基于VMD-RobustICA 與時頻分析的永磁同步電機噪聲源識別
2023-02-28 16:10:14牟保軍鄭立輝王巖松
智能計算機與應用 2023年11期
牟保軍,郭 輝,袁 濤,孫 裴,鄭立輝,王巖松
(上海工程技術大學機械與汽車工程學院,上海 201620)
0 引 言
PMSM 具有功率密度高、效率高、調速范圍寬等優勢,在電動車中得到廣泛應用。 特別是分數槽集中繞組永磁同步電機,具有端部繞組短、齒槽轉矩小、易于加工、弱磁調速能力強、容錯性好等特點,使其成為更好的選擇[1-2]。 隨著電動汽車發展,電動汽車已經逐步成為城市交通中重要噪聲來源,使得噪聲控制和減少噪聲污染已成為PMSM 研究的重要方向。 因此,對于PMSM 識別主要噪聲源和針對其進行控制成為主要研究熱點。
PMSM 的主要噪聲源是機械噪聲和電磁噪聲。電機中機械噪聲主要來自轉子和軸承的動態不平衡等因素,與其他旋轉機械的噪聲特性相似,許多文獻研究了機械噪聲的階次特征[3]。 電機中產生的電磁力一方面驅動電機旋轉,另一方面作用于定子表面產生電磁噪聲[4]。 電磁噪聲的階次特性與電機本身的極數和槽數有關,并受一些非理想因素的影響[5]。 Jae-Woo 等學者[6]分析混合動力汽車使用的內置永磁電機的齒槽轉矩脈動、電磁轉矩脈動、徑向電磁力和切向電磁力的特性,并通過弱化36 階電磁勵磁降低了電機噪聲2 分貝。 目前,電磁力的研究中,在不同空間階數的徑向電磁力對振動噪聲的影響是主要的關注方向[7]。
PMSM 的振動和噪聲信號是一個非定時變信號。 傳統的信號處理方法只能分析信號的統計平均特性,不能充分揭示信號頻率隨時間變化的規律。時頻分析可以提供時域信號和頻域整體或局部變化結果,揭示信號中包含的頻率分量的時變特性。Hilbert-Huang 變換(HHT)是分析具有不穩定和非線性特征信號的一種有效方法[8]。 HHT 已應用于旋轉機械的故障診斷,如轉子、軸承、齒輪等,在許多研究工作中,HHT 常用于提取振動信號[9]。 EMD已經過評估,能夠有效檢測電機故障[10]。 在旋轉機械故障診斷中,利用VMD 提取轉子系統故障特征、滾動軸承故障診斷、松動底座故障診斷等性能較好[11-12]。 VMD 還結合不同的方法對旋轉機械設備在不同工況下的故障進行診斷。 Zhang 等學者[13]基于VMD 的能量熵和小波包(WPD)分解模式研究了銑削過程中的顫振檢測。 卷積盲源分離(BSS) 和VMD 相結合,分析從具有較大驅動速度變化的風力渦輪機收集的軸承裂紋信號[14]。 Bi 等學者[15]通過EEMD 結合RobustICA 方法對汽油機發動機噪聲源進行識別,成功分離識別出了排氣噪聲、燃燒噪聲和活塞撞擊噪聲。 目前,電機的噪聲源復雜,致使電磁噪聲和機械噪聲難以區分。
