智能汽車橫向控制方法
2023-03-02 01:58:08吳晨
汽車實用技術(shù) 2023年4期
吳 晨
(陜西工業(yè)職業(yè)技術(shù)學(xué)院 汽車工程學(xué)院,陜西 咸陽 712000)
汽車產(chǎn)業(yè)的不斷發(fā)展對交通、環(huán)境和能源都造成了很大的壓力,而智能汽車作為未來汽車的發(fā)展方向,能很大程度地緩解這些問題。因此,近年來智能汽車逐漸受到各國政府、研究學(xué)者及企業(yè)的廣泛關(guān)注,智能汽車的最終目標(biāo)是實現(xiàn)自主駕駛,即汽車可以不需要駕駛員的操縱和監(jiān)測,僅通過傳感器、控制單元和其他技術(shù)與設(shè)備就能實時監(jiān)測車輛狀態(tài)并控制車輛安全行駛。橫向控制作為智能汽車研究領(lǐng)域中的重點和難點技術(shù)之一,主要是路徑的跟隨控制,控制車輛能根據(jù)規(guī)劃出的最優(yōu)路徑進(jìn)行行駛,保證乘車的安全性和舒適性。
1 智能汽車動力學(xué)模型
智能汽車橫向控制中許多控制理論的應(yīng)用依賴于車輛動力學(xué)模型。車輛的動力學(xué)模型包括懸架特性模型和車輛-輪胎模型。懸架特性模型一般用來研究車輛的平順性問題,車輛-輪胎模型一般用來研究車輛的穩(wěn)定性問題,本文主要研究車輛在平坦道路上的橫向控制,也就是研究車輛是否能穩(wěn)定、快速地跟隨期望路徑行駛,所以忽略懸架特性模型,僅研究車輛-輪胎模型。雖然系統(tǒng)模型較復(fù)雜時,可更準(zhǔn)確地描述車輛特性,路徑跟蹤也更為精確,但同時會帶來計算量大、參數(shù)調(diào)整復(fù)雜等問題。所以通常在智能汽車橫向控制的研究中,會對車輛模型進(jìn)行簡化,以便更好地分析。
1.1 2自由度模型
2自由度模型是智能汽車橫向控制中應(yīng)用最多的模型,研究表明,當(dāng)車輛側(cè)向加速度小于0.2g時,結(jié)合線性輪胎模型,即可很好地表現(xiàn)車輛的動力學(xué)響應(yīng)。
隋官昇等[1]針對汽車低速行駛軌跡,假設(shè)車身的縱向速度不變,將車輛模型簡化為縱向運動和橫擺運動,建立車輛的二自由度動力學(xué)模型。
1.2 3自由度模型
3自由度模型將車輛當(dāng)作一個線性的動力學(xué)系統(tǒng),包括車輛的側(cè)向運動、橫擺運動和側(cè)傾運動,可研究車輛合理的側(cè)傾運動。
柴瑞強等[2]針對彎道時車輛進(jìn)行軌跡跟蹤的精度較差,且容易發(fā)生側(cè)滑的現(xiàn)象,建立了3自由度車輛動力學(xué)模型,結(jié)合準(zhǔn)線性輪胎模型,利用控制算法跟蹤軌跡,保證車輛彎道行駛時軌跡跟蹤的高精度和穩(wěn)定性。
1.3 7自由度模型
7自由度模型包括車輛的縱向運動、側(cè)向運動、橫擺運動以及四個車輪的轉(zhuǎn)動,結(jié)合輪胎模型,可在確保車輛行駛穩(wěn)定性的前提下,實現(xiàn)車輛的橫向控制。
滿金[3]建立了車輛的7自由度模型,并使用魔術(shù)公式描述了輪胎模型,保證了車輛對路徑跟蹤實時性和穩(wěn)定性的要求。
2 常見的橫向控制方法
2.1 PID控制
比例-積分-微分(Proportion Integration Diffe- rentiation, PID)控制是應(yīng)用最廣泛的一種經(jīng)典控制方法,為單輸入單輸出的控制方法,通過將車輛的預(yù)期狀態(tài)與實際狀態(tài)之間的偏差按照比例、積分和微分的關(guān)系進(jìn)行控制,實現(xiàn)車輛的橫向控制,如圖1所示。PID控制結(jié)構(gòu)簡單、穩(wěn)定性好、可靠性高,但控制效果取決于控制參數(shù)是否合適,較難應(yīng)用于多變量和時變系統(tǒng)。
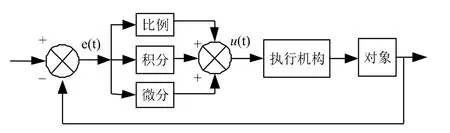
圖1 PID控制原理
