重載組合列車縱向力劣化分析與運行安全研究
2023-02-24 07:56:02徐明龍李谷李蔚張濤張文璐白付維
鐵道科學與工程學報 2023年1期
徐明龍,李谷,李蔚,張濤,張文璐,白付維
(1. 中國鐵路太原局集團有限公司,山西 太原 030013;2. 中國鐵道科學研究院集團有限公司,北京 100081;3. 中南大學 交通運輸工程學院,湖南 長沙 410075;4. 大秦鐵路股份有限公司 科學技術研究所,山西 太原 030013)
在承擔大宗貨物運輸的鐵路專用線上開行重載列車無疑是提高運輸效率、獲取運營收益的有效舉措,因此重載運輸在全球多個國家得到大力發展。與此同時,涉及列車運行安全的問題也隨之而來,其根源在于長大重載列車縱向力劣化導致的列車運行安全風險增大。為確保重載列車的運行安全,不僅需要優化操縱以減小縱向力,還需加強機車車輛運動過程的抗壓穩定性,進一步提高其承受縱向沖擊的能力。針對重載組合列車縱向力與運行安全問題,國內外相關專家相繼開展了重載組合列車中部機車運行安全性試驗[1]、列車運行穩定性[2-6]、列車重聯控制策略及縱向動力學仿真平臺[7-15]等研究。通過理論分析及實踐,指出長大重載組合列車的控制特點,特別是在運行過程中存在縱向力劣化及變異現象,尤其是中部機車縱向力在工況變化時將發生突變,嚴重時甚至引起渡板變形等問題,危及列車運行安全。美國、澳大利亞和南非等國家重載列車主要采用Locotrol系統+電控空氣制動系統(ECP)施加空氣制動與緩解[16-19],列車前后部制動力的建立與解除同步性較好,且上述國家的鐵路線路海拔落差較小,因此縱向力安全風險較小。但ECP系統具有較高的制造及維護成本。結合我國國情,大秦鐵路2萬t重載組合列車采用Locotrol系統+傳統空氣制動系統+可控列尾裝置,制動和緩解過程中列車前后部車輛制動力同步性差,縱向沖動明顯。特別是空氣制動緩解時,全列只有頭部與中部機車作為風源為列車管充風,車輛隨著壓力波的傳遞逐個緩解,造成縱向力的累計與傳遞,并在列車中部附近達到峰值。列車前阻后涌時會造成超常壓鉤力,而前涌后阻時則造成超常拉鉤力,縱向力劇烈變化的幅度可能會超出機車車輛結構的設計承受能力。加之大秦線海拔落差大,重車線下坡道集中且長度大,同時為保證運量,乘務員需采用循環制動的操縱方法,所以安全風險較為突出。因此,本文通過對重載組合列車在不同工況下的一系列試驗,探究大秦線中部從控機車在循環制動過程中的縱向力劣化機理,提出操縱優化方案,結合縱向動力學仿真模型加以驗證,為優化重載組合列車操縱,保障列車運行安全提供可行方案。
1 大秦線重載運行概況
大秦鐵路全長653 km,重載組合列車往返于山西省湖東站與河北省秦皇島站之間,年運量4億多噸,承擔著全國鐵路煤炭運量的近1/5。其中,湖東至秦皇島方向為重車下坡方向,返程則是空車上坡方向。
