基于改進(jìn)蟻群算法的農(nóng)村運(yùn)輸路徑規(guī)劃
2023-02-28 16:10:06黃二強(qiáng)代永強(qiáng)
智能計(jì)算機(jī)與應(yīng)用 2023年11期
黃二強(qiáng),代永強(qiáng),劉 歡
(甘肅農(nóng)業(yè)大學(xué)信息科學(xué)技術(shù)學(xué)院,蘭州 730000)
0 引 言
隨著國(guó)家對(duì)環(huán)境保護(hù)的重視,農(nóng)業(yè)得到了飛速發(fā)展,農(nóng)產(chǎn)品的產(chǎn)量也有了全面提升,需要良好的交通運(yùn)輸路徑來激活農(nóng)村經(jīng)濟(jì)。 因?yàn)閲?guó)內(nèi)地形地貌復(fù)雜多樣,各地的農(nóng)村之間相距較遠(yuǎn)、且農(nóng)產(chǎn)品種類和產(chǎn)量也不相同,所以就需要規(guī)劃運(yùn)輸路徑的軟件,來幫助規(guī)劃路徑,車輛運(yùn)輸路線規(guī)劃已經(jīng)變得越來越重要。 相對(duì)于常規(guī)的路徑規(guī)劃算法,首先,本文中的算法彌補(bǔ)了在運(yùn)輸?shù)恼麄€(gè)環(huán)節(jié)中花費(fèi)在農(nóng)村收購點(diǎn)等待農(nóng)產(chǎn)品的時(shí)間,因?yàn)榈乩碓颍召徤痰竭_(dá)農(nóng)村收購點(diǎn)后,因?yàn)椴煌貐^(qū)的果園或農(nóng)田距生活區(qū)較遠(yuǎn),有的地勢(shì)陡峭、有的地質(zhì)松散、比較危險(xiǎn),農(nóng)民也會(huì)在不同的時(shí)間去采摘農(nóng)產(chǎn)品,造成收購商額外花費(fèi)的時(shí)間不同。 而常規(guī)的路徑規(guī)劃算法中只注重車輛調(diào)度花費(fèi)的時(shí)間。 其次,本文中改進(jìn)的蟻群算法融合退火算法后,提高了蟻群算法跳出局部最優(yōu)的能力和收斂速度。 再次,通過融合蜜獾算法,在計(jì)算2 個(gè)收購點(diǎn)之間的距離時(shí),本文考慮到農(nóng)村地形影響因素,引入蜜獾算法在挖掘階段的心形模型來計(jì)算兩點(diǎn)間的距離,此模型更適合計(jì)算農(nóng)村收購點(diǎn)之間的距離,其距離與實(shí)際路程更接近。 而常規(guī)算法是計(jì)算連點(diǎn)間直線距離,在計(jì)算山區(qū)中2 個(gè)農(nóng)村之間的距離時(shí),計(jì)算的直線距離與實(shí)際路程比本文中的要差。 本文選擇甘肅省若干個(gè)村鎮(zhèn)進(jìn)行路徑規(guī)劃,利用改進(jìn)的蟻群算法幫助收購商尋找一條最佳的運(yùn)輸路徑。 運(yùn)輸路徑規(guī)劃問題可歸于TSP[1](traveling salesman problem)問題,在解決TSP 問題上,可用精確算法[2]或啟發(fā)式搜索算法[3],如分層遞進(jìn)的改進(jìn)聚類蟻群算法[4]或者人工智能算法,如模擬退火算法[5]、蟻群算法[6]、禁忌搜索算法[7]、雞群算法[8]、粒子群算法[9]、蜂群算法[10]、麻雀搜索算法[11]以及遺傳算法[12]等。 