基于OpenCV的車道線檢測算法改進研究
2023-02-28 08:17:06曹樂樂金宗毅李明穎孟慶宇
北方交通 2023年2期
羅 恒,曹樂樂,金宗毅,李明穎,孟慶宇
(1.大連工業大學 大連市 116000;2.中鐵建電氣化局集團軌道交通器材有限公司 常州市 213000)
0 引言
基于計算機視覺的車道線檢測是自動駕駛領域中的一個重要組成部分。溫云燕等[1]通過小車仿真實驗驗證圖像處理算法在車道檢測中的效果,由于車道模型簡單,忽視了行人、車輛等客觀因素帶來的干擾,不具有很強的說服性。張勇等[2]基于RGB圖像灰度處理后進行Canny邊緣檢測,這種檢測在復雜路況,不能準確識別車道線并排除無關因素影響。王文豪等[3]通過攝像機采集圖像并對原始圖像進行了標定,獲得無畸變圖像后進行圖像處理,但在ROI區域的劃定上模棱兩可,如果在復雜路況不能快速選定特征點時,容易造成檢測異常,不能準確識別車道。李軍等[4]使用速度更快的漸進概率Hough變換(PPHT)識別車道線,卻難以避免車道線的誤檢和漏檢。但是基于機器學習的方法計算復雜且需要依賴大量樣本數據,考慮到實際路況復雜多變,計算成本太高,難以滿足自動駕駛對車道信息的及時處理和實時反饋需要[5]。
基于上述車道檢測研究現狀,采用基于OpenCV函數庫的算法對車道線進行檢測,采用的面積和外接矩形過濾算法可以達到對車道線精準檢測的目的,此方法可以為自動駕駛領域內的車道線檢測提供更加便捷高效的檢測路徑。
1 車道線識別檢測的基本步驟
車道線檢測主要包括車道線圖像采集,圖像的預處理,圖像特征區域的Canny邊緣檢測,霍夫直線檢測[6]和直線擬合等步驟,最終實現車道線的在線識別與檢測。以行車記錄儀拍攝為素材進行車道線檢測,使用OpenCV函數庫中的VideoCapture.read()函數來讀取視頻,再通過簡單的設置獲得車道線實時圖像。
2 車道線預處理
由于在獲得的車道線實時圖像中包含許多噪聲和無關特征,需要對原始圖像進行預處理操作,如圖1所示,經過預處理的圖像可以有效地消除圖像中無關信息,提高車道線檢測的準確性。
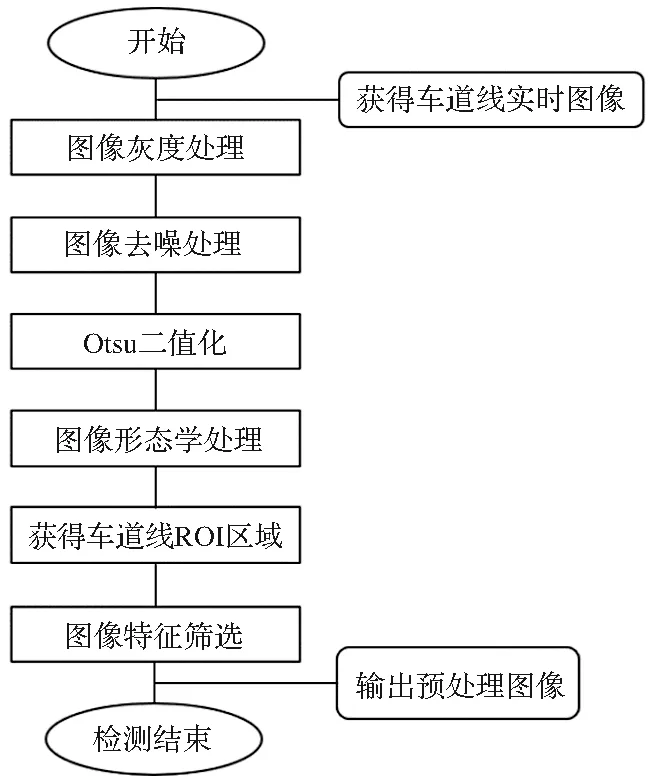
