臥式下肢康復機器人訓練模式設計與軌跡規劃
2023-02-28 16:09:54趙金鵬韓建海李向攀郭冰菁
智能計算機與應用 2023年11期
趙金鵬,韓建海,2,李向攀,2,郭冰菁,2
(1 河南科技大學機電工程學院,河南 洛陽 471003;2 河南科技大學河南省機器人與智能系統重點實驗室,河南 洛陽 471023)
0 引 言
由于人口老齡化和人們生活節奏的加快導致腦卒中患者日漸增多,超過70%的腦卒中引起的下肢運動功能障礙患者需要進行運動康復訓練,然而國內專業康復醫師不足5 萬,這就導致很多患者無法及時接受有效的運動康復治療[1-2]。 同時,傳統的康復治療效果很大程度上依賴于康復醫師的個人經驗,治療的力度和效果難以保證[3]。 因此,將現代機器人技術與康復醫學相結合,研制康復醫療機器人來協助康復醫師對患者進行康復治療成為了康復領域的研究熱點[4-6]。
下肢康復機器人根據其結構不同,可分為外骨骼式和末端牽引式兩大類[7]。 其中,外骨骼式機器人普遍體積較大、穿戴不便且價格較為昂貴,如朱志偉等學者[8]研發的下肢外骨骼機器人。 末端牽引式機器人具有結構簡單、體積小、操作方便且康復效果較好等一系列優點,因此國內外研究人員做了大量的研究[9]。 在國外,Swortech SA 公司推出的Motion Maker 坐臥式下肢康復機器人可以對髖膝踝三個關節進行康復訓練[10]。 在國內,王洪波團隊設計的坐式下肢康復機器人,結構上采用了空間四自由度串并聯的方式,可實現對髖、膝關節的協同康復[11]。 但這些康復機器人所能實現的康復動作有限,在一定程度上限制了機器人的適用范圍。
為滿足人體下肢髖膝踝關節的康復訓練以及柔順性需求,本文將康復醫學理論與現代機器人技術相結合提出了臥式下肢康復機器人,并根據患者的個性化需求設計了多種康復訓練模式;運用S 形軌跡規劃原理對康復軌跡進行實時仿真,同時結合實驗驗證機器人結構以及康復模式設計的合理性。
1 機器人本體結構設計
臥式下肢康復機器人主要由基座、大腿部、小腿部與腳部等組成,其三維模型如圖1 所示。 圖1 中,(a)為正視圖,(b)為俯視圖。 腳部在空間中的位置由髖關節和膝關節的運動確定,腳部在空間中的姿態由踝關節的運動決定,并且各個關節都是通過交流伺服電機搭配減速器來驅動的[12],髖、膝和踝三個關節的配合運動可實現機器人腳部末端在三維空間中的運動。

圖1 機器人三維模型圖Fig. 1 Three dimensional model of the robot
電機1 和減速器1 配合使用被安裝在基座上,電機1 和減速器1 的旋轉帶動髖關節進行運動,并配備扭矩傳感器實時監測軸1 的扭矩情況。 同時為了減小機器人的體積,使運行過程更加平穩安全,電機2、3、4 都采用帶傳動將動力傳遞給減速器、繼而帶動關節轉動的方式。 電機2 安裝在機器人大腿上,其旋轉運動經過帶傳動傳遞給減速器2,從而帶動膝關節進行擺動。 電機3 安裝在小腿上,電機4通過電機安裝支架安裝在腳旁。 減速器3 與減速器4 相互垂直安裝,電機3 的旋轉運動通過帶傳動傳遞給減速器3、從而帶動踝關節進行跖屈和背屈運動,并同時確定人體腳部在空間中的姿態,電機4 和減速器4 控制踝關節的內收外展和人體下肢的內旋和外旋。 同時,在腳跟部設計安裝了一個柔性末端,其三維圖如圖2 所示,該柔性末端水平面由4 根導桿和4 根彈簧組成,垂直面由2 根導桿和2 根彈簧組成,從而在機械上保證康復過程的被動柔順性。制作的物理樣機如圖3 所示。
