基于V2V通信的車隊縱向協同控制
2023-03-02 01:58:10殷康超祁子豪
汽車實用技術 2023年4期
殷康超,祁子豪
(長安大學 汽車學院,陜西 西安 710064)
現如今,隨著交通環境的日益復雜,導致交通事故頻發,交通擁堵加劇,為此,如何改善交通問題,提高交通效率,已經成為社會的熱點問題[1]。客觀來說,實現理想情況下的完全無人駕駛是解決交通問題最有效的途徑,但是由于法律法規的限制以及關鍵技術的壁壘,使得完全的無人駕駛在很長時間內無法投入實際應用,為了緩解當前的交通問題,目前后車自動跟隨前車形成車輛隊列的行駛模式得到廣泛關注[2]。在傳統的自適應巡航(Adaptive Cruise Control, ACC)系統中,由于僅僅使用單車傳感器進行感知,因此,在雨霧天等特殊工況下,傳感器感知能力不佳,車輛的跟車性能較差,為了改善傳統ACC的不足,本文提出了將車聯網車車(Vehicle to Vehicle, V2V)通信技術應用于車隊縱向協同控制系統中,使得車輛隊列在行駛的過程中,不僅能夠依靠傳感器感知距離信息,還能夠依據V2V通信進行數據交互,實時獲得前方車輛當前的狀態信息,且依靠通信技術可以在傳感器感知能力不佳的情況下穩定的獲取信息,從而提升車輛在多場景下的跟車性能,保證跟車安全性和穩定性。
1 車車通信系統
1.1 車輛信息交互系統
當車隊中包含多個車輛時,車車之間的通信就會構成通信網絡,根據信息的不同傳遞方式,可形成不同的信息拓撲結構。圖1為所設計的車車信息交互的結構,當車輛隊列在行駛過程中,一方面可以通過在車輛上搭載車聯網(Vehicle to Everything, V2X)車載單元(On Board Unit, OBU)進行車車之間的信息交互,使得后車能夠實時地接收前車發送的速度、加速度和位置信息;另一方面可以通過在后車上搭載的激光雷達獲取車車之間的距離信息,后車根據接受到的信息通過設計合理的間距跟馳算法對其跟隨速度進行規劃,并通過相應的執行機構對車輛實施控制,從而保證車隊跟車的安全性和魯棒性。

圖1 車車信息交互結構圖
1.2 車輛通信方式的選擇
本文所設計的車輛通訊系統中,后車與前車之間是通過所搭載的車載OBU進行通信,但是進行通信的設備必須擁有統一的通信標準才能實現通信,因此,需要首先確立其通信規范。近年來,V2V通信在車輛網領域的通信技術路線有兩種,一種是專門為車輛通信開發的專用短程通信(Dedicated Short Range Communications, DSRC)技術[3],另一種是基于蜂窩網絡開發的,以電信為基礎的蜂窩移動網絡的車聯網通信(Cellular Vehicle-to-Everything, C-V2X)技術[4]。其中DSRC通信技術發展較早,其特點是對短程中高速行駛的車輛之間進行通信連接,它的技術相對來說比較成熟、穩定,但是缺點是通信時延較長,而且通信距離有限。而C-V2X技術是基于3G/4G/5G等蜂窩網通信技術演進形成的車用無線通信技術,可實現長距離和更大范圍的可靠通信,因此,為了車輛跟車的實時性和魯棒性,本文選擇C-V2X通信技術。相比于使用4G通信技術,雖然使用5G技術的V2X通信延時性更短、更高效,但是考慮到當前5G基站建造成本過高且普及性較差,且使用4G的通信技術滿足當前的汽車網絡時效性要求,因此,本文選擇基于4G蜂窩網絡的LET-V2X通信技術。
2 車輛縱向協同控制系統
2.1 車輛縱向間距控制策略
為了保證車輛在行駛過程中跟車的安全性,同時盡可能的減小跟馳距離,需要建立合適的安全距離模型。當前研究的安全距離模型根據的是安全距離還是安全時間可分為固定間距模型、固定時距模型和可變時距模型[5]。其中固定間距模型不能很好地考慮前車速度變化所帶來的安全性問題,可變車頭時距的控制精度雖然較高,但是結構復雜,因此,本文的間距控制采用固定車頭時距模型,把后車的反應時間作為固定的車頭時距,并在車輛跟隨的過程中,將相對速度信息和間距誤差作為對后車控制的輸入量,通過間距控制算法得到后車的期望加速度,調節后車速度,使后車行駛在期望的車間距之內,從而保證跟車的穩定性。
車隊在行駛過程中前車速度為vn-1,當前車以加速度a制動時,其停止之前所行駛的距離為
假設后車的反應時間為t,經過時間t后,后車同樣以加速度a制動,后車行駛過的距離為
兩車在行駛的過程中,要求兩車之間的距離始終要大于安全距離dsafety[6]。因此,車輛在跟車行駛過程中的期望間距dexp需要滿足
在車隊正常行駛過程中,前后兩車的速度可以看作近似相等,因此,上式可以簡化為
因此,在此處就可以把后車的反應時間t看作是固定的車頭時距,根據該模型,車輛在跟隨行駛的過程中,其期望的間距主要考慮后車的速度,并不考慮兩車的相對速度的影響,但實際上,相對速度對跟車安全性也有很大影響。因此,在本文的跟隨控制中,通過不斷對后車跟馳速度進行反饋調節,從而使前后速度趨于一致,進而保證車輛間距的穩定[7]。其間距控制算法結構如圖2所示。

