基于RBF神經網絡的某型號行星變速器傳動效率試驗及預測研究
2023-02-27 09:55:46楊海軍楊虎城黃俊清喬昱付中華馮瑞龍高峰
機械工程師 2023年2期
楊海軍,楊虎城,黃俊清,喬昱,付中華,馮瑞龍,高峰
(1.內蒙古第一機械集團有限公司,內蒙古 包頭 014000;2.內蒙古農業大學 職業技術學院,內蒙古 包頭 014199)
0 引言
新能源汽車目前正處于高速發展階段,變速箱作為新能源汽車動力傳動系統的重要組成部分,采用電動機+多擋行星變速箱的傳動形式是解決新能源汽車低速狀態大轉矩要求和高速穩定行駛的一個有效途徑,大功率變速箱技術的發展對于我國新能源汽車動力平臺整體性能的提升有著十分積極的促進作用,極大地促進了新能源汽車的發展。
行星變速器是通過行星齒輪組來轉換擋位,實現車輛在行駛中的變速目的,在大型機械設備傳動系統中應用廣泛。關于行星變速器,國內學者做了大量的研究。張永釗[1]通過分析單個行星排,描述出行星齒輪機構的傳動原理規律,并分析擋位變化;龐小蘭[2]結合仿真和試驗,著重分析了行星齒輪傳動動態性能的變化規律;基于Matlab軟件仿真平臺,李娟玲等[3]分析了大功率拖拉機的液壓機無級變速箱動態特性;馮輔周等[4]通過3種軟件建立行星變速箱齒輪-箱體剛柔耦合動力學模型,分析了行星變速箱4種重要參數并得到最佳值,并通過試驗驗證了仿真值。符金滔等[5]提出故障量化和加權評價的方法,有助于簡化變速器機械零件失效分析過程。為提高坦克行星變速箱齒輪故障模式識別的準確度,吳守軍等[6]提出基于VMD-DE的故障診斷法,并通過試驗驗證了該方法的有效性;張強等[7]基于自由模態試驗法對行星變速機構進行模態分析,并同仿真分析進行對比,驗證了模態試驗的重要性。
行星變速器傳動效率是影響整車運行的重要因素,考慮到實際測試設備造價高、全參數測試周期較長等問題,本文對一種新型變速器進行傳動效率測試,然后以測試數據作為樣本,基于神經網絡算法構建傳動效率預測模型,并驗證預測模型的準確性,為行星變速器傳動效率檢測提供新思路。
1 試驗測試
1.1 試驗準備
圖1所示為某型號兩擋行星變速器的整體結構,箱體采用鑄造鋁合金結構,傳動零件采用優質合金鋼材料,設計結構在保證尺寸要求的前提下又能滿足剛度、強度要求。

圖1 某型號行星變速器三維結構
在新生產的產品中隨機抽取試驗樣品,將行星變速器安裝在試驗臺上,如圖2所示。將80W/90中負荷車輛齒輪油加入行星變速器內,注油量為行星變速器油位塞冒油為止。變速器輸入轉速500 r/min,運轉3 min停止,補充加入潤滑油,再次檢查油面高度。

圖2 某型號行星變速器傳動效率測試平臺
給定不同轉速和轉矩,當油溫為(80±5)℃時,利用傳感器分別監測并記錄不同工況下行星變速器的輸入轉速、輸入轉矩、輸出轉速、輸出轉矩。
1.2 數據處理及評價指標
1.2.1 數據處理
各輸入轉速下的傳動效率ηi計算公式為式

中:ηi為變速器各擋傳動效率;M1為第一軸的輸入轉矩;M2為輸出軸的輸出轉矩;n1為第一軸的輸入轉速;n2為輸出軸的輸出轉速。
變速器平均傳動效率計算公式為

式中:η總為變速器平均傳動效率;Ij為變速器各輸入轉速的試驗次數;ηi為變速器各輸入轉速的傳動效率。
1.2.2 評價指標
在行星變速器掛1擋、輸入轉速為1554 r/min、輸入力矩為1100 N·m、油溫為80 ℃的試驗條件下,傳動效率≥95%。
1.3 結果分析
1.3.1 轉速和轉矩變化
在電動機的帶動下,行星變速器掛1擋,輸入轉速從204 r/min提升到1408 r/min,給定不同的輸入轉矩,監測在正反轉工況下的輸出轉速和輸出轉矩變化,如圖3、圖4所示。正轉工況監測43次,反轉工況監測39次。
由圖3可知,在正反轉工況下,輸出轉速始終大于輸入轉速,且隨著轉速的提高,輸出轉速和輸入轉速的差值增大。

圖3 輸入和輸出轉速變化
由圖4可知,在正反轉工況下,輸出轉矩始終小于輸入轉矩,且隨著轉矩的提高,輸出轉速和輸入轉速的差值增大。

圖4 輸入和輸出轉矩變化
1.3.2 功率變化
圖5所示為在不同轉速和轉矩下行星變速器的輸入功率和輸出功率變化。從圖5中可以看出,在每一個轉動周期內,隨著輸入功率的增大,輸出功率和輸入功率差值逐漸增大,功率損失相應變大。

圖5 輸入和輸出功率變化
1.3.3 傳動效率
圖6所示為不同功率下的行星變速器正反轉的傳動效率。從圖6中可以看出,在規定測試條件下,除個別測試工況外,該行星變速器基本可以保證傳動效率≥95%,滿足設計使用要求。

