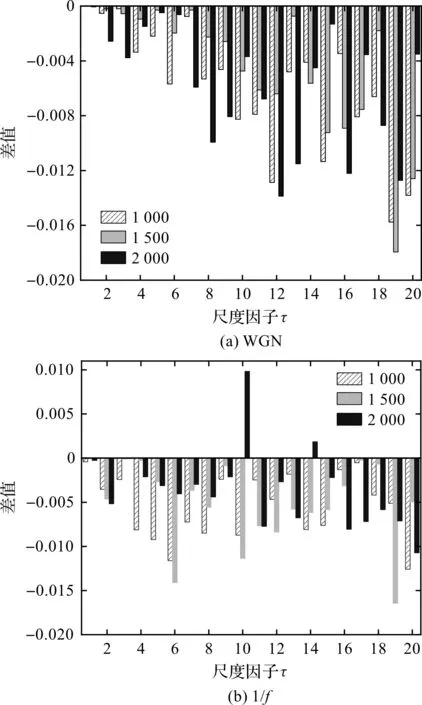
圖3 3種長度隨機信號的2種熵方法的標準差
從圖3可以發現:對于3種長度的隨機信號,在大多數尺度上,RCMRFDE的標準差均明顯小于MRFDE;特別是在尺度因子較大時,2種熵方法的標準差差值明顯較大,這證明了RCMRFDE方法適合用于分析短時間序列。
3 基于RCMRFDE和ELM的故障檢測方法
基于以上的分析,筆者提出了一種用于實現滾動軸承綜合故障檢測的分級方法。該方法第一步是利用RCMRFDE對滾動軸承的故障狀態進行預估,通過確定檢測閾值篩選出來健康軸承;隨后,利用RCMRFDE和ELM的混合模型來實現剩余滾動軸承的故障識別。
該綜合故障檢測方法的步驟如下:
(1)采集滾動軸承振動信號。設有h個工況。每個工況的數據分割成長度為2 000的互不重疊樣本,設每個工況有N個樣本,隨機選取M個樣本作為訓練樣本,剩余N-M個為測試樣本;
(2)在尺度因子為20時,計算全部健康樣本的RCMRFDE值,設[E1,…,Ei,…Em]為全部健康樣本的第20個尺度的熵值,則健康檢測時的閾值為:
(10)

RCMRFDE之所以能夠用于檢測滾動軸承是否存在故障,是因為健康軸承振動信號較復雜,而故障振動信號中存在周期性的脈沖,復雜度較低。因此,故障軸承信號和健康軸承信號的熵值存在差異,導致健康軸承的RCMRFDE值小于故障軸承,從而能夠完成樣本的檢測;
(3)經過健康檢測后,若證明樣本存在故障,則利用RCMRFDE方法提取20個尺度的熵值。在提取完全部故障樣本的特征后,可獲得故障特征庫;
(4)將訓練樣本的故障特征輸入至ELM分類器進行訓練,生成完備的分類器。隨后,將測試樣本輸入至分類器進行故障識別。
