基于DSP技術的爬壁機器人吸附控制系統(tǒng)設計
2023-03-04 13:25:30陳巧
計算機測量與控制 2023年2期
陳 巧
(深圳技術大學 大數(shù)據(jù)與互聯(lián)網(wǎng)學院, 廣東 深圳 518118)
0 引言
爬壁機器人是一種能夠在垂直、傾斜,甚至是倒立的壁面上工作的極限機器人,并且可以承載相應的工作工具,完成特殊的工作,是一種將機械、控制、傳感器等技術結合起來的特殊作業(yè)機器人[1]。按照爬壁機器人的吸附形式,可將其分類為磁吸、負壓以及靜電吸附等類型。為保證爬壁機器人的工作性能,必須具有壁面吸附和壁面移動兩大基本功能。壁面吸附能力要求無論在任何情況下,機器人都可以在工作壁上附著,而壁面運動能力要求機器人在對工作壁面進行吸附的同時,還要具備一定的運動性能。良好的吸附力需要盡量大的吸附力,而良好的壁面運動需要盡量少的吸附力,因而在某種程度上,壁面的吸附力和運動性能是矛盾的,互相制約的。
在保證爬壁機器人在作業(yè)平面上穩(wěn)定移動的同時,為了降低爬壁機器人的摩擦力,需要盡量減小機器人的吸附程度。而在爬壁機器人移動過程中,壁面的粗糙度可能發(fā)生變化,進而影響爬壁機器人的摩擦力。因此,需要控制爬壁機器人的吸附情況。目前相關領域?qū)W者針對爬壁機器人吸附控制系統(tǒng)進行了研究。文獻[2]設計了基于ANSYS的爬壁機器人永磁輪吸附裝置的設計與優(yōu)化,利用了ANSYS技術,對永磁吸附裝置進行研究,并對磁路進行優(yōu)化,實現(xiàn)磁極同名陣列排布的新型永磁輪設計。文獻[3]設計了基于旋翼負壓混合吸附的爬壁清洗機器人系統(tǒng),介紹了一種基于旋翼負壓混合吸附作業(yè)的多角度履帶清掃機器人,并對其爬行穩(wěn)定性和越障特性進行了動力學分析。然而上述吸附控制系統(tǒng)在實際應用過程中存在明顯的控制效果不佳的問題,主要體現(xiàn)在吸附力過大導致機器人移動困難、吸附力過小導致機器人掉落等方面。
為此,設計了基于DSP技術的爬壁機器人吸附控制系統(tǒng)。DSP技術是數(shù)字信號處理技術,它是對信號進行數(shù)字化表達和處理的一種原理和技術。基于數(shù)字信號處理技術,為實時爬壁機器人運行狀態(tài)的檢測提供技術支持,確保爬壁機器人吸附控制系統(tǒng)的吸附控制效果。
1 爬壁機器人吸附控制系統(tǒng)硬件結構設計
