某發動機智能化試車系統的應用研究
2023-02-26 09:17:32羅宿明華繼偉單曉明華稱祥
中國科技縱橫 2023年24期
陳 偉 羅宿明 華繼偉 單曉明 華稱祥
(中國航發湖南動力機械研究所,湖南株洲 412000)
0 引言
航空發動機在研制、批產、使用全過程中,試驗是一個至關重要的環節,大多數的技術質量問題可以在這個環節暴露。一方面,必須按照相應規范和要求,開展大量考核性驗證和試驗,滿足產品安全性、可靠性和使用壽命的要求;另一方面,由于實際工作的復雜性、使用狀態的差異性、客觀現實的不適應性等原因,目前還不能完全通過數值仿真和分析預測解決發動機全包線范圍內的所有問題。因此,在航空發動機技術發展過程中,試驗及測試貫穿研制過程和技術發展的各個環節,且占比依然很大[1]。有效的試驗數據可以修正和完善航空發動機設計理論和數值仿真計算模型,不斷推動航空發動機設計技術的創新發展[2-3]。
某型渦軸發動機是中法雙方以“風險共擔、對等合作”方式聯合研制的具有第四代技術特征的先進民用渦軸發動機,首裝7 噸級民用直升機。該型渦軸發動機在適航取證階段,需要驗證發動機投入使用后,在3000 小時的翻修間隔期(TBO)內能正常工作,研制團隊通過采用加速任務試驗的方式進行驗證,但該加速任務試驗譜復雜、試驗時間長。綜合考慮后,研制團隊最終確定利用智能化試車系統開展試驗[4]。在應用智能化試車系統開展試驗的過程中,出現了“動力渦輪轉速超調過大”“動力渦輪轉速無法保持穩定”等問題,本文針對出現的問題,通過對發動機特性、智能化試車系統控制邏輯、發動機試車臺特性等進行分析研究,分析問題產生的原因,并提出經調試試驗驗證有效的解決措施,對智能化試車系統的適用性進行有效完善,保證適航取證加速任務試驗的順利完成。
1 智能化試車系統
智能化試車系統是基于某型發動機加速任務試驗項目需求進行開發的,智能化試車可根據預先編制的試驗譜進行智能化試車,可根據設定實現快速加減速,具備手動試車模式和自動試車模式切換能力,有效地減少工作人員的誤操作率和工作量,并具有可靠、完善的保護功能。試驗過程中,智能化試車系統通過調節水力測功器負載、發電功率、引氣量等方式滿足試驗譜對各項參數指標的要求[5]。
智能化試車系統獨立于試車臺常規測試系統和電氣系統之外,即在未接入試車臺時,車臺能完成既有的手動試車功能。在接入試車臺后,只需完成通信和硬線接口對接以及發動機特性參數的設置,即能實現對發動機試車過程的智能化控制[6]。
智能化試車系統不直接采集數據和控制設備,而是通過高速以太網通信和硬線信號實現數據交互。在正常使用中,通過與測試系統通信獲得發動機試驗參數后,智能化試車系統根據試驗譜設置的目標,計算得到試車臺油門桿信號、引氣閥開度等設備控制的目標值,并將指令發送給電氣系統執行。自動試車的過程中,如果發生超限報警等情況,可按試驗大綱要求實施保護動作[7]。