大秦線運行的重載組合列車采用“1+1+可控列尾”編組方式,如圖1所示。這種編組模式對于運輸組織非常有利,可在需要時很方便地將前后各1萬t牽引重量分解為2個單元的萬噸列車。但同時,中部從控機車所受縱向力亦有其特殊性,即除了由于自身牽引、電制動或空氣制動所引起的縱向力之外,對其構成更大威脅的是來自于前后各1萬t列車的涌動所造成的縱向力。

圖1 大秦線“1+1+可控列尾”重載組合列車編組方式Fig. 1 Daqin Railway heavy-haul combined trains formation mode of ‘1+1+end-of-train (EOT) device’
大秦線湖東至茶塢方向有2個連續的長大下坡區段。第1坡段持續長度47 km,最大坡度-12‰,平均坡度-8.2‰;第2坡段持續長度50 km,最大坡度-12‰,平均坡度-9.1‰,如圖2和圖3所示。這2處長大下坡區段是大秦線重載運輸最困難的區間,所有經過的列車都須通過實施空電聯合循環制動進行調速,在此過程中,中部從控機車所受縱向力的作用最為復雜,而不同的操縱方式也將影響機車承受縱向力的大小。
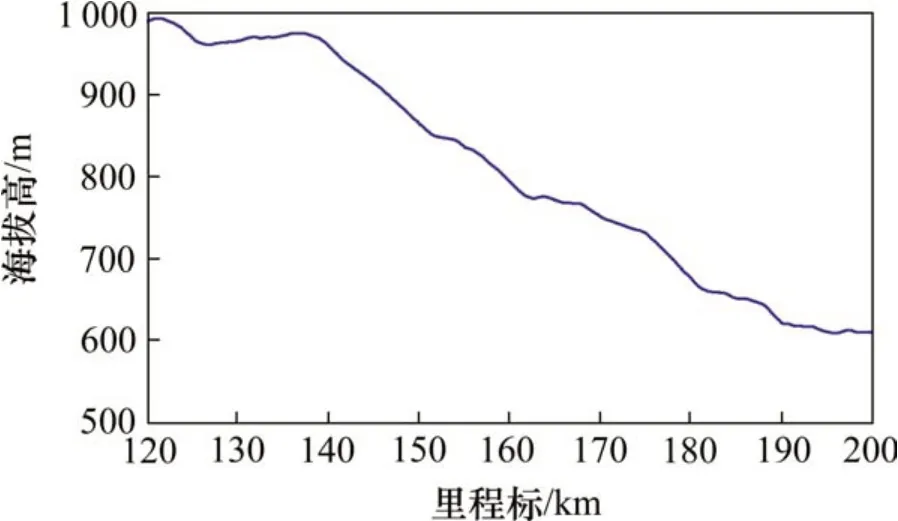
圖2 第1坡段示意圖Fig. 2 Schematic diagram of the first slope

圖3 第2坡段示意圖Fig. 3 Schematic diagram of the second slope
2 中部從控機車縱向力分析
重載組合列車在運行過程中,中部機車的縱向力分析是一個復雜的問題。由于中部機車可以產生牽引和電制動力,其受力狀態與前后車輛均存在差異,特別當工況切換時,這種差異將造成中部機車的縱向力劣化。因此,本節對不同的空氣制動停車工況和循環制動工況下的中部機車受力分別開展了試驗對比分析。試驗列車編組為HXD1+105輛C80貨車+HXD1+105輛C80貨車+可控列尾。采用測力車鉤裝置采集列車運行過程中的車鉤力,測力車鉤安裝在從控機車后鉤位置。
2.1 空氣制動停車工況
空氣制動停車試驗考慮了4種工況,即減壓100 kPa空氣制動停車,從控機車隔離后減壓100 kPa空氣制動停車、常用制動停車和緊急制動停車,且每種工況分別試驗3~4次。上述試驗工況中,實際測得中部從控機車的所受最大縱向壓鉤力絕大多數在1 000 kN以上,其中最大值約為1 915 kN,最小值約為915 kN,均出現在常用全制動停車工況。表1~表4給出了2萬t重載組合列車的中部從控機車在4種典型空氣制動停車試驗工況下的受力情況。

表1 減壓100 kPa空氣制動停車工況Table 1 Process from 100kPa service braking to stop
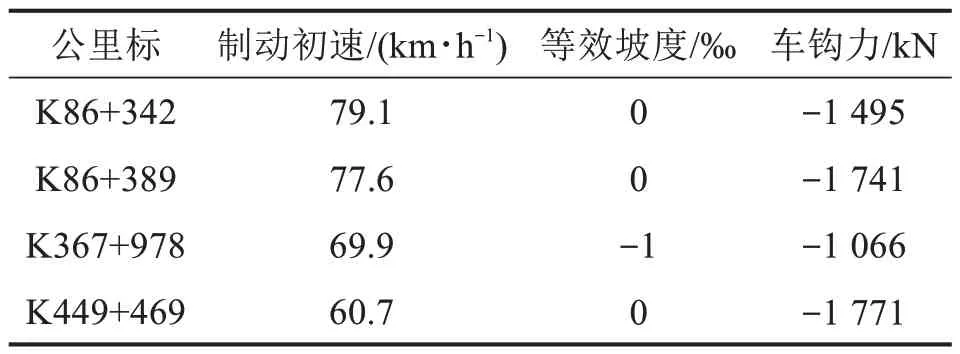
表2 從控機車隔離下的減壓100 kPa空氣制動停車工況Table 2 Process from 100 kPa service braking to stop with isolated slave locomotive
