基于MRSVD-SVD與VPMCD的交叉滾子軸承故障診斷研究*
2023-02-13 06:04:56何冬康類志杰鄧其貴
機(jī)電工程 2023年1期
何冬康,甘 霖*,類志杰,鄧其貴,和 杰
(1.柳州職業(yè)技術(shù)學(xué)院 機(jī)電工程學(xué)院,廣西 柳州 545006;2.云南省特種設(shè)備安全檢測研究院,云南 昆明 650228;3.云南惠民勞務(wù)服務(wù)有限公司,云南 昆明 650228)
0 引 言
在工業(yè)生產(chǎn)領(lǐng)域中,工業(yè)機(jī)器人近年來被廣泛應(yīng)用于電子、化工等領(lǐng)域[1]。
作為工業(yè)機(jī)器人的關(guān)鍵部件之一,交叉滾子軸承主要用于工業(yè)機(jī)器人手臂、回轉(zhuǎn)關(guān)節(jié)、底盤等部位。它具有可承受軸向、徑向、傾覆等方向綜合載荷,高回轉(zhuǎn)定位精度等特點(diǎn)。其一旦發(fā)生故障,輕則導(dǎo)致機(jī)械臂位移偏差,造成產(chǎn)品不良率大幅增長;重則導(dǎo)致設(shè)備重心偏移,發(fā)生傾覆。
當(dāng)交叉滾子軸承發(fā)生故障時,其振動信號會表現(xiàn)出明顯的非線性、非平穩(wěn)性。對于非線性、非平穩(wěn)振動信號,需要采用合適的時頻分析方法提取其故障特征分量[2]。
常用的時頻分析方法有小波變換、經(jīng)驗(yàn)?zāi)B(tài)分解(empirical model decomposition, EMD)、奇異值分解(singular value decomposition, SVD)等。但是小波變換的小波基一旦選定就無法改變,因而其缺乏自適應(yīng)性[3]。
EMD方法雖然具有自適應(yīng)性,但是存在過包絡(luò)、欠包絡(luò)、端點(diǎn)效應(yīng)等問題[4]。SVD是一種非線性信號處理算法,具有良好的數(shù)值穩(wěn)健性,不會產(chǎn)生相位偏移等優(yōu)點(diǎn),在信號處理、數(shù)據(jù)挖掘及降噪濾波等領(lǐng)域得到了廣泛應(yīng)用,但仍存在奇異值分辨率不足的問題[5]。
目前,針對SVD的研究主要集中在有效奇異值識別方面,而忽視了奇異值分辨率的重要性。
王益艷[6]以仿真信號為實(shí)驗(yàn)對比信號,提出了一種以奇異值均值作為判別有效奇異值標(biāo)準(zhǔn)的方法,雖然該方法增強(qiáng)了信號的噪聲魯棒性,但是得到的重構(gòu)信號仍然存在降噪不充分的問題。李葵等人[7]以滾動軸承為研究對象,提出了一種采用奇異值貢獻(xiàn)率來確定奇異值個數(shù)的方法,并對其進(jìn)行了濾波降噪處理,該方法解決了選擇有效奇異值時自適應(yīng)性的難題;但得到的奇異值為6個、有效奇異值為4個,難以將信號中的振動模態(tài)全部表征出來,存在降噪不充分的問題。陶然等人[8]以電梯導(dǎo)靴為研究對象,在李葵等人研究的基礎(chǔ)上,根據(jù)奇異值貢獻(xiàn)率方法,采用SVD對其進(jìn)行了第一次降噪,然后利用局部均值分解進(jìn)行了第二次濾波處理,提高了故障特征提取效率;但奇異值為8個、有效奇異值為1個,致使得到的重構(gòu)信號存在部分有用成分被削弱的情況,即過降噪現(xiàn)象。