智能化試車系統程序主要包括PLC(可編程邏輯控制器)程序和上位機程序兩個部分。PLC 程序完成對發動機、測功器以及車臺設備等的自動控制和保護;上位機程序完成自動試車的相關設置、試驗進度統計、試驗數據通信和實時監控等功能。為確保發動機安全,智能化試車系統具有超溫、超轉、振動大、喘振等緊急停車保護的功能,試車臺控制原理圖如圖1 所示;具有報警后自動下拉發動機到慢車且1 分鐘后自動停車的功能;具有實時監視轉速、溫度、滑油壓力等參數,并做出提醒的功能;操作員手動油門桿優先;手動緊急停車優先;全方位確保發動機安全。

圖1 試車臺控制原理圖
加速任務試驗過程中,發動機采用動力渦輪轉速控制模式(Np 控制模式),即通過改變水力測功器負載控制發動機轉速、溫度等,根據加速任務試驗大綱要求,試驗譜以燃氣發生器轉速(Ng)和燃氣渦輪出口處燃氣溫度計算值(T45REF)為考核指標,需兩項指標分別或同時達到目標值。
智能化試車系統對發動機動力渦輪轉速(Np)的控制邏輯:智能化試車系統根據預先編輯的試驗譜,讀取動力渦輪轉速目標值,然后轉換成電位信號(油門桿角度XPC)。一方面,XPC 信號傳遞至車臺水力測功器,水力測功器通過調節進出水閥門開度改變水力測功器負載;另一方面,XPC 信號傳遞至發動機電子控制器(EECU),EECU 通過控制發動機增減燃油流量(Wf)改變發動機產生的功率。通過對水力測功器負載和Wf 的調節控制Np。
在加速任務試驗的準備階段,研制團隊應用智能化試車系統進行了多次調試試車,出現了“動力渦輪轉速超調過大”“動力渦輪轉速無法保持穩定”等問題。
2 動力渦輪轉速超調過大
2.1 現象
試驗過程中,智能化試車系統控制發動機切換狀態時,Np 會有較大的超調,快速上推油門桿(XPC)后,Np 會短時間增加,然后穩定在Np=100%的目標值,經查看數據,最大超調量為3.8%,狀態切換時Np 超調曲線圖如圖2 所示。
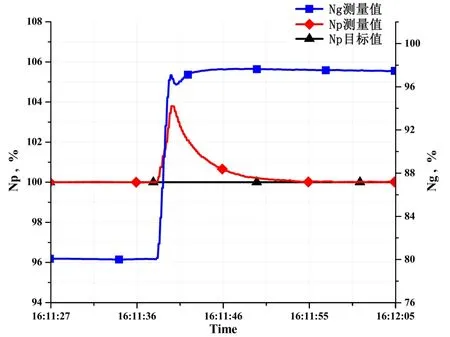
圖2 狀態切換時Np超調曲線圖
2.2 原因分析及措施
對當次試驗數據進行分析,狀態切換時Wf、水力測功器負載、Np 的曲線圖如圖3 所示。智能化試車系統開始上推油門后,XPC 信號給出,此時EECU 控制發動機開始增加Wf,水力測功器增加負載,但水力測功器負載的變化相對于Wf 的增加有延遲(圖3 中的Wf 從724 號計時點開始響應,水力測功器負載從734 號計時點開始響應,考慮到采集頻率為10Hz,所以水力測功器負載開始增加的時間比Wf 開始增加的時間滯后了1 秒),即發動機Wf 增加1 秒后,水力測功器才開始增加負載,導致水力測功器負載在短時間內小于發動機保持Np=100%所需的負載,從而動力渦輪轉速超調較大。
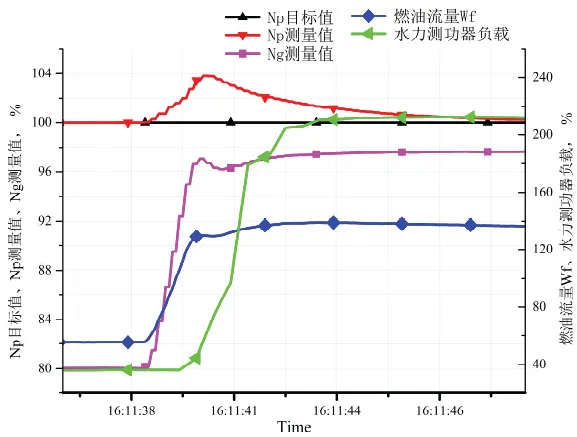
圖3 狀態切換時Wf、水力測功器負載、Np曲線圖
