雙立柱式堆垛機(jī)三級(jí)貨叉剛度建模與優(yōu)化*
2023-02-13 05:58:24呂永鋒
機(jī)電工程 2023年1期
呂永鋒
(1.浙江機(jī)電職業(yè)技術(shù)學(xué)院 智能制造學(xué)院,浙江 杭州 310053;2.浙江工業(yè)大學(xué) 機(jī)械工程學(xué)院,浙江 杭州 310014)
0 引 言
隨著航空制造業(yè)成為我國(guó)戰(zhàn)略發(fā)展新興產(chǎn)業(yè),各航空制造企業(yè)也正在推行數(shù)字化生產(chǎn)與智能工廠,其發(fā)展離不開(kāi)工廠內(nèi)倉(cāng)儲(chǔ)物流技術(shù)水平的提升。
因具備空間使用效率高、儲(chǔ)存成本低以及自動(dòng)化管理能力強(qiáng)等特點(diǎn),以堆垛機(jī)為核心的自動(dòng)化立體倉(cāng)庫(kù)得到了廣泛應(yīng)用。
堆垛機(jī)是自動(dòng)化立體倉(cāng)庫(kù)的關(guān)鍵設(shè)備,貨叉組件則是叉取貨物的主要裝置。貨叉伸出時(shí)容易產(chǎn)生較大變形,嚴(yán)重時(shí)會(huì)影響堆垛機(jī)取貨精度甚至發(fā)生安全性問(wèn)題,因此,需要對(duì)貨叉組件的剛度進(jìn)行建模與結(jié)構(gòu)優(yōu)化設(shè)計(jì)。
針對(duì)堆垛機(jī)貨叉在叉取過(guò)程中產(chǎn)生的變形進(jìn)而影響取貨精度這一問(wèn)題,研究人員分別圍繞堆垛機(jī)主體與貨叉結(jié)構(gòu)展開(kāi)了相關(guān)研究。
對(duì)于堆垛機(jī)主體問(wèn)題,劉葉艷[1]對(duì)其進(jìn)行了動(dòng)載荷作用下的受力分析,以立柱結(jié)構(gòu)為優(yōu)化對(duì)象,立柱頂端撓度和立柱根部所受應(yīng)力為優(yōu)化目標(biāo),提出了3種結(jié)構(gòu)優(yōu)化方案,并確定了最優(yōu)方案。丁力等人[2]提出了一種門式堆垛機(jī)的結(jié)構(gòu)分析方法,為雙立柱堆垛機(jī)的結(jié)構(gòu)分析提供了參考。唐秀英等人[3]研究了高度為24 m的堆垛機(jī)的工況載荷結(jié)構(gòu)受力和模態(tài)特性,以驗(yàn)證其是否符合強(qiáng)度和振動(dòng)要求。成家豪等人[4]應(yīng)用極限狀態(tài)設(shè)計(jì)法和模態(tài)分析理論,對(duì)超高雙立柱堆垛機(jī)貨叉結(jié)構(gòu)進(jìn)行了分析,為超高堆垛機(jī)的設(shè)計(jì)提供了理論依據(jù)。