張燕霞等人[9]以雙跨度轉(zhuǎn)子為研究對象,采用變分模態(tài)分解方法對原始信號進(jìn)行了處理,得到了一系列本征模式函數(shù)(intrinsic mode function,IMF)分量,再以IMF分量構(gòu)造了特征矩陣,確定了奇異值的個數(shù);該方法雖然提高了奇異值的穩(wěn)定性和降噪效率,但I(xiàn)MF分量個數(shù)的確定缺乏自適應(yīng)性。張安等人[10]以滾動軸承為研究對象,提出了將SVD與共振解調(diào)相結(jié)合的降噪方法,先采用SVD將信號分解為4個奇異值分量,選擇峭度值最大的分量作為有效奇異值分量,然后對有效奇異值分量進(jìn)行了譜峭度分析,得到了帶通濾波器的中心頻率及帶寬,進(jìn)行了二次濾波處理,最終得到了目標(biāo)信號;共振解調(diào)結(jié)果分析表明,該方法雖然取得了較好的降噪效果,但是只用4個奇異值表征原始信號的振動模態(tài),存在奇異值分辨率不足的問題,選取1個奇異值作為有效奇異值,也會造成過降噪的現(xiàn)象。
綜上所述,結(jié)合SVD的理論可以發(fā)現(xiàn),奇異值是對信號中各個振動模態(tài)的表征。如果表征振動模態(tài)的奇異值太少,在選擇有效奇異值時就會存在以下兩個問題:
(1)如果選擇的有效奇異值過多,就會使重構(gòu)信號混入一部分的噪聲,從而降低信號的信噪比,無法起到降噪的目的;
(2)如果選擇的有效奇異值過少,雖然可以過濾噪聲提高信號的信噪比,但是會失去信號的有用成分,有時甚至?xí)斐芍貥?gòu)信號波形的畸變。
因此,采用SVD進(jìn)行降噪處理的前提是,有足夠多的奇異值對信號的各個振動模態(tài)進(jìn)行表征,即奇異值分辨率。
采用SVD提取工業(yè)機(jī)器人交叉滾子軸承振動信號微弱故障特征分量時,為了解決出現(xiàn)的奇異值分辨率不足的問題,筆者將數(shù)字圖像處理領(lǐng)域的圖像分辨率方法與SVD的消噪優(yōu)勢相結(jié)合,提出一種基于最大分辨率奇異值分解(MRSVD)-SVD與變量預(yù)測模型模式識別(VPMCD)的工業(yè)機(jī)器人交叉滾子軸承的故障診斷方法。
該方法首先根據(jù)最大圖像分辨率,將一維振動信號構(gòu)造成最大奇異值分辨率Hankel矩陣,進(jìn)行第一次SVD,得到奇異值序列;然后根據(jù)奇異值曲率譜原則,識別有效奇異值,按照非有效奇異值抑制的原則,選擇包含故障突變信息的有效奇異值,進(jìn)行SVD逆運(yùn)算,得到重構(gòu)振動信號;再以重構(gòu)振動信號構(gòu)建相空間矩陣,進(jìn)行第二次SVD,得到故障特征分量;最后計算故障特征分量的特征參數(shù),構(gòu)建特征向量,采用VPMCD進(jìn)行故障類型的識別。
1 基本理論
帶有6個關(guān)節(jié)的工業(yè)機(jī)器人與人類的手臂極為相似,具有相當(dāng)于肩膀、肘部和腕部的部位;因此,目前在工業(yè)領(lǐng)域中,以六軸機(jī)器人應(yīng)用最為廣泛。