對智能化試車系統的信號傳輸路徑進行分析發現,XPC 信號分兩路傳輸到EECU 和水力測功器。由于EECU有提前增加Wf 的機制,導致XPC 信號傳輸到EECU 時,EECU 控制發動機提前加油,以保證適應水力測功器做出負載變化;而水力測功器則在收到XPC 信號后負載變化響應較慢、跟隨性差,兩種信號路徑造成的Wf 增加與負載變化響應的時間差過大,使開始以后很短的時間內,水力測功器的負載增加值會小于發動機功率的增加值,造成動力渦輪轉速超調過大。
因此,可以通過調整XPC 與水力測功器的匹配性優化水力測功器和發動機的跟隨性,即使得EECU 根據XPC 的改變計算的提前量產生的功率變化和水力測功器負載的變化能較好匹配,從而減少Wf 開始增加和水力測功器負載開始變化的時間差。
調整XPC 與水力測功器負載匹配值后,狀態切換時Wf、水力測功器負載、Np 曲線圖如圖4 所示,當發動機狀態從空慢狀態切換到Ng=97.45%時,XPC 在1 秒內改變,當XPC 變化后,Wf 在0.3 秒后開始變化,水力測功器負載在0.8 秒后開始變化,二者時間差由之前的1 秒降低到0.5 秒,Np 超調量則由之前的3.8%降低到本次的1.38%。經試驗驗證,在調整XPC 與水力測功器的匹配性后,Np 超調量明顯降低(降低63.7%),該方式可以有效解決動力渦輪轉速超調過大的問題。
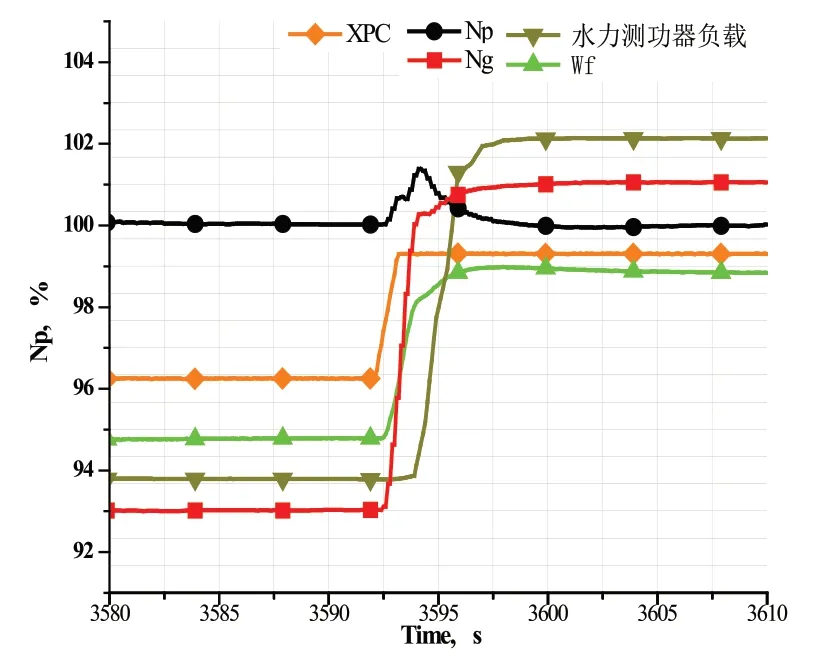
圖4 調整XPC與水力測功器負載匹配值后,狀態切換時Wf、水力測功器負載、Np曲線圖
3 動力渦輪轉速無法保持穩定
3.1 現象
研制團隊利用智能化試車系統,按照加速任務試驗的試驗譜進行調試。按照試驗譜要求,設置Np=104%,Ng從97.80%自動上推至99.48%,狀態切換時,Np 出現了“下降、上升、保持”的現象,兩次出現此現象后,試車員下拉發動機至飛行慢車,如圖5 所示。

圖5 Np=104%,Ng從97.80%切換至99.48%時Np無法穩定
但是,當設置Np=90%,Ng 從96.94%自動上推至99.34%時,試驗過程中未出現上述Np 不穩定的現象,如圖6 所示。
3.2 原因分析及措施
在圖5 中,當智能化試車系統發出信號使EECU 增加Ng 時,EECU 控制發動機增加Wf,同時保持Np 不變,此時燃氣渦輪出口處燃氣溫度測量值(T45M)相應增加。當T45M 增加到一定值時,保持該溫度值不再上升,初步判斷此時是因為EECU 控制軟件設置了T45M限制值,導致EECU 控制發動機快速減小了Wf 的增加率,相應的Ng 增加緩慢。
但由于智能化試車系統的控制邏輯是通過控制試車臺的XPC 角度改變水力測功器負載,進而依靠發動機的Np 控制模式使發動機改變Wf,達到改變Ng 的目的。在T45M 達到限制值時,由于Ng 尚未達到目標值Ng=99.48%,此時智能化試車系統會持續增加XPC 角度,導致水力測功器負載持續增加,但是發動機Wf 受限于EECU 控制,增加很少,導致此時發動機功率的增量無法抵消水力測功器負載的增量,從而動力渦輪轉速持續減小。