在本文中用改進(jìn)的蟻群算法來規(guī)劃車輛運(yùn)輸路徑。 基于原始蟻群算法中跳出局部最優(yōu)的能力低[13]、收斂速度慢[14]、優(yōu)化效率低[15]的問題,改進(jìn)的算法中,首先增加螞蟻體重突變的因素,可以提高蟻群的多樣性,從而提高蟻群算法跳出局部最優(yōu)的能力。 在螞蟻體重突變的過程中,通過結(jié)合退火算法的概率計(jì)算方法來得到當(dāng)前運(yùn)動(dòng)螞蟻的體重;其次,增加目標(biāo)地點(diǎn)的時(shí)間權(quán)重參數(shù),可通過設(shè)置目標(biāo)點(diǎn)的時(shí)間權(quán)重值更快、更準(zhǔn)確地找出下一個(gè)地點(diǎn),提高了蟻群算法的收斂速度。 實(shí)驗(yàn)結(jié)果表明,改進(jìn)的蟻群算法有更好的尋優(yōu)能力。
1 蟻群算法
蟻群算法是Dorigo 等學(xué)者[16]在二十世紀(jì)九十年代提出的一種新型的模擬進(jìn)化算法[17]。 通過研究發(fā)現(xiàn)螞蟻之間傳遞信息是通過一種稱為信息素的物質(zhì),當(dāng)螞蟻在尋找食物時(shí)通過這種物質(zhì)進(jìn)行信息交互的。 螞蟻在覓食的過程中會(huì)在經(jīng)過的路徑上留下信息素,并且螞蟻也能夠感受到信息素,螞蟻會(huì)通過判斷信息素來指導(dǎo)自己運(yùn)動(dòng)的方向:若無信息素則按照隨機(jī)性前進(jìn),若有信息素、則根據(jù)信息素的強(qiáng)度來確定自己的運(yùn)動(dòng)方向。 螞蟻會(huì)選擇信息素、濃度高的方向運(yùn)動(dòng)。 由于大量螞蟻組成的蟻群集體行為表現(xiàn)出一種信息正反饋現(xiàn)象,在某一路徑上走過的螞蟻越多,則后來者選擇該路徑的概率就越大。蟻群算法相對(duì)于其他的一些算法很有優(yōu)勢(shì),文獻(xiàn)[18]中利用Matlab 對(duì)蟻群算法和遺傳算法對(duì)TSP的求解進(jìn)行了研究對(duì)比,研究發(fā)現(xiàn),在若干個(gè)城市里,無論兩地之間距離多遠(yuǎn),蟻群算法比遺傳算法更優(yōu)。 在文獻(xiàn)[19] 中設(shè)計(jì)了一種包含改進(jìn)PRM(probabilistic road map)算法和蟻群算法的一種融合算法,可以一次規(guī)劃出多個(gè)目標(biāo)點(diǎn)的路徑,但是所規(guī)劃出來的路徑具有隨機(jī)性。 文獻(xiàn)[20]中將蟻群算法和粒子群算法對(duì)比,蟻群算法的可靠性和精確度高、適應(yīng)性強(qiáng)。在該算法中,將m只螞蟻隨機(jī)性地放在了n個(gè)城市里,全部的路徑(i,j) 上信息素的初始值△τij(0)=常數(shù)(C),之后螞蟻k(1,…,m)在t時(shí)刻就按照其轉(zhuǎn)移概率來選擇出下一個(gè)節(jié)點(diǎn)。
