基于行駛軌跡的車輛換道行為預測方法研究
2023-03-10 08:17:12周立宸鄧建華
黑龍江交通科技 2023年1期
周立宸,鄧建華
(蘇州科技大學土木工程學院,江蘇 蘇州 215011)
1 引 言
近年來,我國城鎮化的進程加快,城鎮人口數量隨之急速增長,與此同時,汽車保有量也大幅增加,從而不斷影響著城市交通的運行安全,而換道行為作為主要因素之一致使交通事故頻發[1]。換道行為發生時,易引發與周圍車輛駕駛者駕駛行為的沖突,若能提前預測車輛是否會發生換道行為,就能有效降低由于車輛換道導致交通事故的概率,因此對車輛換道行為的預測研究成為熱點。
2 車輛行為特性分析及指標選取
2.1 數據介紹

圖1 US-101公路段示意圖
選取的US-101公路段行車軌跡數據來自于美國NGSIM研究項目,它提供了大量可供換道行為研究的車輛軌跡數據。該公路基本情況如圖1所示,道路1#至5#為主干道,6#為集散車道,7#以及8#為出入匝道。Thiemann等人[2]認為NGSIM中的換道軌跡數據為研究換道提供了良好的基礎的結論,Yang等人[3]與Dou等人[4]基于NGSIM數據完成了換道模型的校準和驗證。由此,NGSIM數據滿足本文對車輛換道行為預測的研究。
2.2 數據平滑處理
由于車輛軌跡數據采集與提取過程中會出現一定的波動,有必要對其進行平滑處理。本文利用LOESS局部加權回歸法,且選擇降速更快,平滑效果更好的權重函數tricube[5],公式如下
(1)
ω(t0,ti)=(1-μ3)3
(2)
式中:Δ(t0)為t0點在平滑范圍內與其最近一點的距離。μ(t0,ti)為ti到t0的歸一化距離。ω(t0,ti)為以t0為中點時ti的權重。
2.3 換道過程分析
將整個換道過程分為換道準備階段、換道實施階段、調整恢復階段,如圖2所示。

圖2 換道階段劃分
換道決策階段:駕駛者產生換道意圖并在車內感知周圍交通信息,信息主要有自身車輛車速、加速度、與前后車間距等。此時駕駛者會評估換道的可行性,若存在換道時機,則準備開始換道操作。
換道實施階段:車輛持續發生換道行為,駕駛者觀察周圍交通狀況,保持方向盤轉動以及加減速踏板的使用,完成并線、壓線、越線的操作。
調整恢復階段:駕駛者完成車輛變道行為,在目標車道上穩定行駛。
2.4 車輛換道起止點截取
換道行為實質是車輛在行駛過程中發生的連續橫向位移,通過程序設計對車輛換道前后的橫向位移量進行遍歷,將換道前后發生連續橫向位移的數據段進行截取并進行統計,隨機選取車輛,對其橫向位移數據進行展示,如表1所示。

表1 車輛部分橫向位移數據
在截取完成后,計算出車輛在換道時的平均橫向位移量為3.26 m,觀測路段車道寬度為3.5 m,基本符合換道位移距離的實際情況,截取效果如圖3所示。

圖3 換道起止點截取效果
2.5 換道車輛橫向速度分析
NGSIM原始數據統計的車速為車輛行駛時的瞬時速度,對其分解得到換道車輛換道起點處的橫向速度,其分布如圖4所示,范圍處于6~14 m/s的車輛占總體換道樣本的84.8%,分布較分散。

圖4 換道起點處車輛橫向速度分布
2.6 換道車輛偏角分析
車輛換道時最直觀的表現是車輛的偏角,本文設定轉角為車身豎直方向與垂直于車道方向的夾角,而未發生換道行為車輛偏角趨近于90°,車輛行駛過程中偏角θ如圖5所示。