除堆垛機(jī)主體外,貨叉組件同樣也是影響取貨精度的重要因素。宋章領(lǐng)等人[5]根據(jù)三級(jí)貨叉的結(jié)構(gòu)與工作原理,推導(dǎo)了三級(jí)貨叉的撓度計(jì)算方法,并開(kāi)發(fā)出了相應(yīng)的貨叉撓度計(jì)算程序。師鵬勛[6]根據(jù)疊加原理,得到了三級(jí)貨叉的撓度理論計(jì)算公式,并據(jù)此求解了三級(jí)貨叉在最大載荷下的撓度值。童水光等人[7]針對(duì)二級(jí)貨叉所產(chǎn)生的應(yīng)力集中現(xiàn)象,采用有限元軟件建立了貨叉的優(yōu)化模型,使其整體剛度提升了20.9%,應(yīng)力降低了13.8%。邱偉星[8]采用有限元軟件,求解出了多種工況下二級(jí)貨叉的強(qiáng)度與剛度。
但是,目前針對(duì)貨叉組件的變形與優(yōu)化研究主要集中在二級(jí)貨叉方面。而對(duì)于三級(jí)貨叉的剛度建模以及多尺寸的結(jié)構(gòu)優(yōu)化問(wèn)題,則仍然缺乏針對(duì)性的研究。
筆者圍繞三級(jí)貨叉的剛度建模與尺寸優(yōu)化展開(kāi)研究。首先,介紹一種門式堆垛機(jī)結(jié)構(gòu),詳細(xì)地分析多級(jí)直線差動(dòng)式貨叉的工作原理;其次,基于理論力學(xué)與材料力學(xué)建立三級(jí)貨叉組件的力學(xué)模型,求解得到貨叉組件在多組載荷下的撓度;最后,通過(guò)有限元仿真,得到三級(jí)貨叉各零部件的變形云圖,并針對(duì)三級(jí)貨叉的7個(gè)關(guān)鍵尺寸完成多目標(biāo)優(yōu)化。
1 堆垛機(jī)與多級(jí)貨叉
1.1 堆垛機(jī)結(jié)構(gòu)
堆垛機(jī)作為自動(dòng)化立體倉(cāng)庫(kù)中最主要的搬運(yùn)設(shè)備,主要功能是在高層貨架之間的巷道中運(yùn)行,將貨物從貨架搬運(yùn)至巷道口或者從巷道口搬運(yùn)到貨架中,從而實(shí)現(xiàn)貨物的流動(dòng)工作目的。
筆者設(shè)計(jì)的門式堆垛機(jī)主要由行走機(jī)構(gòu)、提升機(jī)構(gòu)、貨叉組件、龍門、底座等組成,如圖1所示。
行走機(jī)構(gòu)采用電機(jī)驅(qū)動(dòng)、滾輪導(dǎo)向、齒輪齒條傳動(dòng)形式,可實(shí)現(xiàn)堆垛機(jī)沿軌道水平運(yùn)行。提升機(jī)構(gòu)由電機(jī)驅(qū)動(dòng)、滾輪導(dǎo)向、鋼絲繩傳動(dòng)形式,可實(shí)現(xiàn)貨叉組件的豎直升降。門式堆垛機(jī)通過(guò)行走機(jī)構(gòu)、提升機(jī)構(gòu)以及貨叉組件的配合,可實(shí)現(xiàn)貨物的搬運(yùn)。
1.2 貨叉組件的設(shè)計(jì)結(jié)構(gòu)
貨叉組件由伺服電機(jī)、蝸輪蝸桿減速器、傳動(dòng)裝置、兩組多級(jí)貨叉以及直線滑塊導(dǎo)軌組成。伺服電機(jī)經(jīng)過(guò)一級(jí)減速器,將運(yùn)動(dòng)傳遞給多級(jí)貨叉,實(shí)現(xiàn)貨叉的伸展與收回,實(shí)現(xiàn)貨物叉取目的。
多級(jí)貨叉組件結(jié)構(gòu)如圖2所示。