4 實驗驗證
4.1 實驗一
4.1.1 實驗及分析
為了驗證基于RCMRFDE和ELM的故障檢測的有效性,筆者利用美國凱斯西儲大學(Case Western Reserve University,CWRU)提供的滾動軸承公開故障數據集進行實驗。
CWRU滾動軸承實驗臺如圖4所示。

圖4 CWRU滾動軸承實驗平臺
該平臺包括一臺電機、扭矩傳感器、傳感器,和型號為SKF 6205的驅動端滾動軸承。軸承的轉速為R=1 797 r/min,傳感器的采樣頻率為f=12 000 Hz。
筆者利用電火花技術,人為在滾動軸承表面加工出3種故障,分別是內圈故障、滾動體故障和外圈故障。各故障狀態根據故障直徑的不同又分為0.177 8 mm、0.355 6 mm、0.533 4 mm的3種故障程度。
在實驗中,每種狀態都截取數據長度為2 000的60組樣本,其中,30組樣本作為訓練集,剩余30組作為測試集。
實驗數據的標簽信息詳細描述如表1所示。
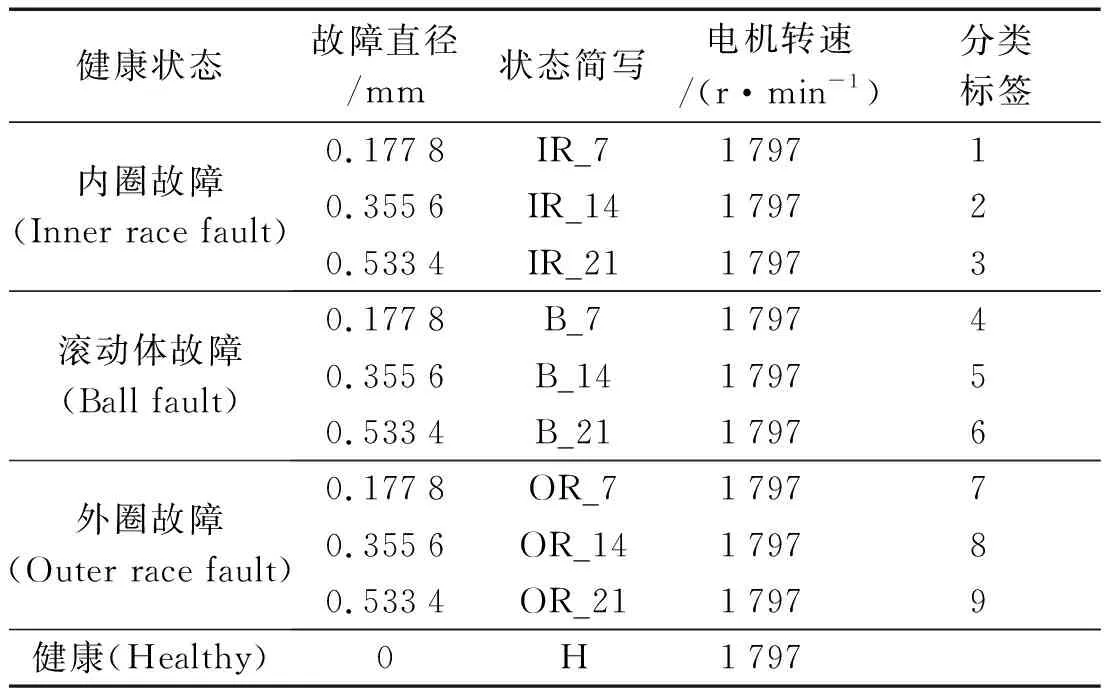
表1 實驗數據
滾動軸承振動信號的時域波形如圖5所示。
從圖5可以發現:波形雜亂無章,難以直接判斷樣本的故障類型。

圖5 滾動軸承振動信號時域波形
然后,在尺度因子為20時,筆者計算所有滾動軸承的RCMRFDE值。
所有樣本第20個尺度的熵值結果,如圖6所示。
由圖6可以發現:所有故障樣本的熵值均大于健康樣本,證明了利用基于RCMRFDE和ELM的故障檢測方法進行故障檢測的可行性。
為了更加直觀地確定健康篩選時的閾值,筆者利用式(10)設定了檢測閾值,為0.165 9。對比圖6可以發現:所有健康樣本的熵值均小于該閾值,所有故障樣本的熵值均大于該閾值。