因此,本文的目的是對永磁同步電機的機械噪聲和電磁噪聲進行分離識別,以進行診斷、評估和分析。 8 極48 槽PMSM 的噪聲測試在半消聲室中進行。 然后,將測試結果應用VMD 結合RobustICA 的方法對PMSM 中的電磁噪聲和機械噪聲進行分離識別。
本論文首先介紹了VMD 和RobustICA 算法的求解原理,并根據其特點進行仿真分析。 然后,經過試驗得出該方法在永磁同步電機噪聲分析結果。 最后,通過結果分析得出該方法可以有效分出電機的電磁噪聲和機械噪聲。
1 理論基礎分析
1.1 變分模態分解
VMD 方法是Dragomiretskiy 等學者[16]提出一種自適應得出約束變分問題最優解的時頻分析方法,可以較好地處理EMD 和EEMD 中出現的模態混疊問題。 約束變分問題可以用方程(1)描述:
其中,{uk}={u1,u2,…,uk} 為模態分量的縮寫;{ωk}={ω1,ω2,…,ωk} 為模態分量對應的中心頻率;K為變分模態分量的數量;?t為t的偏導數;δ(t) 為脈沖函數;;ω為圓頻率2πf。
為了比較EMD、EEMD 和VMD 的特性,使用頻率接近仿真信號進行對比,可用式(2)來表示:
總信號S由4 個子信號組成,如圖1 所示。 然后,采用EMD、EEMD 和VMD 三種方法對模擬信號進行分離和識別,結果如圖2 所示。

圖1 EMD、EEMD 和VMD 仿真信號Fig. 1 EMD、EEMD and VMD simulation signals
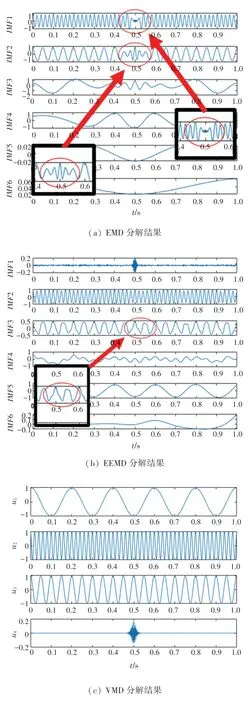
圖2 EMD、EEMD 和VMD 分解結果Fig. 2 Signal separation results of EMD、EEMD and VMD methods
從圖2(a)可以看出,當使用EMD 方法對信號進行分解時,可以通過紅圈標記部分看出結果中出現了模態混疊問題。 從圖2(b)可以看出,當使用EEMD 方法對信號進行分解時,可以通過紅圈標記部分看出原始信號中的S1、S2和S4可以很好地分離,但對于原始信號中的S3,模態混疊問題一定程度上存在。 從圖2(c)可以看出,當信號通過VMD方法分解時,可以準確地分離出混合信號S的4 個子信號。 比較3 種方法的分離結果可以得出結論,由于EEMD 仍然存在模態混疊問題,因此VMD 在信號分解方面比EEMD 更有優勢。