2 模擬退火算法
模擬退火算法(Simulated Annealing,SA)最早的思想是由N. Metropolis 等學(xué)者[21]于1953年提出[21]。 1983年,Kirkpatrick[22]成功地將退火思想引入到組合優(yōu)化[23]領(lǐng)域。 這是基于Monte-Carlo[24]迭代求解策略的一種隨機(jī)尋優(yōu)算法[25]。 王光等學(xué)者[26]提出的算法進(jìn)行可靠性模型參數(shù)求解,具有解的全局性好、收斂速度快等優(yōu)點(diǎn)。 其出發(fā)點(diǎn)是基于物理中固體物質(zhì)的退火過程與一般組合優(yōu)化問題之間的相似性。 本質(zhì)思想為以概率接受新狀態(tài):在溫度為T時(shí),設(shè)當(dāng)前狀態(tài)為i,新狀態(tài)為j,若Ej <Ei,則接受j為當(dāng)前狀態(tài);否則,若概率大于[0,1) 區(qū)間的隨機(jī)數(shù),則仍接受狀態(tài)j為當(dāng)前狀態(tài);若不成立,則保留狀態(tài)i為當(dāng)前狀態(tài)。p =:在高溫下,可接受與當(dāng)前狀態(tài)能量差較大的新狀態(tài);在低溫下,只接受與當(dāng)前狀態(tài)能量差較小的新狀態(tài)。 該式中的K為玻爾茲曼常量,是熱力學(xué)的一個(gè)基本常量,數(shù)值為1.380 649×10-23J/K。
3 蜜獾算法
蜜獾算法(Honey Bavdger Algorithm,HBA)是2022年提出的一種元啟發(fā)式優(yōu)化算法。 該算法的靈感來源于蜜獾的覓食行為,蜜獾會(huì)通過挖掘階段和采蜜階段尋找食物,還會(huì)根據(jù)氣味強(qiáng)弱接近獵物捕食。 該算法具有開發(fā)能力強(qiáng)、收斂速度快等特點(diǎn),但探索能力有所不足。 研究發(fā)現(xiàn),蜜獾算法的挖掘階段的心形模型類似于農(nóng)村收購點(diǎn)之間的路線形狀,故而將蜜獾算法融合到農(nóng)村收購點(diǎn)路徑優(yōu)化算法中。
4 改進(jìn)的蟻群算法
針對(duì)蟻群算法收斂速度慢的問題,先提出對(duì)原始蟻群算法[27]的信息素優(yōu)化方法,其次討論了改進(jìn)的蟻群算法的原理。
4.1 信息素的優(yōu)化
首先,在改進(jìn)的蟻群算法中對(duì)參數(shù)信息素重要程度α和信息素啟發(fā)式因子β進(jìn)行多次實(shí)驗(yàn)得到的最優(yōu)值并將其參數(shù)值都設(shè)置為最優(yōu)值2。 其次,根據(jù)蟻群生物學(xué)[28]了解到蟻群中由工蟻、兵蟻、雄蟻、蟻后等組成,其中在工蟻或兵蟻或雄蟻中的螞蟻的個(gè)體大小和體重并不一樣,而其中更重的螞蟻對(duì)信息素時(shí)的釋放量比更輕的螞蟻釋放得更多,由此引入螞蟻的體重突變因素不僅增加了蟻群的多樣性,而且間接地影響了螞蟻釋放信息素的量;在原始蟻群算法中,信息素的釋放量是一個(gè)常量,而在改進(jìn)的蟻群算法中將其信息素改為可變的量。