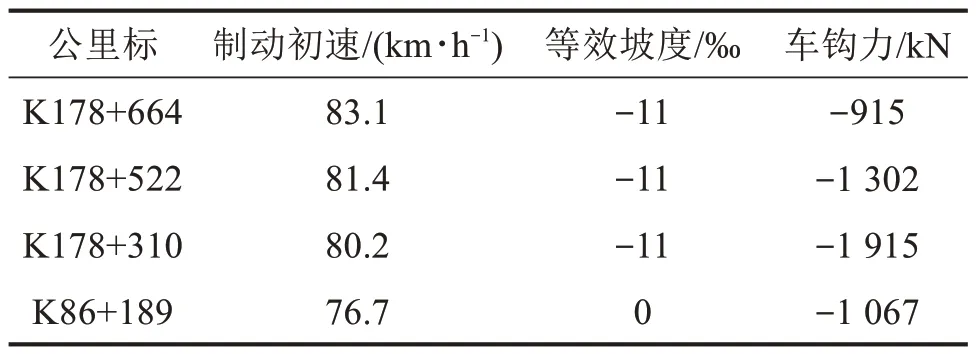
表3 常用全制動停車工況Table 3 Process from 170 kPa service braking to stop
根據表1~表4可以看出,隨著制動初速的降低、坡道變陡、制動作用的加大,車輛縱向力均呈現出上升趨勢。同時,當中部機車發生工況切換制動力歸零時,相當于發生中部機車的切除,車輛縱向沖動將加大。因此,在考慮工況切換的機車控制策略時,應當對中部機車上的電制動力與空氣制動力的匹配關系進行研究,進而優化重載組合列車的縱向力分布,提高列車運行的安全性。
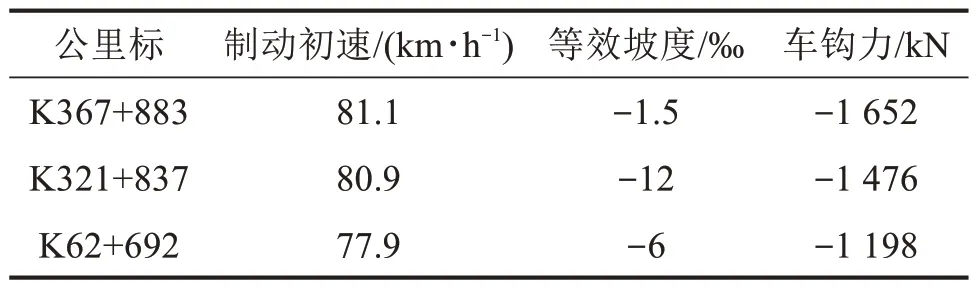
表4 緊急制動停車工況Table 4 Process from emergency braking to stop
2.2 循環制動調速工況
在2個連續的長大下坡區段,僅依靠前后重聯機車的電制動力難以將列車速度控制在線路允許的范圍之內,必須通過數次循環空氣制動才能使速度得到有效控制。其中,第1坡段一般需要經過3次循環制動調速,第2坡段則需要經歷4~5次循環制動。每次循環制動的減壓量固定為50 kPa,制動初速一般在70~80 km/h之間,緩解初速通常在30~50 km/h之間,制動持續時間則根據控制列車的速度目標值掌握。循環制動過程中,通常還帶有一定的電制動力,因此在這一過程中對從控機車縱向力產生影響的因素較多。
試驗結果可知,在2個坡段每一次的制動-緩解循環中,縱向力的變化過程具有共同特點,即在空氣制動減壓開始后,列車速度得以緩慢降低,在此過程中,主控和從控機車通常同時施加100~200 kN左右的電制力,此時列車縱向力屬于穩態變化過程,列車不會產生劇烈的縱向力沖動。當列車速度降低至30~50 km/h目標值后,主控機車發出緩解操縱指令,從控機車通常在4 s內產生同步動作,開始充風緩解。當緩解開始30~50 s的時間段內,頭部主控機車通過列車管向其后部車輛充風,中部從控機車向其前后車輛充風,由于列車尾部距中部機車較遠,列車尾部車輛實際充風緩解速度要慢于前部車輛,使得前半列車輛緩解加快而后半列車輛緩解減慢,從而產生前后車輛的前后涌動,對從控機車形成壓鉤和拉鉤力的交替作用。
這2個坡段典型的循環制動及車鉤力變化過程,如圖4和圖5所示。由圖可知,中部從控機車的縱向力突變會在緩解開始后的一個較短時間段內出現。
公路橋梁施工之前,需要做好充分的準備工作,進而保證公路橋梁的施工能夠順利的進行。施工之前,相關管理人員需要對施工現場進行實地調查,對施工設計方案進行審查,根據實際情況對施工方案進行合理的修改。需要提前考慮好施工過程中可能遇到的各種問題,然后嚴格根據施工方案以及相關規范標準的要求進行施工。如果在施工過程中發現問題,需要及時采取相應的解決措施,進而保證公路橋梁施工的質量以及安全。
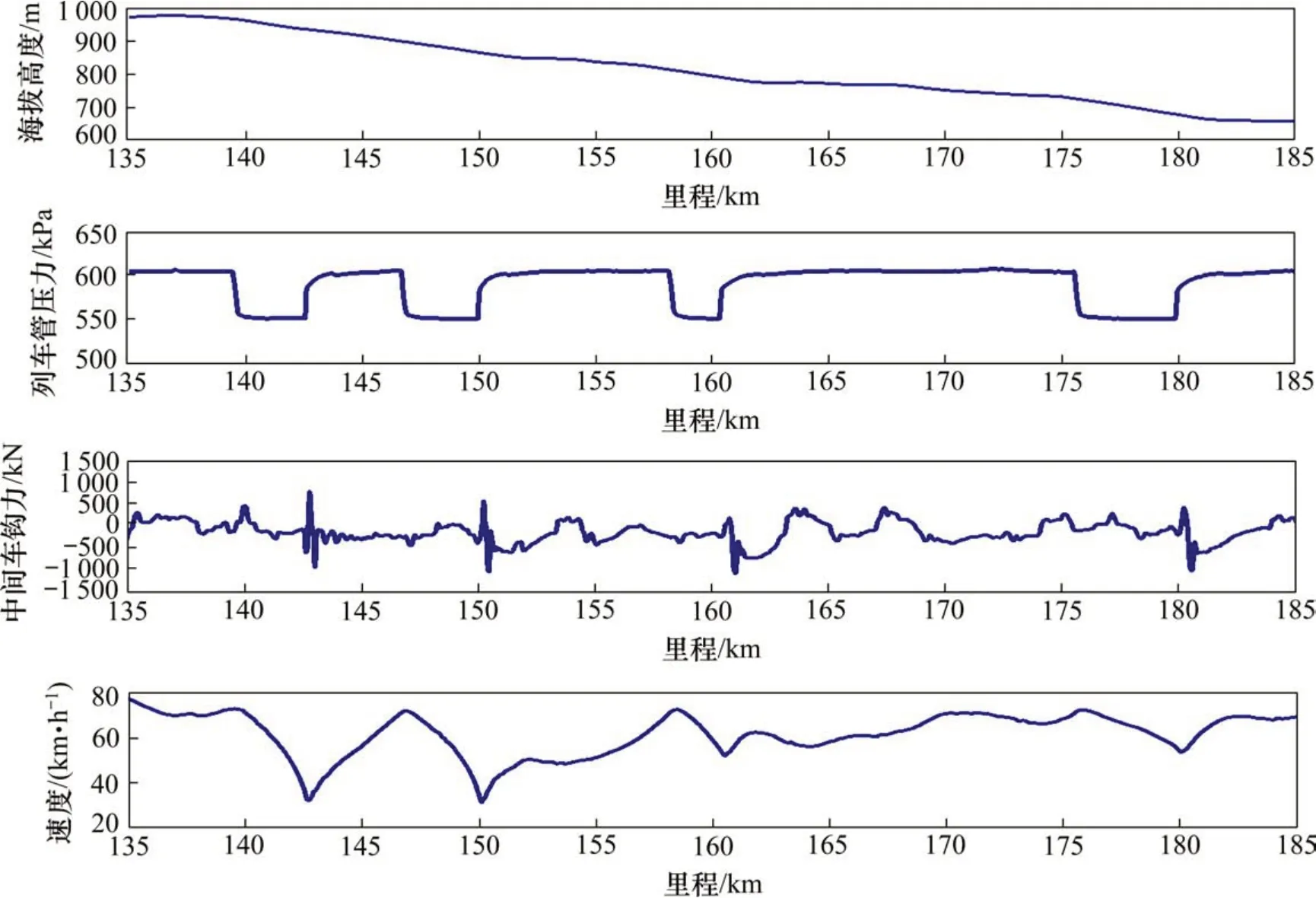
