基于Fluent的空氣監(jiān)測裝置內(nèi)流場仿真研究
2023-02-13 09:27:36任凱軒邱好奇謝炳楠
化工自動化及儀表 2023年1期
任凱軒 王 震 邱好奇 謝炳楠
(河南晟合軒智能科技有限公司)
隨著我國城市的不斷發(fā)展,城市內(nèi)的居民生活、 工業(yè)生產(chǎn)及交通尾氣等污染源與日俱增,影響人的健康[1,2]。人類向自然界排放的空氣污染物已經(jīng)超過了自然環(huán)境的自愈能力。 城市空氣污染問題日益得到重視,目前已經(jīng)建立了全國空氣質(zhì)量指數(shù)發(fā)布平臺, 實(shí)時發(fā)布各個城市的空氣質(zhì)量。 這就對空氣質(zhì)量監(jiān)測技術(shù)和空氣監(jiān)測點(diǎn)位布置提出了更高的要求。
我國政府為推動生態(tài)環(huán)境改善工作,以監(jiān)測先行、監(jiān)測靈敏、監(jiān)測準(zhǔn)確為導(dǎo)向,推出新舉措,認(rèn)真完成全國生態(tài)環(huán)境監(jiān)測各項(xiàng)任務(wù),加快建立完善現(xiàn)代化生態(tài)環(huán)境監(jiān)測體系,深入打好污染防治攻堅(jiān)戰(zhàn)。 但與此同時對監(jiān)測數(shù)據(jù)弄虛作假、監(jiān)測站點(diǎn)人為干擾環(huán)境質(zhì)量監(jiān)測站點(diǎn)等問題時有發(fā)生。
為強(qiáng)化環(huán)境質(zhì)量監(jiān)測站點(diǎn)保障工作,確保生態(tài)環(huán)境監(jiān)測數(shù)據(jù)真實(shí)、準(zhǔn)確,計(jì)劃設(shè)置空氣監(jiān)測流動站。 空氣監(jiān)測流動站可作為代替站,或當(dāng)發(fā)現(xiàn)固定站不合理時,作為靈活的增設(shè)站,發(fā)生緊急污染時,作為機(jī)動的臨時站,在設(shè)置固定站前,它還可協(xié)助污染普查。
目前根據(jù)《環(huán)境空氣質(zhì)量監(jiān)測點(diǎn)位布設(shè)技術(shù)規(guī)范》的要求,城市環(huán)境空氣質(zhì)量監(jiān)測點(diǎn)可分為:城市點(diǎn)、區(qū)域點(diǎn)、背景點(diǎn)、污染監(jiān)控點(diǎn)和路邊交通點(diǎn)5 類,這5 類均為固定點(diǎn)。 近些年隨著共享單車的普及,筆者設(shè)計(jì)了一款可安裝于共享單車上的空氣監(jiān)測裝置,在共享單車處于騎行狀態(tài)下進(jìn)行空氣采集監(jiān)測。 由于其為流動采集數(shù)據(jù),可作為固定點(diǎn)采集數(shù)據(jù)的強(qiáng)力補(bǔ)充,能較好地反映城市空氣質(zhì)量[3]。
1 設(shè)計(jì)方案
1.1 設(shè)計(jì)說明
筆者設(shè)計(jì)的空氣監(jiān)測裝置安裝于共享單車前車筐的底部,當(dāng)共享單車處于騎行狀態(tài)時可進(jìn)行空氣監(jiān)測。 由于監(jiān)測過程為在路面上的流動監(jiān)測,而非在某一固定點(diǎn)進(jìn)行,因此其數(shù)據(jù)更有代表性。 且共享單車分布于城市各個角落,不易受人為因素干擾,其所采集的數(shù)據(jù)可靠性更高。