當(dāng)一只螞蟻從i點(diǎn)到j(luò)點(diǎn),若從i點(diǎn)到j(luò)點(diǎn)的路徑不是最優(yōu)路徑時(shí),由于越來越多的螞蟻的移動(dòng)將由信息素來進(jìn)行導(dǎo)向,那么從(i,j) 路徑上走過的螞蟻就越來越多,導(dǎo)致蟻群算法跳出局部最優(yōu)的能力越差。 根據(jù)下文函數(shù)(8)可以看出,可以通過蒙特卡洛準(zhǔn)則中的概率公式得到螞蟻體重突變概率F,進(jìn)而可以得到該螞蟻的體重,因?yàn)橄乱粋€(gè)農(nóng)村點(diǎn)的時(shí)間權(quán)重值越大,則該地點(diǎn)需要等待的時(shí)間越長(zhǎng),而兩地時(shí)間權(quán)重值的差值越大,則函數(shù)(8)得到的概率值F就越小,再通過下文函數(shù)(5)可以看出,F(xiàn)越小、則螞蟻體重突變的概率越小,進(jìn)而該螞蟻釋放的信息素就越少,反之則釋放的信息素越多,最終提高了蟻群算法跳出局部最優(yōu)的能力,加快了算法的收斂速度。
4.2 算法介紹
將m只螞蟻隨機(jī)性地放在了n個(gè)城市里,路徑(i,j) 上信息素的初始值τij(0)=0,螞蟻k(1…48)在t時(shí)刻按照其轉(zhuǎn)移概率來選擇出下一個(gè)節(jié)點(diǎn)。 通過多次實(shí)驗(yàn)測(cè)試得出,信息素重要性α的值和啟發(fā)式因子β的值分別設(shè)置為2和2,將螞蟻的體重突變作為影響啟發(fā)式因子的因素,螞蟻的體重越大,且當(dāng)前路徑的距離越短,啟發(fā)信息越大,則選擇此路徑的可能性越大;實(shí)驗(yàn)測(cè)試得出,改進(jìn)蟻群算法的收斂速度更快、得到的解更優(yōu)。 由此推得的公式為:
其中,Lij表示通過蜜獾算法的挖掘模式計(jì)算得到農(nóng)村山區(qū)路段(i,g,j)的距離,s表示螞蟻通過體重突變后的體重。 函數(shù)(2) 中考慮到山區(qū)地形因素,引入了車輛體重因素對(duì)道路順暢度的影響:車體越重的、主要考慮路線長(zhǎng)短的因素,次要考慮時(shí)間長(zhǎng)短的因素。
各個(gè)路徑所含的信息素更新公式為:
其中,1- ρ表示信息素殘留因子,ρ∈(0,1)。
其中,△τij表示在本次所有螞蟻運(yùn)動(dòng)到目的地時(shí),路徑(i,j) 上螞蟻的信息素總量; 在初始時(shí)刻△τij(0)=0,指的是第k只螞蟻在此次循環(huán)時(shí)留在路徑(i,j) 上的信息素總量。 此處需用到如下公式:
首先,從函數(shù)(5)中可以看出在信息素釋放量的影響因素中添加了車輛重量因素,其車重超出標(biāo)準(zhǔn)越多、且路程越長(zhǎng)時(shí),路段(i,j) 上釋放的信息素就越少,選中該路段的概率就越小,反之則概率越大。 其次,是通過蜜獾算法中挖掘階段的心形模型計(jì)算兩點(diǎn)之間的路程,通過該模型得到的路程更符合實(shí)際情況:
在實(shí)際情況中考察得知,農(nóng)村收購點(diǎn)之間需要翻過山丘或者大山,其路程是弧形的、與蜜獾算法的挖掘階段的心形模型類似,在螞蟻搜尋的初始階段按照蜜獾算法中的挖掘階段的模型找到一個(gè)隨機(jī)產(chǎn)生的坐標(biāo)(xg,yg,),可以通過該模型計(jì)算2 個(gè)農(nóng)村收購點(diǎn)(i,j) 之間的實(shí)際距離為(i,g,j),算法如下:
其中,xg為模型在經(jīng)度上的弧度;yg為模型在緯度上的弧度;α、r0、r1、r2為(0,1)的隨機(jī)數(shù)。
在此基礎(chǔ)上,又推得數(shù)學(xué)模型公式具體如下:
5 模型構(gòu)建及求解
5.1 選取48 個(gè)農(nóng)村點(diǎn)
在甘肅省內(nèi)選擇48 個(gè)農(nóng)村種植區(qū)的經(jīng)緯度作為坐標(biāo),通過改進(jìn)的蟻群算法進(jìn)行路徑規(guī)劃。 選取的農(nóng)村種植區(qū)的坐標(biāo)見表1。

表1 農(nóng)村坐標(biāo)表Tab. 1 Rural coordinates
5.2 問題分析
商貿(mào)企業(yè)在經(jīng)營(yíng)過程中以效益為首,需要開源節(jié)流,而運(yùn)輸過程中消耗的時(shí)間和資源是商貿(mào)企業(yè)支出的重要的一部分,通過對(duì)商貿(mào)企業(yè)運(yùn)輸車輛的路徑規(guī)劃可以讓商貿(mào)企業(yè)減少開支。 商貿(mào)企業(yè)在采購農(nóng)產(chǎn)品時(shí),首先,為了減少不必要的車程開銷,假設(shè)運(yùn)輸車輛從一個(gè)農(nóng)村點(diǎn)出發(fā)、從所有農(nóng)村點(diǎn)只經(jīng)過一次。 直至到達(dá)最后一個(gè)農(nóng)村點(diǎn)的前提下,規(guī)劃出路程最短的最優(yōu)路徑,類似旅行商問題。 本文利用改進(jìn)的蟻群算法求解運(yùn)輸路線的最優(yōu)路徑。 其次,以收購農(nóng)產(chǎn)品為例,計(jì)算所需天數(shù)。 不妨假設(shè)從平?jīng)?焦莊村出發(fā),經(jīng)過所有農(nóng)村點(diǎn)、直到最后一個(gè)農(nóng)村點(diǎn),花費(fèi)的時(shí)間包括運(yùn)輸車輛在路上的時(shí)間和在農(nóng)村點(diǎn)等待收購所花費(fèi)的時(shí)間;根據(jù)前面求解出的最佳運(yùn)輸路徑,計(jì)算出所需的天數(shù),并且對(duì)運(yùn)輸過程做具體的安排。
5.3 求解實(shí)例與仿真