圖4 第1坡段循環制動調速過程典型示例Fig. 4 A typical example of the first slope section cyclic braking speed regulation process
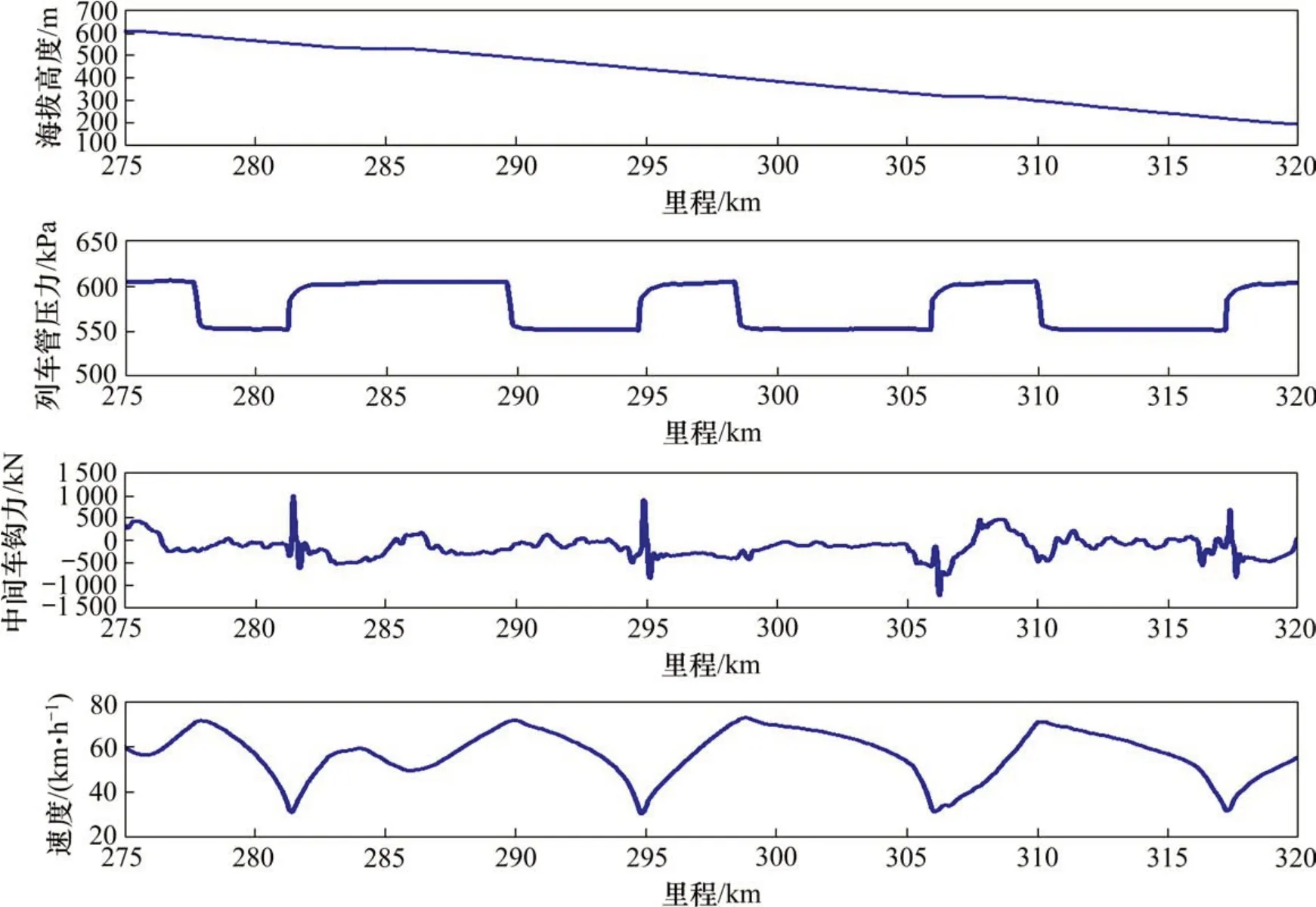
圖5 第2坡段循環制動調速過程典型示例Fig. 5 A typical example of the second slope section cyclic braking speed regulation process
圖6所示為第1坡段中典型的一次循環制動調速全過程示例。由圖可知,減壓制動過程中縱向力始終處于低水平,最大拉鉤力不超過300 kN,最大壓鉤力不超過100 kN。而當緩解開始后的一個較短時間段內,中部從控機車縱向力經歷了一次從拉鉤至壓鉤急劇變化并逐漸衰減的過程,整個過程大約持續30 s,最大縱向力正是發生在這一過程中。
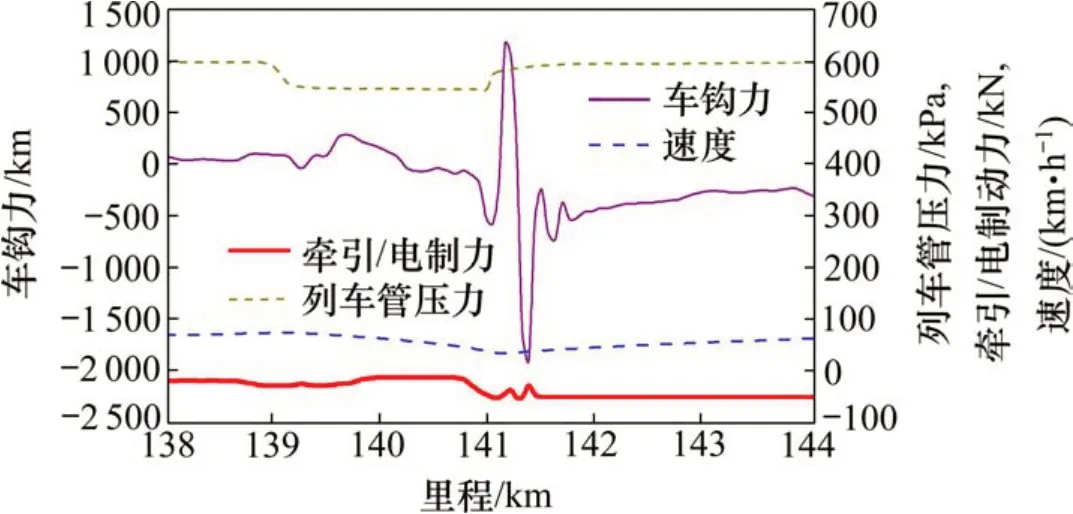
圖6 循環制動過程中的縱向力Fig. 6 Longitudinal force during cyclic braking process
圖7給出了2個坡段范圍內,從控機車縱向力的分布狀況。從圖中可以看出,2個坡段內各次循環制動產生的縱向拉鉤和壓鉤力的總體水平基本相當,最大值都基本維持在±1 500 kN左右,且每個坡段的首末次循環制動所造成的縱向拉鉤力相對較大,中間次循環制動所造成的縱向力相對較小。

圖7 2個坡段的循環制動所造成的從控機車縱向力Fig. 7 Longitudinal force of slave locomotive during cyclic braking process during two slope sections
3 縱向力影響因素分析
為了明確重載列車調速制動過程中不同因素對縱向力的影響,本節對試驗過程中影響中部從控機車縱向力的若干因素進行了關聯性分析。其中,主要考慮了等效坡度、制動初速、緩解初速、制動-緩解初速差和電制力等。本節試驗的列車編組及測力車鉤位置均與第2部分的試驗條件一致。
3.1 坡度的影響
將在循環制動調速過程中,從控機車所受的縱向力與該循環所經過路段的等效坡度進行相關性分析,結果如圖8(a)所示。從圖中縱向力的分布趨勢可以看出,在坡度小于6‰的區段上基本無拉鉤力的作用,隨著等效坡度的增大,縱向拉鉤力幅值逐漸增長,并在坡度為9‰左右達到最大值,之后呈現下降趨勢。壓鉤力幅值則隨著等效坡度的增大逐漸減小。
3.2 制動初速的影響
圖8(b)給出了從控機車所受縱向力隨循環制動初速的分布關系。從圖中可以看到,拉鉤力峰值基本不受制動初速的影響,而壓鉤力峰值則隨著制動初速的增大而增長,制動初速在65 km/h以下時,縱向壓鉤力低于1 000 kN。
3.3 緩解初速的影響
圖8(c)所示為從控機車縱向力隨緩解初速的分布狀況。從中可以看到,緩解初速越低,拉鉤力呈現逐漸增大趨勢,壓鉤力呈現逐漸減小趨勢。