圖1 車道線預處理流程圖
2.1 圖像的灰度化處理
彩色圖像中的每一個像素點都是由R、G、B三個分量共同決定。而灰度圖像是一種特殊的彩色圖像,它只有一個通道256個灰度等級。經過灰度處理的彩色圖像,可以最大限度簡化圖像處理的工作量,還能保證圖像的基本信息不丟失。目前灰度化處理常用的方法有以下幾種:
最大值法 Gary(i,j)=max{R(i,j),G(i,j),B(i,j)}
(1)
平均值法 Gary(i,j)=[R(i,j)+G(i,j)+B(i,j)]/3
(2)
加權平均法 Gary(i,j)=0.3R(i,j)+0.59G(i,j)+0.11B(i,j)
(3)
由于最大值法獲得的灰度圖像亮度較高,會丟失很多圖像細節,而經過平均值法獲得的灰度圖像會丟失一部分亮度信息,又考慮到人眼對綠色比較敏感,對藍色不太敏感,所以選用加權平均法進行圖像的灰度化處理,如圖2所示。

圖2 加權平均法灰度圖
2.2 圖像的去噪處理
圖像在數字化和成像過程中會受到外界環境的影響產生噪聲,這些噪聲會模糊圖像特征,在進行車道線檢測前,需要對圖像進行降噪處理。空間域局部濾波器是圖像最為常用的一類降噪濾波器。這類濾波器比較經典的濾波算法有均值濾波、高斯濾波、中值濾波和雙邊濾波,其中均值濾波和高斯濾波[7]為線性濾波,中值濾波和雙邊濾波為非線性濾波。
均值濾波的不足是圖像在去噪的同時也破壞了圖像的細節,使圖像變得模糊。高斯濾波器的不足是在降噪的同時也會對圖像邊緣信息進行平滑處理。中值濾波是一種非線性濾波,缺點是易造成圖像的不連續性。
選用既能平滑降噪,又能保存邊緣信息的雙邊濾波進行圖像去噪。雙邊濾波是一個非線性濾波,采用的是加權求和的方法,其權值矩陣由一個與空間距離相關的高斯函數和一個與灰度距離相關的高斯函數相乘得到,如圖3所示。

圖3 雙邊濾波降噪圖
空間域核:由像素位置歐式距離決定的模板權值ωd,p(k,l)為模板窗口中心點坐標,q(i,j)為模板窗口其他系數坐標,σd為高斯函數標準差。
(4)
值域核:由像素值的差值決定的模板權值ωr,f(k,l)為模板窗口中心坐標,f(i,j)為模板窗口其他系數坐標,σr為高斯函數標準差。
