基于液壓系統的風機葉片液壓自調角系統*
2023-02-13 05:58:22郭德鵬陳建平朱恩龍
機電工程 2023年1期
關鍵詞:系統
趙 倩,郭德鵬,陳建平,朱恩龍,郝 亮
(1.天津科技大學 機械工程學院,天津 300222;2.天津市輕工與食品工程機械裝備集成設計與在線監控重點實驗室,天津 300222)
0 引 言
為確保冷卻塔循環水系統安全可靠地運行,工程師對循環水系統進行設計時,將冷卻塔風機轉速以及葉片安裝角度均按照最大換熱量設定,并固定不變。但冷卻塔風機的換熱量受生產工藝、環境溫度等相關因素的影響,實際是時刻變化的。因此,冷卻塔風機冷卻能力與實際需求的不匹配,造成了大量能源浪費[1,2]。
通過對冷卻塔風機實施節能改造可以有效促進石油化工企業節電降碳,因此,很多專家學者從冷卻塔結構、控制原理和填料選擇等方面展開了研究[3]。
宋桂玲等人[4]研究分析了水輪機與風機的聯動關系,并對水輪機進行了合理選型;但部分參數無法滿足改造需求。米富來[5]對水輪機節能方案進行了探討,并計算了實際節能效益;但在改造過程中需要借助變頻調速系統提升驅動系統性能,進而保證配水系統的穩定運行,同時需要增加化冰管,防止冬季水面結冰。周強等人[6]對冷卻塔風機實施聯合變頻改造,取得了較好的節能效果;但該方案所需大功率的變頻設備,其價格十分昂貴,且在運行過程中會產生大量的諧波與熱量,降低了設備的使用壽命。沈鑫豪[7]對水冷卻和噴霧冷卻塔的工作原理進行了分析,并實施了改造,提升了冷卻能力和發電機組的工作效率。
國外學者ELSAID A M[8]研究了噴頭角度對冷卻效果的影響,提出了采用90°螺旋噴霧器的節能方案;但該方案需要增加噴霧裝置和塔體的高度,才能取得較好的冷卻效果,改造工程量相對較大。GHARA-GHEIZI F等人[9]研究了填料類型和布置方式對冷卻塔性能的影響,但未制定具體的實施方案。