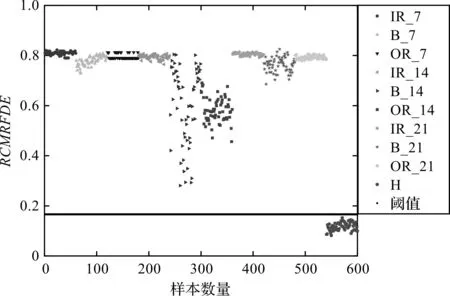
圖6 所有樣本在尺度τ=20時RCMRFDE分布
由此可見,在檢測未知軸承樣本時,將其熵值與閾值進行比較,能夠快速地判斷其健康狀態,避免在后續故障特征提取和故障分類過程中,由于模型自身的不確定性而出現錯誤的分類。因此,通過引入故障檢測這一步驟,能夠提升模型的可靠性和實用性,避免錯誤地判斷健康軸承的狀態。
在完成了健康檢測后可知,剩余的軸承樣本均存在故障,需要采取模型來識別其故障類型和嚴重程度。根據流程,筆者利用RCMRFDE提取全部軸承樣本的20個尺度的熵值。
4.1.2 對比分析
為了方便對比,筆者分別利用MRFDE、多尺度波動散布熵(MFDE)、多尺度散布熵(MDE)、多尺度模糊熵(MFE)、多尺度排列熵(MPE)進行特征提取。
MRFDE、MFDE和MDE的參數設置與上文一致。對于MFE,嵌入維數m=2,相似容限r=0.2,模糊參數n=2。對于MPE,嵌入維數m=6,時間延遲d=1。
不同熵值方法的特征提取結果如圖7所示。
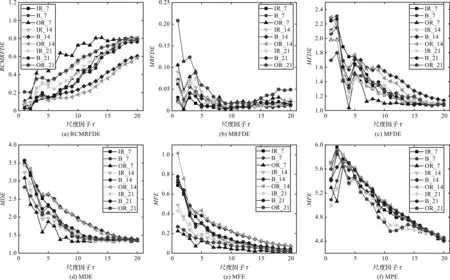
圖7 故障軸承的RCMRFDE、MRFDE、MFDE、MDE、MFE和MPE熵值曲線
從圖7可以發現:RCMRFDE提取的故障特征具有較好的區分度,在大多數尺度上都具備區分故障的能力,這證明了RCMRFDE能夠有效地區分不同故障樣本的復雜性;其他5種方法的熵值曲線在一定程度上也能夠區分不同故障狀態,但部分曲線出現了較為明顯的重合,降低了可區分度(例如,MRFDE曲線在尺度因子為5~15部分出現了顯著的重疊,此時無法可靠地區分不同故障類型的樣本)。