六軸工業(yè)機(jī)器人的旋轉(zhuǎn)部件均采用交叉滾子軸承,其振動信號受減速器、驅(qū)動電機(jī)等的干擾;因此,其采集到的振動信號具有強(qiáng)背景噪聲的特點(diǎn),需要采用合適的消噪方法對振動信號進(jìn)行預(yù)處理,再進(jìn)行故障特征提取。
1.1 最大奇異值分辨率矩陣構(gòu)建
實(shí)驗(yàn)采集到的振動信號是行向量或列向量,而SVD方法處理的對象是二維矩陣[11]。因此,需要采用適當(dāng)?shù)姆椒▽⒁痪S振動信號構(gòu)造成合適階數(shù)的二維矩陣。
圖像分辨率是指單位圖像中像素點(diǎn)的數(shù)量[12]。分辨率越高,圖像越清晰細(xì)膩,越多的圖像細(xì)節(jié)能夠突顯出來。同理,奇異值分辨率是指表征信號單位長度振動模態(tài)的奇異值數(shù)量。奇異值分辨率越高則表征的振動模態(tài)越精確細(xì)膩,越多的細(xì)節(jié)分量能夠突顯出來。最大奇異值分辨率原則是指,對于確定采樣點(diǎn)的信號,使構(gòu)建矩陣的秩次最大,奇異值數(shù)量最多。
筆者以最大奇異值分辨率原則,將一維振動信號構(gòu)造成合適階數(shù)的二維Hankel矩陣,即奇異值的有效序次表示方法如下:
對于采集到的一維振動信號X=[x1,x2,…,xN]構(gòu)造成m×n維Hankel矩陣A:
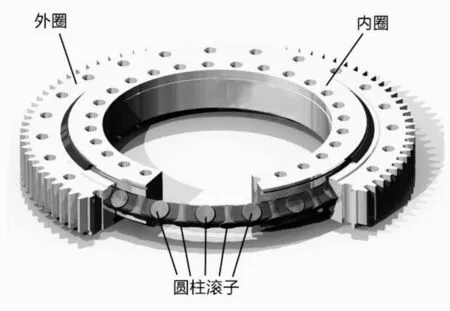
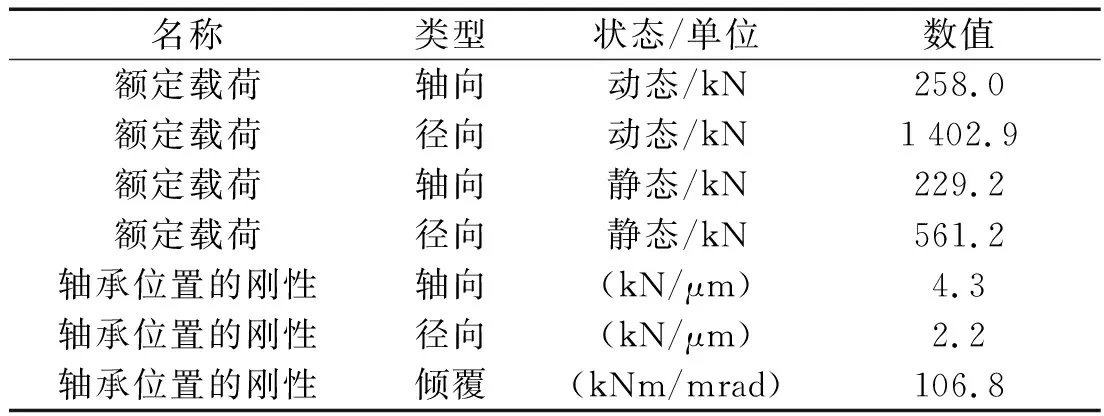
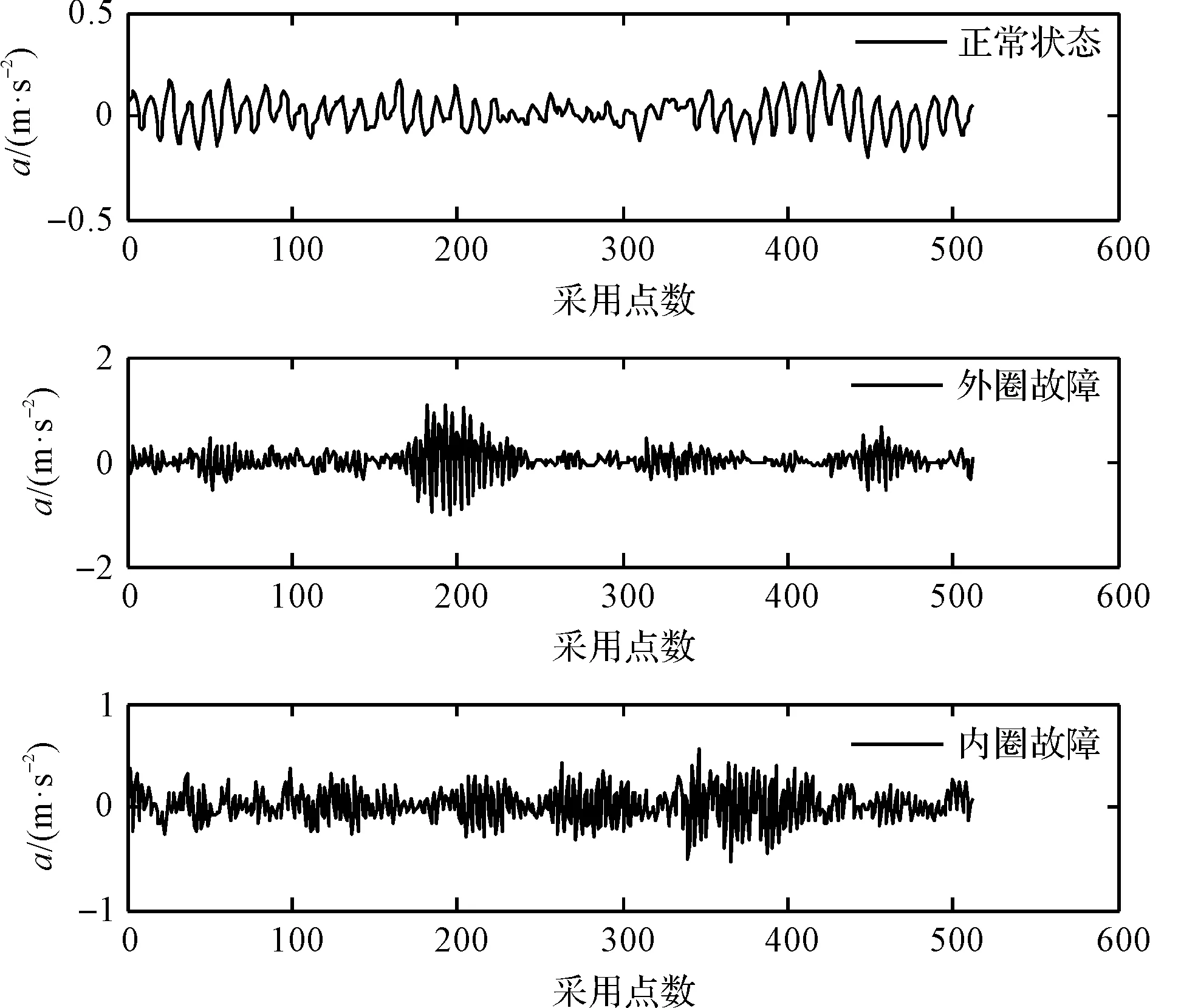
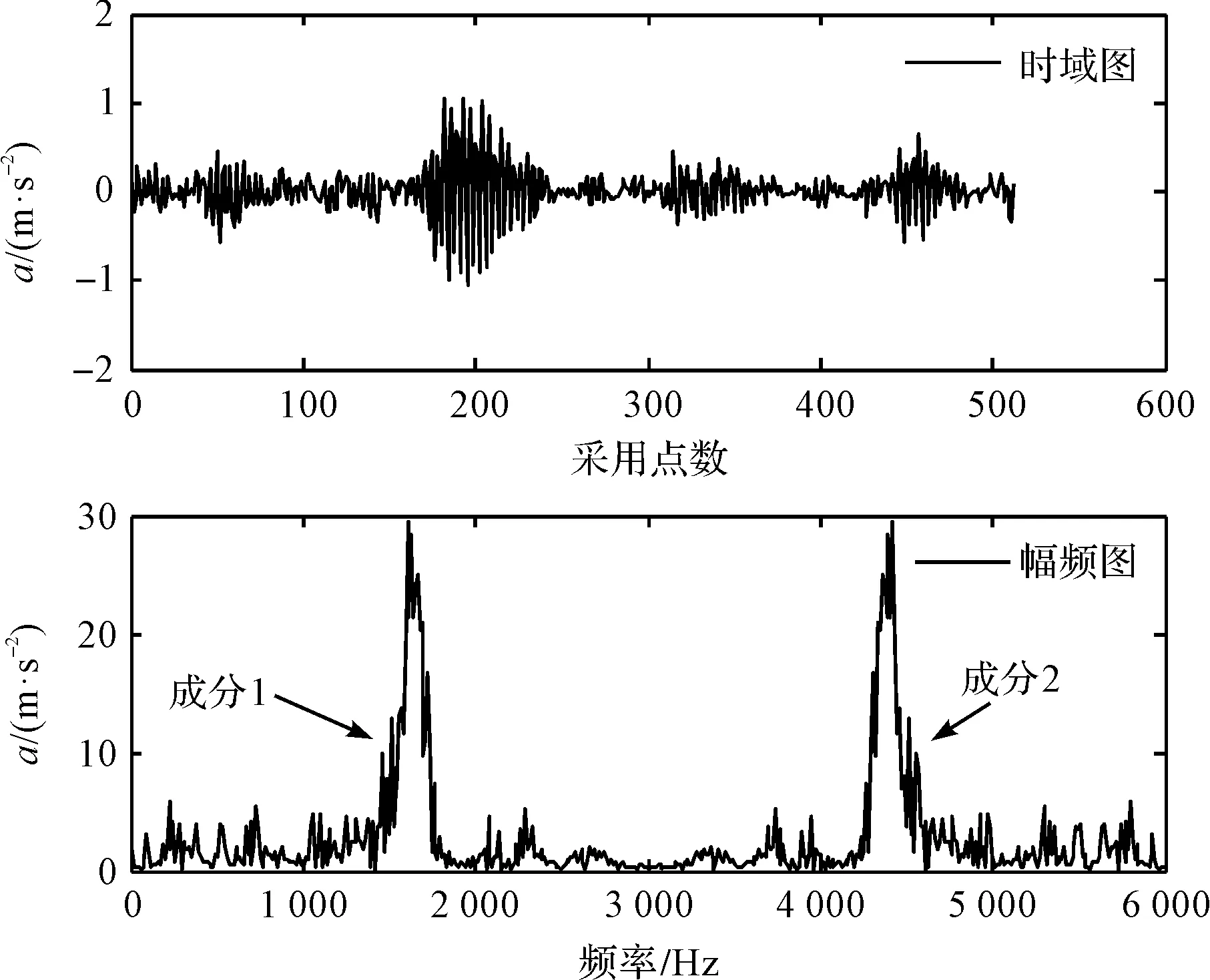
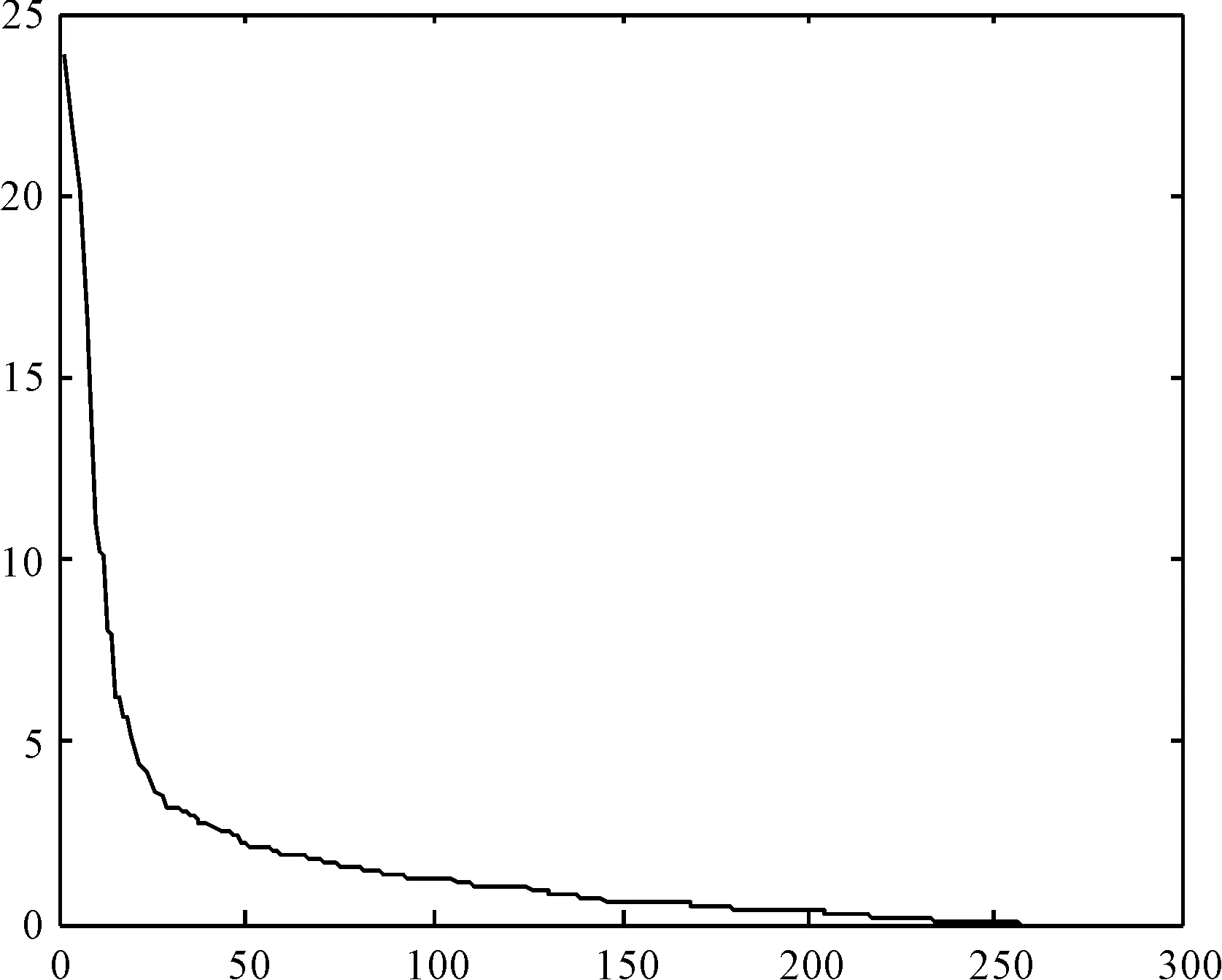
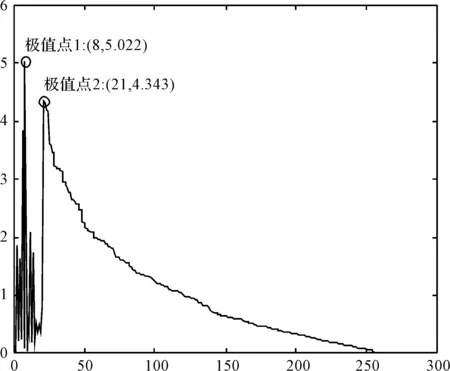
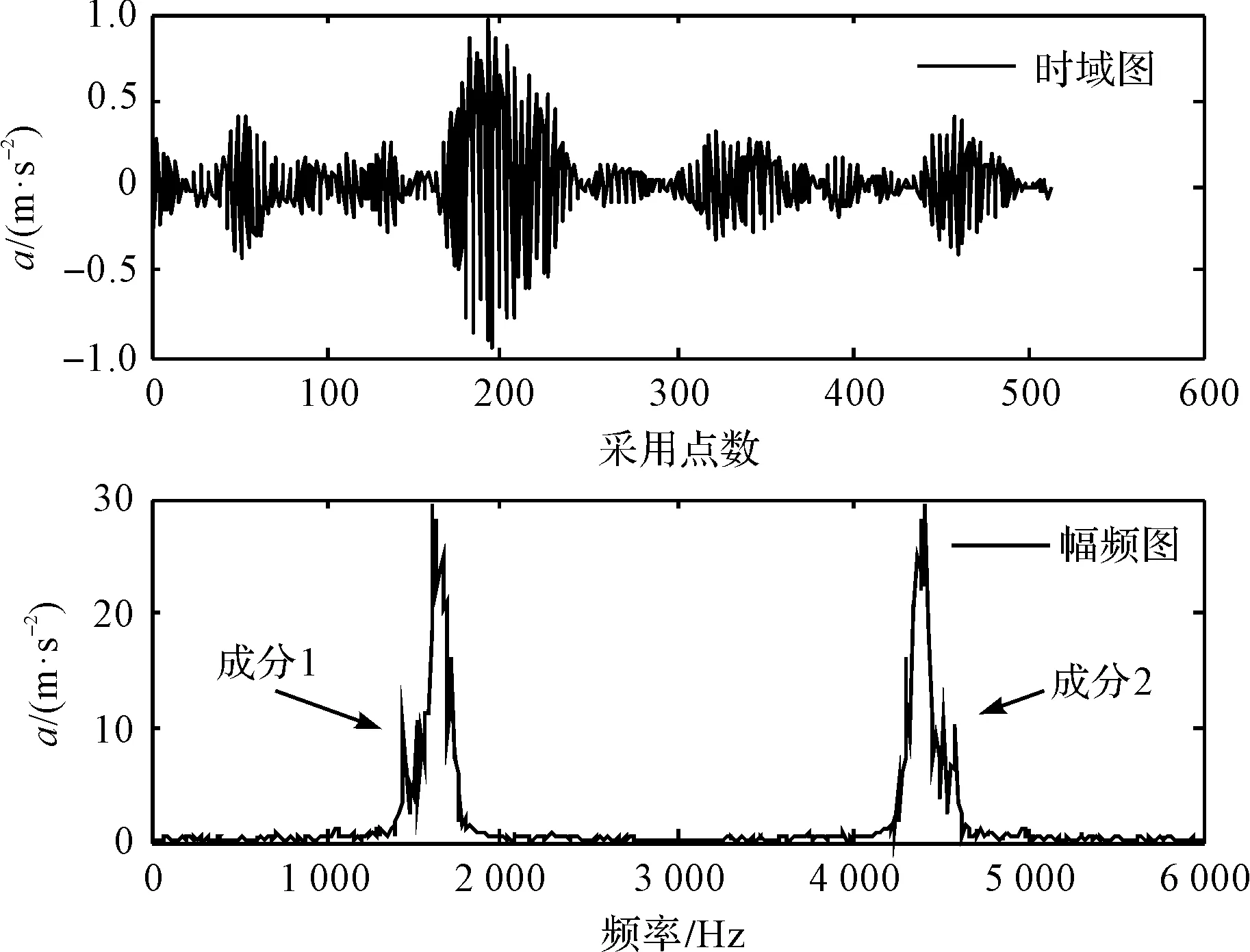
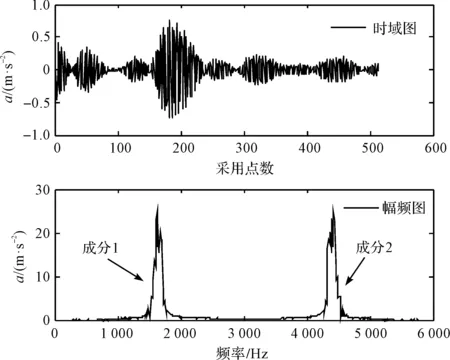
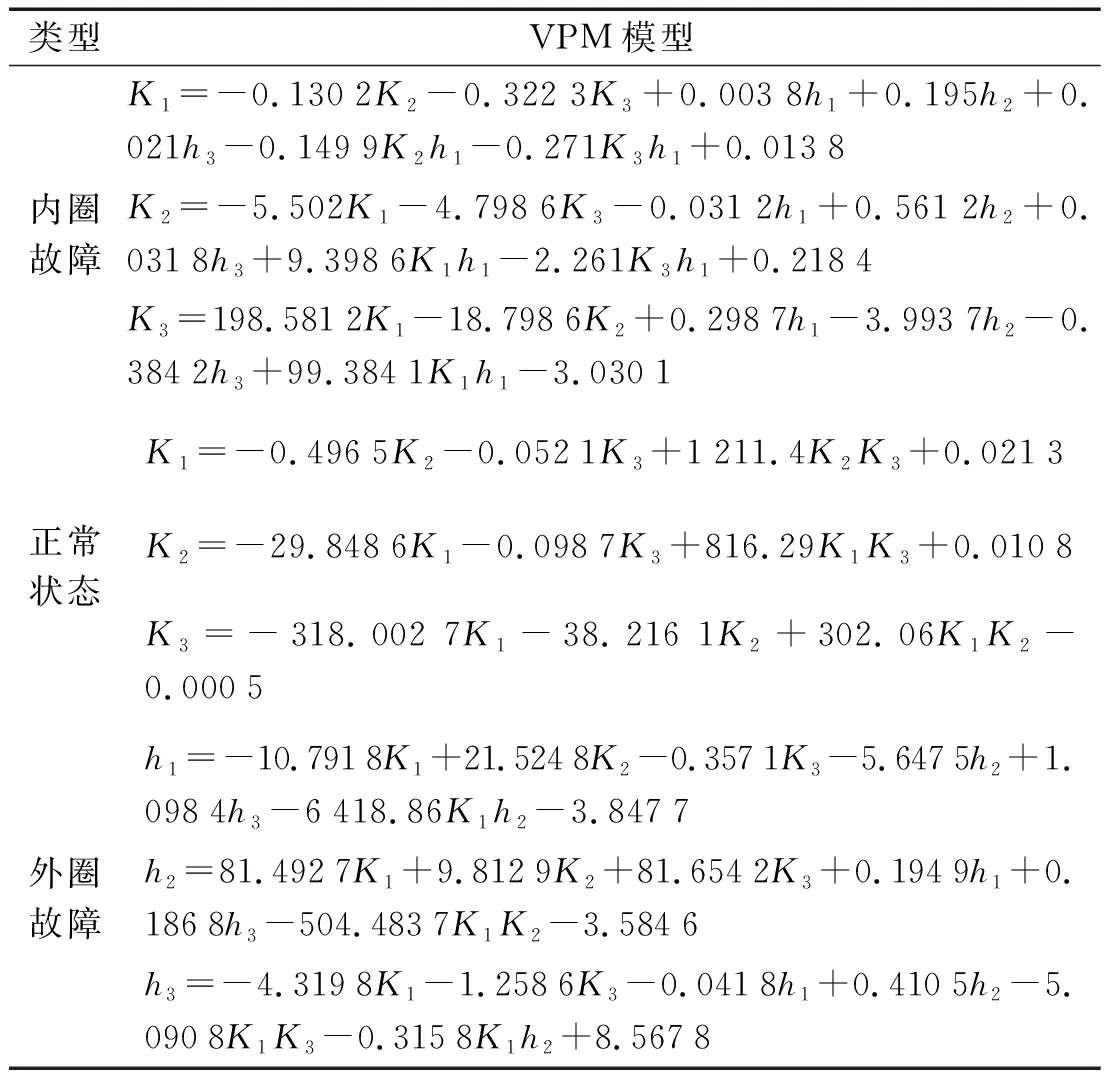
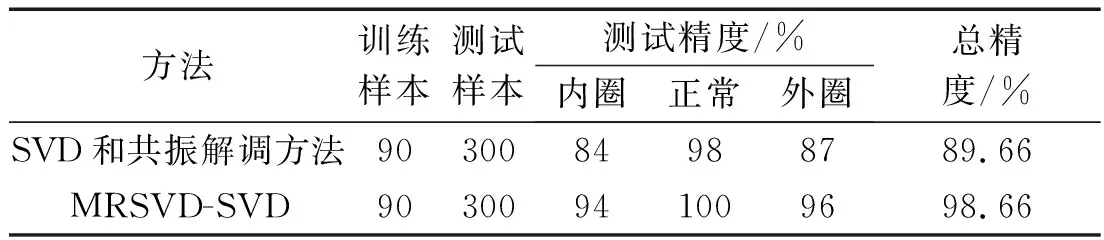
其中:1 為確保故障類型的有效識別,須采用合適的方法,將表征故障特征的分量從原始信號中分離出來。因此,筆者進(jìn)行第二次SVD時,采用連續(xù)截斷的方法將一維振動信號構(gòu)造成相空間矩陣。 該方法構(gòu)造的相空間矩陣,經(jīng)分解得到的故障特征分量彼此正交,具有良好的頻率分辨率,可以將原始信號中的故障特征信息表征出來。 對于采集到的一維振動信號X=[x1,x2,…,xN],構(gòu)造成m×n維相空間矩陣B: 其中:m≥2,n≥2且n=ceil(N/m)。 在信號處理領(lǐng)域,SVD是一種經(jīng)典的正交變換方法[13]。該方法對任意一個行或列線性相關(guān)的矩陣,通過對其左、右分別相乘一個正交矩陣進(jìn)行變換,將原矩陣轉(zhuǎn)化為一個奇異值矩陣(對角矩陣),且得到的奇異值個數(shù)反映原矩陣中獨(dú)立行(列)矢量的個數(shù),而其大小表征了信號的內(nèi)在屬性。