因此,筆者提出一種基于液壓系統的冷卻塔風機葉片自調角的新型節能方法;首先,對自調角裝置進行原理分析和結構設計;然后,對液壓系統驅動力進行理論計算;最后,利用AMESim仿真軟件對多種液壓回路進行仿真分析,研究調速閥的內部元件節流口開度對液壓回路穩定性的影響。
1 風機葉片液壓自調角系統原理
區別其他冷卻塔風機的節能方式,考慮到改造工程量和冷卻塔風機性能調節經濟性、可靠性,以及實際工作環境對節能裝置的防水防腐要求,筆者提出了一種采用液壓系統驅動冷卻塔風機葉片改變安裝角度的節能方法。
其控制系統工作原理如圖1所示。
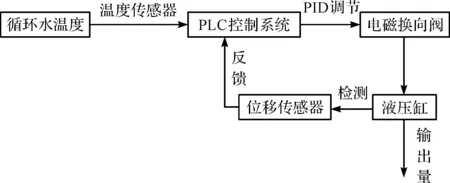
圖1 冷卻塔風機葉片液壓自調角控制系統原理圖
冷卻塔風機葉片液壓自調角裝置整體結構如圖2所示。
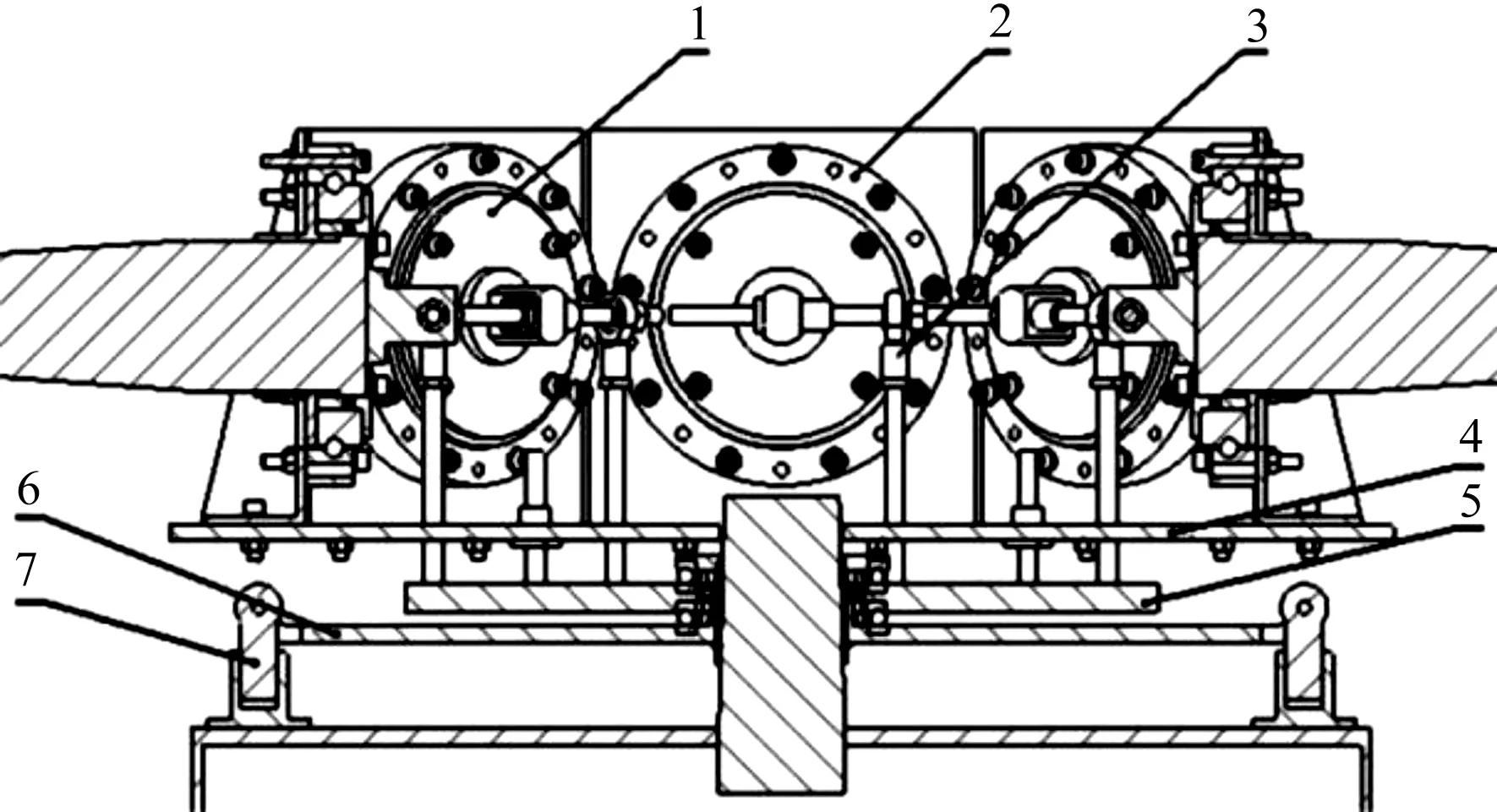
圖2 冷卻塔風機葉片液壓自調角裝置結構圖1—葉片端蓋;2—回轉支承;3—魚眼軸承;4—輪轂;5—升降板;6—同步板;7—液壓缸
自調角系統通過溫度傳感器采集循環水溫度,根據實際的換熱需求,在風機運行過程中由PLC控制系統控制液壓缸驅動曲柄搖桿機構,以此來調節風機葉片的安裝角度,進而改變風量,實現節能的技術目標。
位移傳感器安裝在活塞桿的末端進行檢測,然后反饋給PLC控制系統,采用PID調節電磁換向閥閥芯位移,改變液壓缸活塞桿的位移,提高系統的工作精度。
2 自調角結構原理
2.1 自調角變角機構
冷卻塔風機的變角機構主要包括升降機構和調角機構。
止推軸承升降機構如圖3所示。
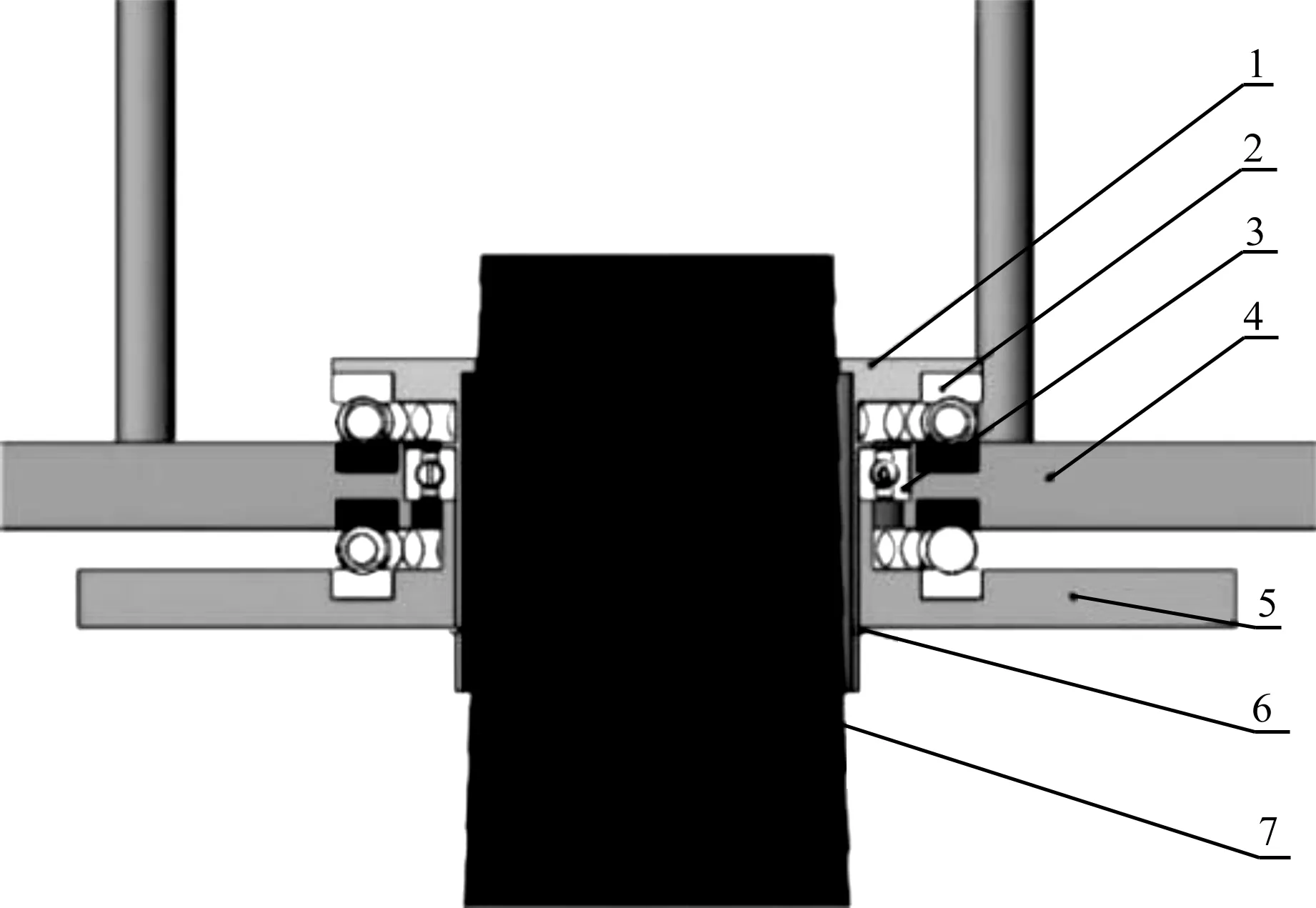
圖3 止推軸承升降機構1—軸承端蓋;2—止推軸承;3—深溝球軸承;4—升降板;5—同步板;6—軸用擋圈;7—傳動軸