改進(jìn)的蟻群算法給參數(shù)設(shè)定的值可以應(yīng)用到農(nóng)產(chǎn)品運(yùn)輸路徑規(guī)劃中,首先在時(shí)間權(quán)重T =1 時(shí)對(duì)運(yùn)輸路線進(jìn)行規(guī)劃,其次時(shí)間權(quán)重T的值分別按3種方案對(duì)運(yùn)輸路線進(jìn)行規(guī)劃。 通過實(shí)驗(yàn)得到各地點(diǎn)在3 種時(shí)間權(quán)重情況下的運(yùn)輸路徑規(guī)劃結(jié)果。
5.3.1 算法對(duì)比
首先,繪制出48 個(gè)農(nóng)村點(diǎn)的坐標(biāo),如圖1 所示。其次,當(dāng)時(shí)間權(quán)重值T =1 時(shí),求出原始蟻群算法和改進(jìn)的蟻群算法在200 次測(cè)試中每一次得到的最優(yōu)路徑長(zhǎng)度,如圖2 所示。 最后,通過對(duì)表2 中的2 種算法在最優(yōu)解、平均解和耗時(shí)三方面做對(duì)比,可以看出改進(jìn)的蟻群算法收斂速度更快、跳出局部最優(yōu)的能力更強(qiáng)、得到的解更優(yōu),并繪制出改進(jìn)的蟻群算法求解得到的最優(yōu)路徑圖,并進(jìn)行2 種不同的展示,如圖3、圖4 所示。
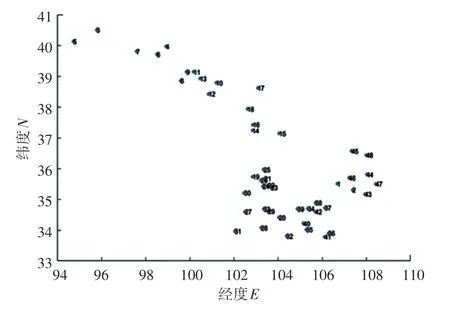
圖1 48 個(gè)地點(diǎn)分布圖Fig. 1 Distribution of 48 sites
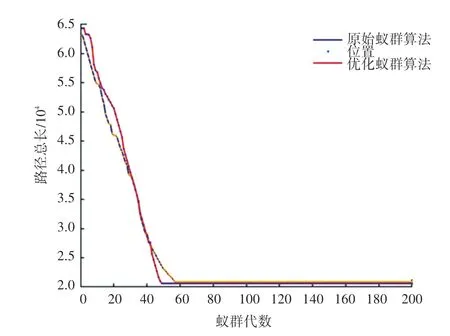
圖2 各地時(shí)間權(quán)值T =1 時(shí)的路徑曲線圖Fig. 2 Path curve when time weight T =1
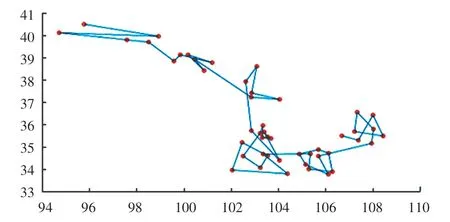
圖3 無經(jīng)緯度的最優(yōu)路徑Fig. 3 Optimal path without longitude and latitude
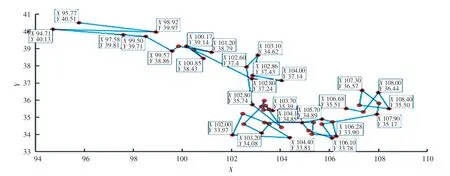
圖4 有經(jīng)緯度的最優(yōu)路徑Fig. 4 Optimal path with longitude and latitude
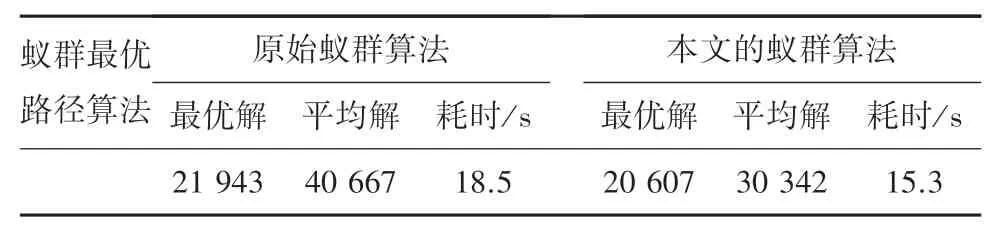
表2 算法比較Tab. 2 Comparison of algorithms
5.3.2 設(shè)置時(shí)間權(quán)重表
從往年的收購花費(fèi)時(shí)間的記錄中可以預(yù)估兩地之間從出發(fā)到完成農(nóng)產(chǎn)品收購需要花費(fèi)的天數(shù)、即時(shí)間權(quán)重,在3 種不同的天氣給48 個(gè)農(nóng)村點(diǎn)設(shè)置時(shí)間權(quán)重值T;T =1 指的是運(yùn)輸車輛到達(dá)農(nóng)村時(shí)、可以立即開始收購農(nóng)產(chǎn)品,值為1.5、表示需要等待0.5天才可以收購農(nóng)產(chǎn)品,其余值依此類推。