空氣監(jiān)測裝置的安裝如圖1 所示。 首先,將監(jiān)測裝置本體通過支架固定于共享單車車筐底部,其安裝方式主要為上部固定的吊裝。 通過調(diào)整安裝位置,使空氣監(jiān)測裝置的前進(jìn)氣口、后排氣口不受遮擋,方便前后方向的空氣流通,減少監(jiān)測過程中可能存在的干擾,優(yōu)化氣流場。 本裝置與車筐的連接采用固定鈑金件和異形螺栓,具有一定防拆功能,保護(hù)其不被人為破壞。
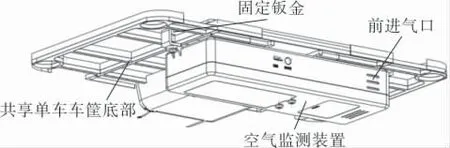
圖1 空氣監(jiān)測裝置安裝示意圖
監(jiān)測裝置內(nèi)的核心設(shè)備為空氣監(jiān)測傳感器(圖2), 傳感器內(nèi)置有風(fēng)扇安裝于傳感器的排氣口進(jìn)行抽風(fēng)。 傳感器安裝使用時要求避免周圍有氣流干擾,其技術(shù)要求外部氣流方向與傳感器內(nèi)部氣流方向保持垂直。
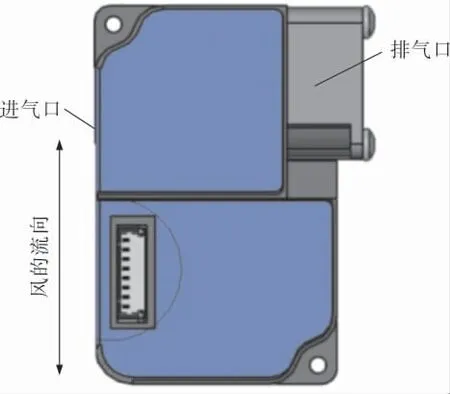
圖2 空氣監(jiān)測傳感器示意圖
根據(jù)傳感器對空氣流向的技術(shù)要求,設(shè)計(jì)的裝置內(nèi)部布局如圖3 所示。 采集腔體做了氣體流動處理,空氣在自行車前進(jìn)的推力下,由進(jìn)氣口進(jìn)入氣體監(jiān)測腔體,在腔體內(nèi)進(jìn)行垂直于傳感器進(jìn)氣口的流動,當(dāng)傳感器開始工作后,即可抽取腔體內(nèi)流動的氣體進(jìn)行采樣分析,這樣提取的空氣質(zhì)量更具代表性。 外殼的進(jìn)氣口、排氣口都做了45°傾角的防雨水、防灰塵措施,減少其他的環(huán)境干擾,極大地保證了監(jiān)測數(shù)據(jù)的準(zhǔn)確性。
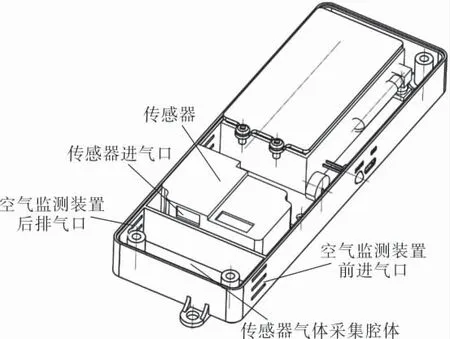
圖3 空氣監(jiān)測裝置內(nèi)部布局圖
1.2 內(nèi)流場建模
為確定空氣監(jiān)測裝置內(nèi)部流體分布均勻,符合要求,應(yīng)對腔體內(nèi)部流場進(jìn)行仿真計(jì)算。 根據(jù)空氣監(jiān)測裝置的設(shè)計(jì)方案建立空氣流場模型,為后期做流體仿真分析做準(zhǔn)備。 簡化后的流場仿真模型如圖4 所示。
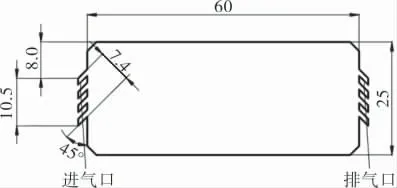
圖4 簡化后的流場模型
由圖4 可以清晰地看出,進(jìn)氣口與排氣口都有45°傾角,進(jìn)氣口、排氣口的厚度為1.5 mm,間隔也是1.5 mm,初步設(shè)計(jì)進(jìn)氣口、排氣口分別為4 排。
2 內(nèi)流場仿真
2.1 內(nèi)流場網(wǎng)格劃分
內(nèi)流場模型建好后, 將其導(dǎo)入ANSYS 中進(jìn)行網(wǎng)格劃分,由于模型進(jìn)氣口、排氣口最小尺寸為1.5 mm,所以設(shè)置網(wǎng)格的最小尺寸為0.5 mm,且單元格為六面體。 劃分好的網(wǎng)格如圖5 所示。

圖5 內(nèi)流場網(wǎng)格劃分
2.2 內(nèi)流場初步仿真結(jié)果