因此,SVD常被用來降噪濾波,特征分離等。 根據(jù)SVD理論,對于一個矩陣A∈Rm×n,必存在正交矩陣U,V使下式成立: (1) 式中:S—對角陣,S=[diag(σ1,σ2,…,σq) 0]或者其轉(zhuǎn)置;σi—矩陣A的奇異值由大到小排列。 SVD具體內(nèi)容參見文獻(xiàn)[14]。 為了利用SVD對信號的分解,式(1)可改寫成如下形式: (2) 其中:ui∈Rm×1,vi∈Rn×1。 由SVD理論可知,ui之間、vi之間分別都是兩兩正交的。 A=A1+A2+…+AP (3) 其中:Ai∈Rm×n。 根據(jù)SVD的理論可知:奇異值越大,相應(yīng)分量包含的信息量越大,因此,Ai包含的信息量呈遞減形態(tài)。 奇異值能夠表征信號的內(nèi)在屬性,不同奇異值代表信號的不同振動特征,表征信號同種成分的奇異值具有一定類似特征。 為了將表征故障突變信號的奇異值序列識別出來,筆者采用奇異值曲率譜方法對奇異值的有效性進(jìn)行辨識[15]。 設(shè)奇異值由大到小排列,則各點(diǎn)奇異值的曲率為: (4) 曲率譜的最大峰值坐標(biāo)位置,即奇異值曲線上最大曲率Ck處的坐標(biāo)位置。k可以作為表征光滑信號的奇異值序列、表征故障突變信號的奇異值序列和表征噪聲等干擾信號的奇異值序列的分界點(diǎn)。如果奇異值曲線在k點(diǎn)是凸出的,則取奇異值為前k個;如果奇異值曲線在k點(diǎn)是凹進(jìn)的,則取奇異值為前k-1個。 根據(jù)曲率譜的特性及SVD的研究可以得到: (1)對于表征噪聲等干擾信號的奇異值序列,由于重構(gòu)軌跡矩陣是滿秩矩陣,且奇異值大小幾乎相等,因此,其曲率變化將表現(xiàn)出平滑衰減特性; (2)對于表征光滑信號的奇異值序列,由于重構(gòu)軌跡矩陣是奇異的,且奇異值大小變化幅度較大,因此,其曲率變化將表現(xiàn)出迅速衰減特性; (3)對于表征故障突變信號的奇異值序列,由于其重構(gòu)軌跡矩陣的秩比光滑信號高,比噪聲等干擾信號低,因此,其曲率變化將具有一個振蕩衰減過渡階段。 峭度系數(shù)是反映隨機(jī)變量分布特性的數(shù)值統(tǒng)計量。當(dāng)交叉滾子軸承正常運(yùn)行時,其振動信號是平穩(wěn)、無明顯周期性的信號,概率密度接近正態(tài)分布。當(dāng)交叉滾子軸承因部件表面出現(xiàn)損傷引起故障時,會產(chǎn)生脈沖故障分量,振動信號中大幅值的概率密度增加,幅值的概率密度會偏離正態(tài)分布,正態(tài)曲線出現(xiàn)偏斜或分散,峭度值也隨之增大。因此,峭度系數(shù)能夠反映出故障脈沖出現(xiàn)的概率,將脈沖響應(yīng)分量從原始信號中突顯出來[16]。 對于一組給定的離散振動信號數(shù)據(jù),其峭度系數(shù)為: (5) 由上式可知,峭度系數(shù)不僅反映了信號沖擊分量的強(qiáng)度,而且反映了沖擊幅度在時間軸上的分布,能夠表征信號的非線性、非平穩(wěn)性。 