5.3.3 求最優(yōu)路徑
在改進(jìn)的蟻群算法中,根據(jù)表3~表5 三個(gè)方案的時(shí)間權(quán)重值分別求出對(duì)應(yīng)的最優(yōu)路線。 經(jīng)過200 次測(cè)試,得到運(yùn)輸車輛的3 種最優(yōu)路徑,如圖5~圖7 所示。3 種策略得到的曲線如圖8 所示。 根據(jù)圖8,可以看出3 條路線的收斂速度、及最優(yōu)路徑的路徑總長(zhǎng)。 車輛央最優(yōu)路徑上花費(fèi)的時(shí)間的結(jié)果曲線如圖9 所示。 根據(jù)圖9,可以看出每輛車經(jīng)過全程所花費(fèi)的時(shí)間。
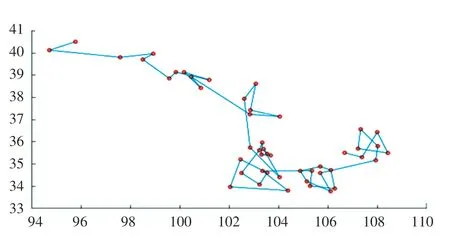
圖5 根據(jù)表2 得到的最優(yōu)路徑Fig. 5 The optimal path obtained according to Table2
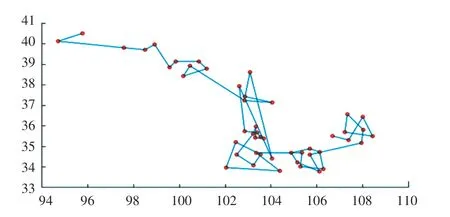
圖6 根據(jù)表3 得到的最優(yōu)路徑Fig. 6 The optimal path obtained according to Table3
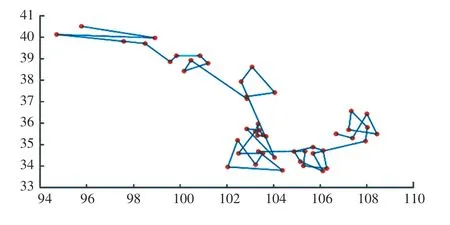
圖7 根據(jù)表4 得到的最優(yōu)路徑Fig. 7 The optimal path obtained according to Table4
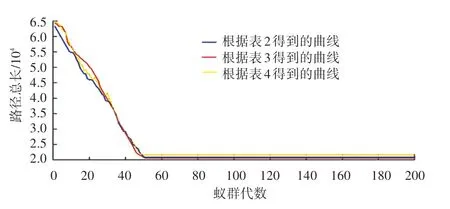
圖8 3 種策略得到的曲線Fig. 8 Curves obtained by three strategies
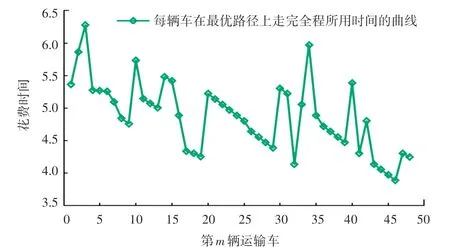
圖9 車輛在最優(yōu)路徑上花費(fèi)時(shí)間的曲線Fig. 9 Curve of time spent by vehicles on the optimal path

表3 方案一的各地的時(shí)間權(quán)重值Tab. 3 Time weight value of each region in scheme I

表4 方案二的各地的時(shí)間權(quán)重值Tab. 4 Time weight values of different regions in scheme II
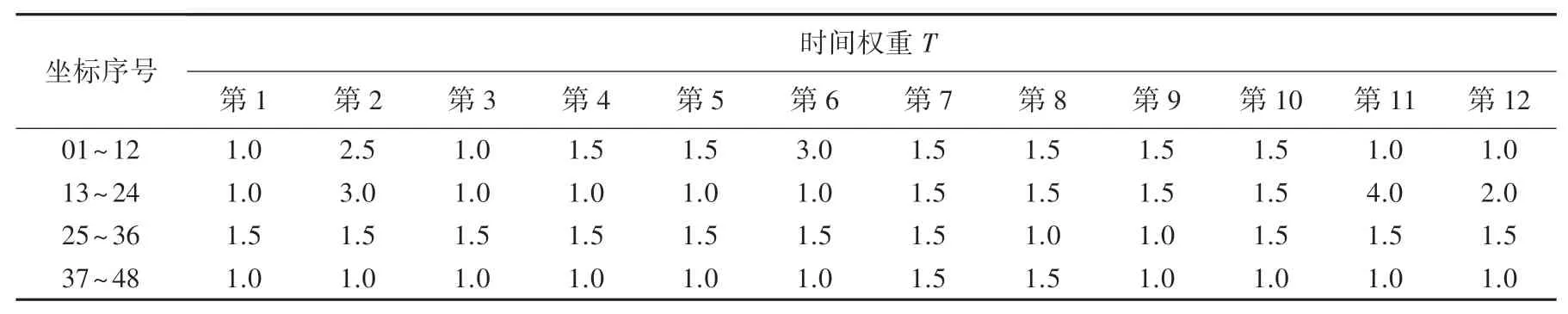
表5 方案三的各地的時(shí)間權(quán)重值Tab. 5 Time weight values of different regions in scheme III
5.3.4 規(guī)劃路徑的建議