在圖5 中Np 第一次“下降、上升、保持”的過程中,當Np 在不斷降低時,EECU 由于有包含Np 的閉環控制存在,雖然T45M 有限制,但仍會控制發動機不斷緩慢地增加Wf,以提升Np 至設定值Np=104%,此時對應的Ng 緩慢上升。從圖5 中可以看出,此次Np“下降、上升”過程中,Ng 最終緩慢增加到Ng=100.27%,高于智能化試車系統的目標值Ng=99.48%,當發動機Ng 高于目標值Ng=99.48%時,由于智能化試車系統有包含Ng 的閉環控制存在,系統將控制XPC 下降,以滿足試驗譜的Ng=99.48%的目標值要求。此時,隨著XPC 降低,水力測功器負載對應降低,Np 逐漸上升。在Np 上升到104%前,EECU 仍會一直控制發動機增加Wf,直到最終Np 上升至104%。
整個Np“下降、上升”過程中,由于T45M 有限制,在兩個閉環控制過程耦合的情況下,造成了在水力測功器負載增加過程中,發動機無法明顯增加Wf,導致Np 出現“先降低后上升”的現象。
在圖6 中可以看到,在達到Ng 目標值Ng=99.34%時,T45M 不高,說明在發動機T45M 達到限制值前,智能化試車系統就已經完成了狀態切換,故未造成Np 轉速不穩定的現象。
根據上述分析結論,對EECU 中T45M 限制值進行了檢查并修改,在后續試驗中,未再出現Np 無法保持穩定的情況。
4 結論
本文針對某型發動機在加速任務試驗過程中應用智能化試車系統出現的問題,通過對發動機特性、智能化試車系統控制邏輯、發動機試車臺結構及特性等進行分析研究,提出了具體的解決措施,有效解決了動力渦輪轉速超調過大、動力渦輪轉速無法保持穩定等問題,完善了該智能化試車系統,進一步提升了該智能化試車系統的適用性,推進了智能化系統的深入應用,促進了該型發動機加速任務試驗的順利進行。最終,在中國民航局適航審定中心的見證下,利用智能化試車系統圓滿完成了加速任務試驗,試驗控制精度高、試驗質量得到了良好的保證,有效避免了試驗誤操作且大幅減少了試驗工作量。
本文中研究的兩個問題對其他發動機應用智能化試車系統開展試驗具有一定的借鑒意義。后續可以繼續對發動機本體控制系統和智能化試車系統的匹配開展深入研究,進一步優化智能化試車系統本身的控制邏輯、安全保護機制等。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
印刷工業(2020年4期)2020-10-27 02:45:52
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國交通信息化(2017年4期)2017-06-06 07:21:52
能源(2015年8期)2015-05-26 09:15:56
汽車與新動力(2015年1期)2015-02-27 12:11:01