圖2 多級(jí)貨叉組件結(jié)構(gòu)
此外,為適應(yīng)不同寬度貨物的叉取工作,筆者將兩組多級(jí)貨叉安裝在滑塊直線導(dǎo)軌上,以便可以隨時(shí)調(diào)節(jié)兩組貨叉的距離。
1.3 多級(jí)貨叉工作原理
由于堆垛機(jī)在巷道內(nèi)的運(yùn)行空間受限,為保證貨叉收回的空間較小且貨叉伸展距離足夠,堆垛機(jī)一般采用二級(jí)或者三級(jí)直線差動(dòng)式貨叉作為叉取裝置(雖然四級(jí)貨叉能夠?qū)崿F(xiàn)更長(zhǎng)的伸展距離,但工作時(shí)可能由于變形過(guò)大造成危險(xiǎn),所以一般不作考慮)。
單組二級(jí)貨叉由上叉、底叉以及相應(yīng)的傳動(dòng)機(jī)構(gòu)組成。而三組貨叉則在二級(jí)的基礎(chǔ)上,在上叉與底叉之間再增加中叉及對(duì)應(yīng)的傳動(dòng)機(jī)構(gòu)。底叉安裝在滑塊上,二級(jí)貨叉中上叉與底叉采用齒輪齒條機(jī)構(gòu)作為傳動(dòng)裝置,電機(jī)帶動(dòng)花鍵齒輪運(yùn)動(dòng)可實(shí)現(xiàn)上叉相對(duì)于底叉的運(yùn)動(dòng)。而三級(jí)貨叉的中叉與底叉采用齒輪齒條機(jī)構(gòu)作為傳動(dòng)裝置,中叉與上叉之間裝有多組特殊滾輪。
同樣,電機(jī)帶動(dòng)花鍵齒輪運(yùn)動(dòng)可實(shí)現(xiàn)中叉相對(duì)于底叉的運(yùn)動(dòng),同時(shí)上叉也會(huì)相對(duì)于中叉運(yùn)動(dòng),實(shí)現(xiàn)兩倍速度的傳動(dòng)。
多級(jí)直線差動(dòng)式貨叉的受力點(diǎn)為O、A、B、C、D、E和G,其工作原理如圖3所示。
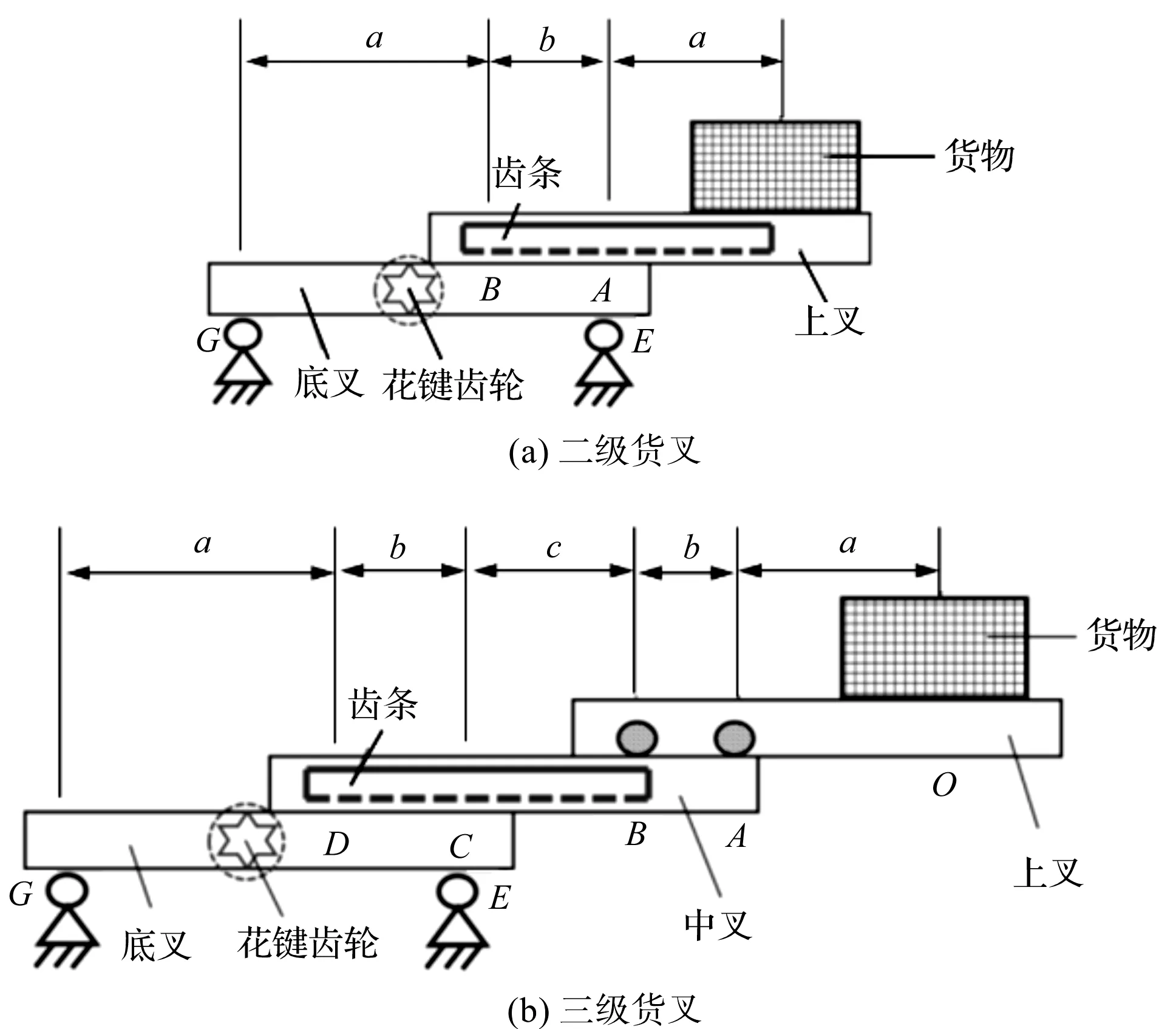
圖3 多級(jí)直線差動(dòng)貨叉工作原理圖
2 多級(jí)貨叉組件末端剛度建模
為了避免貨叉組件在叉取貨物時(shí),出現(xiàn)剛度不足的問(wèn)題,需對(duì)貨叉末端撓度進(jìn)行求解。筆者基于理論力學(xué)與材料力學(xué)理論,建立貨叉的力學(xué)模型,并通過(guò)疊加原理對(duì)其剛度進(jìn)行求解。
2.1 二級(jí)貨叉組件剛度建模
(1)力學(xué)建模
筆者對(duì)上述的二級(jí)貨叉結(jié)構(gòu)簡(jiǎn)圖進(jìn)行拆解處理,并對(duì)上叉進(jìn)行受力分析,得到上叉的力學(xué)模型,如圖4所示。
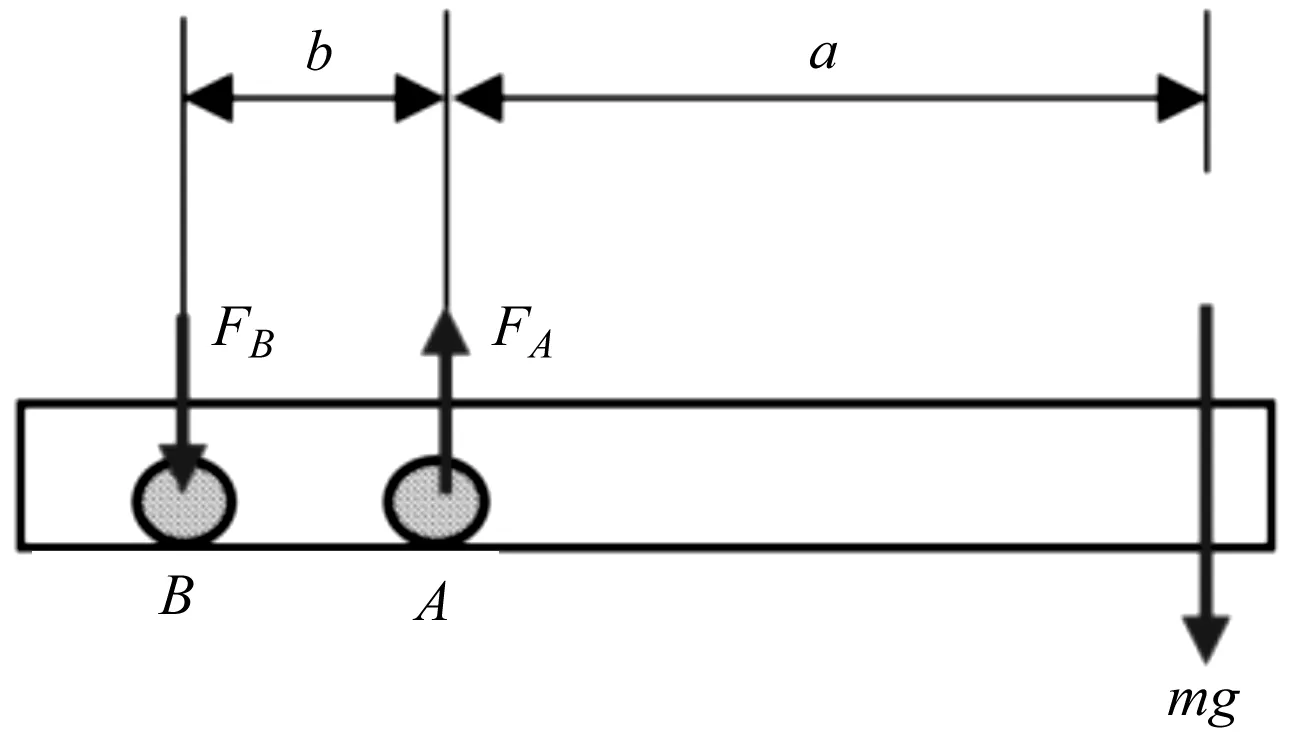
圖4 上叉力學(xué)模型
貨叉組件由兩組二級(jí)貨叉組成,計(jì)算時(shí)將貨物重力平均分配給兩組貨叉。
對(duì)上叉進(jìn)行受力分析得到平衡方程:
(1)