VPMCD是一種多變量預(yù)測模型的模式識別方法,該方法適用于將系統(tǒng)劃分為不同類別的特征參數(shù)之間具有某種一定的內(nèi)在關(guān)系,且該種內(nèi)在關(guān)系在不同類別之間具有明顯的差別。該方法通過VPM對特征參數(shù)進(jìn)行預(yù)測,實(shí)現(xiàn)模式識別,有效避免了神經(jīng)網(wǎng)絡(luò)難以確定迭代次數(shù)的問題和SVM尋找最優(yōu)解的問題,適合應(yīng)用于非線性、多分類的模式識別問題[17-21]。 VPM的4種基本模型如下所示: (1)線性模型。其表達(dá)式為: (6) 式中:r—模型階數(shù),r≤p-1,p—特征值Xi的個數(shù)。 (2)線性交互模型。其表達(dá)式為: (7) (3)二次模型。其表達(dá)式為: (8) (4)二次交互模型。其表達(dá)式為: (9) VPMCD方法主要由構(gòu)建VPM和模式識別組成,具體步驟如下: (1)VPM構(gòu)建 對于某一類故障類型的特征值Xi,首先需要確定模型的類型、階數(shù)及預(yù)測變量Xj(i≠j),然后利用訓(xùn)練樣本對預(yù)測模型進(jìn)行訓(xùn)練,可求得模型的所有參數(shù)。在實(shí)際求解模型參數(shù)的過程中,由于設(shè)計矩陣存在奇異性,筆者采用梯度下降法求取最優(yōu)解。 (2)模式識別 對于某一類故障類型的特征值Xi,其判別函數(shù)表示如下: Xi=f(Xj,b0,bj,bjj,bjk)+e (10) 式中:Xj—預(yù)測變量;Xi—被預(yù)測變量;e—變量預(yù)測誤差;b0,bj,bjj,bjk—模型參數(shù)。 式(10)稱為Xi的變量預(yù)測模型,記為VPMi。 基于上述基本理論,筆者提出了基于MRSVD-SVD與VPMCD的工業(yè)機(jī)器人交叉滾子軸承的故障診斷方法。 該方法的具體步驟如下: (1)根據(jù)最大奇異值分辨率原則,將一維原始振動信號x(t)構(gòu)造成m×n維Hankel矩陣A; (2)對Hankel矩陣A進(jìn)行第一次SVD,得到奇異值序列Sm;采用1.4節(jié)的奇異值曲率譜方法,將奇異值序列劃分為表征光滑信號的奇異值序列、表征故障突變信號的奇異值序列和表征噪聲等干擾信號的奇異值序列; (3)選擇表征故障突變信號的有效奇異值序列,根據(jù)圖像處理邊緣檢測Canny算法的非目標(biāo)值抑制原則重構(gòu)奇異值序列,采用SVD逆運(yùn)算方法進(jìn)行重構(gòu),得到包含故障突變信息的重構(gòu)信號; (4)故障特征分量提取,根據(jù)1.2節(jié)所述理論方法,將重構(gòu)信號構(gòu)造成相空間矩陣,進(jìn)行二次SVD,得到能夠表征原始信號振動特征的分量Ai; (5)構(gòu)建故障特征向量,根據(jù)1.5節(jié)所述特征參數(shù)計算方法,計算Ai的峭度系數(shù)及信號均值構(gòu)建故障特征向量T=[K1,K2,…,Kn,h1,h2,…,hn]; (6)訓(xùn)練變量預(yù)測模型,每種運(yùn)行狀態(tài)選取30組作為訓(xùn)練樣本,采用上述步驟1至步驟5的方法計算得到特征向量T;將訓(xùn)練樣本的特征向量T對各個VPM進(jìn)行訓(xùn)練,得到每種運(yùn)行狀態(tài)下的特征值預(yù)測模VPMi; (7)模式識別,每種運(yùn)行狀態(tài)選取100組作為測試樣本,采用上述步驟1至步驟5的方法計算得到特征向量T;根據(jù)1.6節(jié)所述理論,采用經(jīng)訓(xùn)練的預(yù)測模型VPMi對測試樣本的狀態(tài)進(jìn)行模式識別。 