(5)
將上述兩個模板相乘就得到了雙邊濾波器的模板權值, 因此,雙邊濾波原理的數學表達式為:
(6)
2.3 Otsu二值化
圖像經過雙邊濾波去噪后,為了更好地提取圖像特征,需要對圖像進行二值化處理,傳統圖像分割方法有基于閾值、邊緣、區域、圖論等4類算法,選用閾值分割算法中的Otsu算法[8],背景和前景的分界值就是我們要求出的閾值。遍歷不同的閾值,計算不同閾值下對應的背景和前景之間的類內方差,當類內方差取得極大值時,此時對應的閾值就是大津法所求的閾值,如圖4所示。

圖4 Otsu二值化圖像
最佳閾值的評估標準稱為類間方差,在閾值T下的類間方差公式為:
(7)

2.4 圖像的形態學處理
通過Otsu二值化處理后,為了更好地進行特征檢測,需要對圖像進行形態學處理,常用的形態學算法有腐蝕、膨脹、開運算、閉運算、頂帽等。選用形態學處理中的開運算來優化圖像特征,開運算先進行腐蝕增加黑色面積,后進行膨脹增加白色面積。經過形態學處理的圖像會過濾掉一些孤立的區域,減少了特征檢測的干擾,增大了特征檢測的準確性。
2.5 獲得車道線ROI區域
經過形態學處理后,為了排除道路兩旁車輛、樹木以及前方車輛的干擾,需要劃定ROI[9](region of interest)區域剔除無關信息,作為后續檢測算法的圖像輸入。
目前在車道檢測領域的ROI圖像分割方法主要是固定比例(區域法),該方法是依據行車圖像中兩旁車輛、樹木等分布情況觀察和總結,采用某一種固定比例(區域)對車道線圖像進行分割。例如文獻[10]采用的是靠近圖像底部的2/3區域作為檢測的ROI區域。根據行車記錄儀圖像特點,將目標區域縮小為上窄下寬的梯形區域,這種選擇更貼合實際車道在圖像中的位置,檢測性能也更好,見圖5。
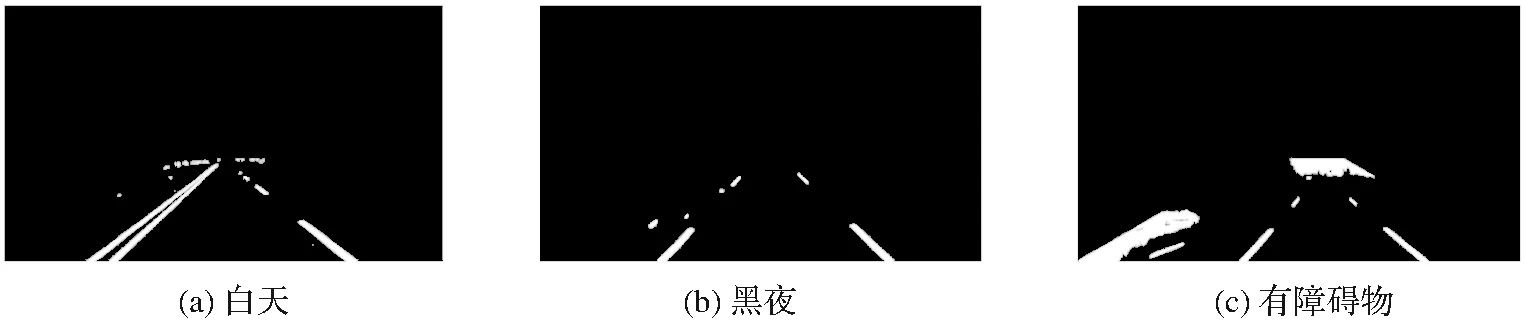
圖5 ROI區域掩膜圖
2.6 圖像特征篩選
在獲得車道線ROI區域后,為了更好地獲得特征區域,篩選掉其它因素干擾,采用面積過濾、外界矩形過濾等方法,篩選出需要的特征區域。