式中:FA,FB—A、B兩點(diǎn)的作用力;m—貨物質(zhì)量;a,b—各支點(diǎn)的距離。
經(jīng)求解可得:
(2)
(2)末端剛度建模
求解得到各個(gè)支點(diǎn)受力后,可通過(guò)材料力學(xué)理論公式求解各級(jí)貨叉的最大撓度。求解上叉末端撓度時(shí),將A、B兩點(diǎn)作為支承點(diǎn),可求得上叉的最大轉(zhuǎn)角θmax1與最大撓度wmax1為:
(3)
(4)
式中:Ii(i=1,2)—貨叉組件上叉與底叉的截面慣性矩;E—貨叉材料的彈性模量。
求解底叉撓度時(shí),將E、G兩點(diǎn)作為支承點(diǎn),可以求得底叉的最大轉(zhuǎn)角θmax3為:
(5)
求解得到各級(jí)貨叉的轉(zhuǎn)角與撓度后,建立二級(jí)貨叉剛度模型,如圖5所示。
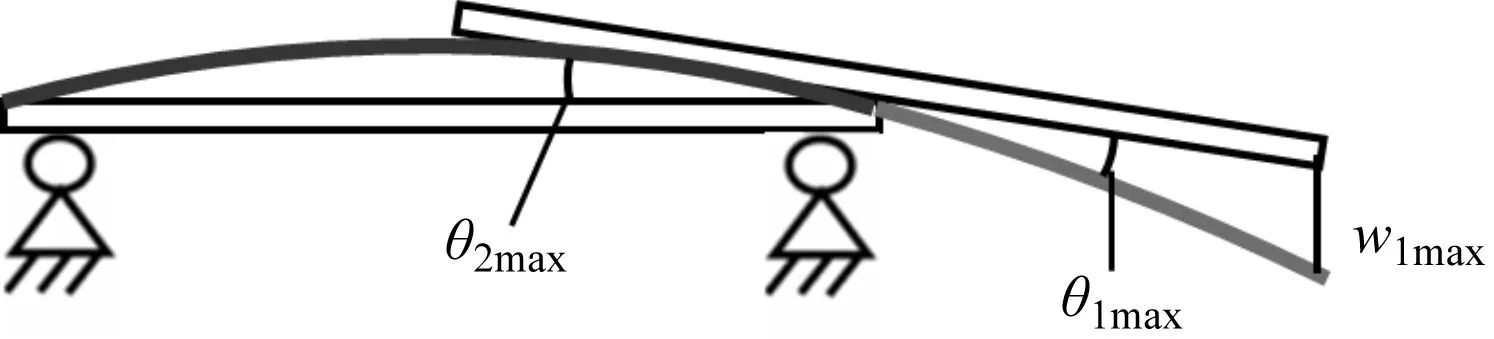
圖5 二級(jí)貨叉剛度建模
采用疊加原理可求得貨叉的總轉(zhuǎn)角θ與總撓度w為:
(6)
w=wmax1+2aθmax2
(7)
2.2 三級(jí)貨叉組件剛度建模
(1)力學(xué)建模
同理,筆者對(duì)上述的三級(jí)貨叉結(jié)構(gòu)簡(jiǎn)圖進(jìn)行拆解處理,分別對(duì)上叉與中叉進(jìn)行受力分析,得到上叉與中叉的力學(xué)模型如圖6所示。
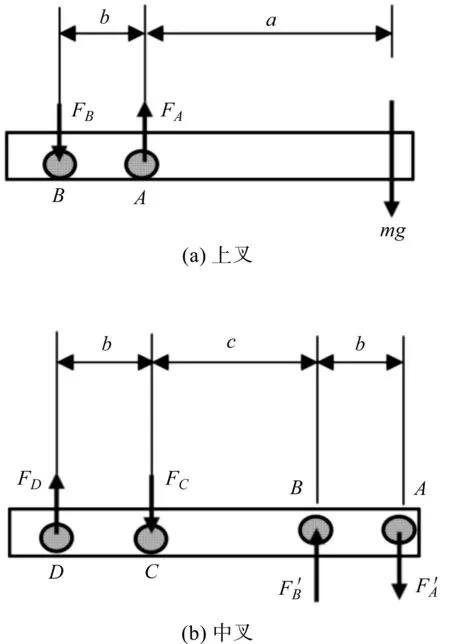
圖6 力學(xué)模型
對(duì)上叉進(jìn)行受力分析得到平衡方程:
(8)
式中:FA,F(xiàn)B—A、B兩點(diǎn)的作用力;m—貨物質(zhì)量;a,b,c—各支點(diǎn)的距離。
根據(jù)貨叉伸出長(zhǎng)度的關(guān)系得a=b+c。
對(duì)中叉進(jìn)行受力分析,得到平衡方程:
(9)

經(jīng)求解可得:
(10)
(2)末端剛度建模
同理,將A、B兩點(diǎn)作為支承點(diǎn),可以求得上叉的最大轉(zhuǎn)角θmax1與最大撓度wmax1為:
(11)
(12)
式中:Ii(i=1,2,3)—貨叉組件上叉、中叉與底叉的截面慣性矩;E—貨叉材料的彈性模量。
求解中叉末端撓度時(shí),將C、D兩點(diǎn)作為支承點(diǎn),可求得中叉的最大轉(zhuǎn)角θmax2與最大撓度wmax2為:
(13)
(14)
求解底叉撓度時(shí),將E、G兩點(diǎn)作為支承點(diǎn),可求得底叉的最大轉(zhuǎn)角θmax3為:
(15)
求解得到各級(jí)貨叉的轉(zhuǎn)角與撓度后,建立剛度模型如圖7所示。
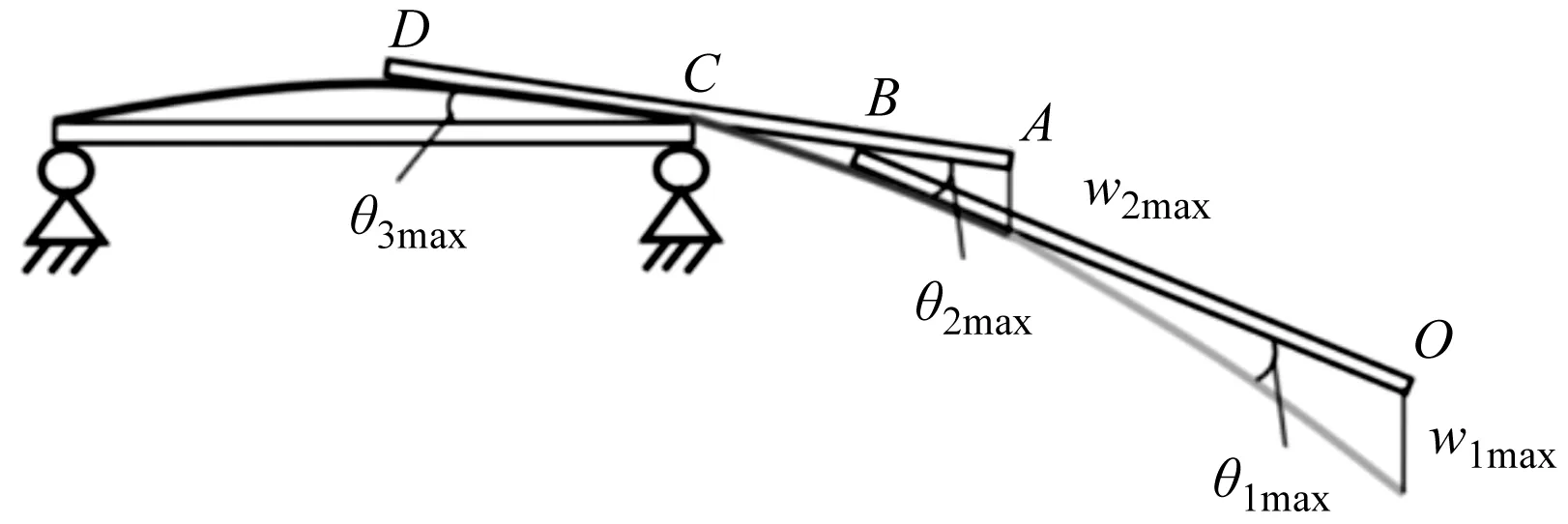
圖7 貨叉剛度建模
同樣地通過(guò)疊加原理可求得貨叉的總轉(zhuǎn)角θ與總撓度w為:
(16)
(17)
2.3 貨叉組件末端剛度計(jì)算實(shí)例
此處以三級(jí)貨叉為例,根據(jù)堆垛機(jī)結(jié)構(gòu)尺寸等參數(shù),可以得到三級(jí)貨叉組件的參數(shù):