圖2 間距控制算法
圖2 中,G為車輛動力學模型的傳遞函數;Kp和Kv是比例誤差調節系數;Ku為濾波系數;aexp為后車的期望加速度。該算法以前車的加速度作為前饋控制,實際間距和期望間距的誤差作為反饋控制,后車輸入的期望加速度為[8]
式中,ei為間距誤差;an-1為前車的加速度。
2.2 車輛縱向控制結構
為了更加清楚地表現車輛縱向控制的結構,本文將車輛縱向控制邏輯分為上下兩層,其具體的結構如圖3所示。上層控制器是根據所制定的間距控制策略和輸入的車輛狀態信息計算出后車的期望加速度并輸出;下層控制器則是根據所輸入的期望加速度,利用車載工控機,其通過控制器局域網絡(Controller Area Network, CAN)總線與車輛的線控底盤相連,從而通過CAN總線對車輛的線控制動和線控驅動進行控制,最終在跟馳過程中實時調節后車的行駛速度,保證跟馳的安全與穩定。

圖3 車輛縱向控制結構圖
3 車隊縱向協同控制系統的仿真
本文利用Prescan和Simulink聯合仿真對所設計的車輛跟隨算法進行驗證,首先在Prescan軟件中搭建實驗場景,圖4為兩輛車組成的隊列在道路上協同行駛的場景。仿真場景搭建完成后,利用Matlab對Prescan進行擴展,其主要作用是對控制器進行設計和算法進行求解,并將求解后的 控制命令通過接口傳遞到Prescan進行模型的求解,通過在Prescan中的車輛上搭載激光雷達和V2X傳感器獲得的有用數據輸出返回到Matlab中,作為規劃算法的輸入。
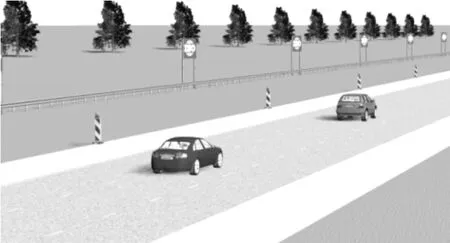
圖4 Prescan仿真環境中兩輛車的協同行駛
根據所設計的車輛縱向控制算法,在Simulink中搭建如圖5所示的車輛縱向控制模型。其中Lead Car為前車控制模塊,Ego Car為后車控制模塊,通過向Lead Car輸入加速度控制信號a_lead對Prescan中的前車的速度進行控制,仿真前設置前后車的初始位置x0_lead和x0_ego,前后車的初始速度v0_lead和v0_ego,Lead Car和Ego Car的輸出結果為各自的實時位置和速度信息,并分別計算其相對值。Adaptive Cruise Control System為核心控制模塊,其輸入信號為根據間距控制策略所制定的間距誤差d_rel和相對速度信息v_rel,除此之外,根據固定車頭時距模型,設定t_gap為后車跟馳反應速度,將其作為固定的車頭時距,在這里根據經驗設置為1.4 s,除此之外,為了使車輛的速度不至于過高,增加了一個速度輸入v_set,通過該控制模塊進行計算后,向后車輸出期望加速度信息a_ego,對后車的速度進行控制,使間距保持在合理的范圍內。

圖5 Simulink車輛控制模型
為了模擬車輛縱向協同運動,在Prescan中先設定一條縱向運行軌跡,前車按照Simulink模型中預設的加速度、初速度和初始位置信號進行運動,然后給后車輸入一定的初始速度,設定與前車保持一定的初始距離作為初始狀態進行仿真,圖6為車輛跟隨過程中的加速度變化過程,圖中實線即為對前車加速度的控制,虛線為后車跟車過程中加速度的變化曲線。圖7為前后車的速度變化過程,給前車初始速度25 m/s,后車初始速度20 m/s,因此,在剛開始為了跟車穩定,后車的加速度較大,在10 s以后車的速度基本與前車保持一致,達到預期效果。
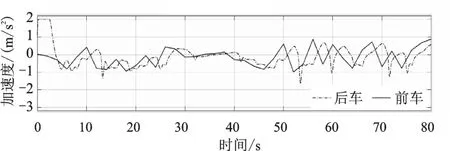
圖6 加速度變化曲線

圖7 速度變化曲線
圖8 為車輛跟隨過程中的距離變化,虛線為車隊在行駛過程中前后車之間的安全距離,實線為實際的跟車距離,由圖可知在車輛跟隨的過程中,后車的跟馳距離始終大于其安全距離,從而驗證了車輛縱向協同控制策略的準確性。

圖8 距離變化曲線
4 結論
本文將V2V通信技術應用到車隊縱向協同控制系統中,在雷達感知獲取信息的基礎上,通過車車通信實時獲取車輛狀態,實現不單純依賴傳感器感知能力獲取信息,改善了實現惡劣工況下的跟車性能,提高了車輛跟車的安全性,為車路協同輔助駕駛提供了一定的理論基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中外會展(2014年4期)2014-11-27 07:46:46
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