將劃分的網(wǎng)格導(dǎo)入Fluent 中進(jìn)行流體力學(xué)仿真,定義材料、邊界條件等參數(shù)。 查找數(shù)據(jù)可知: 共享單車騎行的速度一般為10~20 km/h,在城市道路騎行速度超過20 km/h 的情況很少。 而流場內(nèi)的流速越高,流場越不容易達(dá)到層流狀態(tài), 如果流場在流速達(dá)到20 km/h 時保持為層流狀態(tài), 則當(dāng)速度低于20 km/h 時流場必然為層流狀態(tài)。 所以本次仿真以入口速度為5.4 m/s 進(jìn)行計(jì)算。仿真后得到的速度云圖如圖6 所示。
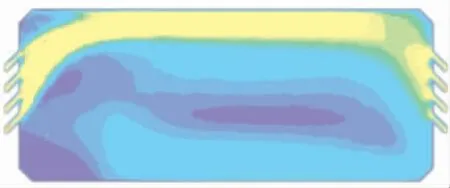
圖6 流場速度仿真云圖
從圖6 可以看到, 腔體的上部流速較高,下部流速較低, 整個腔體內(nèi)氣體分布差別較大,層流與紊流交雜,不能夠?yàn)閭鞲衅鞑杉峁┮粋€穩(wěn)定的流場。 初步判斷這與流體進(jìn)氣口的位置有關(guān),調(diào)整進(jìn)氣口位置,將進(jìn)氣口向下移動,查看仿真結(jié)果是否分布更加均勻[4,5]。
進(jìn)氣口下移后流場速度仿真云圖如圖7 所示,可以看出進(jìn)氣口下移對于流場內(nèi)氣體的均勻分布有一定作用,但是流場內(nèi)氣體上下差別還是較大。 通過改變進(jìn)氣口、出氣口的位置,改善效果依然不大,不能達(dá)到預(yù)期的層流狀態(tài)[6]。

圖7 調(diào)整進(jìn)氣口位置后的流場速度仿真云圖
2.3 內(nèi)流場改進(jìn)優(yōu)化
流體狀態(tài)可分為層流和紊流兩種狀態(tài)。 層流是指流體在運(yùn)動過程中,各質(zhì)點(diǎn)完全沿著管軸方向直線運(yùn)動,質(zhì)點(diǎn)之間互不摻混、互不干擾。 若運(yùn)動著的質(zhì)點(diǎn)不僅沿著管軸方向直線運(yùn)動,還伴有橫向擾動,質(zhì)點(diǎn)之間彼此混雜,流線雜亂無章,這樣的流動狀態(tài)稱為紊流。
本項(xiàng)目所設(shè)計(jì)流場在紊流狀態(tài)下分子間擾動強(qiáng)烈,不利于空氣質(zhì)量監(jiān)測的準(zhǔn)確性,所以需要調(diào)整流場設(shè)計(jì), 使其達(dá)到穩(wěn)定運(yùn)行的層流狀態(tài)。 而判斷流場是處于層流還是紊流狀態(tài)需要用到雷諾數(shù)(Re)的概念,雷諾數(shù)物理上表示慣性力和粘性力量級的比。 雷諾數(shù)較小時,粘滯力對流場的影響大于慣性,流場中流速的擾動會因粘滯力而衰減,流體流動穩(wěn)定,為層流;反之,雷諾數(shù)較大時,慣性對流場的影響大于粘滯力,流體流動較不穩(wěn)定,流速的微小變化容易發(fā)展、增強(qiáng),形成紊亂、不規(guī)則的紊流流場。 雷諾數(shù)計(jì)算公式如下[7,8]:

式中 L——流場的當(dāng)量長度;
v——流場的特征速度;
ρ——流體密度;
μ——動力粘性系數(shù)。
當(dāng)流場流通截面為圓形時L為圓形的直徑,當(dāng)流場流通截面為矩形時L=ab/(a+b),a、b為矩形截面的兩個邊長[9,10]。
利用雷諾數(shù)可判定流體的流動是層流還是紊流。雷諾數(shù)小于2 300 的流動是層流,雷諾數(shù)在2 300~4 000 之間時為過渡狀態(tài), 雷諾數(shù)大于4 000時是紊流[11,12]。