貨叉采用Q345材料,其彈性模量為206 GPa、泊松比為0.3、密度為7.85 g/cm3;上叉、中叉以及底叉的截面慣性矩分別為8.75×105mm4、1.64×106mm4、4.85×105mm4;各支點(diǎn)距離a,b,c分別為600 mm,400 mm以及200 mm。將其代入式(2)與式(6),可求得當(dāng)貨物質(zhì)量為100 kg、200 kg、300 kg、400 kg、500 kg時(shí),三級(jí)貨叉撓度的理論值為1.364 mm、2.728 mm、4.092 mm、5.456 mm以及6.823 mm。
3 多級(jí)貨叉組件結(jié)構(gòu)有限元分析
為驗(yàn)證貨叉末端剛度建模的準(zhǔn)確性以及貨叉結(jié)構(gòu)的安全性,可采取有限元方法對(duì)貨叉組件進(jìn)行結(jié)構(gòu)靜力學(xué)求解,得到貨叉組件的變形量與應(yīng)力云圖。
此處,筆者以三級(jí)貨叉為例進(jìn)行分析。
微生物采油是一項(xiàng)提高采收率的新技術(shù),對(duì)于部分注汽末期的油井,可以考慮采用這種方法。微生物開(kāi)采技術(shù)主要包括生物表面活性化技術(shù)和微生物降解技術(shù)。微生物在生長(zhǎng)的過(guò)程中所產(chǎn)生的生物酶能改變石油中的碳鏈組成,使其豁度降低,流動(dòng)性增加,易于采出;微生物菌液還能使孔隙壁下殘留的油段或油滴的油膜剝落而使其流動(dòng);微生物的乳化作用還能使儲(chǔ)層中的剩余油被啟動(dòng),從而被采出。該項(xiàng)技術(shù)的優(yōu)點(diǎn)在于投資少,效益好而且與其他方法相比更加環(huán)保。
3.1 貨叉組件有限元建模
根據(jù)搬運(yùn)需求給定貨物最大質(zhì)量為500 kg,對(duì)貨叉組件進(jìn)行有限元建模,具體步驟如下:
(1)將三級(jí)貨叉組件模型進(jìn)行簡(jiǎn)化,將不影響結(jié)構(gòu)分析的部分刪去[5,6],如電機(jī)驅(qū)動(dòng)模塊等,并刪除倒角、凹槽以及螺紋孔等,將簡(jiǎn)化模型導(dǎo)入有限元軟件ANSYS Workbench中;
(2)對(duì)貨叉組件進(jìn)行材料屬性定義,貨叉采用Q345鋼材料;
(3)所有接觸位置添加綁定接觸;
(4)采用自動(dòng)網(wǎng)格劃分方法,將三級(jí)貨叉的網(wǎng)格設(shè)置為5 mm,其余部分設(shè)置為20 mm;
(5)對(duì)貨叉支架施加固定約束,在兩個(gè)三級(jí)貨叉的末端共同施加大小為4 900 N、方向?yàn)樨Q直向下的集中力。
堆垛機(jī)有限元模型如圖8所示。
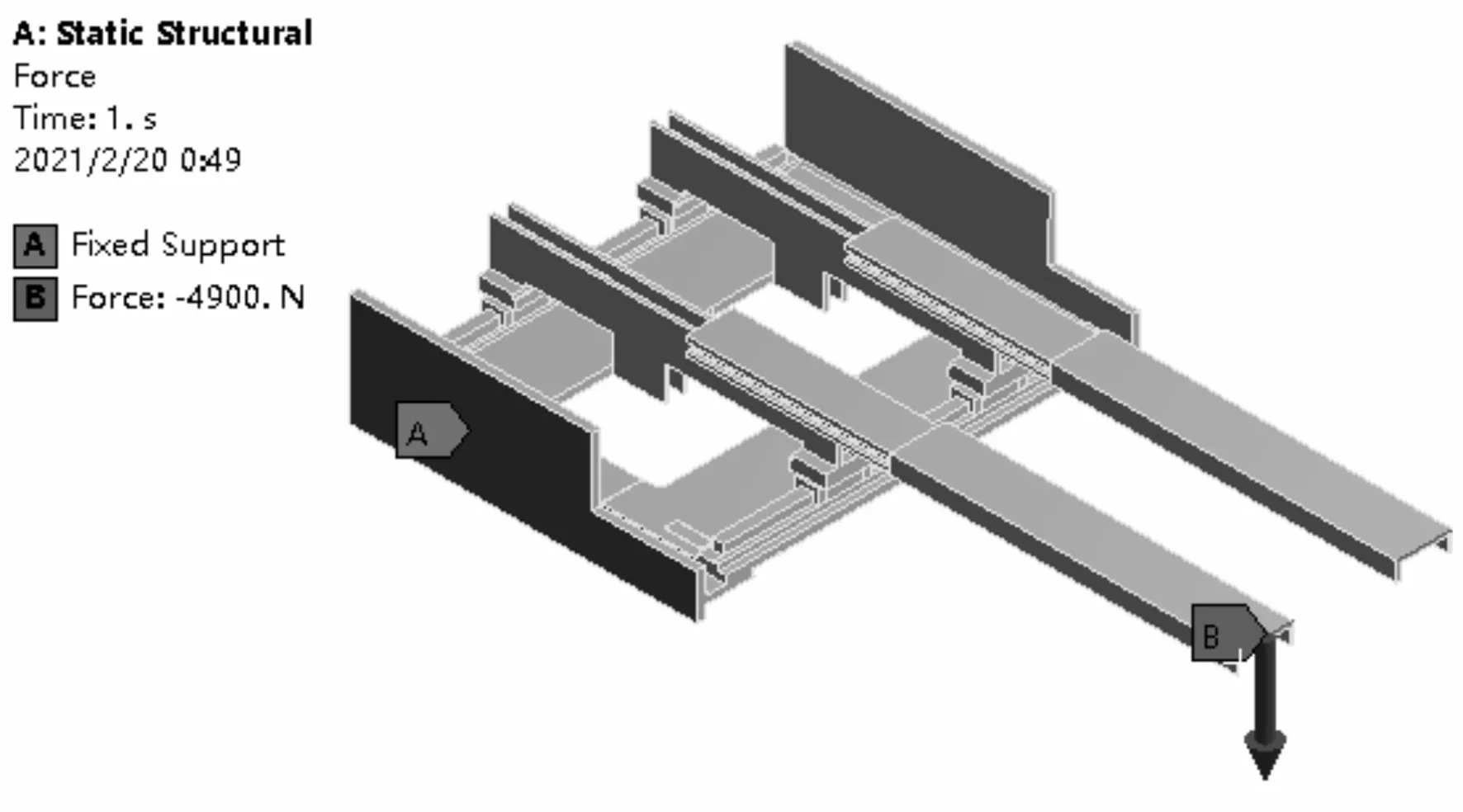
圖8 堆垛機(jī)有限元模型
3.2 貨叉整體靜力學(xué)求解
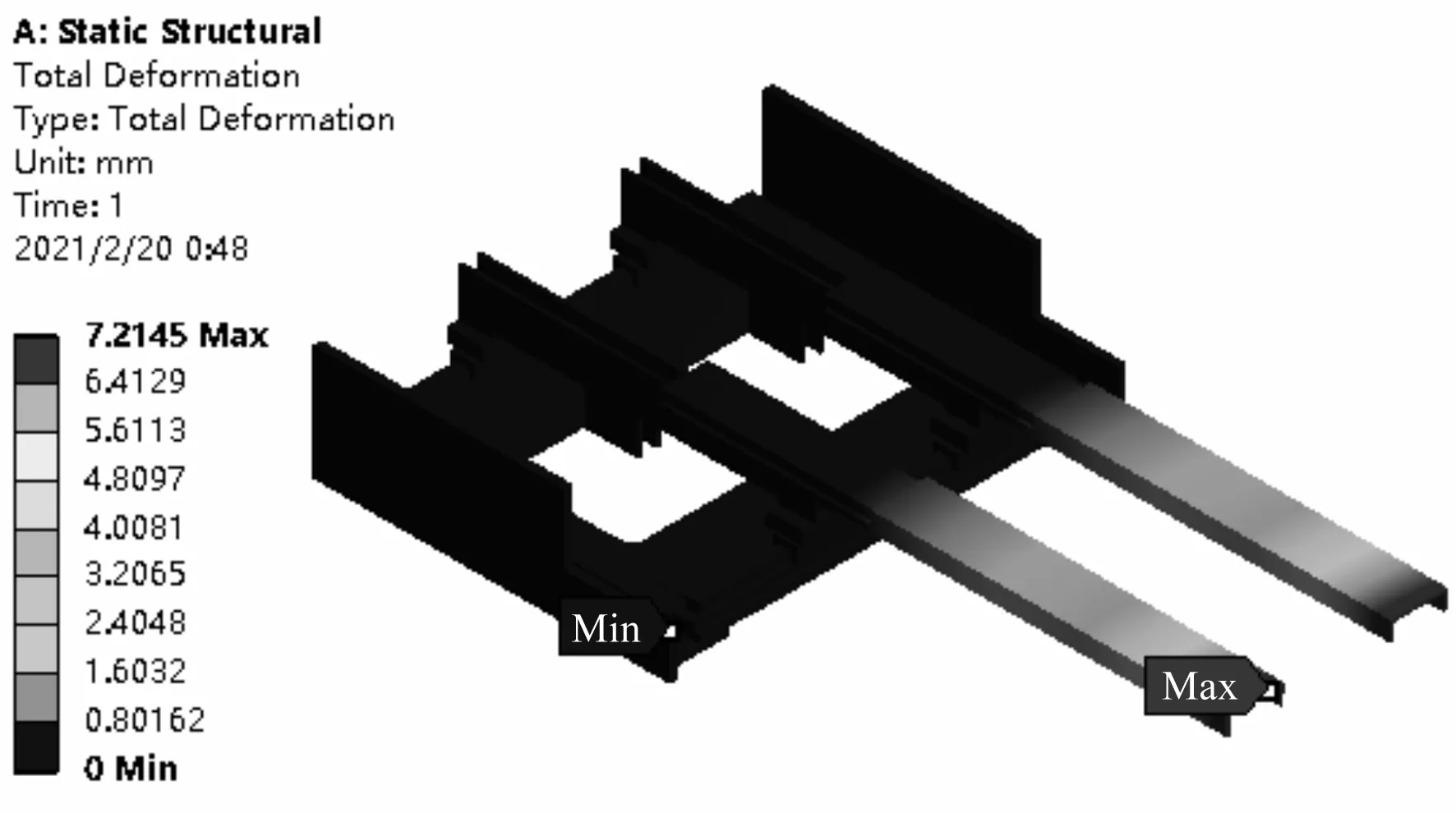