魚眼軸承調角機構如圖4所示。
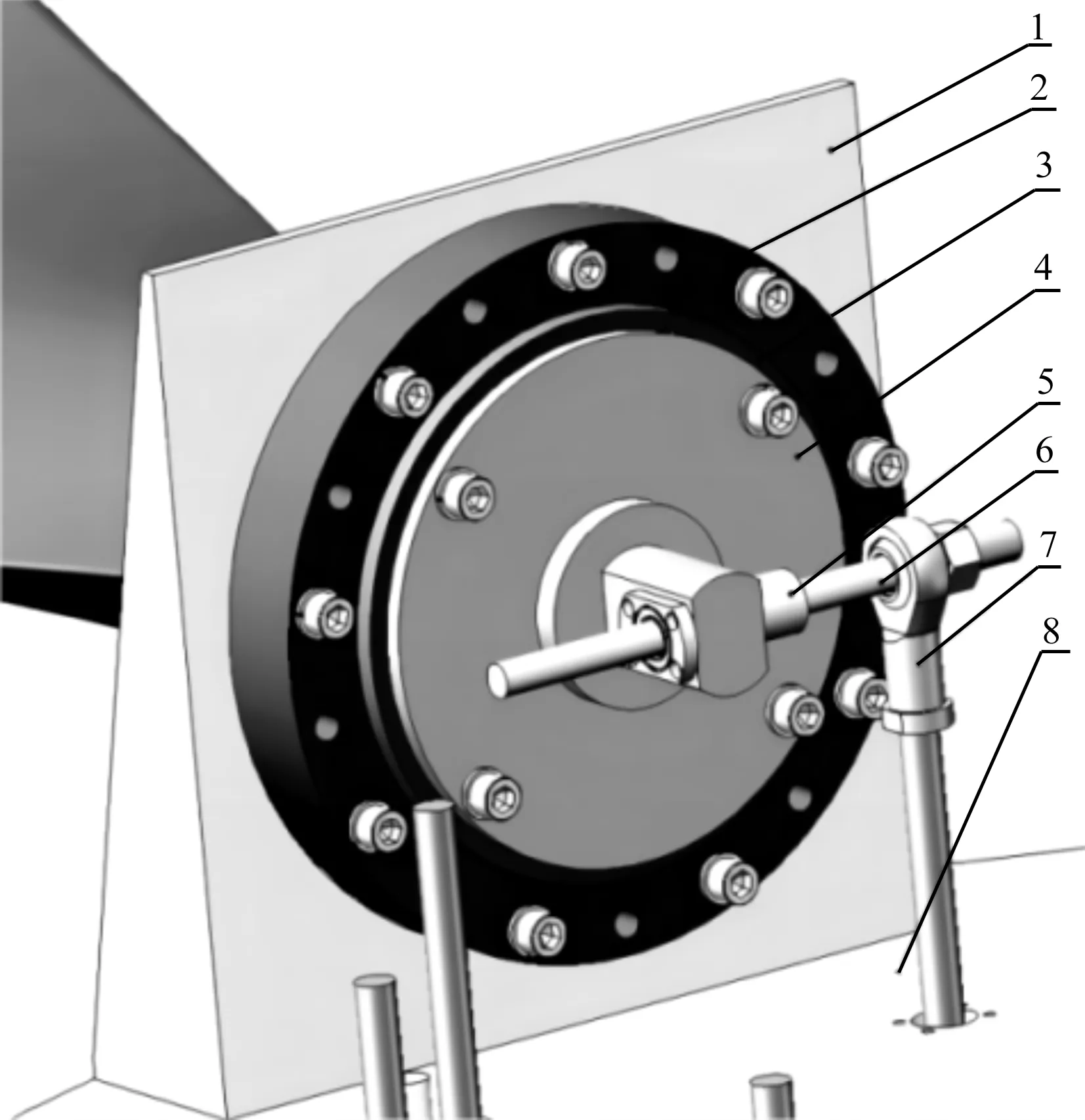
圖4 魚眼軸承調角機構1—輪轂豎板;2—回轉支承外圈;3—回轉支承內圈;4—葉片端蓋;5—直線軸承;6—扭轉桿;7—魚眼軸承;8—輪轂
當PLC控制系統接收到水溫信號時,液壓缸活塞桿作用于同步板,同步板帶動整個調角裝置沿軸向上下運動;兩個止推軸承分別安裝于升降板上下凹槽內,深溝球軸承安裝在升降板的內側,通過軸承端蓋和軸用擋圈將以上部件軸向固定。因此,升降板在止推軸承的作用下可以沿軸向直線運動,同時也可以和輪轂同步轉動;在與升降板固定連接的魚眼軸承的作用下,升降板的直線運動轉換成葉片端蓋的旋轉運動,回轉支承的外圈與輪轂豎板固定連接,葉片端蓋轉過一定角度時,帶動回轉支承的內圈轉過相同角度,進而帶動與回轉支承內圈固定連接的葉片轉過相同角度,最終實現葉片角度的調節。
2.2 自調角液壓驅動系統
冷卻塔風機葉片自調角液壓驅動系統主要由液壓泵、液壓缸、調速閥、電磁換向閥、溢流閥、單向閥等液壓元件組成。
其工作原理如圖5所示。
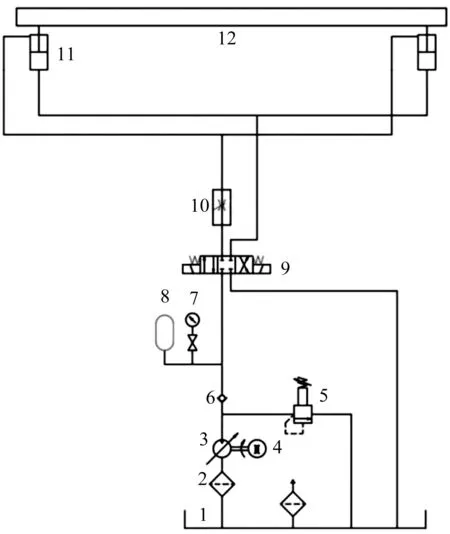
圖5 液壓驅動系統工作原理圖1—油箱;2—濾油器;3—液壓泵;4—電機;5—溢流閥;6—單向閥;7—壓力表;8—蓄能器;9—電磁換向閥;10—調速閥;11—液壓缸;12—同步板
系統中采用2個液壓缸對稱分布,并通過機械連接保證同步,提高葉片變角的精度。
當電磁換向閥的接收信號為負值時,線圈得電后控制閥芯右移,液壓油流入液壓缸的無桿腔,作用在活塞底部,推動活塞桿伸出,使同步板上升,葉片安裝角度變大;接收信號為0時,沒有電流通過,閥芯處于中位狀態,活塞桿保持不變,葉片安裝角度保持不變;接收信號為正值時,線圈得電后控制閥芯左移,液壓油流入液壓缸的有桿腔,作用在活塞頂部,推動活塞桿縮回,使同步板下降,葉片安裝角度變小。