因此,通過對比可以證明,RCMRFDE具有較強的特征提取性能,其采用的復合粗粒化處理具有優于傳統粗粒化的性能。
在完成了故障樣本的特征提取后,筆者將樣本輸入至ELM分類器中,再進行樣本的訓練和識別。
采用基于RCMRFDE和ELM的故障檢測方法得到的分類結果,如圖8所示。
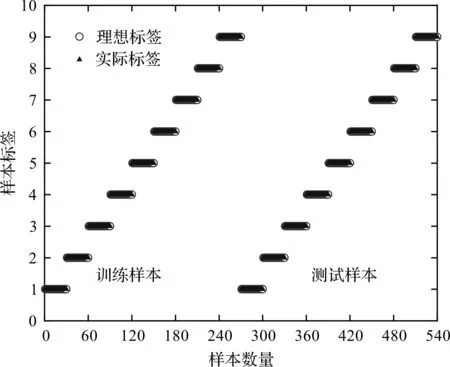
圖8 筆者所提方法的故障識別結果
從圖8可以發現:樣本的識別準確率達到了100%。可見,所有的故障樣本都實現了準確分類,這證明基于RCMRFDE和ELM的方法能夠有效地應用于滾動軸承不同故障類型和嚴重程度的識別。
隨后,筆者將采用另外5種對比方法提取到的故障特征輸入至ELM分類器,然后進行樣本的識別。
采用不同方法得到的故障識別結果如表2所示。
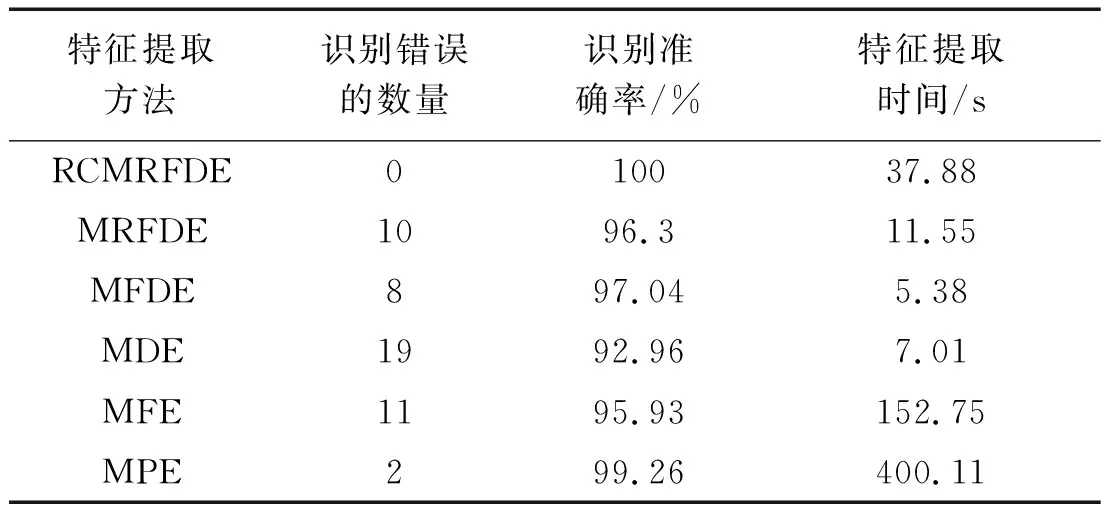
表2 不同方法的故障識別結果
此外,為了驗證RCMRFDE在特征提取中的效率,筆者對6種方法的特征提取時間分別進行了記錄(其中,電腦環境為MATLAB為2020 a,CPU為i5-10200 H,運行內存為8 GB)。
從表2中可以發現:另外5種方法的準確率均低于RCMRFDE方法,該結果驗證了其優越性;
其中,MPE的識別準確率達到了99.26%,僅出現2個錯誤分類的樣本,性能優于除RCMRFDE方法外的其他4種方法。然而,MPE的效率較低,其特征提取的時間需要400 s;
此外,MFDE的特征提取效率最高,僅需要5.38 s即可完成故障特征的提取。這是因為MFDE采用的粗粒化處理,不需要復雜的滑動和平均處理,因此具有較高的效率。
為了進一步驗證RCMRFDE在特征提取中的穩定性和優越性,筆者將分別采用6種方法做實驗,并重復30次,以有效地避免偶然因素和隨機性等未知因素對分類結果的干擾。