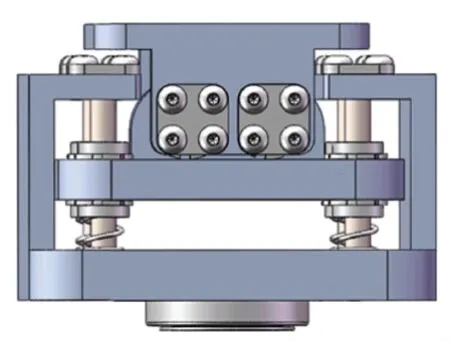
圖2 柔性末端三維圖Fig. 2 Three dimensional drawing of flexible end
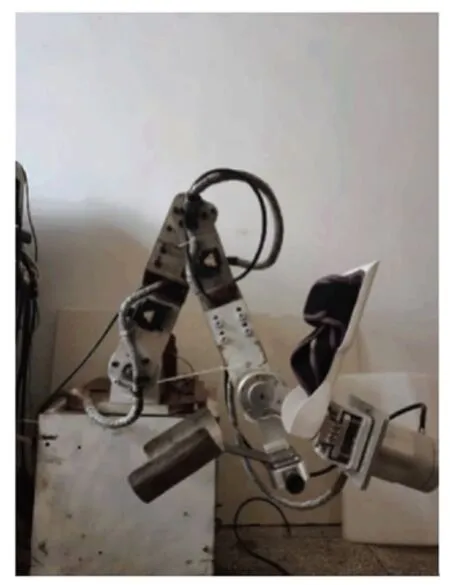
圖3 機器人物理樣機圖Fig. 3 Physical prototype of the robot
機器人通過伺服電機驅動來使下肢功能障礙患者完成不同的康復訓練模式,采用北京靈思創奇科技有限公司的半實物仿真平臺作為機器人的控制系統,進行康復機器人的實時控制和數據采集。
2 運動學建模分析
采用D-H 參數法確定各個關節變量之間的關系,并建立機器人的連桿坐標系,如圖4 所示。 旋轉關節θ1定義為基座水平方向與大腿的夾角,旋轉關節θ2定義為大腿與小腿的夾角,旋轉關節θ3定義為小腿與水平面的夾角。

圖4 機器人連桿坐標系Fig. 4 Robot linkage coordinate system
為確保所設計的臥式下肢康復機器人滿足大多數患者的使用要求,結合正常成年人下肢各部分尺寸[13]與機構運動學原理,設計了各連桿的具體參數,取L1=360 mm,L2=360 mm,同時為保證康復訓練過程中的安全性,對旋轉關節變量θ1和θ2的取值范圍分別限制為30°~75°和40°~100°,D - H參數見表1。
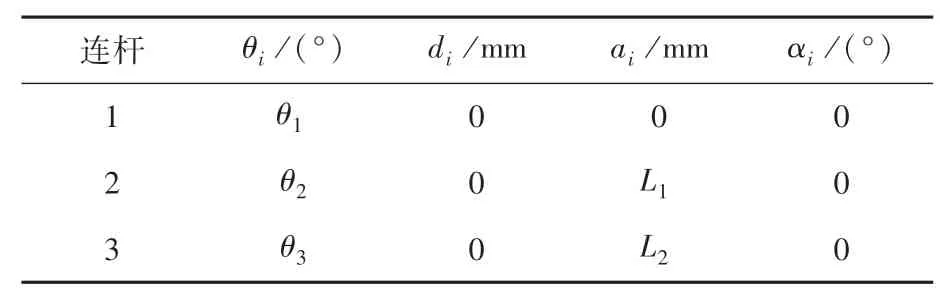
表1 機器人D-H 參數表Tab. 1 D-H parameters of the robot
對所設計的臥式下肢康復機器人進行運動學分析,探究機器人末端腳部位姿與各個旋轉關節變量之間的聯系[14]。 由于在本結構中踝關節只決定末端的姿態,所以要單獨考慮,因此只需求出腳部的位姿矩陣0T2:
其中,式(1) cθ =cosθ,sθ =sinθ。
根據上式計算得到的齊次變換矩陣0T2,因此機器人末端位置為:
機器人的空間位姿矩陣R為:
通過對機器人運動學求逆解可得:
將在Solidworks 軟件中繪制的三維模型裝配實體使用Simscape Multibody 工具箱導入到Matlab 的Simulink 中搭建臥式下肢康復機器人模型,如圖5所示。 通過設置各個關節的彈性以及阻尼來更好地模擬臥式下肢康復機器人的實際工作情況,盡可能地使仿真更加貼合實際。

圖5 下肢康復訓練機器人機構模型圖Fig. 5 Mechanism model of lower limb rehabilitation training robot
3 康復訓練模式的設計