筆者所用實(shí)驗(yàn)裝置如圖1所示。 圖1 埃夫特六軸工業(yè)機(jī)器人 埃夫特六軸工業(yè)機(jī)器人,型號為ER10-1600,重復(fù)定位精度為±0.05 mm。 交叉滾子軸承如圖2所示。 圖2 交叉滾子軸承 交叉滾子軸承主要由內(nèi)圈、圓柱滾子和內(nèi)圈組成。交叉滾子軸承具體參數(shù)如表1所示。 表1 交叉滾子軸承參數(shù) 交叉滾子軸承型號為AXCR 360-U,信號采集來源于第一軸旋轉(zhuǎn)臂的交叉滾子軸承。傳感器安裝于第一軸旋轉(zhuǎn)臂的外側(cè),采樣頻率為12 kHz。故障類型分為內(nèi)圈故障、外圈故障,故障形式為使用磨砂在內(nèi)圈外側(cè)、外圈內(nèi)側(cè)制造0.1 mm磨損間隙。 采集交叉滾子軸承的3種狀態(tài)信號如圖3所示。 圖3 交叉滾子軸承振動信號 從圖3可以發(fā)現(xiàn):樣本點(diǎn)為512,與正常狀態(tài)相比,內(nèi)圈、外圈故障信號表現(xiàn)出了明顯的不定期的沖擊特性,而正常狀態(tài)信號表現(xiàn)得比較平穩(wěn)。因此,經(jīng)過分析可知,內(nèi)圈故障信號和外圈故障信號由于包含故障突變信息,表現(xiàn)出明顯的非線性、非平穩(wěn)性。 由于篇幅限制,筆者僅對一組外圈故障信號進(jìn)行具體分析。 為了驗(yàn)證該方法的有效性,筆者將其與SVD和共振解調(diào)方法進(jìn)行對比分析。 外圈故障原始信號包絡(luò)譜如圖4所示。 圖4 外圈故障原始信號包絡(luò)譜圖 從圖4可以發(fā)現(xiàn):外圈故障信號的時域圖表現(xiàn)出來明顯的沖擊特性,幅頻圖在1 000 Hz~2 000 Hz之間及4 000 Hz~5 000 Hz之間存在2個波峰,即外圈故障信號的主要頻率成分發(fā)生在2個波峰的頻帶,但是整個頻帶存在較嚴(yán)重的干擾信號。 筆者采用1.1節(jié)所述方法,將外圈故障信號構(gòu)造成m×n維Hankel矩陣,得到的Hankel矩陣階數(shù)為256×257。 筆者采用SVD對Hankel矩陣進(jìn)行分解,得到的奇異值序列,如圖5所示。 圖5 奇異值序列 由圖5可知:奇異值的大小呈現(xiàn)出由快速變小到緩慢變小的過程。 奇異值曲率譜如圖6所示。 圖6 奇異值曲率譜 由圖6可知:奇異值曲率譜有兩個明顯的極值點(diǎn):極值點(diǎn)1(橫坐標(biāo)軸為8),極值點(diǎn)2(橫坐標(biāo)軸為21)。 結(jié)合1.4節(jié)可知,奇異值被分為3部分:奇異值1至奇異值8為表征光滑信號的奇異值序列;奇異值9至奇異值21為表征故障突變信號的奇異值序列;奇異值22至奇異值256為表征噪聲等干擾信號的奇異值序列。 