采用6種方法的30次分類結果曲線圖如圖9所示。
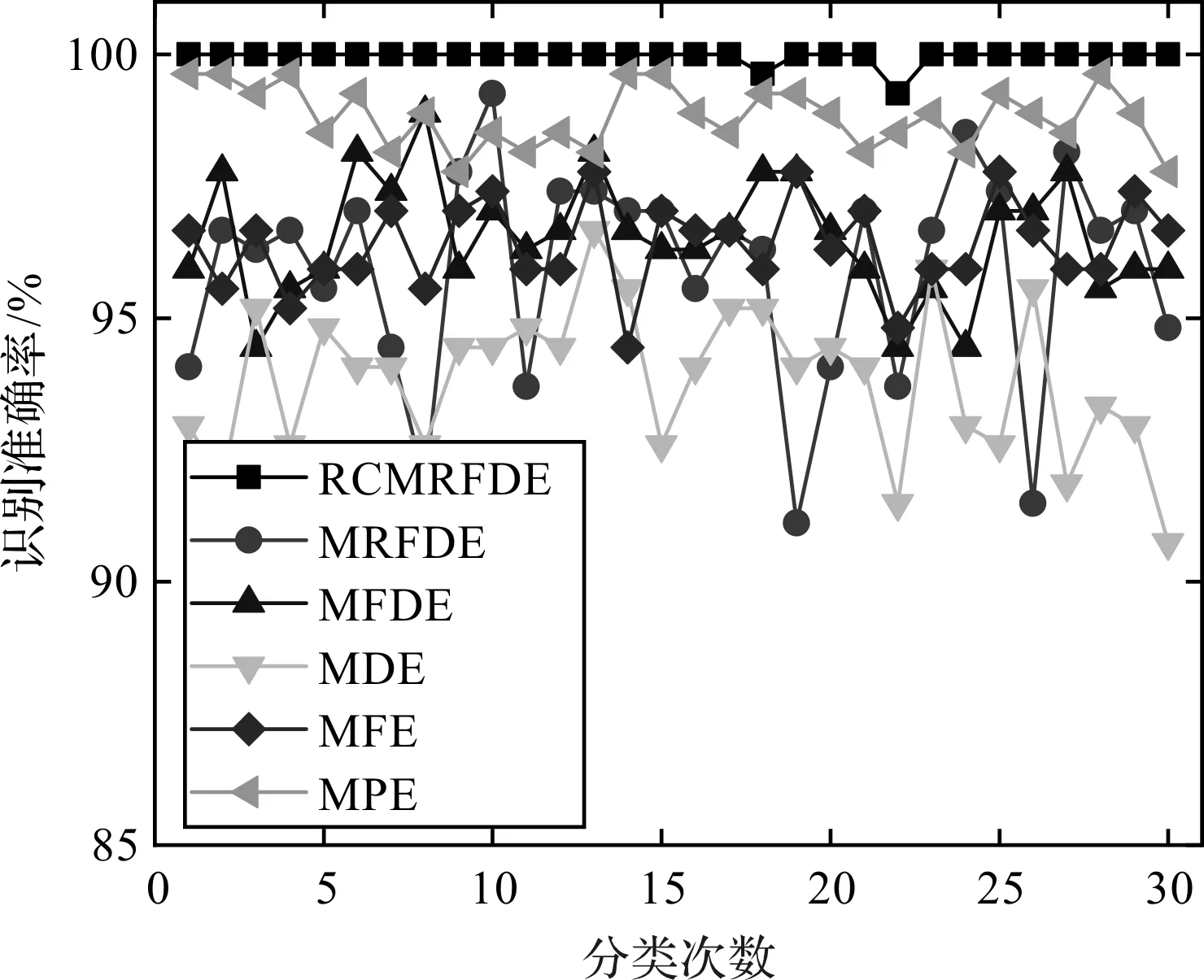
圖9 30次分類下6種方法的準確率曲線
采用6種方法的30次分類詳細結果如表3所示。
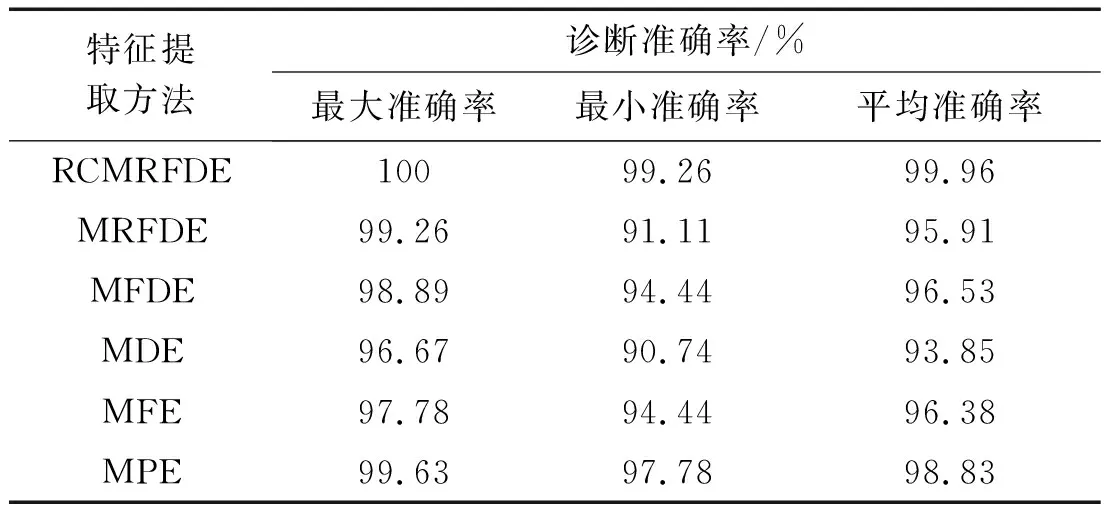
表3 6種方法的30次實驗的詳細結果
由圖9和表3可以發現:采用RCMRFDE方法得到的平均準確率最高,達到了99.96%,明顯高于另外采用其它5種方法所得結果,這證明了該方法在多次實驗下,仍然能夠取得相對可靠的故障識別結果;RCMRFDE的最低識別率為99.26%,即出現了2個樣本被錯誤分類,與圖8的結果并不完全一致(這表明單次實驗可能不準確,再次驗證了多次實驗的必要性);
除了MDE外,采用其他4種方法所得的平均準確率均達到了95%以上,也表明這4種方法均能夠相對可靠地識別滾動軸承的故障;
綜上所述,和其他5種特征提取方法相比,RCMRFDE提取的故障特征具有較高的質量,能獲得更加穩定的故障識別結果。
4.2 實驗二
4.2.1 實驗及分析
在實驗二中,筆者利用辛辛那提軸承振動數據來驗證RCMRFDE方法的通用性[19,20]。
辛辛那提軸承實驗平臺如圖10所示。
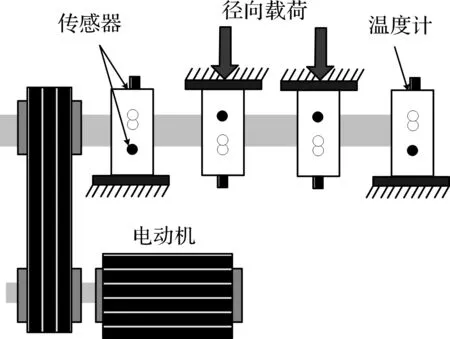
圖10 辛辛那提軸承實驗平臺
筆者將4個軸承布置在驅動軸上(傳動軸的轉速為2 000 r/min,采樣頻率為20 kHz),選取了正常、內圈故障、外圈故障和滾動體故障數據分別進行分析,每種數據的具體選擇方式參考文獻[21]中的方法。