3 風機氣動載荷分析
3.1 葉片氣動載荷分析
風電機組葉片設計時一般采用葉素理論。筆者借鑒風力機氣動載荷的計算方法,計算冷卻塔風機葉片在運行過程中受到的軸向推力[10-13]。
基于葉素理論的基本假設,可以將單個葉素視為二維翼型進行力學分析。
風輪葉片氣動載荷分析如圖6所示。
將單個葉素上的力沿展向進行積分,便得到葉片在運行過程中受到的軸向推力。當風機穩定運行時,均勻的入流風流經葉片截面,產生氣動載荷。
根據二維翼型空氣動力學的相關理論可知,當翼型不失速時,葉素所受氣動載荷如下:
(1)
(2)
葉素上的推力和轉矩如下:
(3)
(4)
式中:ρ—空氣密度,kg/m3;W—入流速度,m/s;C—翼型截面弦長,m;B—葉片個數;CL—升力系數;CD—阻力系數;φ—翼型入流角,(°);r—葉素半徑,m。
在已知的氣流速度和風輪轉速的基礎上,根據速度三角關系可得到入流速度:
(5)
(6)
(7)
α=φ-β
(8)
式中:V1—風速,m/s;a—軸向誘導因子;b—切向誘導因子;ω—輪轂角速度,m/s;α—攻角,rad;β—槳距角,rad。
誘導因子計算公式如下:
(9)
(10)
式中:σ—葉片實度。
葉片實度的表達式為:
(11)
3.2 葉片調角裝置的驅動力變化
葉片調角所需驅動力為調角裝置的自身重力和氣動載荷之和,風機在調角過程中所承受的氣動載荷受葉片安裝角度的影響,因此,調角所需驅動力隨葉片安裝角變化的曲線,如圖7所示。
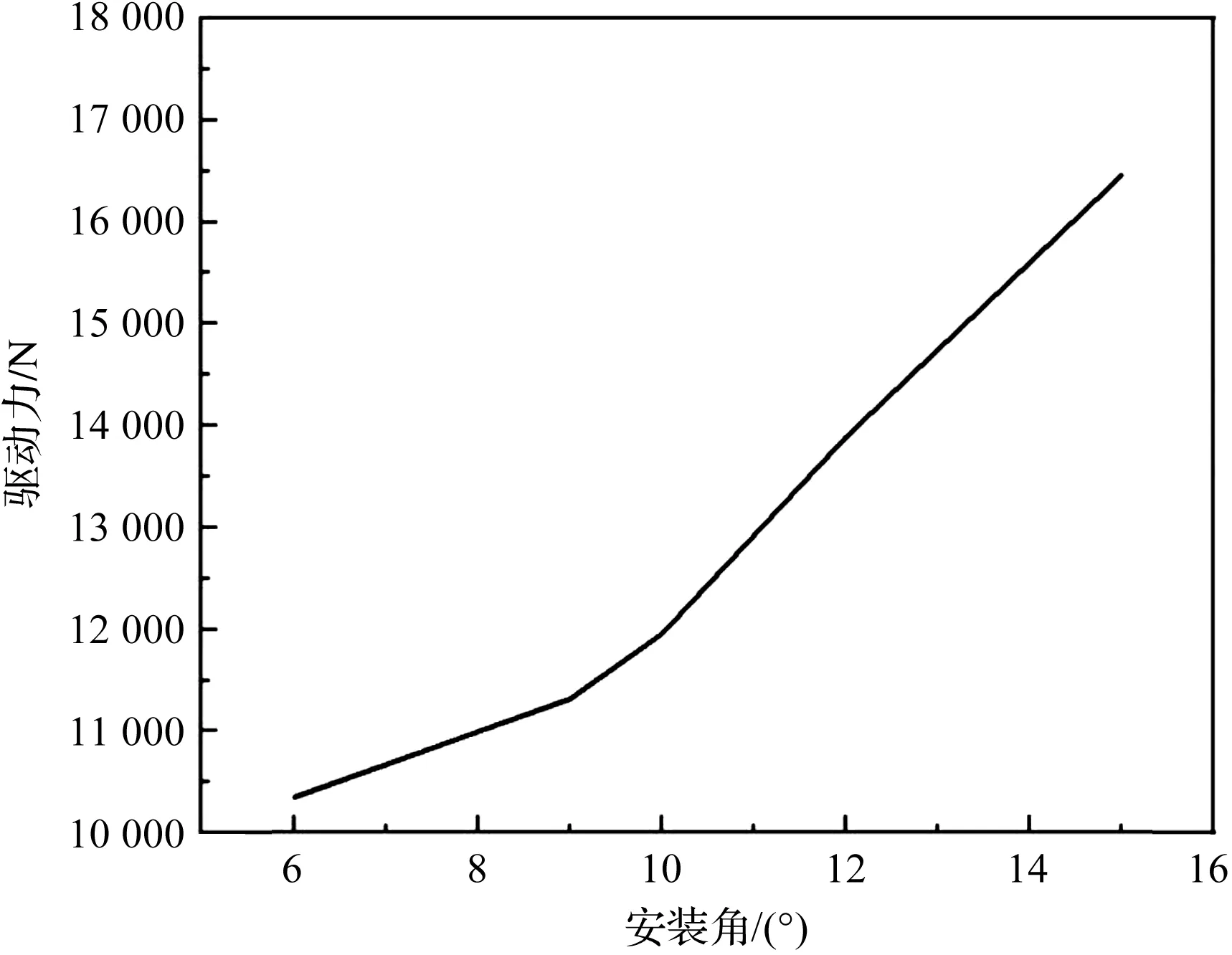
圖7 驅動力隨葉片安裝角變化
根據曲線圖7可知:所需驅動力隨著葉片安裝角度的增大而增大。
筆者以LF-92型號風機為研究對象,安裝角度范圍在6°~15°,驅動力最大需要值在安裝角度為15°時,可以達到16 500 N,所以液壓系統提供的驅動力最大值不能低于16 500 N。
