兩級星型齒輪傳動系統低振動齒廓修形設計研究
2023-02-18 08:36:00張雪強趙書樊郭麗君侯祥穎李政民卿
機械工程師 2023年1期
張雪強, 趙書樊, 郭麗君, 侯祥穎, 李政民卿
(1.中國航空工業集團公司金城南京機電液壓工程研究中心,南京 211106;2.航空機電系統綜合航空科技重點實驗室,南京 211106;3.南京航空航天大學機電學院,南京 210016)
0 引言
齒輪傳動因其在高速重載下的振動和沖擊極為明顯,因而齒輪系統振動性能優化成為諸多學者關注的問題。齒廓修形是指通過對齒廓曲線的微量切削,降低嚙合沖擊,減少由于變形或誤差等因素引起的嚙合偏差,提升傳動質量與性能,成為目前最有效的抑振手段之一,也受到學者的廣泛關注。
C. J. Bahk等[1]建立了行星齒輪傳動系統動力學分析模型,利用攝動法研究了齒廓修形參數對系統振動特性的影響,并以動態傳遞誤差波動量最小為目標確定了系統齒廓修形參數;M. Chapron等[2]以行星傳動系統為對象,基于系統動力學分析模型和遺傳優化算法,以降低動態嚙合力為目標,得到了系統的優化修形參數。吳勇軍等[3]根據斜齒輪沿嚙合線方向的變形量,確定了斜齒輪副的齒廓修形參數,并研制了相應的試驗件,開展了傳動系統的振動對比試驗,試驗結果如圖1所示;湯魚等[4]以行星齒輪系統傳動誤差波動量最小為目標,確定了行星齒輪傳動系統中各齒輪副的修形參數,并對修形與未修形齒輪副開展了動力學分析與試驗研究,驗證了修形方法的有效性;王成等[5]建立了單級齒輪傳動系統非線性動力學模型,形成了考慮齒廓修形參數的嚙合剛度計算方法,并建立了以系統動載系數最小為目標的齒廓修形設計方法;嚴岳勝等[6]針對星形齒輪傳動系統,研究了計入齒廓修形參數的承載傳動誤差的計算方法,并以承載傳動誤差幅值最小為目標,開展了系統齒廓修形優化設計研究。呂世恒等[7]針對星型傳動系統提出了耦合振動邊界條件和動力學分析模型,討論了支撐剛度變化對系統振動的影響規律。
從上述文獻可知,國內外學者在齒廓修形原理、加工方式、齒輪副齒廓修形設計方法等方面已開展了大量研究。但目前針對兩級星型齒輪傳動系統的齒廓修形設計方法研究較少,在實際應用中缺乏理論支撐;因此,需要針對兩級星型齒輪傳動系統開展齒廓修形設計方法研究。
1 兩級星型齒輪傳動系統齒廓修形設計方法
1.1 考慮齒廓修形的兩級星型齒輪傳動系統動力學模型
兩級星型齒輪傳動系統結構如圖1(a)、圖1(b)所示,太陽輪為輸入級,星型輪2與太陽輪嚙合,星型輪3與星型輪2為雙聯齒輪,并與內齒圈嚙合,內齒圈為輸出級。基于齒輪系統構型和動力學分析基本理論可以建立兩級星型齒輪系統動力學模型,如圖1(c)所示。

圖1 兩級星型齒輪結構示意圖及動力學建模
根據齒廓修形原理,將主、從動輪齒廓修形量考慮到嚙合線方向的相對位移中,易得嚙合線方向位移為

式中:rp、rg分別為主、從動輪基圓半徑;θp、θg、lp1、lp2、lg1、lg2分別為主動輪扭轉角位移、從動輪扭轉角位移、主動輪兩端軸承節點處x方向振動位移、主動輪兩端軸承節點處y方向振動位移、從動輪兩端軸承節點處x方向振動位移、從動輪兩端軸承節點處y方向振動位移;l1、l2分別為齒輪到兩軸承支點的距離;e為齒輪副的準靜態傳遞誤差;Δp、Δg分別為主、從動齒輪在嚙合點處對應的修形量。
根據式(1)將齒廓修形量與齒輪副的準靜態傳遞誤差相互組合,兩級星型齒輪傳動系統考慮齒廓修形參數的的準靜態傳遞誤差為:

式中:Δ1、Δ4分別為太陽輪與內齒圈在嚙合點處對應的修形量;Δ2i、Δ3i分別為第i支路星型輪2與星型輪3在嚙合點處對應的修形量;下標i表示不同支路(i=1,2,3)。根據兩級星型齒輪傳動系統嚙合位置關系(如圖1(c)所示),獲得嚙合線方向的位移為:

式中:xMn1-2i、xMn4-3i分別為外齒輪副、內齒輪副嚙合線方向位移;MSTE1-2i、MSTE4-3i分別為外齒輪副、內齒輪副準靜態傳遞誤差;下標i表示不同支路(i=1,2,3)。容易得到考慮齒廓修形的兩級星型齒輪傳動系統動力學模型:

式中:m1、m2i、m3i、m4分別為太陽輪、星型輪2、星型輪3與內齒圈的質量;I1、I2i、I3i、I4分別為太陽輪、星型輪2、星型輪3與內齒圈的轉動慣量;T1、T2分別為太陽輪和內齒圈的轉矩;c1-2i、c4-3i分別為外齒輪副、內齒輪副間的嚙合阻尼;k1-2i、k4-3i分別為外齒輪副、內齒輪副間的嚙合剛度;ki、ci分別為雙聯齒輪當量扭轉剛度、當量扭轉阻尼;FMd1-2i、FMd4-3i分別為外齒輪副、內齒輪副動態嚙合力;下標i與前文意義相同,αw、αN分別為外齒輪副、內齒輪副嚙合角。
1.2 兩級星型齒輪傳動系統低振動齒廓修形設計分析方法
兩級星型齒輪傳動系統主要由太陽輪、多個雙聯星輪及內齒圈等多種零部件組成,其中太陽輪與星型輪2構成外嚙合副,星型輪3與內齒圈構成內嚙合副,而齒廓修形主要針對一對齒輪副。因此,需要針對兩級星型齒輪傳動系統中內、外嚙合副分別開展齒廓修形設計分析。基于圓柱齒輪副齒廓修形設計分析方法,針對兩級星型齒輪系統,建立了考慮齒廓修形的傳動系統級數學模型。
眾所周知齒廓修形有最大修形量、修形長度和修形曲線三要素。其中修形曲線可表示為包含3個系數的函數,共需要用5個參數表示一個齒輪的修形參數,而3支路的兩級星型齒輪傳動系統共存在8個齒輪,如若將所有齒輪的修形參數均列為設計變量,將大大增加問題的復雜度。為簡化設計過程,本文認為同級齒輪副修形參數一致;并且考慮內齒圈齒廓修形加工難度以及工況等因素,僅選擇內、外齒輪副的主動輪(太陽輪、星型輪3)進行修形設計,而星型輪2與內齒圈則不作修形處理。因此,兩級星型齒輪傳動系統齒廓修形設計的設計變量為

式中:Δmax1、Δmax3分別為太陽輪與星型輪3的最大修形量;L1、L3分別為太陽輪與星型輪3的修形長度;a1、b1、c1與a3、b3、c3分別為太陽輪與星型輪3修形曲線的相關系數。
本文所建立的齒廓修形設計分析方法主要針對原有的兩級星型齒輪傳動系統,忽略齒輪系統設計過程中的干涉約束、齒數選擇約束等,僅考慮齒廓修形參數相關的約束。為此,本文定義了兩級星型齒輪傳動系統齒廓修形設計的約束條件,最大修形量的邊界約束:1)Δsetmin≤Δmax≤Δsetmax。Δmax為最大修形量;Δsetmin、Δsetmax分別為最大修形量自定的邊界值。2)保證修形長度應不大于雙齒嚙合區長度的修形長度的邊界約束,即Lsetmin≤L≤Lsetmax。L為修形長度;Lsetmin、Lsetmax分別為修形長度自定的邊界值,其中Lsetmax不大于雙齒嚙合區長度。3)齒輪副的彎曲疲勞強度與接觸疲勞強度約束為SF≥[SF],SH≥[SH]。SF、SH分別為齒輪副的彎曲、接觸疲勞安全系數;[SF]、[SH]分別為齒輪副的彎曲、接觸疲勞的許用安全系數。
兩級星型齒輪傳動系統由于受到制造誤差、安裝誤差、構件的彈性變形等因素的影響,存在各支路間載荷分配不均勻的現象。因此,同級齒輪副不同支路間動態嚙合力的齒頻幅值存在一定差異;為簡化兩級星型齒輪傳動系統修形設計過程,本文以同級齒輪副中各支路動態嚙合力齒頻幅值的最大值,表示該級齒輪副動態嚙合力的齒頻幅值,即