筆者選擇奇異值9至奇異值21序列作為有效奇異值,按照非目標(biāo)值抑制原則重構(gòu)奇異值序列,再進(jìn)行SVD逆運(yùn)算。 外圈故障重構(gòu)信號包絡(luò)譜如圖7所示。 圖7 重構(gòu)信號包絡(luò)譜圖 筆者將圖7與圖4進(jìn)行對比后發(fā)現(xiàn):在時域圖方面,重構(gòu)信號的最大振幅與原始信號幾乎相等,完整地保留了原始信號的沖擊特性;在幅頻圖方面,重構(gòu)信號兩個沖擊分量的最大幅值與原始信號幾乎相等,沖擊分量細(xì)節(jié)部分的成分1和成分2幾乎完整地保留了下來。 這表明筆者提出的MRSVD方法不僅達(dá)到了降噪的目的,而且完整地保留了原始信號的有用頻率成分。 與原始信號相比,重構(gòu)信號的振幅、成分1和成分2有輕微差別,其原因?yàn)?(1)噪聲隨機(jī)地分布在整個信號,降噪會對整個信號的振幅產(chǎn)生不同程度的影響;(2)噪聲的頻率具有不確定性,降噪會對信號整個頻帶的幅值產(chǎn)生不同程度的抑制;(3)由于噪聲在時域、頻域的隨機(jī)性,造成部分噪聲信號與有用成分難以切割,因此降噪過程只能是盡量抑制噪聲分量,保留有用成分。 筆者采用SVD和共振解調(diào)相結(jié)合的方法,對外圈故障信號進(jìn)行降噪處理。其具體的步驟為: 首先,將原始信號構(gòu)造成有效秩階數(shù)為4的Hankel矩陣,進(jìn)行SVD得到4個奇異值,對各個奇異值采用SVD逆運(yùn)算方法進(jìn)行重構(gòu),得到4個奇異值分量;然后,計算各個奇異值分量的峭度值,選擇峭度值最大的奇異值分量作為有效奇異值分量,對有效奇異值分量進(jìn)行譜峭度分析,確定帶通濾波器的中心頻率及帶寬,進(jìn)行二次濾波;最后,對二次濾波的信號進(jìn)行共振解調(diào)分析。 最后得到的包絡(luò)譜如圖8所示。 圖8 SVD和共振解調(diào)包絡(luò)譜 筆者將圖8與圖4進(jìn)行對比后發(fā)現(xiàn):在時域圖方面,圖8較好地保留了原始信號的沖擊特性,但最大振幅明顯小于原始信號圖4;在幅頻圖方面,圖8雖然抑制了原始信號中的干擾成分(除兩個沖擊分量外的其它頻率成分的幅值幾乎等于零),但是兩個沖擊分量的最大幅值明顯小于原始信號,沖擊分量細(xì)節(jié)部分的成分1和成分2被誤識別為噪聲信號從原始信號中剔除。 經(jīng)上述對比分析可知:在SVD和共振解調(diào)相結(jié)合的方法中,由于奇異值數(shù)量不夠,致使奇異值不能充分表征原始信號中的振動模態(tài),導(dǎo)致部分故障特征成分被誤識別為干擾信號。筆者提出的MRSVD方法通過構(gòu)建最大奇異值分辨率Hankel矩陣,經(jīng)SVD獲得了足夠數(shù)量的奇異值,使原始信號中的振動模態(tài)得到了充分表征,再采用奇異值曲率譜對奇異值的有效性進(jìn)行識別,使重構(gòu)信號不僅完整地保留了原始信號的有用頻率成分,而且很好地抑制了噪聲干擾信號。 