4 基于AMESim的液壓仿真分析
4.1 液壓系統重要部件
液壓缸活塞桿伸出速度表達式為:
(12)
式中:V—伸出速度,m/s;q1—端口1流量,L/min;D—活塞直徑,m。
活塞桿退回的速度為:
(13)
式中:V2—伸出速度,m/s;q2—端口2流量,L/min;d—活塞桿直徑,m。
節流閥通過調節閥芯的移動來改變節流面積,從而達到調節流量大小的目的。通過節流閥的流量與其進出口壓力差關系如下:
(14)
式中,q—通過流量,L/min;Cq—最大流量系數;A—節流閥流通面積,m2;ΔP—進出口壓力差,Pa;ρ—液壓油密度,kg/m3。
調速閥在AMESim中的仿真模型如圖8所示。
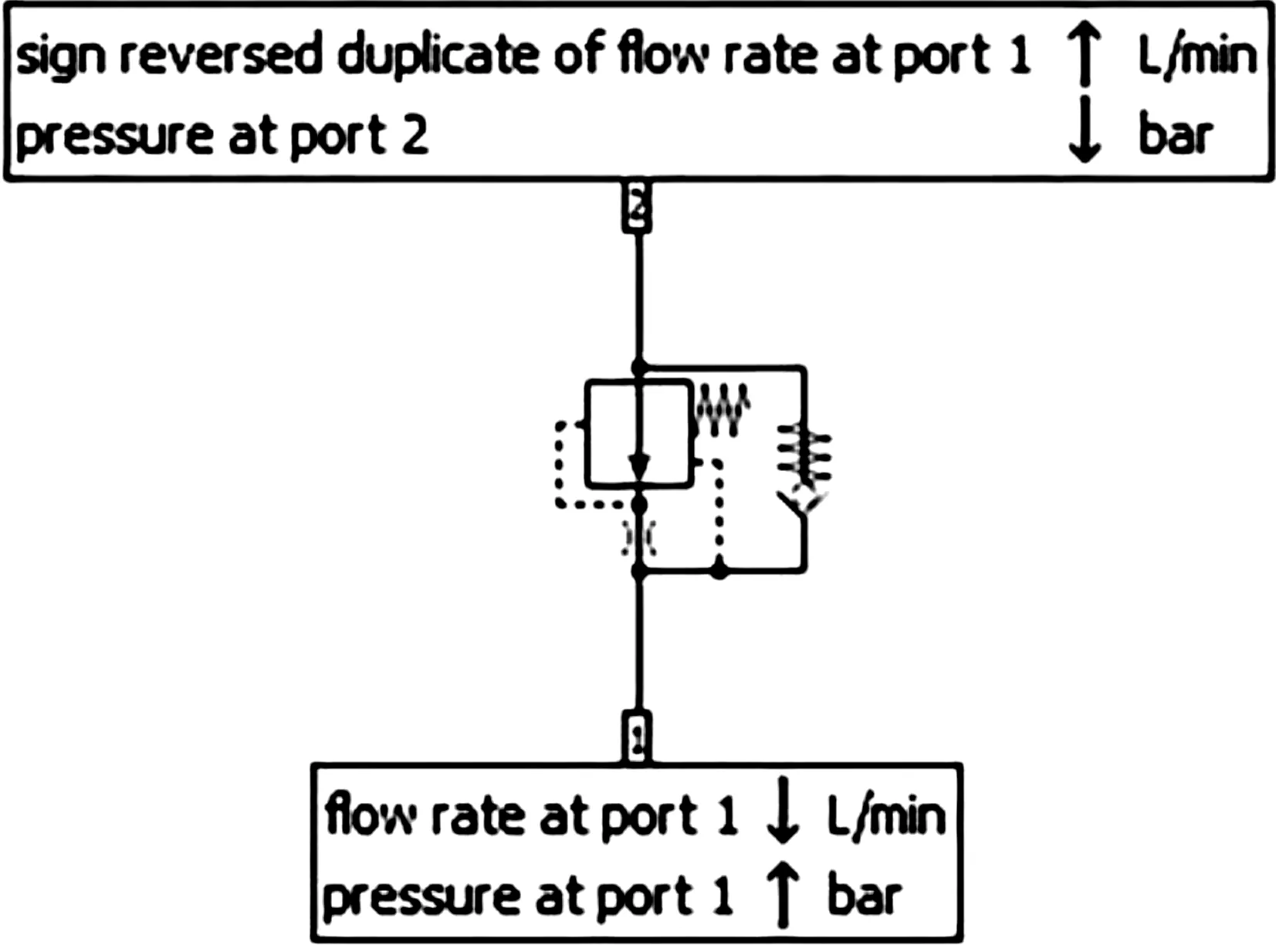
圖8 調速閥仿真模型
圖8中,當外負載壓力變化時,調速閥內部的補償器進行自動調整,使內部的壓差保持恒定,輸出穩定的流量[14,15]。
4.2 AMESim建模仿真
4.2.1 節流調速回路
筆者利用AMESim仿真平臺軟件,搭建了節流調速回路仿真模型[16-19],如圖9所示。
關鍵液壓元件的參數設置如表1所示。
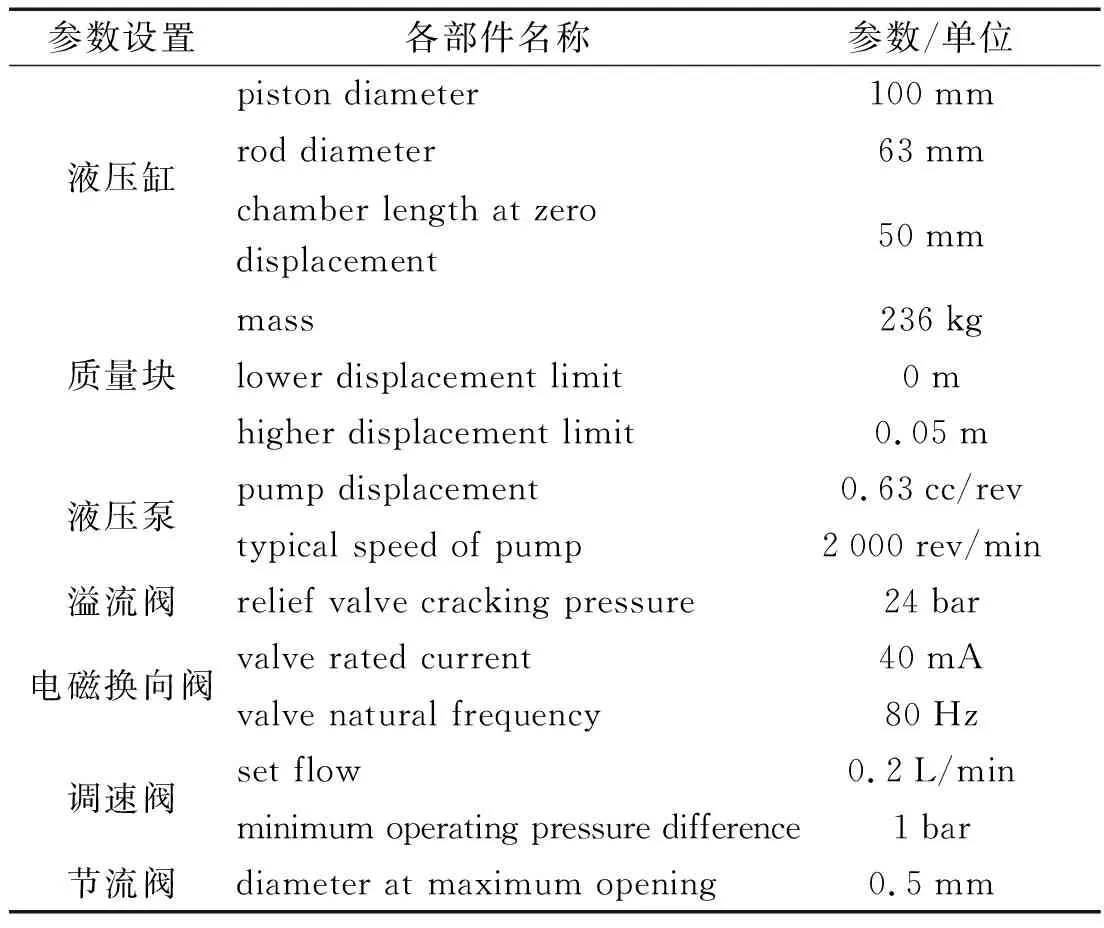
表1 參數設置表
筆者將仿真時間設置為160 s,并按照風機性能特性,針對LF-92型號的冷卻塔風機葉片安裝角度取6°、9°、12°和15°這4種角度進行調節,每次調節角度的時間為30 s,保持該角度工作的時間為10 s。仿真過程中以6°為初始安裝角度,依次遞增完成3次變角,最終葉片安裝角度保持在15°。
筆者根據葉片旋轉角度和升降板移動距離的關系[20,21],經計算,得到3次變角升降板的位移分別是6.3 mm、6.3 mm、6.4 mm。