圖6 行星變速器正反轉傳動效率
2 預測研究
2.1 RBF神經網絡模型
圖7所示為RBF神經網絡結構,結構形式比較簡單,共包含3層,輸入層由信號源節點組成,隱含層負責連接輸入和輸出,對不同輸入賦予不同大小的權重,輸出層對前面傳遞的輸入做出響應,RBF 函數作為隱層單元變換函數[8-12]。
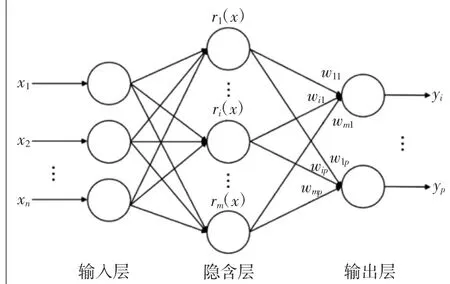
圖7 RBF神經網絡結構圖
作為基函數的形式有很多種,最常用的為高斯函數,計算公式[8]為
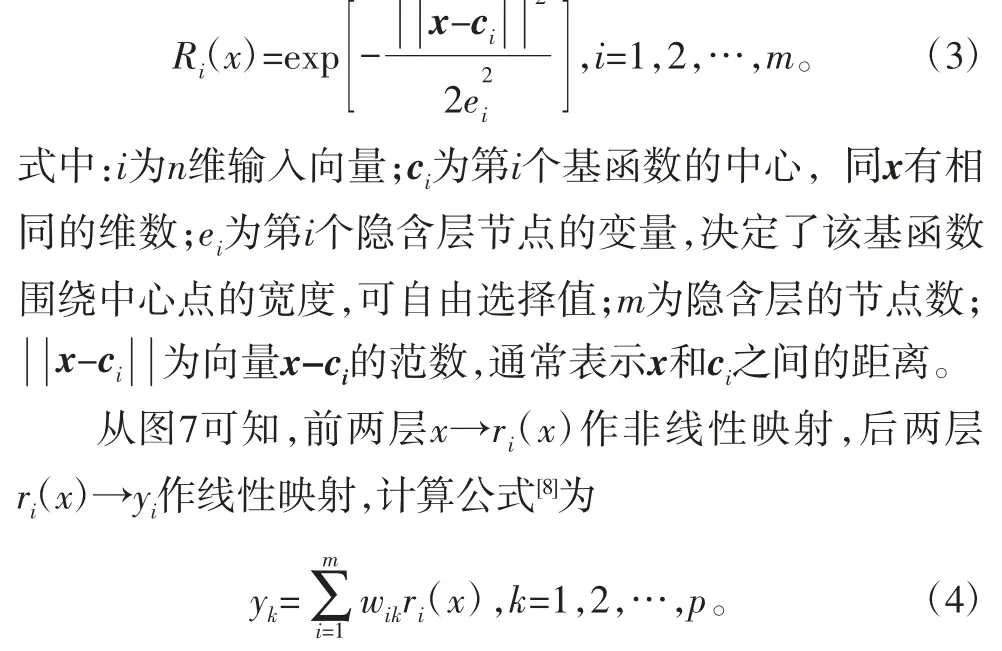
式中:yk為輸出節點k的輸出;wik為隱節點i與輸出節點k的連接權值;p為輸出節點數。
2.2 網絡訓練和預測驗證
2.2.1 樣本準備
將輸入轉速、輸入轉矩、輸入功率作為輸入層參數,傳動效率作為輸出層參數,測試數據分別作為訓練樣本和驗證樣本。為了保證訓練網絡模型具有一定的預測準確性,盡可能取多組數據樣本進行訓練。最終,取66組數據作為樣本,其中7組作為驗證樣本,驗證網絡模型的預測準確度,余下59組作為訓練樣本,驗證樣本如表1所示。

表1 驗證數據樣本
2.2.2 模型訓練
Matlab工具箱中包括多種不同函數,可用來建立并訓練模型。建立RBF網絡模型,設定誤差為0.003,擴展速度為13,顯示頻率為1,訓練模型自行調整隱層神經元數目,初始設定為300。由圖8可知,經過43步迭代后,滿足訓練精度要求。

圖8 RBF網絡均方差與訓練步數關系
2.3 預測結果分析
圖9所示為利用訓練好的神經網絡模型對行星變速器傳動效率進行預測的結果,并同試驗值進行了對比。從圖9中可以看出,傳動效率預測曲線和試驗曲線走向基本一致。對比預測結果和試驗值,傳動效率均相差較小,最大差值為0.22,且出現在輸入轉速為-1173 r/min和輸入轉矩為-366 N·m的工況,說明試驗測試值具有可信性和普遍性,預測模型預測精度較高。

圖9 預測值和測試值對比
3 結論
本文首先采用試驗測試方法,監測新型行星變速器在1擋轉動時的轉速和轉矩變化,并計算傳動功率和傳動效率;然后將各工況下傳動效率作為樣本數據,采用RBF神經網絡,建立行星變速器傳動效率預測模型,并成功進行訓練和驗證。研究表明:某型號行星變速器的傳動效率滿足設計使用要求;構建的RBF神經網絡模型能較好地預測行星變速器的傳動效率。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
甘肅教育(2020年14期)2020-09-11 07:57:42
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32