式中:AF為同級齒輪副動態嚙合力的齒頻幅值;Ai(i=1,2,…,n)為第i支路同級齒輪副齒頻幅值。
為同時保證內外兩級齒輪副的振動抑制效果,結合圓柱齒輪副中以動態嚙合力嚙合齒頻幅值最小為目標的設計方法,建立如下目標函數:

式中,AFW、AFN分別為外、內齒輪副動態嚙合力的齒頻幅值。
由上述分析可知,兩級星型齒輪傳動系統齒廓修形設計是一個雙目標的設計問題,理論上期望兩個目標函數都達到最優,但實際分析過程中,兩個目標函數往往無法同時達到最優。因此,雙目標的設計問題關鍵是尋找到能接受的非劣解[8]。為此,本文采用設計變量聯合變化的方式,分別計算兩級星型齒輪傳動系統內外齒輪副的齒頻幅值,通過與未修形的分析結果對比,尋找齒廓修形參數的非劣解,最終從非劣解集合中尋找較好的非劣解。基于上述分析思路,形成了兩級星型齒輪傳動系統齒廓修形設計分析流程,如圖2所示。

圖2 兩級星型齒輪傳動系統齒廓修形設計分析流程
2 齒廓修形參數對兩級星型齒輪系統動態性能影響規律分析
2.1 系統動態嚙合力齒頻幅值規律
1)外齒輪副直線修形對系統動態力齒頻幅值的影響規律。
本次分析采用外齒輪副直線修形,內齒輪副不修形的修形方案,并選取最大修形量與修形長度聯動變化,開展系統動態嚙合力分析。根據外齒輪副受載情況以及修形長度選取的相關經驗[9],本文選取外齒輪副最大修形量范圍為[0,20 μm],修形長度占比范圍為[0.5,1]。其中,系統內、外齒輪副動態嚙合力齒頻幅值的變化規律如圖3所示。

圖3 外齒輪副直線修形對系統動態力齒頻幅值的影響
由圖3可知,在大部分修形參數下,系統內外齒輪副動態嚙合力的齒頻幅值均有不同程度的下降,相比于內齒輪副,對外齒輪副動態嚙合力齒頻幅值的抑制作用更為明顯;當修形長度保持不變時,隨著最大修形量的增加,外齒輪副動態嚙合力最大齒頻幅值出現先減小、后增大的現象,而內齒輪副動態嚙合力最大齒頻幅值變化不大。
2)外齒輪副拋物線修形對系統動態嚙合力的影響規律。
本次分析選擇外齒輪副拋物線修形,內齒輪副不修形的修形方案,并保證其余參數分析范圍不變;利用前述分析方法,開展系統動態行為分析,獲得系統內、外齒輪副動態嚙合力齒頻幅值的變化規律,如圖4所示。