基于DSP技術的爬壁機器人吸附控制系統(tǒng)設計是采用硬件與軟件相結合的方式,在爬壁機器人的吸附和移動原理的支持下,對爬壁機器人吸附狀態(tài)的實時數(shù)據(jù)進行采集,并通過DSP技術進行數(shù)據(jù)分析,確定當前機器人的吸附狀態(tài)。利用傳感器裝置采集爬壁機器人當前運行環(huán)境的基本數(shù)據(jù),從而計算出當前環(huán)境下機器人穩(wěn)定運行所需的吸附力。將當前機器人實際吸附力與所需吸附力進行比較,得出吸附控制量的求解結果。在爬壁機器人吸附控制器的基礎上,加設DSP技術的運行模塊,實現(xiàn)對系統(tǒng)控制器的設計,并以此作為系統(tǒng)吸附控制的執(zhí)行部件。
1.1 爬壁機器人傳感器裝置
爬壁機器人吸附控制系統(tǒng)中安裝的傳感器包括壓力傳感器、位姿傳感器等,采集的壓力數(shù)據(jù)內(nèi)容包括真空吸附壓力和負壓吸附壓力,選擇型號為MPX4100型號的氣體壓力,將壓力傳感器安裝在爬壁機器人輪臂表面,在爬行時,輪臂受到正向壓力的作用,產(chǎn)生了變形,應變片輸出電壓信號,由壓力傳感器A/D轉換得到電壓值,并判定其正向壓強,從而判定吸附力的強弱,然后再向吸附力下達指令進行自適應調(diào)節(jié)[4]。針對爬壁機器人的實時位姿問題,選取位姿傳感器芯片MPU6050來實現(xiàn)爬壁機器人定位,該傳感器整合了加速度傳感器、MEMS陀螺儀等運動感測組件。MPU6050的三軸加速度傳感器可以獲得與正向、垂直于墻的加速度,并對其進行二次積分,得出了爬壁機器人的位置。MPU6050采用卡爾曼濾波技術,把加速度與陀螺儀所測得的角速度相結合,可以實現(xiàn)對角速度的判斷。
1.2 DSP數(shù)字信號處理器
DSP是整個控制系統(tǒng)的關鍵部件,其運算速度和對數(shù)據(jù)的處理能力將對爬壁機器人的性能產(chǎn)生很大的影響。此次設計的爬壁機器人吸附控制系統(tǒng)選用TMS320F28335型號的DSP處理芯片,該芯片支持150 MHz主頻,256K的片內(nèi)Flash,增加了事件管理和嵌入式控制,可同時輸出18個 PWM波段,16個12位 AD變換通道只需要80 ns[5]。結合DSP技術的工作原理,DSP數(shù)字信號處理器結構如圖1所示。
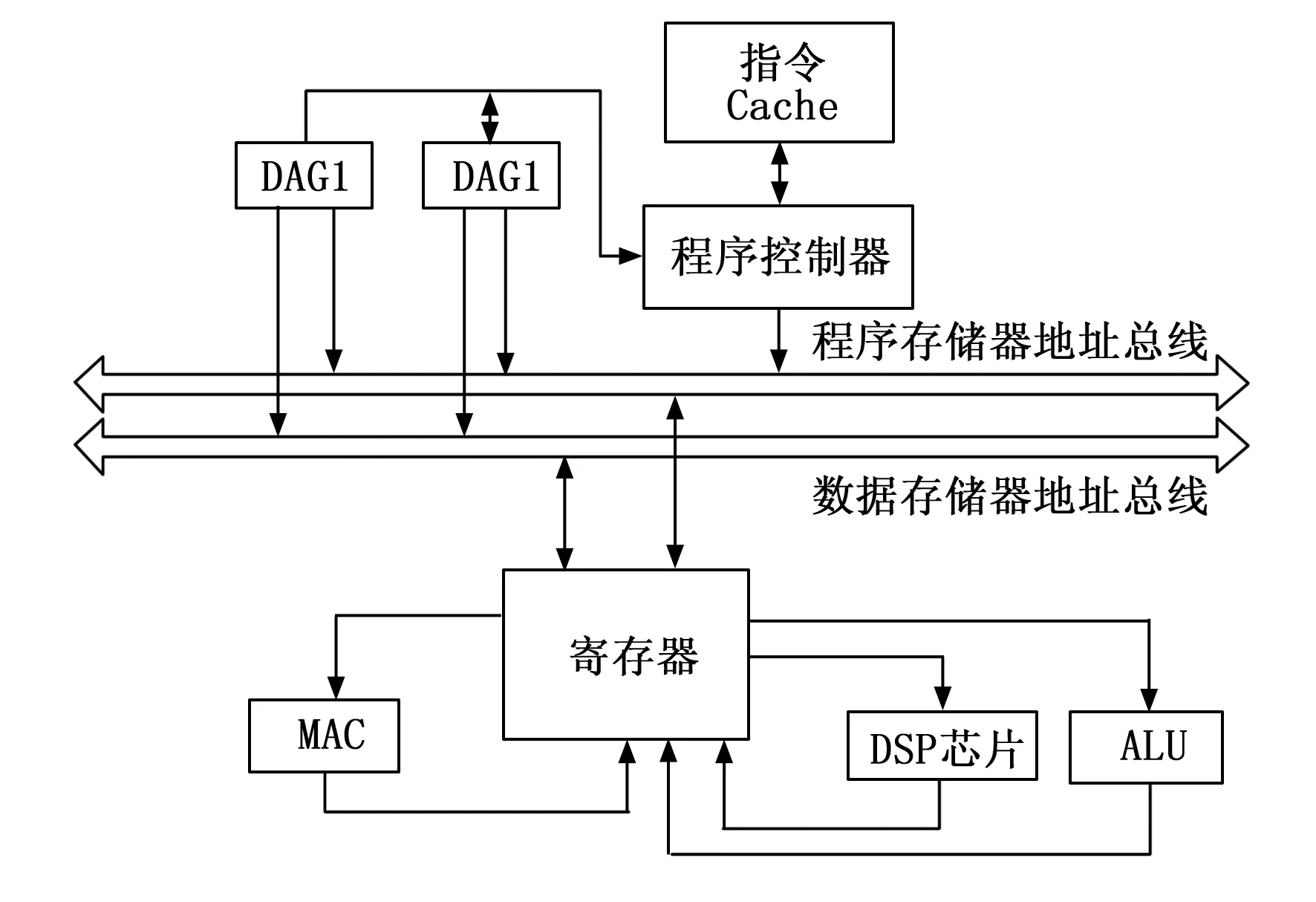
圖1 DSP數(shù)字信號處理器結構
DSP數(shù)字信號處理器在運行過程中,輸入信號經(jīng)過頻域濾波和采樣,再經(jīng)過模數(shù)轉換,將其轉換為數(shù)字流。DSP芯片采用A/D轉換后的采樣數(shù)據(jù),由 DSP芯片對其進行一定的處理,進而獲得連續(xù)的模擬波形。