兩種液壓回路中活塞桿的速度對比曲線如圖10所示。
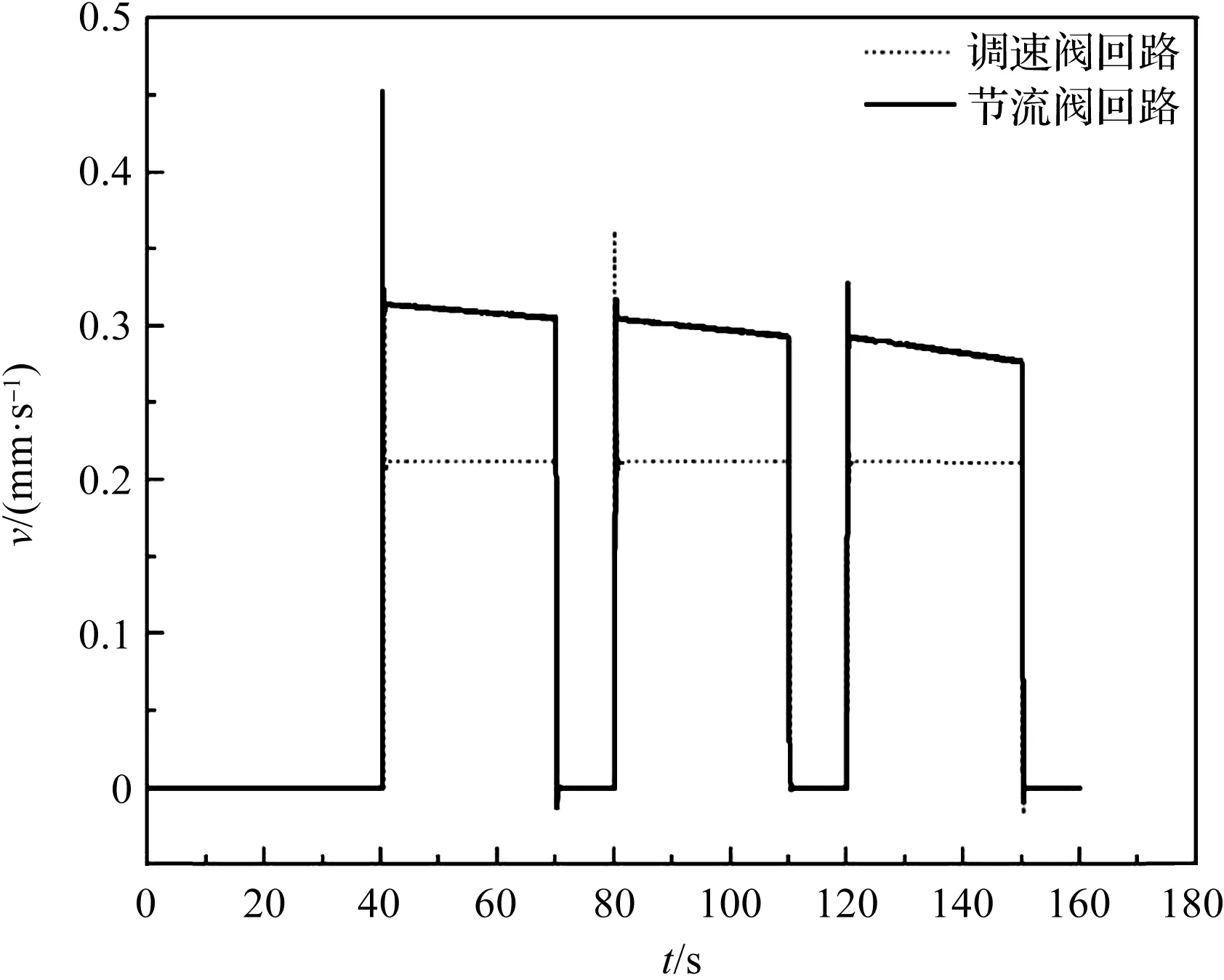
圖10 活塞桿速度對比曲線
從仿真結果對比分析來看:前40 s內,活塞桿始終保持在初始位置,葉片安裝角也保持在初始角度6°;當電磁換向閥處于右位狀態時,在采用節流閥的液壓回路中,節流閥進口壓力始終保持在溢流閥的壓力設定值,而負載不斷增大,則壓差逐漸減小,通過節流閥的流量隨著壓差的降低而減少,則活塞桿的伸出速度也隨之下降。
在采用調速閥的液壓回路中,由于其工作特性,通過調速閥的流量始終保持在設定值0.2 L/min,則通過每個液壓缸進油口的流量保持在0.1 L/min,根據式(12)得出活塞桿伸出速度為0.212 21 mm/s,而仿真結果中活塞桿伸出速度保持在0.212 mm/s左右,調速閥液壓回路具有更好的系統穩定性。
4.2.2 PID調速閥液壓回路
從以上分析結果也可看出:在采用調速閥的液壓回路中速度振蕩峰值較高,因此,在調速閥液壓回路的基礎上,筆者在兩個液壓缸線性連接點的輸出端,加入位移傳感器模塊MECDS0B,并在電磁換向閥處連接PID控制模塊PID00和變化信號增益模塊VGA-00,完成PID調速閥液壓回路模型搭建。
PID控制模塊的3個系數分別為KP=30、KI=20、KD=10,其余參數的設置如表1所示。
兩種液壓回路中活塞桿的位移對比曲線如圖11所示。
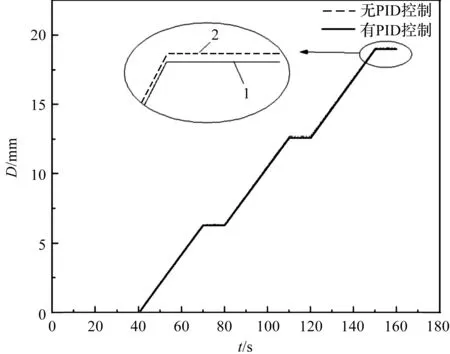
圖11 活塞桿位移對比曲線
在有PID調節的回路中,70 s時活塞桿的位移為6.299 71 mm,與理論計算結果相差0.000 29 mm;在仿真時間70 s~80 s時,電磁換向閥處于中止位,活塞桿的位移保持在6.303 67 mm;在仿真時間150 s時,活塞桿的位移為18.999 32 mm,與理論計算結果相差0.000 68 mm。