本項(xiàng)目的研究對象需要流場內(nèi)形成層流狀態(tài),也就是需要流場內(nèi)的最大雷諾數(shù)小于2 300。通過式(1)可以得到當(dāng)量長度L 的數(shù)值。 各仿真參數(shù)值如下:
ρ 1.29 kg/m3
μ 1.79×10-5Pa·s
v 5.4 m/s
Re 2 300
L 5.9 mm
經(jīng)過計(jì)算,當(dāng)流場當(dāng)量長度小于5.9 mm 時,該流場的內(nèi)部雷諾數(shù)也小于2 300, 滿足層流的判定條件。 設(shè)計(jì)流場截面矩形的兩個邊長為5、50 mm 時,其當(dāng)量長度為4.54 mm,計(jì)算雷諾數(shù)為1 769,滿足設(shè)計(jì)層流需求。
根據(jù)計(jì)算所得尺寸數(shù)據(jù)重新設(shè)計(jì)該內(nèi)流場的空間布局; 調(diào)整進(jìn)氣口與排氣口的位置和尺寸,進(jìn)氣口由原來的4 片增加至6 片。 與此同時,為使腔體內(nèi)上部氣體與下部氣體也均勻分布,在腔體內(nèi)增設(shè)導(dǎo)流板, 用以引導(dǎo)氣體的流向和分布。 流場內(nèi)的尖角理論上用圓角替代較為合適,但考慮尖角變圓角對流場影響有限,且圓角加工成本較高,所以最終保持尖角。 優(yōu)化后的流場模型如圖8 所示。
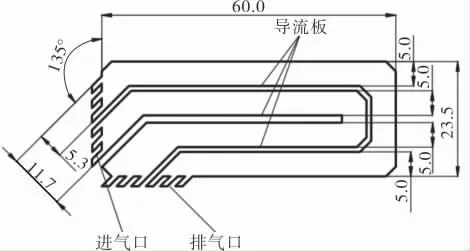
圖8 優(yōu)化后的流場模型
2.4 優(yōu)化后的模型仿真
Fluent 仿真保持流場的參數(shù)設(shè)置不變。 對其進(jìn)行仿真分析運(yùn)算, 運(yùn)行后得到的結(jié)果如圖9所示。

圖9 優(yōu)化后的流場速度仿真云圖
通過速度云圖可以看到,氣體流場的平均速度約為5 m/s,部分速度較高的區(qū)域約為7.5 m/s,速度較低區(qū)域?yàn)? m/s,上下偏差不超過50%,速度分布較為均勻。
優(yōu)化后的流場壓力仿真云圖如圖10 所示。可以看到, 氣體流場的平均壓力約為120 Pa,其中上部壓力較高的區(qū)域約為170 Pa,下部壓力較低的區(qū)域約為60 Pa,上下壓力差不大,分布較為均勻。 這就表示流場內(nèi)部流體分布較為均勻,滿足傳感器采集的需求。

圖10 優(yōu)化后的流場壓力仿真云圖
2.5 內(nèi)腔體最終模型
根據(jù)仿真結(jié)果設(shè)計(jì)流場內(nèi)部結(jié)構(gòu),設(shè)計(jì)好的流場內(nèi)部結(jié)構(gòu)剖面如圖11 所示, 通過增加導(dǎo)流板,調(diào)整當(dāng)量尺寸,使得流場內(nèi)部達(dá)到層流狀態(tài)。
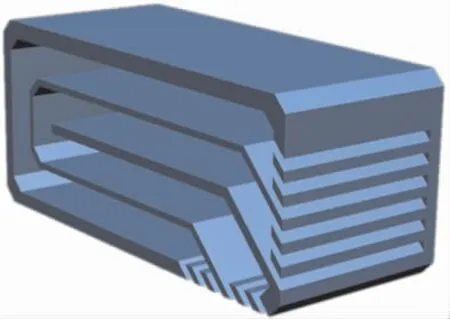
圖11 流場結(jié)構(gòu)剖面圖
3 結(jié)束語
將雷諾數(shù)作為判定層流、紊流的特征值,結(jié)合流體仿真技術(shù)設(shè)計(jì)的空氣監(jiān)測裝置內(nèi)流場符合實(shí)際需求, 即空氣傳感器采集的氣體流場應(yīng)為穩(wěn)定的層流狀態(tài),采集數(shù)據(jù)才準(zhǔn)確可靠。通過調(diào)整進(jìn)氣口、排氣口位置,增加進(jìn)氣空間,在腔體內(nèi)增加導(dǎo)流板等措施使得腔體內(nèi)的氣體分布更加均勻。