在實驗中,針對每種狀態,筆者都截取數據長度為2 000的60組樣本,其中,30組樣本作為訓練集,剩余30組作為測試集。
實驗數據的詳細描述如表4所示。
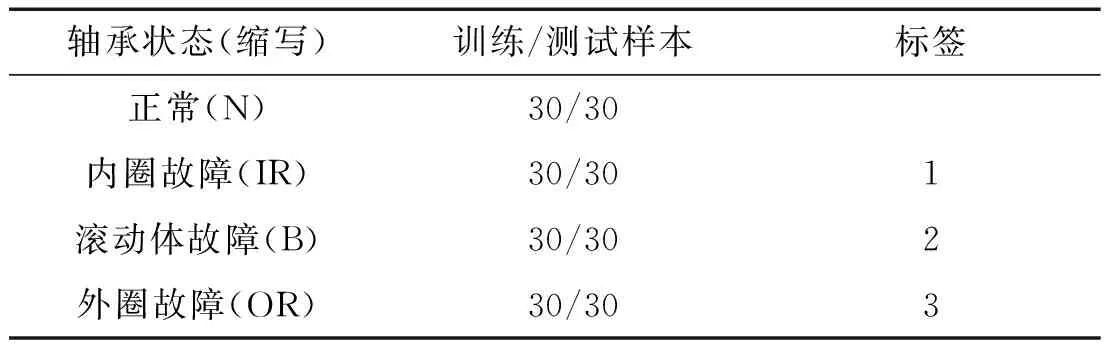
表4 實驗數據的標簽信息
滾動軸承振動信號的時域波形如圖11所示。
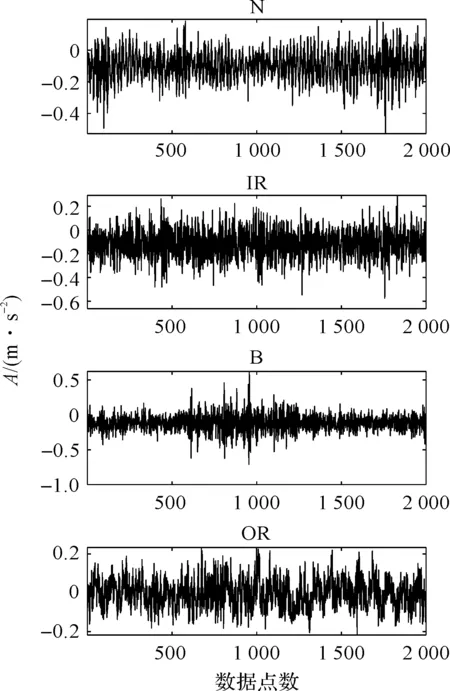
圖11 滾動軸承振動信號的時域波形
由圖11可以發現:雖然樣本B和其他3種信號波形不一致,具有區別于其他3種樣本的特點,但是仍然無法完全區分這4種樣本。
然后,筆者利用基于RCMRFDE+ELM的故障檢測方法來獲得該數據下,所有樣本的健康閾值。
所有樣本的第20個尺度的RCMRFDE熵值如圖12所示。
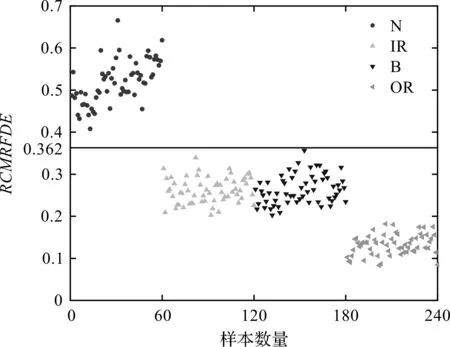
圖12 所有樣本在尺度τ=20時RCMRFDE分布
由圖12可以發現:所有故障樣本的熵值均大于健康樣本,證明了故障樣本的復雜性和健康樣本的復雜性之間存在較大的差異,也證明了利用筆者所提方法進行故障檢測的可行性。為了更加直觀地確定健康篩選時的閾值,設定了檢測閾值為0.362,對比圖12可以發現,所有健康樣本的熵值均小于該閾值。因此,通過引入故障檢測這一步驟,能夠極大地提升模型的可靠性和實用性,避免錯誤地判斷健康軸承的狀態。實驗2的故障檢測結果也驗證了筆者所提模型能夠適用于其他軸承數據。
4.2.2 對比分析
隨后,筆者利用RCMRFDE、MRFDE、MFDE、MDE、MFE和MPE進行對比,將6種方法提取的故障特征輸入至ELM分類器進行識別。
采用不同方法所得的分類結果如表5所示。
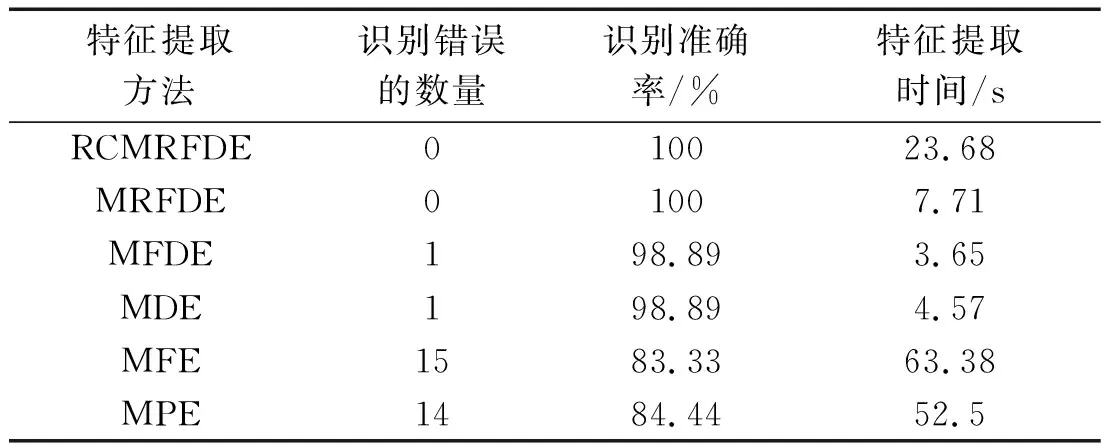