在沒有PID調節的回路中,70 s時活塞桿位移為6.306 28 mm,與理論計算結果相差0.006 28 mm;在仿真時間70 s~80 s時,電磁換向閥處于中止位,活塞桿的位移保持在6.332 41 mm;隨著偏差的累積,在仿真時間150 s時,活塞桿位移為19.031 82 mm,與理論計算結果相差0.031 82 mm。
對活塞桿縮回動作進行仿真分析的位移曲線如圖12所示。
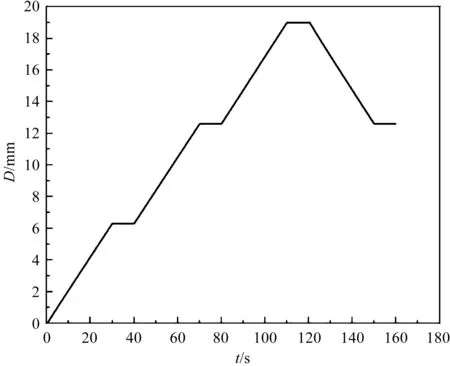
圖12 活塞桿縮回位移曲線
仿真時間依然設置為160 s,仿真過程中以6°為初始安裝角度,經過3次變角,最終葉片安裝角度保持在12°;70 s時活塞桿的位移為12.599 71 mm,150 s時活塞桿的位移為12.630 94 mm,按照控制信號的設置,70 s和150 s時的葉片安裝角度均是12°,仿真得出,兩次動作之后的活塞桿的位移差值為0.031 23 mm,其精度滿足系統運行要求。
4.2.3 PID調速閥HCD液壓回路
考慮調速閥的內部元件對液壓回路特性的影響,筆者利用AMESim的HCD庫搭建調速閥液壓回路,如圖13所示。
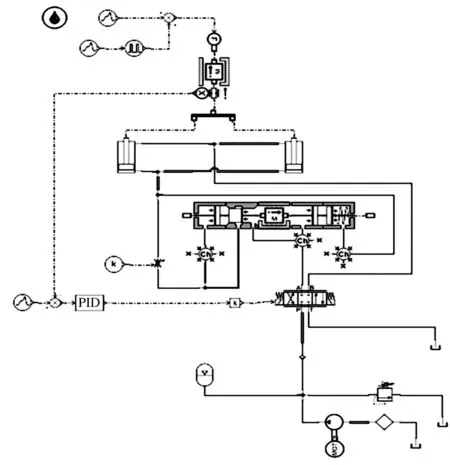
圖13 PID調速閥HCD液壓回路
筆者設定節流口開度的大小依次是:K=0.02,K=0.04,K=0.06,K=0.08,K=0.1,研究調速閥內部串聯的節流閥的節流口開度對回路速度特性的響應;同時加入脈沖信號,分別在活塞桿伸出、保持及縮回過程中施加1 000 N的擾動負載,持續時間為1 s。
節流口開度對活塞桿速度響應的影響結果,如圖14所示。
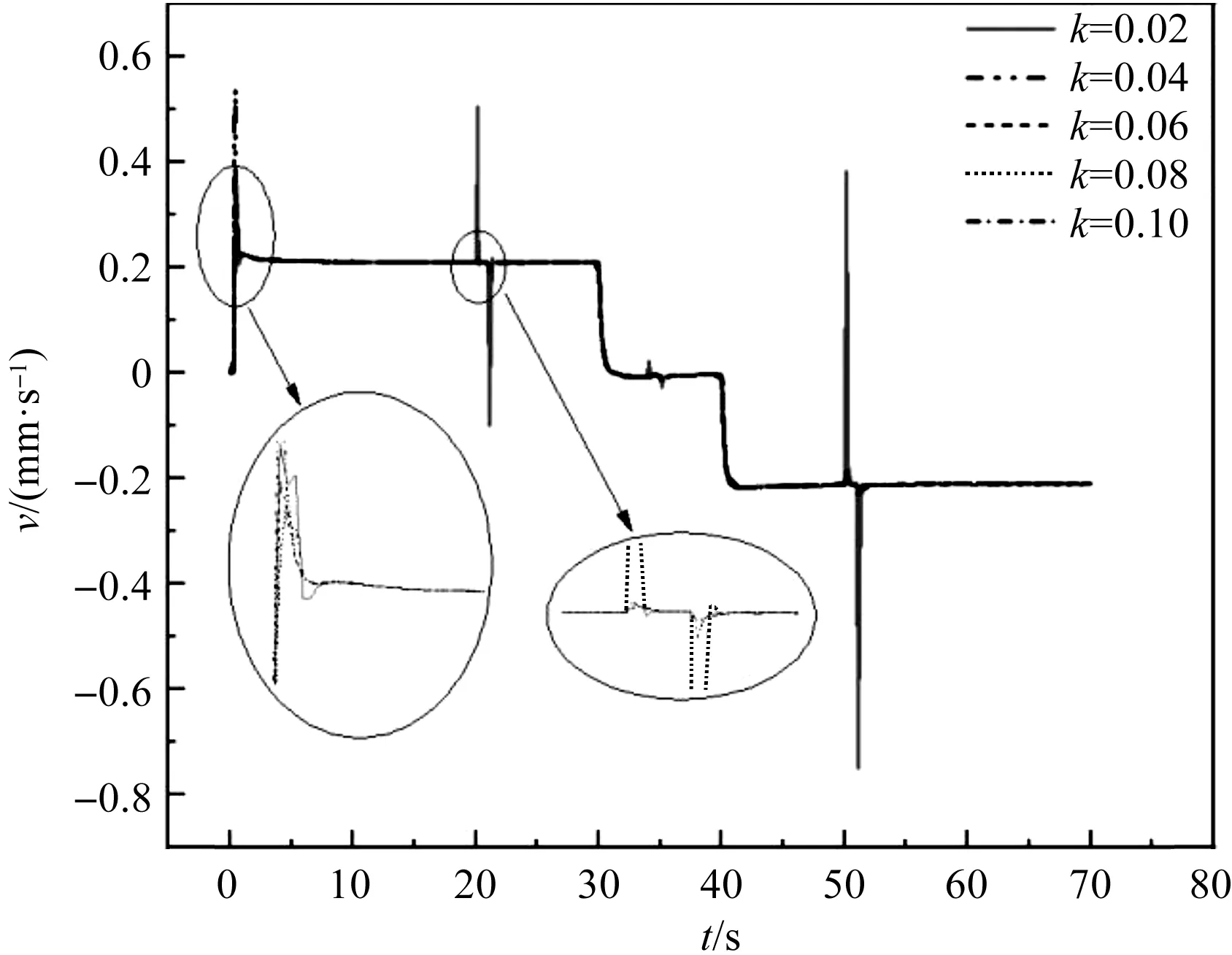