1.3 爬壁機器人吸附控制器
爬壁機器人吸附控制器采用氣壓環(huán)和負壓環(huán)以實現(xiàn)爬壁機器人的雙閉環(huán)控制,其外環(huán)為負壓環(huán),內(nèi)環(huán)采用氣壓環(huán),氣壓與負壓反饋均利用傳感器來計算,根據(jù)吸附力的安全值與反饋量形成偏差,形成相應的PWM占空比,最后生成控制信號作用在爬壁機器人的驅(qū)動電機上,實現(xiàn)對運行參數(shù)的控制。爬壁機器人吸附控制器結構如圖2所示。
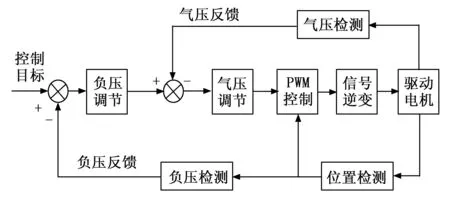
圖2 爬壁機器人吸附控制器結構
為降低電機在運轉狀態(tài)下的積分修正對系統(tǒng)的動力學特性的影響,必須在啟動和停止狀態(tài)下或較大的加速時,使用積分分離PID控制,也就是只加比例和微分運算,而不需要進行積分修正[6]。而在實際轉速與給定轉速之間的誤差小于某一特定值時,又會進行積分修正[7]。在吸附控制器的實際安裝過程中,其輸入端與DSP處理器設備相連,輸出端與爬壁機器人的驅(qū)動電機以及吸附單元相連,保證傳感數(shù)據(jù)以及控制信號傳輸效率的最大化。
2 爬壁機器人吸附控制系統(tǒng)軟件設計
2.1 構建爬壁機器人數(shù)學模型
此次研究中選擇負壓機器人作為研究對象,分別從組成結構和運動兩個方面,構建爬壁機器人數(shù)學模型,為吸附控制系統(tǒng)硬件設備的安裝提供參考。一個完整的爬壁機器人由行走機構、吸附機構、電源模塊、驅(qū)動裝置、通信模塊以及攜帶的作業(yè)工具等部分組成,吸氣機構的作用是制造一種向上的力來平衡機器人的重力,從而把它固定在墻上[8]。爬壁機器人的吸附情況會受吸附力大小、壁面情況、自身重量等因素的影響,吸附機構主要就是利用驅(qū)動電機對吸附終端的密封情況進行控制,從而實現(xiàn)對吸附力的調(diào)節(jié),因此在爬壁機器人吸附控制過程中,爬壁機器人吸附驅(qū)動電機結構如圖3所示。
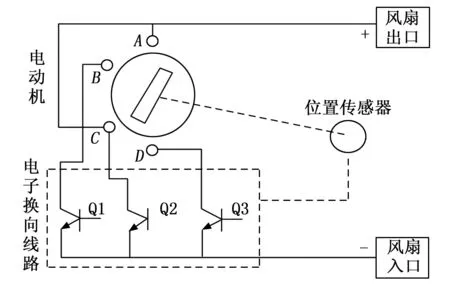
圖3 爬壁機器人吸附驅(qū)動電機結構