圖4 外齒輪副拋物線修形對系統動態力齒頻幅值的影響
對比外齒輪副直線修形對系統動態力的影響規律,結合圖3可知,修形曲線的改變,對系統動態嚙合力齒頻幅值的變化趨勢影響不大,主要影響了最大修形量、修形長度及最大齒頻幅值的具體數值;相比于直線修形分析結果,在當前設計參數下,外齒輪副選取拋物線修形對系統動態嚙合力齒頻幅值的抑制作用更佳。
3)內齒輪副直線修形對系統動態嚙合力的影響規律。
本次分析采用內齒輪副直線修形,外齒輪副不修形的修形方案,并選取最大修形量與修形長度聯動變化。由于內齒輪副受載情況比外齒輪副更大,其最大修形量分析范圍應大于外齒輪副。因此,本文選取內齒輪副最大修形量范圍為[0,40 μm],修形長度占比范圍為[0.5,1]。利用前述分析方法,開展系統動態行為分析,獲得系統內、外齒輪副動態嚙合力齒頻幅值的變化規律,如圖5所示。
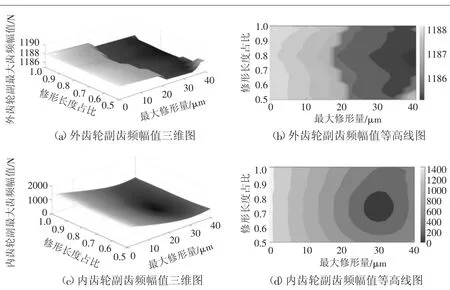
圖5 內齒輪副直線修形對系統動態力齒頻幅值的影響
由圖5可知,內齒輪副修形對內齒輪副動態嚙合力最大齒頻幅值影響作用大于外齒輪副;當修形長度不變時,隨著最大修形量的增加,內齒輪副動態嚙合力最大齒頻幅值出現先減小、后增大的變化趨勢,而外齒輪副動態嚙合力最大齒頻幅值主要在1186~1188 N之間波動;并且在當前范圍內,內齒輪副動態嚙合力最大齒頻幅值存在最小值點。
4)內齒輪副拋物線修形對系統動態嚙合力的影響規律。
本次分析選擇內齒輪副拋物線修形、外齒輪副不修形的修形方案,并保證其余參數分析范圍不變;利用前述分析方法,開展系統動態行為分析,獲得系統內、外齒輪副動態嚙合力齒頻幅值的變化規律,如圖6所示。

圖6 內齒輪副拋物線修形對系統動態力齒頻幅值的影響
對比內齒輪副直線修形對系統動態力的影響規律,結合圖5可知,修形曲線的改變對外齒輪副動態嚙合力齒頻幅值的變化趨勢影響不大,但內齒輪副的最小值點正逐步移動到修形長度與最大修形量更大的區域。對比兩種修形曲線的分析結果可知,在當前設計參數下,內齒輪副選取直線修形對系統動態嚙合力齒頻幅值的抑制作用更佳。
由上述分析可知,在兩級星型齒輪傳動系統中,對任一級齒輪副采取合理的齒廓修形參數,均可減小系統內外齒輪副動態嚙合力齒頻幅值,并且對該級齒輪副動態嚙合力齒頻幅值的抑制作用更加明顯。因此,在初選內外齒輪副齒廓修形參數范圍時,可僅考慮修形參數對修形齒輪副動態嚙合力齒頻幅值的影響。為此,針對本次設計參數,給出如下修形方案:
1)針對外齒輪副,采用太陽輪齒頂修形、星型輪2不修形的修形方式,其中最大修形量的取值范圍為[10,20 μm],修形長度占比的取值范圍為[0.5,0.7],修形曲線為拋物線;
2)針對內齒輪副,采用星型輪3齒頂修形、內齒圈不修形的修形方式,其中最大修形量的取值范圍為[25,35 μm],修形長度的取值范圍為[0.6,0.8],修形曲線為直線。
針對上述修形參數,分別選取太陽輪與星型輪3的最大修形量以及修形長度聯動變化,基于前文建立的系統級動力學分析模型開展動態分析,獲取系統齒廓修形參數的非劣解,如圖7所示。