人體下肢的一切復雜運動都主要由髖、膝、踝三個關節的復合運動構成,由于下肢功能障礙患者的患病形式多種多樣,所以需要設計出既可以滿足各種下肢康復需求并且又具有一定針對性、個性化的康復訓練模式。 本文根據成年人人體下肢髖、膝、踝關節的運動范圍(見表2),結合相關康復護理和機器人技術特點,設計出了多種躺臥姿勢下的人體下肢康復訓練模式。

表2 人體下肢髖膝踝關節的運動范圍Tab. 2 Range of motion of human lower limb hip,knee and anklejoints
一般定義髖關節的角度為人體大腿的軸線與其水平面之間的夾角,膝關節的角度為人體大腿軸線與其小腿軸線之間的夾角,踝關節的角度分布在空間中的2 個相互垂直的平面,分別為跖屈、背屈的角度和內收、外展的角度。 在實際康復訓練中,要根據每位患者的個性化需求選擇各個關節合適的訓練角度,以達到理想的康復效果。
臥姿下空中踢球訓練模式如圖6 所示,主要針對髖關節的康復訓練,訓練開始時保持膝關節和踝關節角度不變,在可活動范圍內逐漸加大髖關節的角度。 該模式有助于促進人體腿部血液循環,并訓練人體髖關節的靈活度,一般訓練角度為40°~85°之間。

圖6 踢球訓練模式Fig. 6 Kicking training mode
臥姿下踢腿訓練模式如圖7 所示,主要針對膝關節的康復訓練,訓練開始時首先將髖關節抬升至90°保持不變,并同時保持踝關節不動,然后增加膝關節的訓練角度和力度來達到訓練膝關節的目的。這種訓練方法有助于提升患者大腿部位股四頭肌的力量,并能夠訓練膝關節的靈活度,一般膝關節的訓練角度在40°~110°。
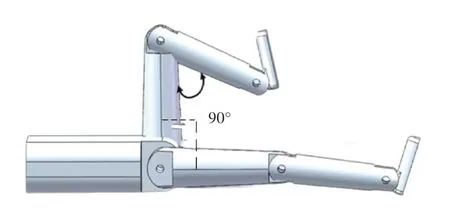
圖7 踢腿訓練模式Fig. 7 Kick training mode
腳踝擺動訓練模式如圖8 所示,主要針對踝關節的康復訓練,是在髖關節和膝關節的訓練角度保持不變的前提下,增加踝關節的訓練角度,使其在矢狀面內繞額狀軸進行跖屈和背屈訓練,在水平面上繞著小腿的軸線進行內收和外展訓練。 這樣的訓練有助于促進患者踝關節處的血液循環,一般踝關節跖屈和背屈訓練角度分別為0°~50°和0°~20°,內收和外展訓練角度為0°~45°和0°~50°。 跖屈背屈和內收外展訓練可同步進行,實現踝關節的立體式康復訓練。
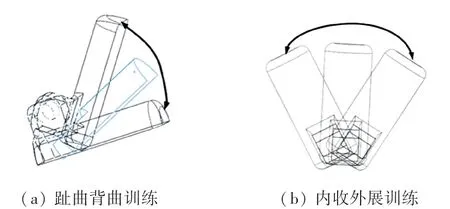
圖8 腳踝擺動訓練模式Fig. 8 Ankle swing training mode
空中蹬自行車訓練模式如圖9 所示,主要針對髖關節和膝關節的復合訓練,訓練開始時由于腳跟部設計安裝有柔性末端保證被動柔順,因此可不考慮踝關節訓練角度,然后只增加膝關節和髖關節的訓練角度和力度使踝關節中心繞空中某一圓心進行圓周運動,以此達到髖關節和膝關節同步訓練的目的,有助于增加康復患者的髖膝配合協調能力。

圖9 空中蹬自行車訓練模式Fig. 9 Training mode of cycling in the air
當然也可通過將上述各個模式相互結合實現多個模式的復合訓練,提高康復訓練效率,使患者的下肢得到全方位的康復治療。