1.2 獨立分量分析
在處理盲源分離問題時,獨立分量分析(ICA)被廣泛使用。通過對混合矩陣A進行估計和混合信號S(t),可以計算出源信號相似的獨立分量。 ICA的工作原理如圖3 所示。

圖3 ICA 的原理圖Fig. 3 The principle diagram of ICA
FastICA 是基于負熵目標函數并應用牛頓迭代法原理進行優化處理的一種并行分布算法[17]。 算法的優勢在于收斂速度高,但是遇到弱相關性的源信號會出現分解不充分或者失效問題。 因此,Zarzoso 等學者[18]提出一種具有更好魯棒性的RobustICA 方法,該算法是一種基于峭度和最優步長的盲源分離算法。 為了能夠體現其性能,應用了一組仿真信號進行對比分析,如圖4 所示。 仿真信號由4 個信號組成:正弦信號、曲線信號、鋸齒信號和方波信號。 這組原始模擬信號通過隨機混合矩陣進行線性混合,形成一個由4 個信號組成的信號。然后,將其作為FastICA 和RobustICA 的信號輸入,結果如圖5 所示。 從結果可發現,FastICA 結果中部分信號不能夠較好地還原其信號特征,見圖5 中紅圈部分,而RobustICA 方法分離出來的結果可以較好地體現原始信號特征。

圖4 源信號Fig. 4 The original signal
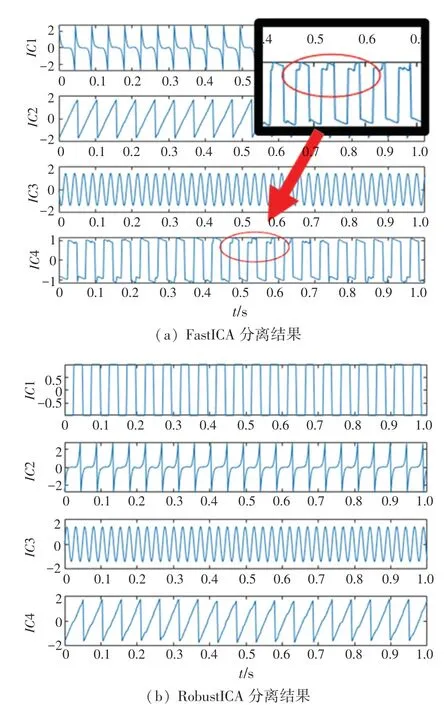
圖5 FastICA 和RobustICA 分離結果Fig. 5 The calculation results of FastICA and RobustICA
2 PMSM 噪聲試驗布置
PMSM 噪聲測試在半消聲實驗室中進行的,背景聲壓級低于10 dBA。 測試配置如下:
(1)設備:西門子40 通道LMS-SCM05、PCB 專業麥克風、CAL200 麥克風校準器和三向加速度傳感器。
(2)采樣頻率:25 600 Hz。
(3)試驗工況:12 000 r/min 空載工況。
實驗中采用采用了LMS TestLab 軟件進行數據采集,PMSM 參數見表1。 測點采用1/4 半球面布置,如圖6 所示。
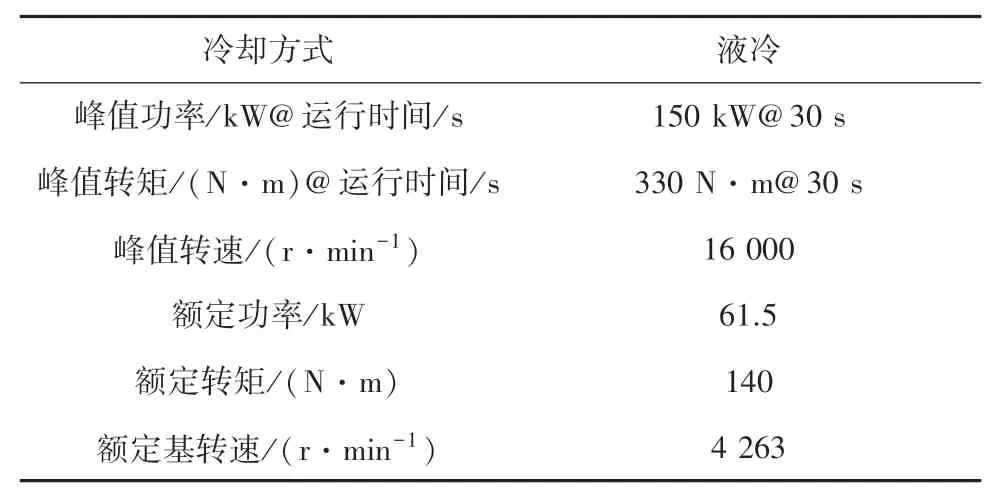
表1 PMSM 基本參數Tab. 1 Table of parameters
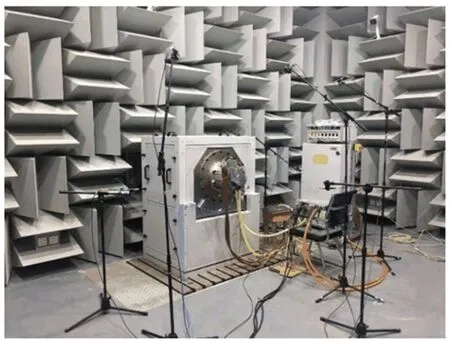