圖9 貨叉組件的變形量云圖
求解得到貨叉組件的應(yīng)力云圖如圖10所示。

圖10 貨叉組件的應(yīng)力云圖
由圖(9,10)可知:承載500 kg貨物時(shí),貨叉組件最大變形量發(fā)生在貨叉末端,其值為7.215 mm。
最大應(yīng)力發(fā)生在上叉與中叉結(jié)合部,其值為102.70 MPa,遠(yuǎn)小于Q345材料的許用應(yīng)力345 MPa,其強(qiáng)度滿足設(shè)計(jì)需求。
為避免貨叉出現(xiàn)應(yīng)力集中現(xiàn)象,可在各級(jí)貨叉之間添加輔助支撐。
筆者求解貨叉組件在5組載荷下的撓度值,將其結(jié)果與理論值進(jìn)行對(duì)比,如圖11所示。
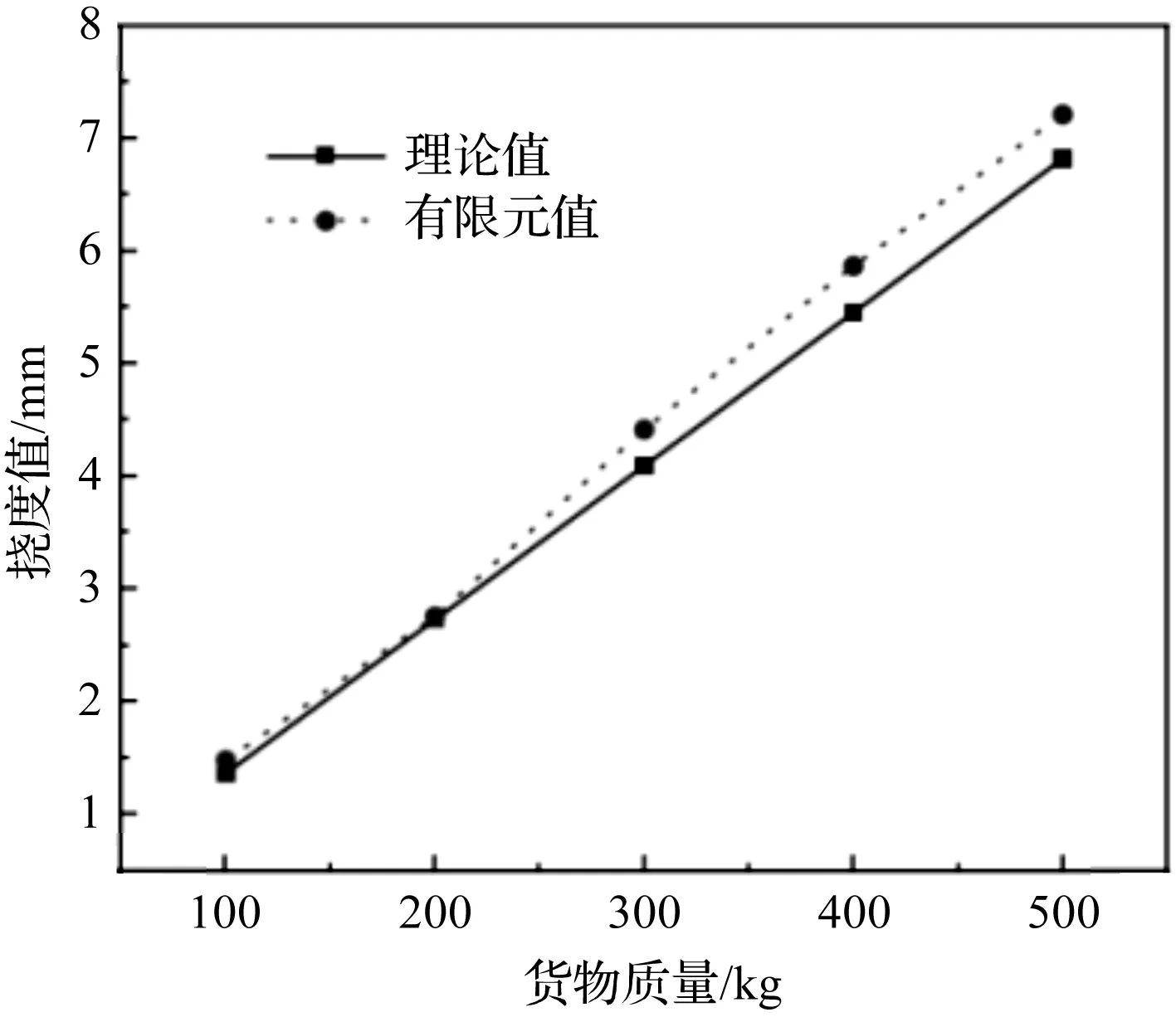
圖11 貨叉組件末端撓度對(duì)比
由圖11可知:有限元求解的撓度要略高于理論計(jì)算值,撓度偏差值為5.7%,驗(yàn)證了理論計(jì)算的可靠性。
4 多級(jí)貨叉組件截面參數(shù)優(yōu)化
作為堆垛機(jī)叉取貨物的關(guān)鍵部件,貨叉組件的整體剛度必將影響叉取貨物的穩(wěn)定性與準(zhǔn)確性。為進(jìn)一步增強(qiáng)三級(jí)貨叉組件的剛度,筆者對(duì)三級(jí)貨叉組件的各級(jí)貨叉截面進(jìn)行優(yōu)化,通過(guò)有限元軟件選取其最優(yōu)截面參數(shù)。
4.1 貨叉組件優(yōu)化模型
筆者采用ANSYS Workbench中響應(yīng)面分析法進(jìn)行多目標(biāo)參數(shù)優(yōu)化,針對(duì)上叉與中叉的7個(gè)尺寸進(jìn)行優(yōu)化,并將尺寸參數(shù)作為設(shè)計(jì)參數(shù)導(dǎo)入模型,如圖12所示。

圖12 貨叉組件的設(shè)計(jì)參數(shù)
考慮到貨叉的結(jié)構(gòu)與有限元算法的可適用性,該優(yōu)化設(shè)計(jì)用多目標(biāo)優(yōu)化方法,采用Screening篩選算法對(duì)其求解。其優(yōu)化目標(biāo)為:整體的最大變形量盡可能減小,整體的最大應(yīng)力盡可能減小,同時(shí)上叉與中叉的質(zhì)量要最小。
建立其優(yōu)化的數(shù)學(xué)模型為:
(18)
式中:X={P1,P2,P3,…,P7}T—設(shè)計(jì)參數(shù);m(X)—上叉與中叉的整體質(zhì)量;σ(X)—貨叉受到的最大應(yīng)力;d(dv)—貨叉最大變形量;Pimax,Pimin—各個(gè)設(shè)計(jì)參數(shù)取值的上下限。
4.2 參數(shù)優(yōu)化分析步驟
該優(yōu)化采用三維軟件SolidWorks與有限元軟件Workbench聯(lián)合仿真,通過(guò)有限元軟件求得最優(yōu)參數(shù)后,可以直接在三維軟件中自動(dòng)生成優(yōu)化后的模型。