4 雙關節與多關節的軌跡規劃仿真
機器人的運動規劃主要包括幾何路徑規劃(Way)和軌跡規劃(Time)兩大部分,其中幾何路徑規劃是指規劃連接位置A和位置B間序列點或曲線的策略,在機器人中主要表現為關節點到點運動、直線點到點運動、圓弧點到點運動和樣條點到點運動四種;而軌跡規劃是規劃機器人末端在空間中的路徑以及在該路徑上各個中間點的速度和加速度等。軌跡規劃算法主要分為多項式規劃、三角函數規劃等,但由于上述軌跡規劃算法存在沒有最大速度和最大加速度限制的問題,會造成速度、加速度產生突變,從而產生沖擊,因此本文將結合設計的康復治療模式采用S 形軌跡規劃(七段規劃),以保證達到理想的康復效果[15]。
4.1 雙關節軌跡規劃及仿真分析
蹬自行車、抬腿等一系列人們下肢基礎動作的實現都依賴于髖關節和膝關節的緊密參與,因此針對下肢功能障礙患者的髖膝關節康復所設計的康復訓練動作(見圖9),在下肢康復機器人的安全工作空間內,仿照蹬自行車的運動模式,規劃平面畫圓的末端運動軌跡。
把末端畫圓軌跡代入到S 形軌跡規劃算法(七段規劃)中,并將算出的數據結果輸入在Simscape Multibody 上搭建的機器人模型中進行仿真。 初步設置仿真時長為15 s,圓心坐標為(300,300),半徑為180 mm,髖關節和膝關節的初末速度、初末加速度皆為0 rad/s、機器人運行的整個過程中最大速度為0.4 rad/s、最大加速度為0.3 rad/s2、最大加加速度為0.3 rad/s3,得到機器人髖膝關節的角位移、角速度和角加速度曲線如圖10 所示。 從圖10 可以看出,臥式下肢康復機器人在進行髖膝關節康復訓練時角位移曲線轉折處平滑、無突變現象。 角速度大致可分為7 段,轉折處過渡平穩,無尖銳突起點,證明運動過程平穩,患者髖膝關節康復治療體驗效果較好。
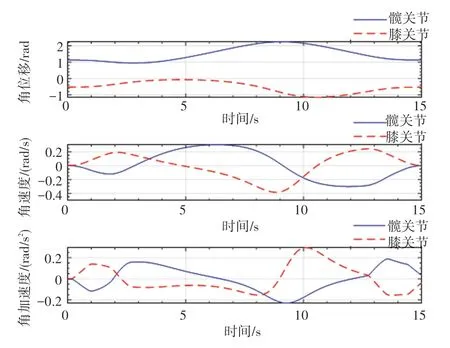
圖10 圓軌跡髖膝關節曲線圖Fig. 10 Curve of hip and knee joint in circular track
4.2 多關節的軌跡規劃及仿真分析
奔跑、跳躍等一系列人體下肢動作都不會僅僅只依靠2 個關節,而是由多個關節相互配合、相互協調組成的復合運動。 因此,只針對髖膝關節的康復訓練并不能確保對下肢功能障礙患者的康復效果。現根據所設計的臥式下肢康復訓練機器人的結構特點,結合所設計的人體下肢康復訓練模式,在機器人的安全運動空間內,進行髖、膝、踝三關節相結合的康復軌跡規劃。 規劃髖膝關節平面畫圓軌跡輔以踝關節內收外展訓練,這樣可以實現對髖膝踝關節的全方位一體化康復,進而提升康復治療效果。