圖6 PMSM 實驗測試系統Fig. 6 PMSM experimental system
3 PMSM 聲源識別
針對采集到的信號,為了提高分析效率,本文對實測PMSM 噪聲信號進行了重采樣。 重采樣頻率為12 800 Hz。 圖7 顯示了從PMSM 頂部收集的噪聲信號的時域和頻域信息。

圖7 噪聲信號時域和頻譜圖Fig. 7 Noise signals in the time domain and frequency domain
根據得到的信號,采用VMD 進行分解得到變分模態分量,應用變分模態分量與原始信號之間相關系數進行分量的取舍。 將結果作為RobustICA 的輸入,得到剩余的變分模態分量中的獨立噪聲源。通過FFT 和CWT 分析結果的時頻特性,對PMSM的噪聲源進行識別。
將重采樣信號進行VMD 分解,信號分解為一系列分量,見表2。 當分解層數K選擇為11 時,后2個中心頻率10 844 Hz 和11 730 Hz 之間的小于1 000 Hz,可以認為信號存在過度分解。 因此,選取的最優分解層數K值為10。 根據分解結果與原始信號的相關系數,提取了8 個變分模態分量的主要成分,見表3。 然后,使用RobustICA 從包含原始信號大部分特征的變分模態分量u1~u8中提取獨立的噪聲源,結果如圖8 所示。
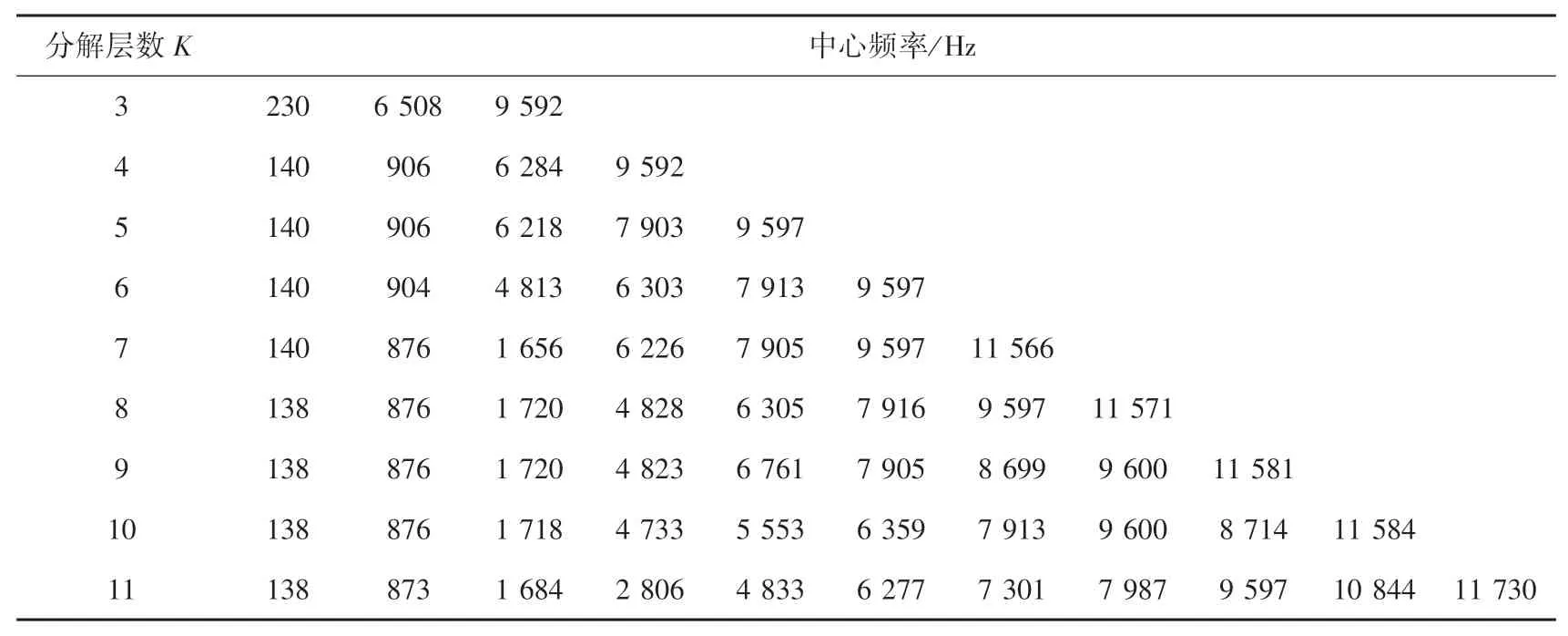
表2 模態層數及其中心頻率Tab. 2 The modal number and their center frequencies
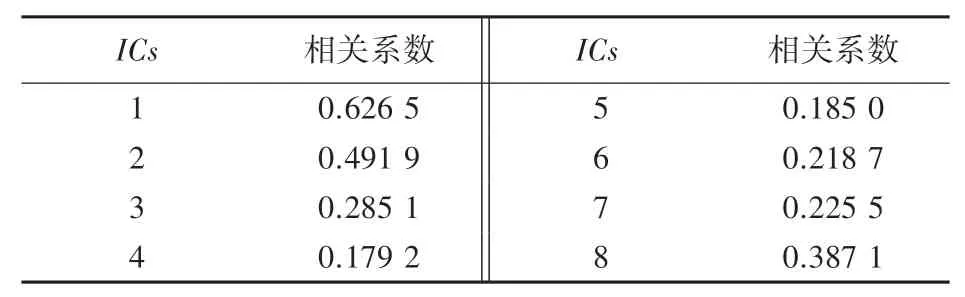
表3 ICs 和源信號相關系數Tab. 3 The correlation coefficients between ICs and the measured signal
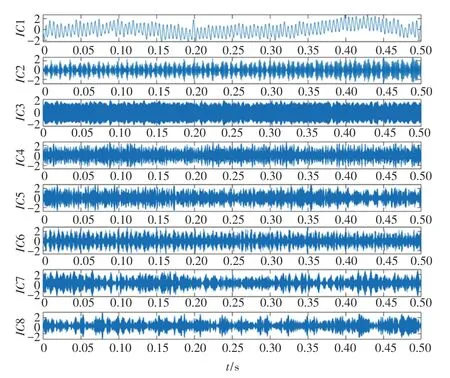
圖8 噪聲信號的VMD-RobustICA 分離結果Fig. 8 Separated results of VMD-RobustICA for noise signals
從圖8 可以清楚地看出,混合信號應用RobustICA 提取了8 個獨立分量,分離過程中的每個獨立分量都可能是PMSM 對應的主要噪聲源。
圖8 中,IC2 的時頻分析結果如圖9 所示。 由圖9 可知,IC2 的峰值頻率主要集中在848 Hz附近,對應轉頻的1~3 倍左右,而且出現持續間斷特點。 根據電機噪聲機理分析可知,該原因是電機轉子不平衡而產生的機械噪聲,并且其頻率特點主要為轉頻1~3 倍,特征頻率表達式為:
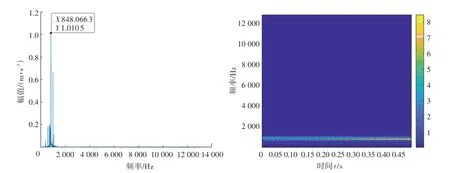
圖9 IC2 時頻分析結果Fig. 9 Time-frequency analysis results of IC2
IC3、IC5 和IC6 的時頻分析結果如圖10 所示。由圖10 可知,IC6 的頻率成分主要集中在1 600 Hz,IC5 的頻率成分主要集中在4 800 Hz,IC3 的頻率成分主要集中在9 602 Hz,且出現持續間斷現象。 根據實驗工況可知轉速基頻在200 Hz 附近,由PMSM 中電磁噪聲機理可知,在理想條件下徑向電磁力波的頻率特征為電機槽、極數的整數倍,電磁噪聲特征頻率表達式為:
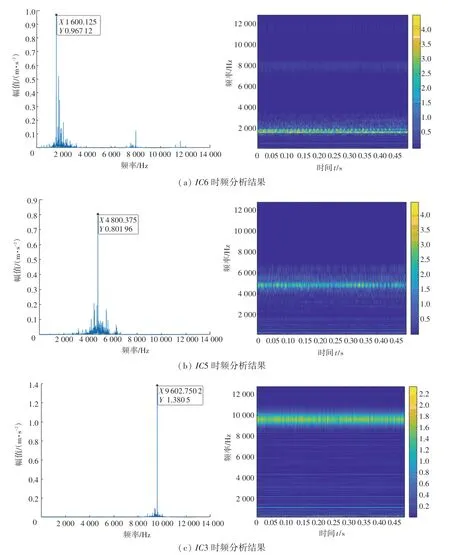
圖10 IC3、IC5 和IC6 的時頻分析結果Fig. 10 Time-frequency analysis results of IC3,IC5 and IC6
其中,i為諧波次數;Q為齒槽數;n為轉速。
根據式(4)可知,IC6、IC5 和IC3 分別對應與電機8 倍頻、24 倍頻和48 倍頻,對應電機極對數的整數倍,可以判斷分量來源是永磁體磁密和電流基波磁密作用產生的電磁噪聲。
4 結束語
本文基于VMD-RobustICA 結合時頻分析方法來分離和識別PMSM 中的主要噪聲源。 通過VMD將信號分解為一組變分模態分量,可以有效解決分解過程中的模態混疊問題。 RobuseICA 可準確提取噪聲源,與VMD 相結合,VMD 將原始信號分解為10 個子信號,經過相關分析濾波后,再進行RobustICA 分析,得到可能的噪聲源信號以獲得主要噪聲源,并且可以更有效地分離信號中的獨立分量,結合時頻分析的結果可以判斷獨立分量對應的的噪聲源。 因此,VMD-RobustICA 結合時頻分析的組合方法是PMSM 電磁噪聲和機械噪聲分離識別的有效工具。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年18期)2018-11-14 01:48:24
電子制作(2018年11期)2018-08-04 03:25:42
山東工業技術(2016年15期)2016-12-01 05:31:22
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39