在提取特征目標時將面積較小的區域屏蔽掉,采用OpenCV的這個函數庫中的ContourArea函數求面積,這個面積指的是連通域輪廓線所包含的區域的面積,輪廓線包含N個頂點,這些頂點的位置是對應像素的中心點,面積就是從這些個中心點開始算,如圖6所示,每個方格代表一個像素,圖示彩色部分面積為3.5個像素單位。通過多次圖像處理驗證,得出過濾面積小于等于5個像素單位面積時,就能很好地過濾較小面積,不會對特征區域造成干擾。
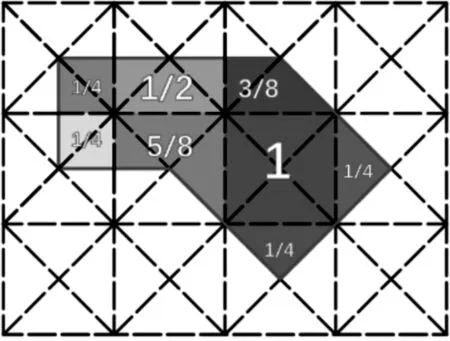
圖6 像素面積原理圖
經過面積過濾后,可以把形態學操作和ROI區域未處理掉的細小區域過濾,對于面積較大的非特征區域過濾還需要考慮其它方式,如圖7所示。結合實際情況,對ROI區域內的圖像特征進行外接矩形,判定靠近ROI圖像左邊區域的矩形左上角頂點的x坐標,靠近ROI圖像右邊區域的矩形右上角頂點的x坐標,以及外接矩形中心位置x坐標與ROI圖像寬度之間的關系。一般情況下,進行ROI區域劃分。左右兩側有車輛行駛時,獲得的干擾區域會靠近ROI圖像兩側邊緣,調整閾值,選取左側外接矩形x坐標落在[0,1/6 width],選取右側外接矩形x坐標落在[5/6 width,1],左側外接矩形中心點坐標落在[0,1/5 width],右側外接矩形中心點坐標落在[4/5 width,1],width為ROI圖像像素寬度,同時考慮外接矩形的寬高比是否大于1來過濾,如圖8所示。
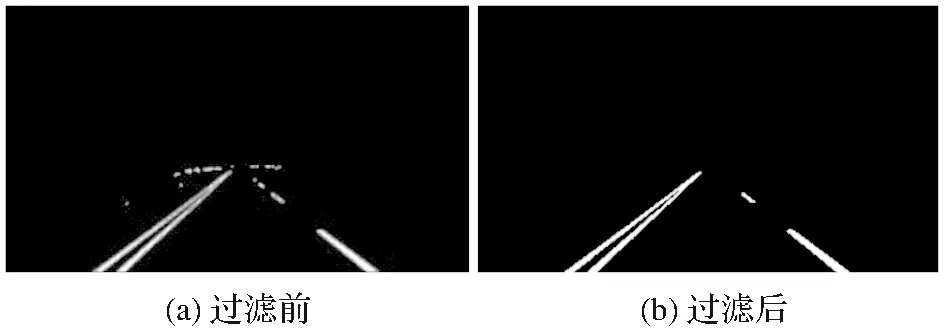
圖7 面積過濾前后對比圖

圖8 外接矩形過濾前后對比圖
3 Canny邊緣檢測
對車道線圖像進行預處理后,需要對預處理后的圖像進行邊緣檢測,選用抗干擾性強、計算復雜度低的Canny邊緣檢測算子。
Canny邊緣檢測算法主要步驟有以下四步:
(1)使用高斯濾波使圖像平滑,濾除圖像中存留噪聲。
(2)用Sobel算子計算,得到邊緣及其方向。
(3)對梯度幅值進行非極大值抑制,細化邊緣。
(4)用雙閾值檢測算法消除偽邊緣,連接邊緣。
4 霍夫直線檢測及圖像融合
經過Canny邊緣檢測后的圖像,只能得到圖像中的一些邊緣像素點,需要對這些邊緣點進行篩選,考慮到車道線均為直線段,采用霍夫直線檢測篩選。