表5 采用不同方法所得的故障識別結果
從表5可以發現:RCMRFDE和MRFDE均取得了100%的識別準確率,證明這2種方法都可以有效地診斷軸承的故障;MFDE和MDE均出現了1個樣本被錯誤分類,識別準確率為98.89%,低于RCMRFDE方法;MFE和MPE分別出現了15個和14個樣本被錯誤分類,說明這2種方法不能完全準確地識別樣本的故障;
此外,還發現RCMRFDE提取故障特征需要23.68 s,用時比MRFDE和MFDE長,但比MFE和MPE約短1/2,證明了RCMRFDE方法的效率較高。
為了進一步驗證RCMRFDE在特征提取中的穩定性和優越性,筆者再次采用6種方法重復實驗30次。
采用6種方法所得的30次分類結果的曲線圖,如圖13所示。
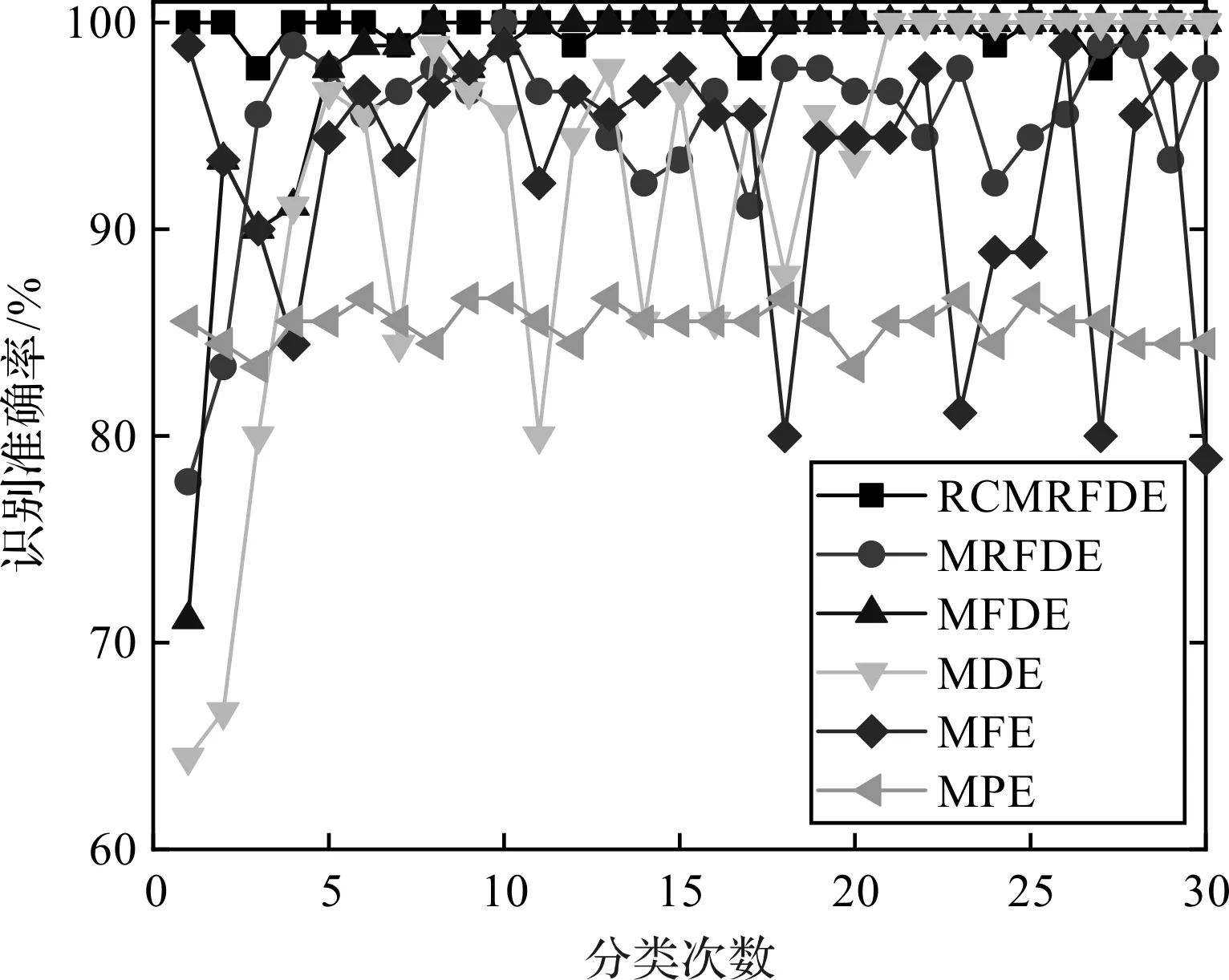
圖13 30次分類下6種方法的準確率曲線
采用6種方法所得的30次分類的詳細結果,如表6所示。
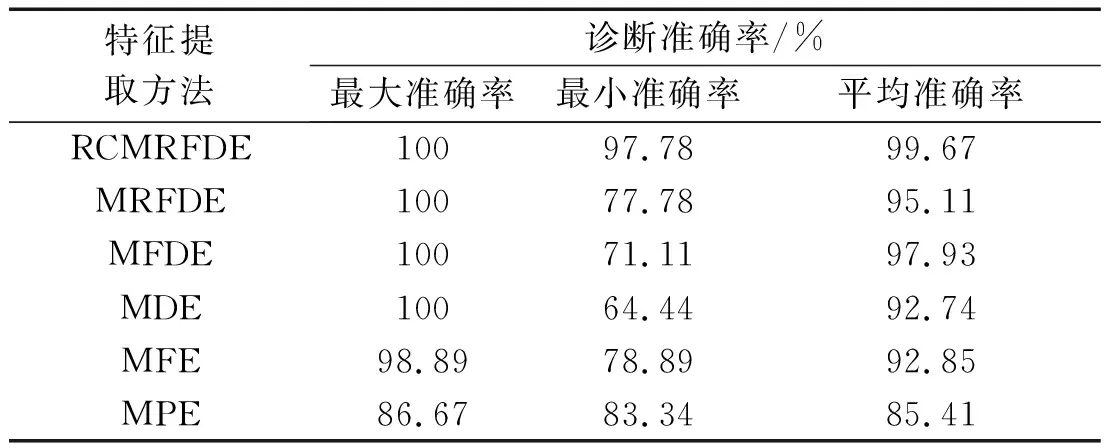
表6 采用6種方法所得的30次實驗的詳細結果
從圖13和表6可以發現:采用RCMRFDE方法所得到的平均識別準確率達到了99.67%,高于其他5種方法,證明了RCMRFDE方法的優越性。
由此可見,即使開展多次實驗,采用RCMRFDE方法也能夠取得較為穩定的故障識別結果。
5 結束語
為了有效地提升滾動軸承故障診斷的可靠性和準確性,并針對軸承的故障診斷與健康檢測,筆者提出了一種基于精細復合多尺度反向波動散布熵(RCMRFDE)和極限學習機(ELM)的滾動軸承綜合故障檢測方法。