NETTO等[4]針對大曲率路徑跟蹤問題,基于最優(yōu)路徑檢測數(shù)據(jù),提出了一種PID控制策略。
HAYAKAWA等[5]設(shè)計了基于PID控制的前饋控制器和反饋控制器,能夠在汽車速度發(fā)生變化時控制車輛穩(wěn)定的轉(zhuǎn)向。
后來隨著控制理論的進(jìn)一步發(fā)展,PID控制法逐漸結(jié)合其他控制方法,針對具有不確定性、非線性和外界干擾的系統(tǒng)進(jìn)行控制器設(shè)計。
韓愛國等[6]綜合考慮橫擺角速度和單點預(yù)瞄模型本身誤差建立駕駛員模型,采用滑模控制進(jìn)行路徑跟蹤,同時使用PID控制消除單點預(yù)瞄模型產(chǎn)生的誤差。
2.2 純追蹤控制
純追蹤控制(Pure Pursuit, PP)基于幾何原理進(jìn)行計算,可用來計算車輛從當(dāng)前位置到預(yù)期位置之間走過的弧形軌跡,這種方法不需要建立車輛的動力學(xué)模型,結(jié)構(gòu)簡單,直觀。但需要確定合適的預(yù)瞄距離,才能達(dá)到較好的路徑跟蹤精度。
呂文杰等[7]針對前視距離隨車輛狀態(tài)發(fā)生變化,將純追蹤控制與模糊控制器結(jié)合,通過模糊控制確定前視距離,并能根據(jù)工況實時調(diào)整,仿真結(jié)果表明,路徑跟蹤精度明顯提高。
張?zhí)K才等[8]針對變速和復(fù)雜曲率的路徑,結(jié)合純追蹤控制和模型預(yù)測控制設(shè)計橫向運動控制器,當(dāng)車輛縱向車速較低時,使用純追蹤控制,當(dāng)車輛縱向車速較高時,采用模型預(yù)測控制。
2.3 最優(yōu)控制
最優(yōu)控制方法是基于現(xiàn)代控制理論的控制方法,對橫向位置、轉(zhuǎn)向速度等控制參數(shù)分配不同權(quán)重,對作為控制量的車輪轉(zhuǎn)角序列進(jìn)行調(diào)整得到性能指標(biāo)泛函最小值。由于控制器計算量大,主要針對線性定常系統(tǒng),由于車輛具有非線性特點,所以最優(yōu)控制在車輛橫向控制中具有一定的局限性。
馬瑩等[9]將有限時間內(nèi)的當(dāng)前位置與預(yù)瞄點位置誤差、當(dāng)前角度與預(yù)瞄點角度的誤差作為控制變量,構(gòu)建車輛橫向控制模型,仿真及實車結(jié)果驗證控制器誤差小。
郭景華等[10]針對預(yù)瞄距離不同對橫向控制的影響,基于最優(yōu)控制理論設(shè)計了橫向路徑跟蹤控制系統(tǒng),主要包括反饋控制和前饋控制,其中前饋控制用來補償路徑曲率干擾。
2.4 滑模控制
滑模控制系統(tǒng)通過設(shè)計控制律,使系統(tǒng)的運動軌跡按預(yù)定的滑模軌跡改變,其控制參數(shù)少,響應(yīng)快,不受外界擾動干擾。
姜立標(biāo)等[11]設(shè)計了新的趨近律,建立基于反步控制的滑模控制模型,系統(tǒng)穩(wěn)定性好。
徐明法[12]提出了如何對車輪滑移率進(jìn)行合理分配,基于滑模控制設(shè)計了車輛橫向控制器。
2.5 模型預(yù)測控制
模型預(yù)測控制(Model Predictive Control, MPC)也可叫做滾動時域最優(yōu)控制,針對非線性動力學(xué)模型可預(yù)測未來某段時間內(nèi)車輛的輸出,通過解決帶約束下的最優(yōu)控制問題使車輛按照理想路徑行駛。根據(jù)汽車行駛速度和方向盤轉(zhuǎn)角等車輛信息預(yù)測橫擺角速度,由此計算對應(yīng)的制動力大小和橫擺力矩,從而提高車輛的行駛穩(wěn)定性。該控制魯棒性強,穩(wěn)定性好。但由于非線性系統(tǒng)的計算量較大,MPC需要在控制周期內(nèi)完成大量計算。因此,車輛橫向控制中,車輛需要進(jìn)行線性化后采用模型預(yù)測控制。
江浩斌等[13]針對智能汽車在復(fù)雜路面條件下的自適應(yīng)性,基于模型預(yù)測控制理論,利用遺傳算法優(yōu)化最優(yōu)時域參數(shù),引入縱向車速和道路曲率,設(shè)計了汽車路徑跟蹤控制器,經(jīng)仿真驗證,提高了路徑跟蹤的魯棒性。