理論上直線可以在直角坐標系中表示,也可以在極坐標系中表示,但是當直線接近垂直時,直線斜率會趨于無窮大,為了克服這個困難,選擇在極坐標下表示直線。
ρ=xcosθ+ysinθ
(8)
式(8)中(x,y)為直角坐標系直線上一點,ρ為原點到直線的距離,θ為原點到直線距離與x軸的夾角。在極坐標系中給定兩個參數ρ和θ,就代表直角坐標系中的一條直線。而對于直角坐標系中的某一點來說,其ρ和θ的值不是固定的,因為過此點的直線可能有很多條,每條的ρ和θ的值也可能不同,因此,直角坐標系中的一個點對應參數方程中的一條曲線,如圖9所示。
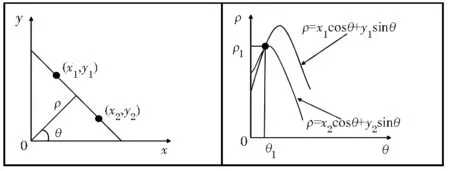
圖9 霍夫變換原理圖
經過變換,圖像空間中的每一個點(x,y)都映射為極坐標中的一條正弦曲線,且圖像空間中共線的點在極坐標系中的正弦曲線相交于一點。如果交于一點的曲線的數量超過了閾值,則認為是一條直線。選用OpenCV函數庫中的HoughLinesP函數檢測圖像中的直線。
根據斜率,將左邊和右邊的點分別用最小二乘法線性擬合,把斜率絕對值小于0.5的線舍去,將檢測到的線分為左右兩組,并在與原圖像相同尺寸、相同通道的掩膜圖像中畫出車道線,最后用OpenCV函數庫中的addWeighted函數把掩膜圖像與原圖像進行合并,完成車道線實時檢測,如圖10所示。
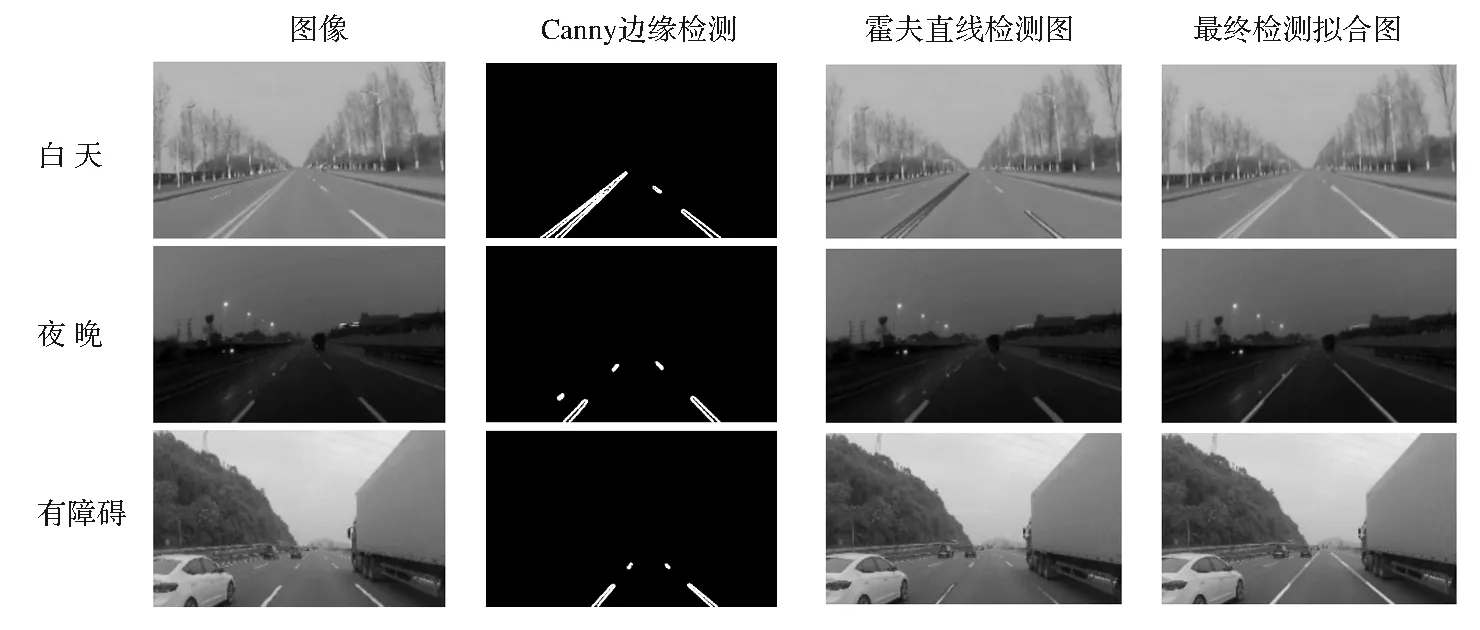
圖10 車道線檢測圖
最后將上述圖像處理與檢測的過程封裝在一個函數里,對每一幀圖像都執行封裝函數,得到的返回值是處理后的圖像,這樣用行車記錄儀拍攝的視頻就完成檢測車道線的任務。
5 結論
車道線檢測技術是自動駕駛的關鍵技術之一,使用Python語言和調用OpenCV庫,在Pycharm開發環境中編寫,通過代碼編譯,算法整合,最終實現了在白天、黑夜、有障礙等環境中的成功檢測與準確識別,達到了此次研究的目的,為自動駕駛領域內的車道線檢測提供更加便捷高效的方法。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44