圖5 車輛偏角示意圖
計算出換道起點處車輛的偏角,其分布如圖6所示,偏角分布集中于85°~89°,頻率為86.4%,換道起點處車輛角度偏轉明顯。

圖6 換道起點處車輛偏角分布
2.7 換道車輛車頭間距分析
車輛在行駛過程中進行換道受自身車輛與前方車輛的相對距離的直接影響。如圖7所示,換道車輛在換道起點處車頭間距集中于5~25 m之間,占比69.5%,表明大部分車輛愿意在于前車距離較為安全時進行換道。
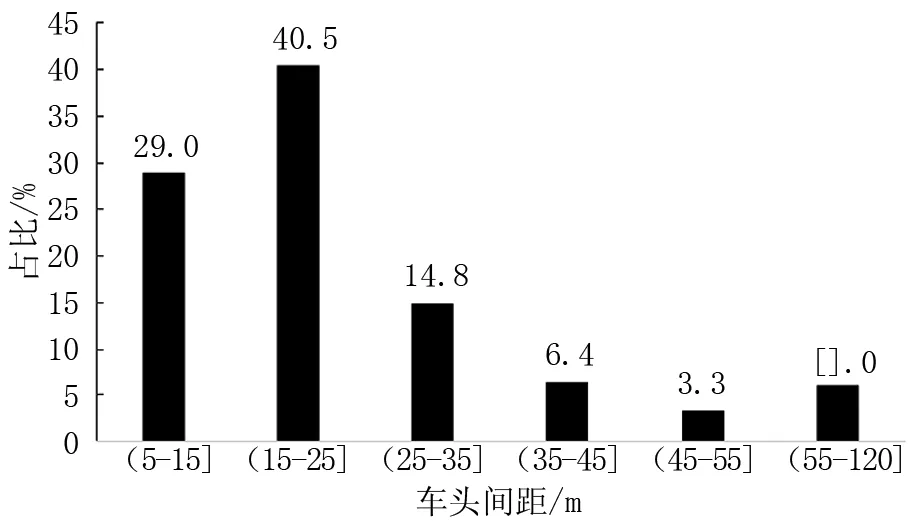
圖7 換道起點處車頭間距分布
2.8 隨機森林參數指標選取
隨機森林由Leo Breiman(2001)[6]提出的一種分類算法。隨機森林將多個決策樹合并,每一個需要測試的數據集可以被每一棵樹進行分類,分類的結果再經過統計后匯總得到最可能的分類。使用python中的sklearn模塊進行,建立隨機森林模型。
輸入指標數據進行訓練,對換道和未換道數據進行擬合,根據特征重要性排序進行篩選,最終選取的指標為:橫向速度,偏角,車頭時距,加速度,縱向速度,車頭間距。
3 換道預測研究
3.1 級聯LSTM模型構建
對于換道預測的研究,Pentland[7]等構建并訓練隱馬爾科夫模型,預測了駕駛者換道意圖。谷新平等[8]提出了一種優化的支持向量機模型,對換道行為擁有較高的識別率。然而換道行為是一個連續的過程,LSTM能很好的解決這類時序問題,本文提出一種級聯LSTM模型,由前一個LSTM網絡提取特征,輸出特征序列傳輸給后一個LSTM網絡,最終輸出預測結果,結構如圖8所示。

圖8 級聯LSTM預測模型結構
3.2 預測結果分析
對于換道行為預測結構的分析,采用Acc、Recall以及Precision三種評價指標對級聯LSTM以及單一LSTM進行對比,對比結果如表2所示。

表2 預測結果對比
可以看出,級聯LSTM模型預測換道行為的發生準確率達到93.6%,證明本文構造級聯LSTM模型對換道行為進行預測的方法可行,同時,在準確率、召回率以及精確率三個評價指標方面都高于普通LSTM模型。
4 結 論
通過對行駛車輛軌跡數據的研究,分析了換道車輛在換道行為發生時刻的部分行為特性,通過建立隨機森林模型對參數指標進行選取,并提出一種級聯LSTM模型對換道行為進行預測,結果表明級聯LSTM預測準確率達到93.6%,高于單一LSTM預測模型。研究可應用于行駛車輛的換道預警,也可為自動駕駛深度學習提供一定的參考。
同時,研究仍存在不足,受限于數據內容,沒有考慮車輛與駕駛者自身相關的因素如情緒、性格偏好等,未來會進一步結合其它影響換道行為發生的因素進行更深入的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
光學精密工程(2016年6期)2016-11-07 09:07:19