圖14 節流口開度對活塞桿速度響應的影響
當節流口開度K=0.02時,施加的擾動負載對活塞桿的伸出、縮回兩個過程的穩定性影響較大,振蕩時間約為2.1 s;K=0.08時的速度振蕩峰值為0.306 84 mm/s,K=0.1時的速度振蕩峰值為0.338 94 mm/s,在一定范圍內,隨著節流口開度的逐漸增大,調速閥的振蕩峰值逐漸減小,適當增大節流口開度,可以提高系統回路的穩定性,減少振蕩時間,取節流口開度K=0.08較為合適。
從以上仿真結果分析可知:采用PID調速閥液壓回路完成了風機葉片液壓自調角系統高精度工作,同時提高了系統運行的穩定性。
5 結束語
由于冷卻塔風機冷卻能力與實際需求不匹配,造成大量能源浪費,為此,筆者提出了一種基于液壓系統的冷卻塔風機葉片自調角的新型節能方法。首先,對自調角裝置進行原理分析和結構設計;然后,對液壓系統驅動力進行理論計算;最后,利用AMESim仿真軟件對多種液壓回路進行仿真分析,研究調速閥的內部元件節流口開度對液壓回路穩定性的影響。
研究結果表明:
(1)PID調速閥液壓回路中的速度保持穩定,活塞桿伸出的位移與理論計算結果相差0.000 68 mm,變化波動小,精度高;
(2)當節流口的開度K=0.08時,振蕩時間縮短27.27%,振蕩峰值減小43.16%,降低擾動負載對回路穩定性的影響;
(3)風機葉片自調角裝置采用了帶調速閥的液壓驅動系統,能夠在6°~15°范圍內實現多工況自適應多次變角,提高了系統的工作精度、穩定性和安全性。
在接下來的研究中,筆者將會搭建冷卻塔風機葉片液壓自調角裝置,在實際工況下,對結構設計的可行性進行驗證;同時通過增加葉片角度變化,以驗證液壓驅動系統的精度、穩定性以及控制效果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32