由于電子開關線的接通順序與轉子轉角是同步的,所以它可以控制機械整流器進行換向。爬壁機器人采用了無刷電機與離心風扇通過抱軸機構直接相連的方式,當驅(qū)動電機帶動離心風機轉動時,氣流在高速轉動的風機葉片間也隨之轉動,通過離心力將其從風機中拋出,進入大氣層,在風機入口處形成一個負壓,再由空氣中的空氣通過空氣的壓力補充進來[9]。在風機的持續(xù)轉動下,風機出口的氣流會持續(xù)地向外排放,當風機的速度達到一定的速度時,就會產(chǎn)生一個穩(wěn)定的負壓。爬壁機器人的運動狀態(tài)包括向上移動、向下移動、水平移動、轉向移動等,當爬壁機器人向上運動時,驅(qū)動輪的運動學方程可以表示為:
(1)
式中,F(xiàn)support、Fdrive、FTension和Fh分別為法向支持力、驅(qū)動力、壁面接觸帶來的張緊力以及電機對驅(qū)動輪的橫向力,變量Grobot為爬壁機器人的重力值,rContact為爬壁機器人與壁面接觸面的半徑,Mdrive為電機的驅(qū)動力矩,Mdrive的具體計算公式如下:
(2)
式中,L和l分別為爬壁機器人在水平和豎直方向上的距離,d為爬壁機器人中質(zhì)心與接觸面之間的法向距離[10]。按照上述方式能夠得出爬壁機器人在不同運行狀態(tài)下運動方程,將爬壁機器人的工作、運動機理與組成結構進行融合,得出爬壁機器人數(shù)學模型的構建結果。
2.2 利用DSP技術計算爬壁機器人吸附力
將爬壁機器人傳感器裝置實時采集的運行數(shù)據(jù)輸入到DSP數(shù)字信號處理器中,在DSP數(shù)字信號處理器的支持下,運行DSP技術對爬壁機器人傳感器裝置的實時采集數(shù)據(jù)結果進行處理。以爬壁機器人實時歐拉角為例,該參數(shù)的實時采集結果可以表示為:
(3)
式中,φ、φ和ψ對應的是爬壁機器人的俯仰角、偏航角和滾轉角的更新結果,δ為MPU6050傳感器的輸出數(shù)據(jù),φq、φq和ψq為爬壁機器人上一時刻轉向角分量的測量結果[11]。在獲得了新的歐拉角后,利用DMP計算出了目前的加速度和角速度,得出了該機器人的當前位置和航向角數(shù)據(jù)的采集結果。
在DSP數(shù)字信號處理器的支持下,運行DSP技術對爬壁機器人傳感器設備的實時采集數(shù)據(jù)結果進行處理,DSP技術的運行流程如圖4所示。
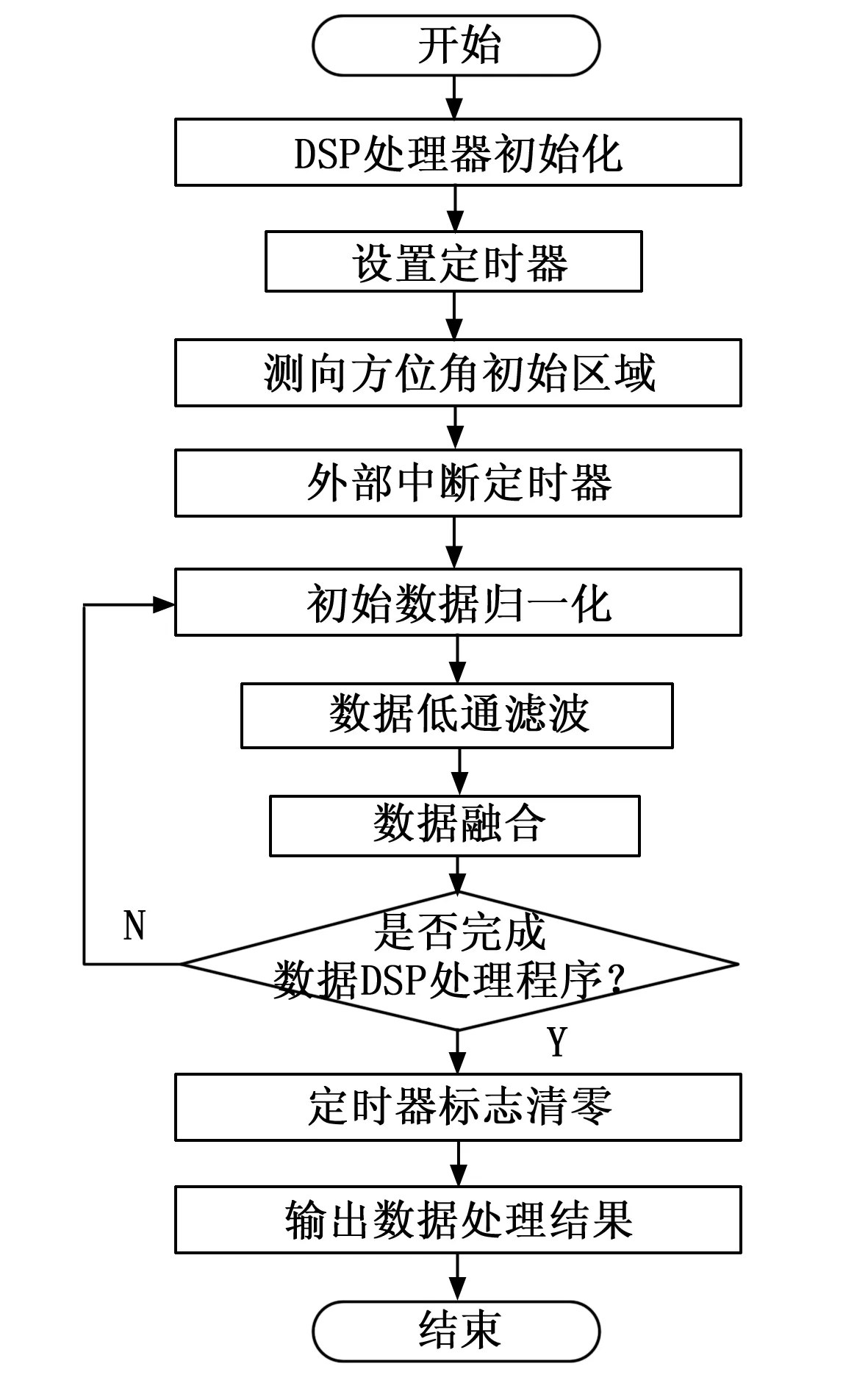
圖4 DSP技術運行流程圖
DSP技術的具體處理步驟包括數(shù)據(jù)歸一化轉換、數(shù)據(jù)濾波、數(shù)據(jù)融合三個步驟,其中數(shù)據(jù)歸一化轉換處理過程可以量化表示為:
y=lg10(x)
(4)
式中,x為傳感器采集的實時數(shù)據(jù),y為初始數(shù)據(jù)的歸一化處理結果。采用低通濾波的方式,得到有效濾波值。低通數(shù)據(jù)濾波的處理過程可以表示為:
y′(n)=κfilteringy(n)+(1-κfiltering)y(n-1)
(5)
式中,κfiltering為低通濾波系數(shù),y(n)和y(n-1)分別為當前濾波輸出值和歷史濾波輸出值[12]。最終將傳感器所有采集數(shù)據(jù)的濾波處理結果代入到式(6)中,度量任意兩個數(shù)據(jù)之間的相似度。
(6)
(7)
(8)
式中,μf為摩擦系數(shù),N對應的是爬壁機器人的負荷值[14]。按照上述方式得出爬壁機器人在任意時刻、任意作業(yè)位置上的吸附力計算結果。
2.3 確定爬壁機器人安全吸附條件
爬壁機器人作業(yè)時可能出現(xiàn)兩種危險情況,分別為機器人在壁面上的滑落和傾覆,并進行可靠性吸附條件的計算[15]。利用式(9)描述爬壁機器人以任意位姿在工作空間不發(fā)生滑移的受力平衡條件。
(9)
式中,F(xiàn)adsorbent,i和Fsupport,i分別為爬壁機器人中第i個吸附單元的吸附力和支持力[16]。在爬壁機器人所有吸附單元吸附力相等的情況下,得出爬壁機器人不滑落的安全條件為:
(10)
式中,β為機器人吸附單元與接觸面之間的夾角[17]。為了防止機器人傾覆,它必須保持爬壁機器人與墻壁不分離,所以支撐力必須大于0,由此得出爬壁機器人不傾覆的安全吸附條件為:
(11)
式中,?為爬壁機器人的移動角度,H和D分別對應的是爬壁機器人的移動高度和前后輪的垂直距離。按照上述流程,可以得出爬壁機器人在不同運動狀態(tài)下的極限吸附力,記為Flimit。
2.4 實現(xiàn)爬壁機器人吸附控制
以爬壁機器人吸附控制器為執(zhí)行機構,利用式(12)計算爬壁機器人吸附控制量:
ΔF=Flimit-Fadsorbent
(12)
將爬壁機器人的極限吸附力與實時吸附力的計算結果代入到式(12)中,即可得出吸附控制量的計算結果,若式(12)的計算結果為負值,則表示吸附控制方向向外,否則控制方向垂直作業(yè)面向內(nèi)。將爬壁機器人的吸附控制量轉換為電機的驅(qū)動量,生成相應的控制指令,直接作用在驅(qū)動電機上[18]。采用氣流循環(huán)理論,將風機排氣經(jīng)過一導向裝置,送至吸盤與進口之間的狹縫,在此過程中,排氣與進口氣流形成對流,以減少進口氣流的流速,減少進口氣流的泄漏。由于爬壁機器人吸附單元和壁面之間的間隙只有一個很小的間隙,所以只有很少的氣流進入到吸盤的內(nèi)部,并在那里形成了一層薄薄的氣膜[19-20]。在此基礎上,對氣流進口至離心式風機進氣道進行了氣膜壓強的控制和調(diào)整。在系統(tǒng)的實時吸附控制過程中,根據(jù)傳感器檢測到的數(shù)據(jù)對控制指令中的吸附壓力值進行更新,從而實現(xiàn)對爬壁機器人的自動吸附控制。