3.4 制緩速差的影響
圖8(d)所示為從控機車縱向力隨制動-緩解初速差的分布狀況。從中可以看到,隨著速差的增大,拉鉤力略有增大的趨勢,而壓鉤力基本保持穩定。拉鉤力和壓鉤力與速差的關聯性不明顯。
3.5 電制動力的影響
在2個坡段循環制動的過程中,機車通常還需施加一定的電制動力。圖8(e)給出了從控機車所受縱向力隨電制動力變化的情況。從圖中可以看出,隨著電制動力的增大,縱向壓鉤力有所增大,而拉鉤力逐漸減小。

圖8 從控機車縱向力與各個要素之間的關系Fig. 8 Relationship between longitudinal force of slave locomotive and various elements
4 重載列車運行安全性提升途徑
由上述分析可知,雖采用了同步操控措施,但在制動調速過程中,中部從控機車仍然處在較大的縱向力作用下。如此,行車安全風險則主要存在于2個方面:一是當拉鉤力過大時,容易造成車鉤、緩沖器或車體的結構破壞,且長期的大拉鉤力運行也會產生疲勞損傷;二是當壓鉤力過大時,車鉤和緩沖器的受壓穩定性將起到關鍵作用,一旦出現壓屈失穩,車鉤將發生向一側的不可逆偏轉。此時,巨大的縱向力就會通過偏斜的車鉤轉換成很大的橫向分力作用在車鉤尾部,并通過車體-轉向架傳遞到輪軌,最終需靠輪緣貼靠鋼軌產生的輪軌橫向力才能得以平衡。但同時,由于輪軌橫向力作用到鋼軌上產生的傾覆力矩,此時鋼軌的抗側翻能力就成為了關鍵,當其超出了鋼軌的承載極限時就會將鋼軌擠翻造成車輪掉軌,或是當輪軸橫向力過大,突破了軌排橫向穩定極限時,便會造成整個軌排的橫移,而威脅到后部列車的運行安全。
由上述機理分析可知,提升重載列車運行安全性有2種途徑:一是提高鉤緩裝置的受壓穩定性;二是通過優化操縱,盡可能把縱向力控制在低水平。
4.1 提高鉤緩裝置的受壓穩定性
在鉤緩裝置的抗壓穩定性方面,我國鐵路機車大量采用的是100型車鉤,其通過鉤尾圓柱面傳遞縱向力,同時所產生的摩擦力和借助于鉤尾扁銷使車鉤穩定在最小偏轉角等,都可有效減小由縱向沖動產生的橫向分力。對于重載機車,車鉤緩沖裝置目前大量配套使用了膠泥緩沖器,如圖9所示。
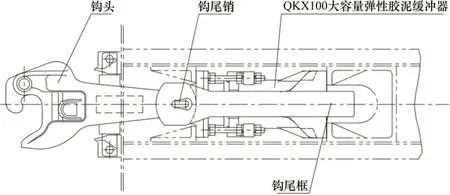
圖9 100型車鉤+QKX100型膠泥緩沖器結構示意圖Fig. 9 Structure diagram of type 100 coupler + QKX100 cement buffer
隨著重載組合列車的高強度作業需求,目前服役的部分QKX100型彈性膠泥緩沖器也出現了彈性膠泥芯子的膠泥泄漏問題。膠泥芯子的密封失效原因主要包括以下2點:1) 受到較大的縱向作用力。在循環制動調速過程中,會產生較大的車輛沖擊,中部機車所受的車鉤力大、動態載荷高,緩沖器需要吸收較大的沖擊動能。2) 膠泥芯子活塞柱的行程大。頻繁的往復運動將增大活塞柱相對密封圈的磨耗,使之超出自身補償的范圍,造成膠泥泄漏[19]。