首先,利用RCMRFDE對軸承進行了健康檢測,將健康軸承篩選出去;隨后,利用RCMRFDE提取故障軸承的特征,反映不同故障的特性;最后,將故障特征輸入至ELM分類器進行分類;并采用2種軸承故障實驗數據,對該軸承綜合故障檢測方法進行了實驗驗證。研究結論如下:
(1)RCMFDE采用了復合粗粒化處理方式,有效克服了MRFDE在處理短時間序列中的不足,減小了分析的誤差。RCMRFDE方法能夠準確地檢測滾動軸承的健康狀態,檢測精度達到了100%;
(2)RCMRFDE能夠有效地提取出滾動軸承振動信號中的故障特征。ELM分類器的分類結果表明,RCMRFDE方法的單次分類準確率達到了100%,即使開展多次分類實驗,平均準確率也能達到99.96%和99.67%,優于其他5種對比方法;
(3)基于RCMRFDE方法,提出了滾動軸承綜合故障檢測方法,避免了盲目的特征提取與模式識別;可以將具備繼續服役能力的健康軸承篩選出來,減小了誤分類的可能性,增強了設備的工作可靠性。因此,該方法更適合于用于工程中的實際應用。
由于上述實驗中所采用的2種數據均為公開數據集,基于RCMRFDE和ELM的故障診斷方法能否有效應用于工業實際尚未得到檢驗。
因此,在未來的研究過程中,筆者將計劃搭建實驗平臺,以進一步檢驗上述算法的有效性和其通用性。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
汽車維修與保養(2019年7期)2020-01-06 03:30:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2019年15期)2019-08-27 01:12:00
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39