3 系統(tǒng)測試
系統(tǒng)測試的目的是檢驗此次設計的基于DSP技術的爬壁機器人吸附控制系統(tǒng)是否存在不符合系統(tǒng)運行規(guī)則的情況,分析系統(tǒng)在設計和運行過程中存在的錯誤,并驗證系統(tǒng)能否完成吸附控制。此次系統(tǒng)測試實驗采用對比測試的方式,設置文獻[2]基于ANSYS技術的吸附控制系統(tǒng)和文獻[3]基于旋翼負壓混合吸附技術的控制系統(tǒng)作為實驗的兩個對比系統(tǒng),在相同的實驗環(huán)境下,對比爬壁機器人的吸附控制效果,從而驗證此次設計系統(tǒng)在吸附控制方面的優(yōu)勢。
3.1 配置爬壁機器人樣機
選擇負壓式爬壁機器人作為系統(tǒng)測試的控制對象,根據(jù)吸附控制系統(tǒng)的應用要求,對爬壁機器人的樣機進行配置。負壓爬壁機器人樣機的配置材料選用的是強度高、韌性好的尼龍材料,為了輕量化設計,負壓爬壁機器人采用單風機和腔體式結構設計。樣機自重為90 g,整體尺寸為240 mm×240 mm×126 mm,爬壁機器人樣機內(nèi)置的電機型號為N20,供電電壓為12 V,主要用來支持驅(qū)動電機的運行。爬壁機器人樣機中設置4個吸附單元,每個吸附單元的有效作用面積為200 mm×100 mm。對各機械模塊進行裝配,打開電源,將爬壁機器人放置在水平作業(yè)面上,觀察其基本運動狀態(tài)、風機轉速、云臺舵機等運行情況,并對其進行相應的調(diào)整,直到其各項性能均能滿足要求。
3.2 準備爬壁機器人移動環(huán)境與控制任務
由于爬壁機器人在不同的移動環(huán)境下需要的吸附力不同,因此此次系統(tǒng)測試實驗選擇瓷磚、木材和玻璃三個壁面作為移動環(huán)境。上位機及控制終端使用藍牙通訊方式,其通信速率達到120 K波特率,同時可以向使用者提供串口數(shù)據(jù),具有很好的抗干擾性,最遠可達到250 m。為了保證實驗結果的可信度,系統(tǒng)測試實驗設置多個控制任務,部分控制任務的設置情況如表1所示。
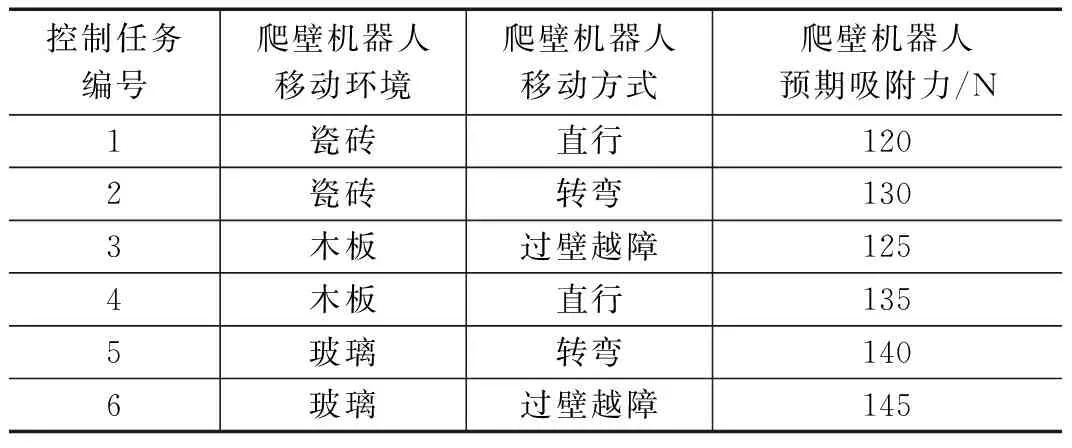
表1 爬壁機器人控制任務設置表
實驗設置爬壁機器人30個控制任務,并將其轉換為控制器能夠直接讀取的程序輸入到爬壁機器人中。