因此,從鉤緩裝置穩定性的角度考慮,應當減少重載組合列車在運行過程中的調速頻次,以減小車輛間的沖動,保障緩沖器工作的有效性。另外,從鉤緩裝置結構上考慮,為了提高壓鉤穩定性,必須注意保持車鉤尾部圓柱面處于干摩擦狀態,同時緩沖器對車鉤縱向運動要有足夠的跟隨性,即當車鉤出現縱向壓縮或釋放運動時,緩沖器必須緊跟車鉤的動作,使鉤尾始終保持在隨時可產生橫向摩擦力的狀態,這意味著緩沖器必須保持其良好的工作特性,鉤緩裝置在設計上需要加以完善。
4.2 優化操縱方法
4.2.1 利用坡度變化和改變電制力的優化操縱
以上試驗結果表明,線路坡度、緩解時的電制力都會對縱向力產生一定的影響,如能充分利用以上條件可實現降低列車縱向力的目的。借助坡度變化控制循環制動的緩解時機是一種減小列車縱向力的方法,如當前半列車輛處于較小坡度的下坡道甚至平坡道上,而后半列車位于較大下坡道時,列車充風緩解。此時,前半列車輛雖然緩解較快但下滑慣性力較小,后半列車輛雖然下滑慣性力較大,但因制動緩解較慢而受到制約,如圖10所示。

圖10 重載組合列車變坡道運行示意圖Fig. 10 Schematic diagram of ramp-changing running of heavy-haul combined trains
如此,便形成了前后半列車輛的縱向力自平衡,使得最終匯集到中部從控機車處的縱向拉鉤力顯著降低,弱化了“前拉后拽”現象。但是此方法只能降低緩解后的拉鉤力,反而會造成緩解后的壓鉤力增加,強化了“前堵后涌”現象。根據第3.5節的分析,降低列車緩解時的電制力可降低緩解后的壓鉤力,因此將二者結合能有效改善車輛的縱向沖動。
4.2.2 列車縱向動力學仿真模型
在列車實際牽引運行中,需要嘗試不同的操縱策略,找出最優操縱方法。而受牽引運行安全和試驗條件的制約,特別是一些極端試驗往往不能進行,所以需要建立重載組合列車縱向動力學模型,利用動力學仿真的結果,從中找出最優操縱方法,以指導司機進行優化操縱。
列車縱向動力學仿真主要用來分析不同車輛編組、不同車輛配置、不同運行工況及不同線路條件下組成列車的車輛間的縱向動力作用。列車縱向動力學仿真模型以每節機車車輛作為一個分離體,整列車的自由度等于組成列車的機車車輛總數,如圖11所示。

圖11 列車縱向動力學模型及車輛的受力示意圖Fig. 11 Schematic diagram of longitudinal train dynamic model and force
其基本原理是根據力學模型,考慮列車縱向運動的所有因素,包括機車的牽引和動力制動特性、列車空氣制動系統和鉤緩裝置的特性及各種運行阻力,按物理模型進行仿真,再對各個機車和車輛建立運動方程式,詳細求解列車中各節車輛的縱向運動過程[13]。
每節車輛上的縱向動力學微分方程為:
其中:i為第i節車,i=1~N;mi為第i節車的質量;為第i節車的加速度;Fci-1為第i節車的前車鉤力,當i=0時,Fci-1=0;Fci為第i節車的后車鉤力,當i=N時,Fci=0;FTEi為機車牽引力,僅作用于機車;FDBi為機車的動力制動力,僅作用于機車;FBi為空氣制動力,作用于機車車輛;Fwi為第i節車的運行阻力,包括基本運行阻力、坡道阻力、曲線阻力和起動阻力等。
對于組成列車的N節機車車輛,可列出N個微分運動方程,組成2階微分方程組。該方程組是一個非常復雜的非線性微分方程組,含有許多非線性因素,其中比較典型的有緩沖器的非線性阻抗特性、空氣制動力的非線性工作特性等。求解非線性動力方程組可采用新型顯示積分方法、New-Mark法、歐拉法、龍格庫塔法、威爾遜法、預測校正法等方法。本文選用大連交通大學重載列車縱向動力學仿真系統(TABLDSS)開展列車運行過程的仿真實驗,該系統采用歐拉法作為數值積分方法[20-21]。
4.2.3 縱向動力學仿真分析及優化結論
根據大秦線模塊化操縱規定,大秦線2萬t重載組合列車在K152+300~K152+800處以速度40~60 km/h緩解,緩解過程中電制力45%~50%。此區段線路縱斷面如圖12所示,列車在此處,前半列進入1.5‰的坡道,后半列仍在5.5‰~10‰的坡道上,根據之前分析,列車在緩解后不會產生較大的拉鉤力,但會產生較大的壓鉤力。根據現場應用統計表明,此區段較容易發生機車渡板變形事故,說明該區段易產生較大的壓鉤力。當列車運行至該區段時,在列車緩解后,列車的后半列受坡道重力分量繼續加速,而前半列列車由于坡度較小,將受到后列車輛的沖擊擠壓。為防止列車超過運行限速,需在主、從控機車上分別施加一定的電制動力。中部從控機車的電制動力將直接影響中部機車前后的車鉤力分布。當列車開始緩解,從控機車上施加的電制動力增大時,由于車鉤力的改變存在遲滯,中部機車的減速度將隨電制動力的變化而高于中部機車前、后的車輛,造成前部車輛拉伸和后部車輛的擠壓,進而產生沖擊。列車在穩定的制動狀態下,車鉤主要處于壓縮狀態,施加空氣制動緩解后,由于前部車輛的緩解速度較快,將更快加速,造成對后部車鉤緩沖裝置的拉伸。而在電制動力的作用下,機車的加速過程受到限制,車輛會對機車造成擠壓,進而從機車開始向后產生壓鉤力的傳遞。空氣制動波速差異帶來的拉鉤力和電制動作用引起的壓鉤力將相互影響,進而改變整列車的縱向力分布。綜上,當電制動力提高時,中部機車后部的車輛所受的最大壓鉤力將變大,之前車輛的最大拉鉤力將減小。中部機車后部的車輛在中部機車的作用下主要表現為壓鉤力,列車的最大拉鉤力主要分布在中部機車之前。電制動力對中部機車前后部車輛最大車鉤力的影響結論也可引申到整列車的最大車鉤力分布。
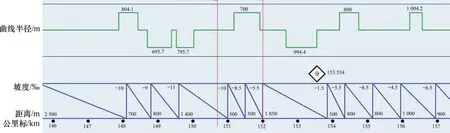
圖12 大秦線部分縱斷面示意圖Fig. 12 Section of Daqin railway schematic diagram