楊陽陽等[14]針對存在較大初始偏差的情況,將模型預(yù)測控制和純追蹤控制混合設(shè)計橫向控制器,當(dāng)橫向偏差較大時,運用純追蹤控制法控制車輛,當(dāng)橫向偏差較小且滿足算法約束時,則切換至模型預(yù)測控制,經(jīng)仿真及實車驗證,設(shè)計的橫向控制器魯棒性及跟蹤精度均較高。
2.6 自適應(yīng)控制
自適應(yīng)控制可用來控制不完全確定性的系統(tǒng),當(dāng)有外部干擾及本身參數(shù)不停發(fā)生變化時,可采用自適應(yīng)控制,通過不斷檢測車輛工作狀態(tài)、優(yōu)化控制準(zhǔn)則,可不斷對系統(tǒng)參數(shù)進(jìn)行調(diào)整,達(dá)到最佳控制效果,通常也與其他控制方法一起使用。
ZHENHAI G等[15]使用BP(Back Propagation)神經(jīng)網(wǎng)絡(luò)表示和優(yōu)化控制參數(shù),設(shè)計自適應(yīng)PID控制器,使用誤差反饋調(diào)整PID參數(shù)。
吳永剛[16]針對不同工況下智能汽車的適應(yīng)性不足的問題,將自適應(yīng)控制與模型預(yù)測控制相結(jié)合,分析時域與約束等參數(shù)對控制器的影響,對模型預(yù)測控制器的參數(shù)進(jìn)行自適應(yīng)優(yōu)化,實現(xiàn)參數(shù)自適應(yīng),改善車輛路徑跟蹤精度,仿真結(jié)果表明,所涉及的橫向控制器跟蹤精度和穩(wěn)定性都較高。
2.7 模糊控制
模糊控制基于模糊數(shù)學(xué),包括模糊化、知識庫、模糊推理和解模糊,無需精確的數(shù)學(xué)模型,利用模糊集合和模糊變量模擬人類思維,只要建立正確的模糊規(guī)則,就能達(dá)到較好的控制效果,如圖2所示。由于車輛橫向控制具有非線性的特點,且模型復(fù)雜,所以比較適宜采用模糊控制。但由于模糊控制中規(guī)則參數(shù)需要人為確定,易造成穩(wěn)態(tài)誤差。
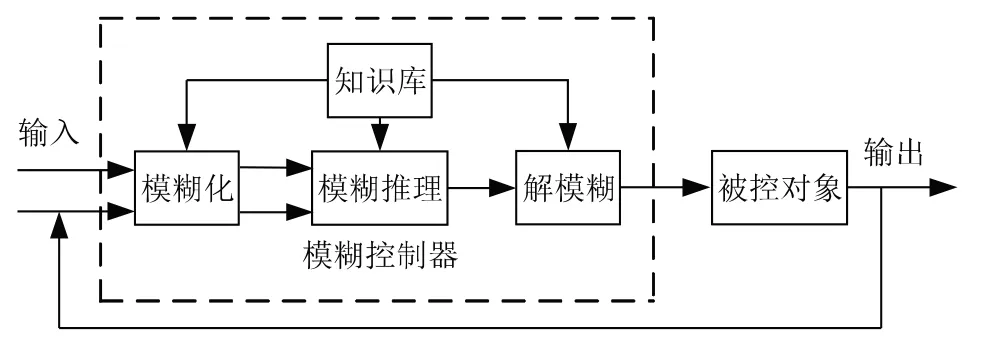
圖2 模糊控制結(jié)構(gòu)
李琳輝等[17]建立基于視覺預(yù)瞄距離的車輛橫向控制模型,將模糊和滑模相結(jié)合,以車輛當(dāng)前橫向偏差和方位偏差組成的綜合偏差為參數(shù)設(shè)計滑模面,利用模糊規(guī)則調(diào)整變量大小保證車輛轉(zhuǎn)向的穩(wěn)定性,仿真結(jié)果表明,該橫向控制器保證車輛跟蹤路徑的精確性和穩(wěn)定性。
刁勤晴等[18]針對大曲率路徑轉(zhuǎn)向機構(gòu)過早轉(zhuǎn)向及駛?cè)胲囁龠^高,提出了雙預(yù)瞄點的策略,并設(shè)計了模糊控制器,經(jīng)仿真驗證后,此橫向控制器在大曲率路徑跟蹤時的控制精度高。
3 總結(jié)和展望
智能汽車正在逐漸走進(jìn)人們的視野,作為智能汽車的核心技術(shù),橫向控制是決定整車性能的關(guān)鍵。車輛橫向控制經(jīng)過多年發(fā)展,已經(jīng)較為成熟,其關(guān)鍵問題在于考慮極端路況時保證車輛橫向控制的魯棒性與平順性。未來智能汽車的橫向控制將要求在雨雪天氣、積水等復(fù)雜路況下保證控制算法具有強魯棒性,同時實際駕駛過程中,車輛作為一個整體,橫向和縱向的力學(xué)影響是相互耦合的,因此,想要進(jìn)行高精度的車輛控制,必須考慮進(jìn)行車輛橫縱向的耦合控制,另外,隨著車聯(lián)網(wǎng)技術(shù)的發(fā)展,依靠車用無線通信技術(shù)(Vehicle to Everything, V2X)可以獲取車路人的信息,完成車輛高精度的橫向控制,也將是未來的一個研究方向。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