3.3 設置系統(tǒng)吸附控制測試指標
設置爬壁機器人吸附力控制誤差和傾覆風險系數(shù)作為系統(tǒng)的量化測試指標,其中,吸附力控制誤差的數(shù)值結果如下:
εF=|Fcontrol-Fexpect|
(13)
其中:Fcontrol為系統(tǒng)控制下的實際吸附力,F(xiàn)expect為設置的預期吸附力。在實際測量過程中,爬壁機器人的吸附力由于其結構和儀器的限制而不能直接進行相應的測量。因此,此次系統(tǒng)測試實驗中,利用等值測量法來測量爬壁機器人的吸附力,就是將爬壁機器人附著在天花板上,將重物掛在爬壁機器人身上,然后用來測量爬壁機器人落地時的負重,進一步換算計算出爬壁機器人的最大吸附力,重物重力減去機器人自重得出爬壁機器人的吸附力,從而確定Fcontrol的具體取值,而Fexpect的取值可通過設置的控制任務直接得出。吸附控制系統(tǒng)作用下,爬壁機器人傾覆風險系數(shù)的測試結果可以表示為:
(14)
將實際控制吸附力、摩擦力以及爬壁機器人樣機的重力數(shù)據(jù)代入到式(14)中,即可得出爬壁機器人在執(zhí)行移動任務過程中的傾覆風險系數(shù)。最終計算得出吸附力控制誤差越小,爬壁機器人傾覆風險系數(shù)越小,證明對應系統(tǒng)的吸附控制效果越好。
3.4 系統(tǒng)測試過程與結果分析
將爬壁機器人樣機分別放置在準備的移動環(huán)境中,導入并運行輸入的控制任務,同時啟動此次設計的爬壁機器人吸附控制系統(tǒng),得出系統(tǒng)的吸附控制結果。
3.4.1 瓷磚壁面運動吸附控制測試
在瓷磚壁面環(huán)境下,得出的爬壁機器人吸附控制系統(tǒng)執(zhí)行結果如圖5所示。
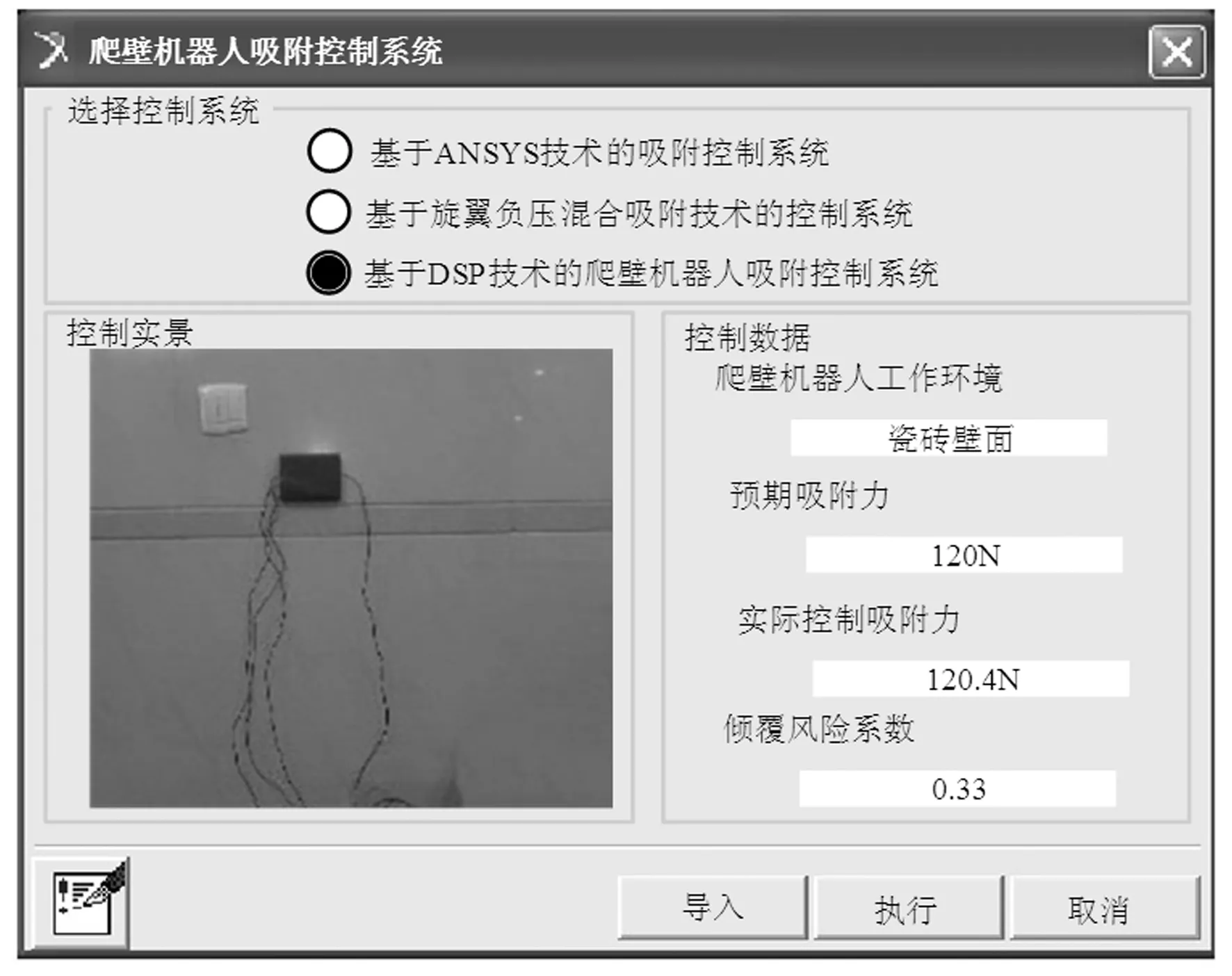
圖5 瓷磚壁面環(huán)境中爬壁機器人吸附控制結果
按照上述流程,運行基于ANSYS技術的吸附控制系統(tǒng)和基于旋翼負壓混合吸附技術的控制系統(tǒng)的對應程序,得出相應的吸附控制結果。讀取爬壁機器人的實時受力數(shù)據(jù),經(jīng)過式(13)和式(14)的計算,得出系統(tǒng)吸附控制的測試結果,如圖6所示。
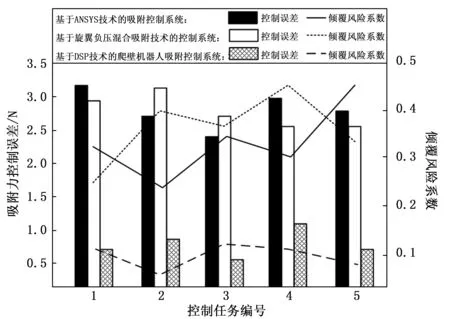
圖6 瓷磚壁面環(huán)境中爬壁機器人吸附控制測試結果
從圖6中可以看出,此次設計吸附控制系統(tǒng)的吸附力控制誤差明顯低于兩個對比吸附控制系統(tǒng),且傾覆風險系數(shù)能夠控制在0.4以下。