利用S 形軌跡規劃對髖、膝、踝關節運動軌跡進行計算,同時在Simulink 中搭建的機器人模型上進行仿真。 初步設置仿真時間15 s,運動過程中髖、膝、踝關節的起始速度和終止速度皆為0 rad/s、最大速度分別為0.4 rad/s、0.4 rad/s 和0.2 rad/s、最大加速度分別為0.3 rad/s2、0.3 rad/s2和0.3 rad/s2、最大加加速度分別為0.4 rad/s3、0.3 rad/s3和0.4 rad/s3,得到機器人髖膝關節的角位移、速度和加速度曲線,如圖11 所示;踝關節的角位移、速度和加速度曲線,如圖12 所示。 從圖11、圖12 中可以看出,髖、膝、踝關節的角位移和角速度曲線轉折處較為平滑,證明仿真過程中機器人運動平穩。
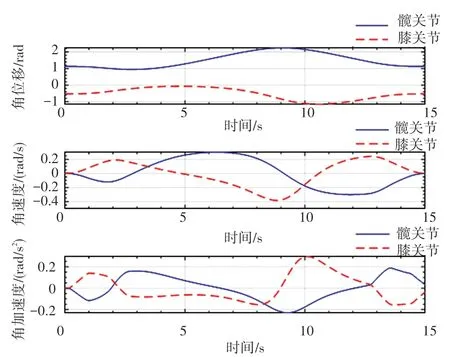
圖11 髖膝關節曲線圖Fig. 11 Curve of hip and knee joint
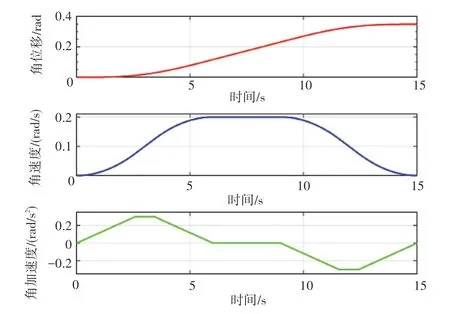
圖12 踝關節曲線圖Fig. 12 Curve of ankle joint
5 實驗與分析
本文以臥式下肢康復機器人為研究對象,實驗時對正常人的左側腿部進行髖膝關節末端的平面畫圓康復訓練實驗,如圖13 所示。 實驗對象為中國男性,身高170 cm,年齡25 歲,經實際測量,大腿長465 mm,小腿長369 mm。 實驗過程中將測試者小腿固定在康復機器人的腿部支架上,腳固定在腳踏板中。 將S 形軌跡規劃算法得到的數據作為期望的康復軌跡數據,2 個電機編碼器采集到的數據作為實際康復軌跡數據,繪制康復機器人髖膝關節的期望位置與實際位置,如圖14 所示。
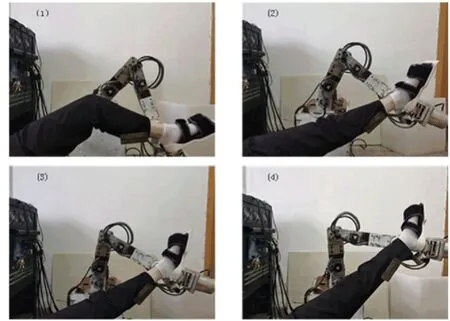
圖13 髖膝踝關節康復實驗Fig. 13 Hip,knee and ankle rehabilitation experiment
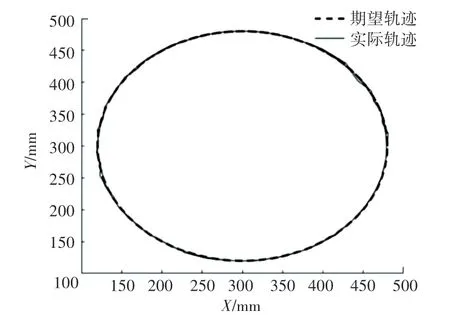
圖14 末端畫圓跟蹤曲線Fig. 14 Tracking curve of drawing a circle at the end
從圖14 可以看出,在末端畫圓的康復實驗中所得到的各個時刻的實際康復軌跡與利用S 形規劃得到的期望軌跡基本吻合,康復訓練過程機器人運動平穩,無明顯扭拽現象,實驗全程測試者感覺舒適,證明了臥式下肢康復機器人結構設計合理、利用S形軌跡規劃切實可行。
6 結束語
將康復醫學與現代機器人技術相結合所設計的臥式下肢康復訓練機器人,解決了現有機器人缺乏柔順性、結構繁雜等問題。 通過對該機器人的結構、運動學和髖膝踝關節運動范圍的分析,并結合現代康復理論,設計了多種康復訓練模式;將S 形軌跡規劃原理與所設計的康復訓練模式相結合,在Simulink 中進行雙關節和多關節的仿真,并通過實驗驗證了康復機器人結構的合理性及康復模式的科學性,為下一步進行人機交互的主動康復策略研究奠定了基礎。
猜你喜歡
公民與法治(2020年11期)2020-07-25 02:02:06
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國工程咨詢(2016年4期)2016-02-14 07:28:28
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45