圖7 齒廓修形參數非劣解集合
根據上述分析結果,本文選取離原點最近的非劣解作為當前工況下的最佳修形參數,如表1所示。

表1 兩級星型齒輪傳動系統不同修形參數匯總表
基于上述齒廓修形參數,利用前述分析方法,開展修形齒輪系統的動態行為分析,并與未修形齒輪系統進行對比。其中,動態嚙合力對比結果如圖8所示,圖中fW表示

圖8 齒輪副動態嚙合力頻域對比圖
2.2 兩級星型齒輪傳動系統齒廓修形設計與響應分析
外齒輪副的嚙合齒頻,fN表示內齒輪副嚙合齒頻;星型輪橫向振動位移對比結果如圖9所示。

圖9 星型輪橫向振動位移對比圖
由上述分析結果可知,齒廓修形有效地抑制了內外齒輪副動態嚙合力頻域幅值,且對齒頻處幅值抑制作用最為明顯。基于系統動態嚙合力,利用前文中動載系數計算方法,可獲得未修形齒輪系統外齒輪副動載系數為3.82,內齒輪副動載系數為2.78;而修形齒輪系統外齒輪副動載系數為2.67,內齒輪副動載系數為1.76。對比未修形齒輪系統的動載系數可知,外齒輪副動載系數比未修形齒輪系統下降30.1%,內齒輪副動載系數比未修形齒輪系統下降36.7%;此外,齒廓修形后星型輪的橫向振動位移幅值出現了明顯的下降。因此,合理的修形參數可以有效地抑制系統動態嚙合力,減小系統振動,改善傳動性能,且本文所建立的兩級星型齒輪傳動系統齒廓修形設計方法,可為兩級星型齒輪傳動系統齒廓修形設計提供理論參考。
3 結語
本文主要針對兩級星型傳動系統齒廓修形設計方法開展研究,建立了考慮齒廓修形參數的兩級星型齒輪傳動系統動力學模型,形成了兩級星型齒輪傳動系統低振動齒廓修形設計方法,開展修形參數對系統動態嚙合力齒頻幅值的影響規律研究,在此基礎上完成了兩級星型齒輪傳動系統齒廓修形參數的設計,并對比了未修形與修形齒輪系統的動態響應,驗證了齒廓修形設計方法的可行性,為兩級星型齒輪傳動系統齒廓修形設計提供理論依據。
1)僅選擇外齒輪副修形,并保持修形長度不變的情況下,隨著最大修形量的增加,外齒輪副動態嚙合力齒頻幅值呈現出先減小、后增大的變化趨勢,內齒輪副動態嚙合力齒頻幅值出現持續減小的變化趨勢,但內齒輪副動態嚙合力最大齒頻幅值變化范圍遠小于外齒輪副;而修形曲線的改變,對系統內外齒輪副動態嚙合力齒頻幅值的變化趨勢影響不大,主要影響了最大修形量、修形長度及最大齒頻幅值的具體數值;針對當前設計參數,外齒輪副選取拋物線修形對系統動態嚙合力齒頻幅值的抑制作用更佳。
2)僅選擇內齒輪副修形,并保持修形長度不變的情況下,隨著最大修形量的增加,內齒輪副動態嚙合力齒頻幅值呈現出先減小、后增大的變化趨勢,外齒輪副動態嚙合力齒頻幅值出現波動變化,并且外齒輪副動態嚙合力最大齒頻幅值變化范圍遠小于內齒輪副;當內齒輪副選擇直線修形時,在分析區間內存在內齒輪副動態嚙合力齒頻幅值的最小值點,但改變修形曲線后,內齒輪副齒頻幅值的最小值點正逐步移動到修形長度與最大修形量更大的區域;針對當前設計參數,內齒輪副選取直線修形對系統動態嚙合力齒頻幅值的抑制作用更佳。
3)針對系統任一級齒輪副采取齒廓修形,可同時影響系統兩級齒輪副的動態行為,但對本級齒輪副的影響作用遠大于另一級齒輪副;因此在初步選取設計區域時,可先僅考慮齒廓修形參數對該級齒輪副動態行為的影響;合理的修形參數可以有效地減小系統的振動,抑制齒輪副間的動態嚙合力,降低齒輪副間的動載。