利用仿真模型對大秦線實際運行的3趟列車(2020年9月28日,10月6日和10月8日)進行了仿真計算,對K152 km緩解后產生的最大車鉤力(從控機車后鉤)進行統計,結果如表5所示。仿真系統將列車LKJ,6A以及機車相關等運行數據導入仿真模型中,真實還原列車原操縱。仿真系統軟件將實時輸出列車的速度與車鉤力,當仿真的列車速度與LKJ的運行速度一致時,證明仿真車輛的受力情況與真實工況較為一致,此時輸出的車鉤力將較為可靠,仿真系統如圖13所示,圖中左側實時輸出某一位車鉤縱向力,右側輸出列車運行速度曲線。3趟列車采用的原操縱辦法,在K152 km左右緩解時的前30 s至后40 s將保持50%電制力,即表5中的50%電制工況。

圖13 縱向動力學仿真模型Fig. 13 Longitudinal dynamics simulation model
根據上述理論,降低電制力將有利于減小列車產生的壓鉤力。因此,將K152 km左右緩解時的前30 s至后40 s將保持30%電制力作為優化工況,將仿真結果與50%電制力原工況比較,驗證電制力降低對列車縱向沖動減小的有效性。試驗結果記入表5中的30%電制工況。
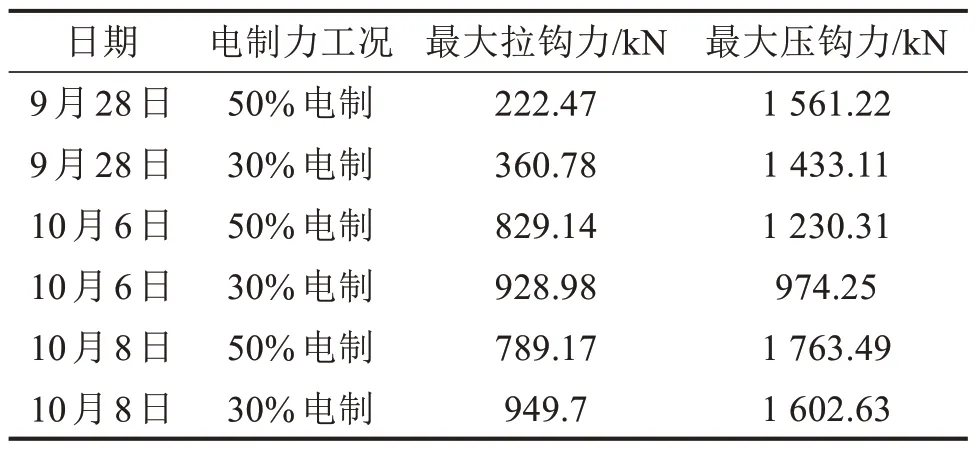
表5 50%電制力原工況與30%電制力優化工況仿真對比Table 5 Simulation comparison between 50% electric braking force of original condition and 30% electric braking force of optimized working condition
仿真計算結果表明,大秦線2萬t重載組合列車在K152 km左右緩解時,產生的壓鉤力明顯大于拉鉤力,說明列車在此區段上不易產生較大的拉鉤力,而存在壓鉤力偏大的情況。對比2種50%和30%電制力工況,發現通過降低電制力,可在一定程度上降低重載組合列車中部機車的壓鉤力,其拉鉤力雖有所增加但仍在合理范圍內。同時,利用坡度變化和改變電制力的優化操縱,可實現降低重載組合列車縱向沖動的目的,有利于減緩重載組合列車縱向沖動所帶來的危害,保障列車運行安全。
5 結論與展望
1) 通過考慮等效坡度、制動初速、緩解初速、制動-緩解初速差和電制力對縱向動力學的影響,分析了提升重載列車運行安全性的2種途徑,建立了列車縱向動力學仿真模型,通過驗算優化了操縱方法。
2) 通過理論分析和大量的實際線路運行試驗,可以掌握具體某條線路上重載列車的縱向力作用規律,通過優化操縱和提升機車車輛結構承壓穩定性,可以保持重載列車在各種工況下的運行安全性。這也表明,重載列車開行對司機操縱提出了更為嚴苛的要求,為避免由于司機操縱失誤而造成嚴重后果,重載列車應大力推進自動駕駛或計算機指導輔助操縱的研究。
3) 借助于現代化科學仿真手段,建立了重載組合列車縱向動力學模型,分析了大秦鐵路2段長大坡道循環制動工況下不同的緩解電制動力方案,進行了動力學仿真及總結。在以后的應用中,應繼續優化模型,在虛擬環境條件下預先了解多種重載組合列車運行的縱向力狀況和運行安全性裕量,甚至可以在重載線路的選線設計初期階段就提出指導性意見。