3.4.2 木板壁面運動吸附控制測試
重復上述吸附控制操作,得出木板壁面環(huán)境下,爬壁機器人的吸附控制結果以及控制測試結果,分別如圖7和圖8所示。
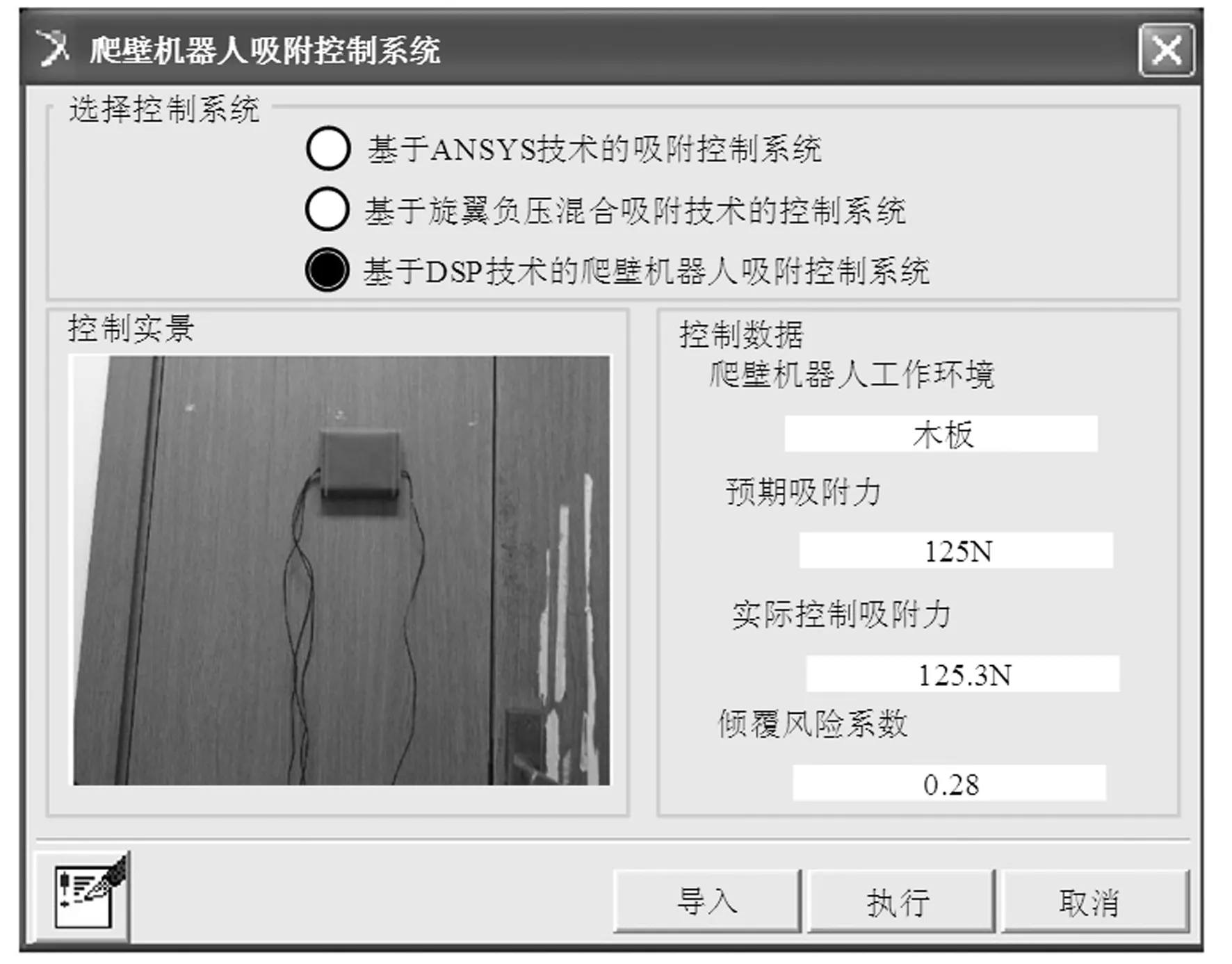
圖7 木板壁面環(huán)境中爬壁機器人吸附控制結果
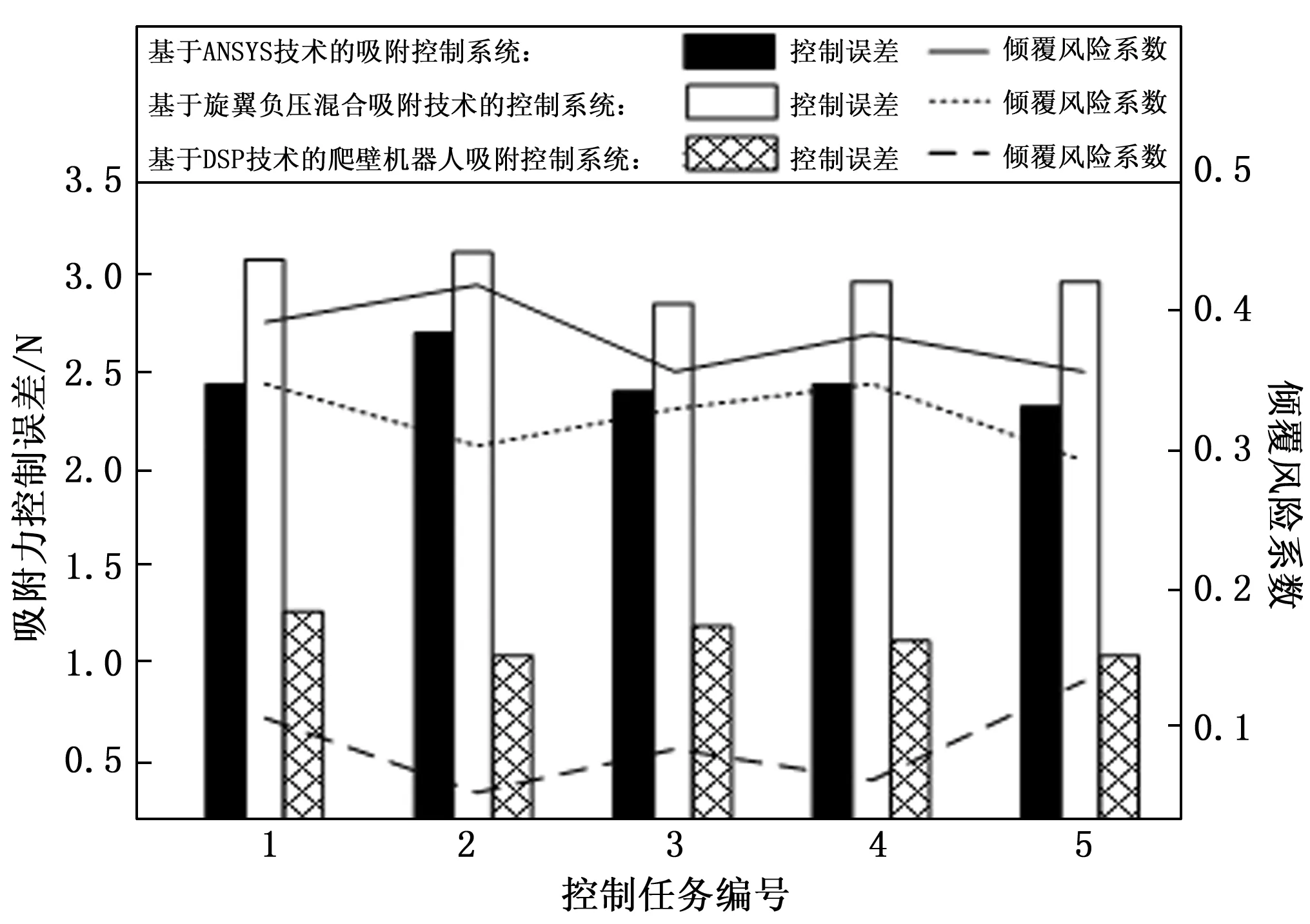
圖8 木材壁面環(huán)境中爬壁機器人吸附控制測試結果
對圖8中的數(shù)據(jù)進行平均值計算,得出基于ANSYS技術的吸附控制系統(tǒng)的吸附力控制誤差和傾覆風險系數(shù)的平均值分別為2.44 N和0.61,基于旋翼負壓混合吸附技術的控制系統(tǒng)的平均吸附力控制誤差和平均傾覆風險系數(shù)分別為3.07 N和0.56。而此次設計系統(tǒng)下,平均吸附力控制誤差和平均傾覆風險系數(shù)對應的是1.28 N和0.23。由此可知,此次設計吸附控制系統(tǒng)在木材壁面環(huán)境中的吸附控制效果較好。
3.4.3 玻璃壁面運動吸附控制測試
在玻璃壁面環(huán)境下,爬壁機器人運動吸附控制數(shù)據(jù)的統(tǒng)計結果如表2所示。
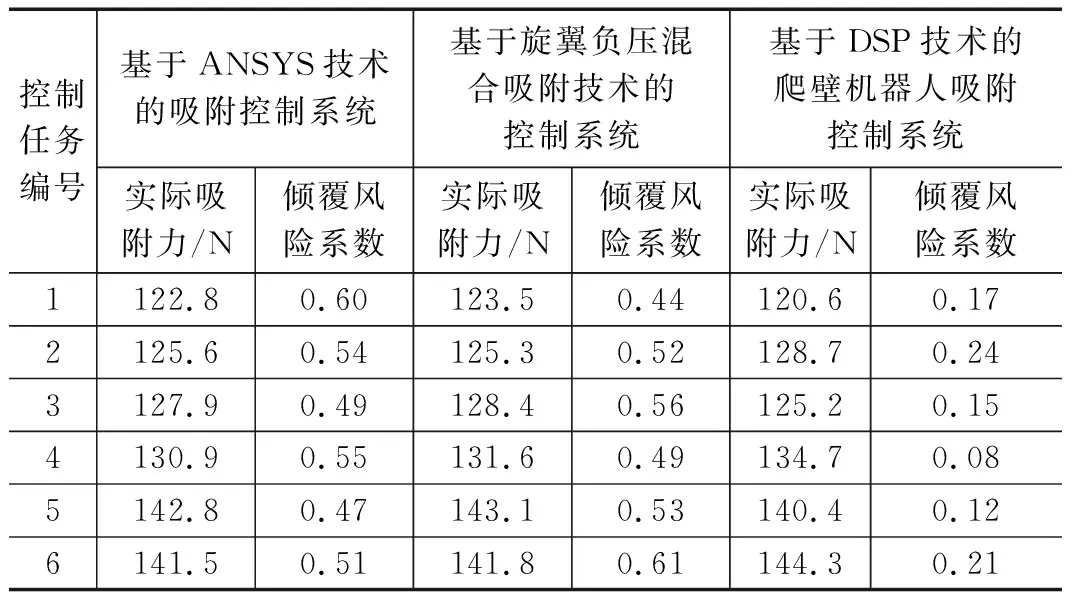
表2 玻璃壁面中爬壁機器人吸附控制測試數(shù)據(jù)表
對表2中的數(shù)據(jù)進行平均值計算,得出基于ANSYS技術的吸附控制系統(tǒng)和基于旋翼負壓混合吸附技術的控制系統(tǒng)的吸附力控制誤差的平均值為3.42 N和3.55 N,而此次設計系統(tǒng)的平均吸附力控制誤差為0.58 N。三種控制系統(tǒng)下傾覆風險系數(shù)的平均值分別為0.53、0.53和0.16。由此證明,此次設計的基于DSP技術的爬壁機器人吸附控制系統(tǒng)的吸附控制效果較好。
4 結束語
由于爬壁機器人的主要工作面為垂直壁面,能夠突破人類操作在高度方面的局限性,因此在建筑清潔、噴涂以及造船等行業(yè)具有較高的應用價值。此次設計的爬壁機器人吸附控制系統(tǒng),通過DSP技術的應用,能夠?qū)崿F(xiàn)對爬壁機器人實時運行信號的精準分析,從而得出吸附控制量與控制方向的準確判斷。通過樣機實驗,驗證了此次設計控制系統(tǒng)能夠支持爬壁機器人在多種壁面上穩(wěn)定吸附的能力,具有較好的吸附控制效果,提高了爬壁機器人工作的安全性能。