具體步驟如下:
(1)首先根據(jù)圖12對(duì)三級(jí)貨叉的相關(guān)參數(shù)進(jìn)行變量名設(shè)置,將上述參數(shù)名改為DS_Pi(i=1,2…,7)導(dǎo)入Workbench后將其設(shè)置為設(shè)計(jì)參數(shù)[9,10];
(2)根據(jù)靜力學(xué)分析步驟,求解貨叉受到4 900 N集中力時(shí)的最大變形量與最大應(yīng)力,將上叉與中叉質(zhì)量以及最大變形量與最大應(yīng)力值設(shè)置為輸出參數(shù);
(3)添加響應(yīng)面分析模塊,對(duì)各個(gè)設(shè)計(jì)變量設(shè)置上下限[11,12],加載設(shè)計(jì)實(shí)驗(yàn)并更新,可以得到多組計(jì)算實(shí)例,如表1所示。
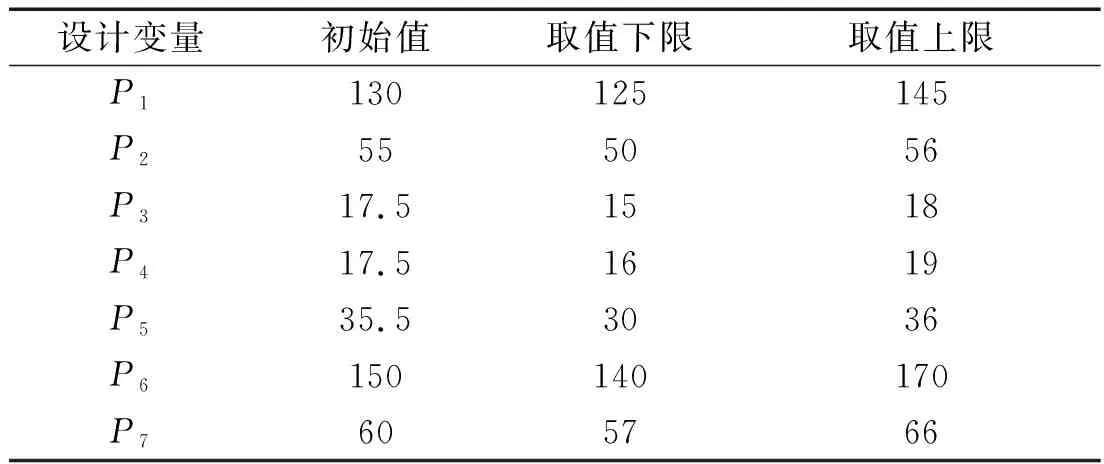
表1 設(shè)計(jì)點(diǎn)計(jì)算結(jié)果 (單位:mm)
(4)查看各參數(shù)對(duì)貨叉變形量、應(yīng)力以及質(zhì)量的影響面[13,14],如圖13所示。

圖13 P1、P2對(duì)貨叉應(yīng)力和變形量的響應(yīng)面
(5)繪制7個(gè)設(shè)計(jì)變量對(duì)各個(gè)輸出參數(shù)的敏感度因子。
由此可知P1對(duì)于貨叉應(yīng)力的影響因子為正,減小該尺寸可以有效減小貨叉應(yīng)力;P2與P5的敏感度為負(fù),增大該尺寸可有效減小貨叉應(yīng)力。
此外,P2對(duì)于貨叉變形量的影響最大且為負(fù),增大該尺寸可有效減小貨叉整體變形量[15],如圖14所示。
(6)根據(jù)優(yōu)化目標(biāo)函數(shù)進(jìn)行優(yōu)化設(shè)置,得到三組優(yōu)化參考點(diǎn)[16]。
選取第3組參考點(diǎn)為最優(yōu)方案,取整后求解貨叉變形量與應(yīng)力,如表2所示。
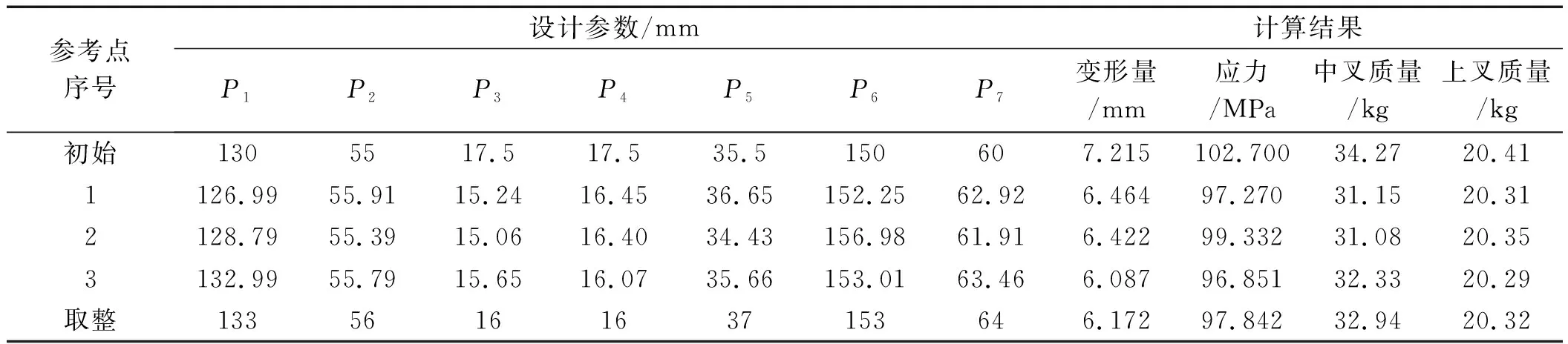
表2 設(shè)計(jì)點(diǎn)計(jì)算結(jié)果
由表2可知:優(yōu)化后的貨叉整體剛度提升了14.5%,貨叉的最大應(yīng)力減小了4.7%,上叉與中叉的總質(zhì)量減小了2.6%。由此可見(jiàn),對(duì)貨叉的參數(shù)進(jìn)行優(yōu)化的效果較為明顯。
5 樣機(jī)試驗(yàn)
筆者對(duì)優(yōu)化后的堆垛機(jī)進(jìn)行裝配,將500 kg配重塊固定在三級(jí)貨叉的末端,貨叉末端撓度為8 mm左右。
堆垛機(jī)裝配現(xiàn)場(chǎng)如圖15所示。
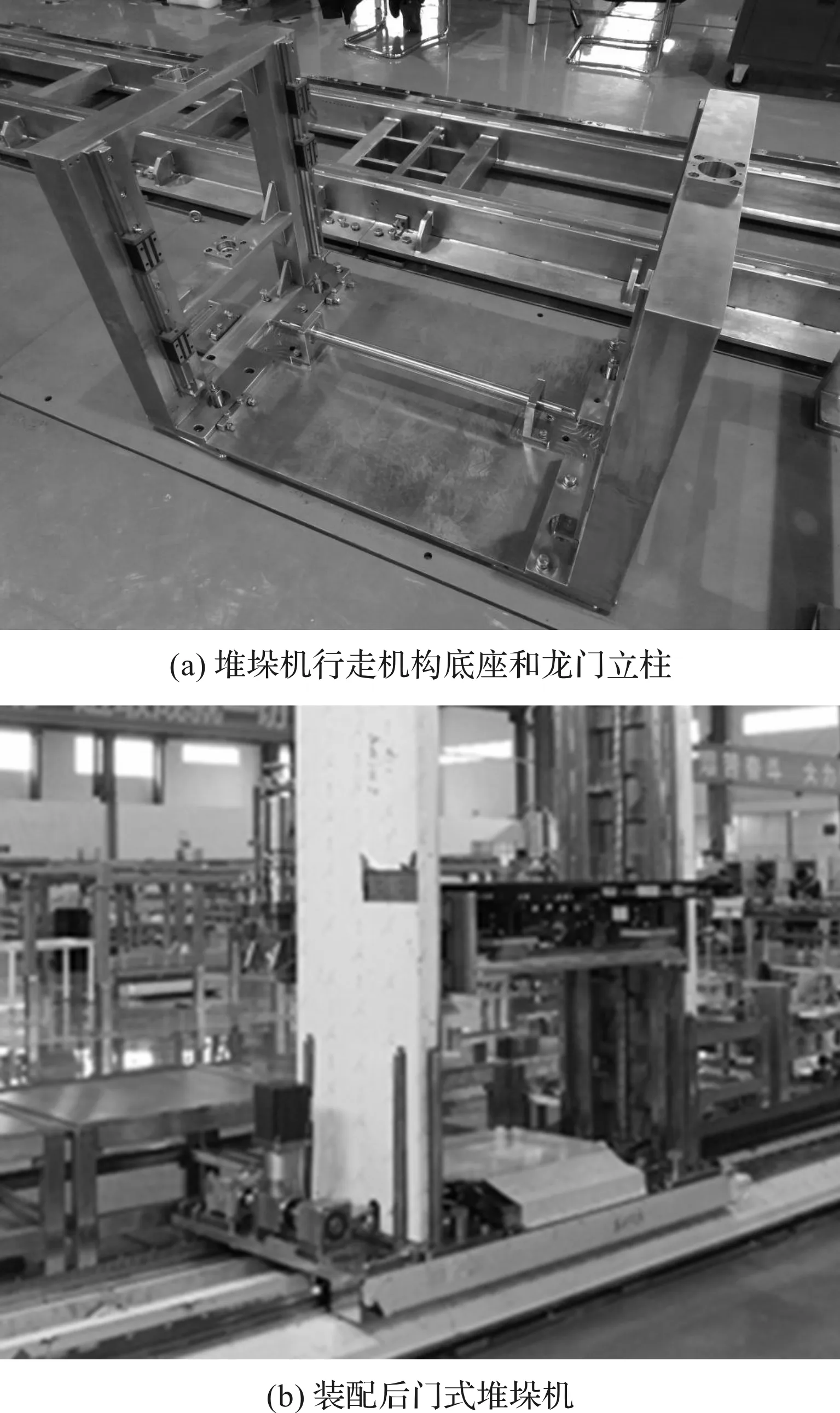
圖15 堆垛機(jī)裝配現(xiàn)場(chǎng)