從圖5~圖8 看出,可以通過設(shè)置時(shí)間權(quán)重來規(guī)劃出路徑方案,該方案可以在花費(fèi)最少的時(shí)間、農(nóng)產(chǎn)品價(jià)格最低、成熟度最好時(shí),到達(dá)各農(nóng)村收購和運(yùn)輸農(nóng)產(chǎn)品,通過這種方法可以消耗最少的資源來得到最大的收益。 從圖8 中可以看出紅色曲線的運(yùn)輸規(guī)劃路徑在地理順序和路程總長(zhǎng)兩方面是最優(yōu)的運(yùn)輸路徑。 經(jīng)過這48 個(gè)農(nóng)村的最佳運(yùn)輸路路徑為:2—1—3—4—5—6—7—10—8—9—11—15—13—14—12—16—18—17—21—20—19—22—23—26—25—27—28—30—29—33—36—30—31—32—34—35—39—37—47—42—44—38—45—48—46—43—41—40。 花費(fèi)總時(shí)間:3.888 9 天,實(shí)際上就是需4 天。
行程安排:要完成這些村鎮(zhèn)的農(nóng)產(chǎn)品的收購工作,總共需要4 天。 如果企業(yè)安排收購任務(wù)的時(shí)間比較寬裕,可以在符合時(shí)間范圍內(nèi)的規(guī)劃路徑中將天氣等因素考慮其中,如此就可以更完美地規(guī)劃運(yùn)輸路徑了。
6 結(jié)束語
本文提出了一種改進(jìn)的蟻群算法,并將其應(yīng)用到農(nóng)村運(yùn)輸路徑的優(yōu)化求解。 首先,在基本蟻群算法中引入了模擬退火算法的隨機(jī)概率作為螞蟻體重突變的策略的參數(shù)和時(shí)間權(quán)重參數(shù),使算法更快地跳出局部最優(yōu);采用螞蟻體重突變策略增強(qiáng)了種群的多樣性,提高了全局搜索能力和算法的收斂速度。 其次,根據(jù)農(nóng)村運(yùn)輸?shù)沫h(huán)境建立模型,并建立目標(biāo)函數(shù)。 最后,通過Matlab 進(jìn)行仿真實(shí)驗(yàn),結(jié)果表明優(yōu)化蟻群算法能夠更快速地找出最優(yōu)路徑以及在運(yùn)輸過程中花費(fèi)的時(shí)間,有效提高了運(yùn)輸路徑規(guī)劃的效率。 運(yùn)輸路徑規(guī)劃受環(huán)境的影響較大,本文開展的研究未考慮天氣、高山等環(huán)境因素的影響,在以后的研究工作中將增加其他影響運(yùn)輸路徑規(guī)劃因素進(jìn)行系統(tǒng)研究。
猜你喜歡
今日農(nóng)業(yè)(2022年1期)2022-11-16 21:20:05
今日農(nóng)業(yè)(2021年21期)2022-01-12 06:32:04
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中華手工(2017年2期)2017-06-06 23:00:31
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16
中國(guó)工程咨詢(2016年4期)2016-02-14 07:28:28
中外會(huì)展(2014年4期)2014-11-27 07:46:46
中國(guó)記者(2014年2期)2014-03-01 01:38:08
中國(guó)火炬(2011年5期)2011-07-25 10:27:55