筆者對訓(xùn)練樣本的重構(gòu)信號進(jìn)行故障特征分量提取(將重構(gòu)信號分解為3個表征故障信息的正交分量),計算故障特征分量的特征參數(shù),構(gòu)建故障特征向量,再對各個VPM進(jìn)行訓(xùn)練,得到每種運(yùn)行狀態(tài)下的特征值預(yù)測模型。 部分VPM模型如表2所示。 表2 訓(xùn)練得到的部分VPM模型 正常狀態(tài)信號的振幅及沖擊特性與故障信號有較大差別。結(jié)合實(shí)驗(yàn)仿真分析可知,正常狀態(tài)只需要采用峭度系數(shù)構(gòu)建特征向量就能達(dá)到識別效果,因此,筆者在正常狀態(tài)的VPM中只使用了峭度系數(shù),以減少計算量。 測試樣本的識別結(jié)果如表3所示。 表3 模式識別結(jié)果 從表3可知:MRSVD-SVD方法故障類型識別的總精度為98.66%,與SVD和共振解調(diào)方法相結(jié)合的方法相比,識別準(zhǔn)確率提高了9%。 該結(jié)果表明:基于MRSVD-SVD的方法通過構(gòu)建最大奇異值分辨率Hankel矩陣,有效提高了奇異值分辨率,降低了噪聲信號對故障沖擊成分的干擾,得到了高信噪比故障特征分量;然后計算特征參數(shù)構(gòu)建故障特征向量;最后通過VPMCD得到了較高的故障類型識別準(zhǔn)確率。 采用SVD提取工業(yè)機(jī)器人交叉滾子軸承振動信號微弱故障特征分量時,容易出現(xiàn)奇異值分辨率不足的問題,為此,筆者提出了一種基于MRSVD-SVD與VPMCD的工業(yè)機(jī)器人交叉滾子軸承故障診斷方法。 首先,筆者采用最大奇異值分辨率原則,將一維振動信號構(gòu)造成Hankel矩陣,通過兩次SVD得到了其故障特征分量;然后,計算了故障特征分量的特征參數(shù),構(gòu)建了其特征向量;最后,將其與SVD和共振解調(diào)相結(jié)合的方法進(jìn)行了對比。 具體的研究結(jié)論如下: (1)MRSVD根據(jù)最大奇異值分辨率原則構(gòu)建Hankel矩陣,使奇異值序列充分表征了原始振動信號包含的振動模態(tài),提高了奇異值分辨率及有效奇異值識別效率,改善了SVD的降噪效果; (2)對于表征不同振動模態(tài)的特征值,奇異值曲率譜是一種能夠有效識別有效奇異值的方法; (3)基于MRSVD-SVD與VPMCD的工業(yè)機(jī)器人交叉滾子軸承的故障診斷方法獲得了較高的故障類型識別效率,總精度為98.66%,比SVD和共振解調(diào)相結(jié)合的方法提高了9%,為工業(yè)機(jī)器人交叉滾子軸承的故障診斷提供了一條有效的途徑。 在實(shí)際應(yīng)用過程中,交叉滾子軸承的故障具有并發(fā)性和繼發(fā)性。因此,在下一步的工作中,筆者將針對不同故障特征相互混雜的復(fù)合故障,進(jìn)行相應(yīng)的診斷方法研究。1.2 相空間矩陣構(gòu)建
1.3 SVD的基本理論

1.4 奇異值曲率譜
1.5 峭度系數(shù)

1.6 VPMCD的基本理論

2 故障診斷方法
3 故障診斷實(shí)驗(yàn)

4 數(shù)據(jù)分析
5 故障模式識別
6 結(jié)束語
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50