設(shè)備開(kāi)機(jī)并運(yùn)行一段時(shí)間,可以觀察到設(shè)備運(yùn)行較為平穩(wěn),可以滿足重載貨物的搬運(yùn)要求。
6 結(jié)束語(yǔ)
為解決堆垛機(jī)的多級(jí)貨叉在叉取貨物時(shí)易產(chǎn)生較大變形的問(wèn)題,圍繞雙立柱式堆垛機(jī)三級(jí)貨叉剛度建模與優(yōu)化展開(kāi)研究,旨在為多級(jí)貨叉的設(shè)計(jì)提供更好的理論指導(dǎo)。
筆者首先提出了一種堆垛機(jī)的整體結(jié)構(gòu)與工作原理,分析了貨叉組件的結(jié)構(gòu)與多級(jí)直線差動(dòng)式貨叉的工作原理;其次建立了貨叉組件的力學(xué)模型,并求解了貨叉在多組載荷下的撓度值;然后,建立了貨叉組件的有限元模型,求解出了貨叉組件的剛度并與理論計(jì)算結(jié)果對(duì)比,驗(yàn)證了理論計(jì)算的準(zhǔn)確性;最后,對(duì)貨叉組件進(jìn)行了參數(shù)優(yōu)化,完成了優(yōu)化后貨叉組件的靜力學(xué)有限元分析。
主要研究成果如下:
(1)設(shè)計(jì)了一種門式堆垛機(jī),并基于力學(xué)理論,建立了多級(jí)貨叉的力學(xué)模型,給出了各支點(diǎn)受力的計(jì)算方法;采用材料力學(xué)以及疊加原理建立了多級(jí)貨叉的剛度模型,并對(duì)5組載荷下的三級(jí)貨叉撓度進(jìn)行了求解;
(2)對(duì)三級(jí)貨叉組件進(jìn)行了結(jié)構(gòu)靜力學(xué)分析,得到了貨叉組件的變形量與應(yīng)力大小,驗(yàn)證了貨叉剛度建模理論的可靠性以及貨叉結(jié)構(gòu)設(shè)計(jì)的安全性;
(3)采用多目標(biāo)優(yōu)化方法對(duì)貨叉截面進(jìn)行了參數(shù)優(yōu)化,選擇最優(yōu)截面參數(shù)并進(jìn)行了計(jì)算,得到了優(yōu)化后的貨叉組件:整體剛度提升了14.5%,貨叉的最大應(yīng)力減小了4.7%,上叉與中叉的總質(zhì)量減小了2.6%。
在后續(xù)的研究中,筆者將要建立堆垛機(jī)主體與貨叉組件的耦合模型,以及堆垛機(jī)不同運(yùn)行狀態(tài)下的動(dòng)力學(xué)模型,以便進(jìn)一步提高貨叉末端的精度。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
上海節(jié)能(2020年3期)2020-04-13 13:16:16
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:00
天津醫(yī)科大學(xué)學(xué)報(bào)(2019年6期)2019-08-13 07:04:32
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
機(jī)械工程師(2015年10期)2015-02-02 01:14:03