寬窄定子極軸向磁通開關磁阻電機的設計與分析
2023-03-11 09:39:52于豐源閆文舉劉永強董林杰
電工技術學報 2023年5期
關鍵詞:結構
于豐源 陳 昊 閆文舉 劉永強 董林杰
寬窄定子極軸向磁通開關磁阻電機的設計與分析
于豐源1,2陳 昊1,2閆文舉1,2劉永強1,2董林杰1,2
(1. 中國礦業大學電氣工程學院 徐州 221116 2. 徐州市新能源電動車技術與裝備重點實驗室 徐州 221116)
針對開關磁阻電機存在轉矩密度較低、轉矩脈動較大的缺點,提出一種新型寬窄定子極軸向磁通開關磁阻電機。該電機采用并行式雙定子結構,左右定子盤通過共享一個轉子段保持短磁通路徑,定子齒極為寬極和窄極交錯排列,集中式繞組纏繞在定子寬極上,定子窄極上則不纏繞繞組,僅為磁路提供磁通路徑。由于每個槽只放置一相繞組,使得繞組在磁、熱和機械上的隔離程度更高,保證了電機的可靠性。該文首先介紹所提電機的拓撲結構和運行原理;根據功率方程設計了部分初始結構參數,利用有限元方法分析了尺寸參數對電機性能的影響,并利用田口算法對選取的4個關鍵尺寸參數進行了多目標優化,改進了電機性能;然后計算分析了所提電機結構的動、靜態性能;最后,制造了樣機,實驗結果驗證了所提電機結構的有效性。
軸向磁通開關磁阻電機 有限元方法 多目標優化 電磁性能
0 引言
近年來,開關磁阻電機(Switched Reluctance Motor, SRM)因其結構簡單堅固、容錯性能好且兼具較大的起動轉矩和較寬的調速范圍,被逐漸應用在電動汽車、航空航天和磁懸浮等領域[1-8]。但是由于開關磁阻電機同時也存在轉矩密度較低、轉矩脈動較大的問題,限制了其在現階段的大規模應用。隨著近年來工業制造水平的提高,軸向磁通電機(Axial Flux Machine, AFM)由于具有軸向長度短、功率密度高的優點,逐步引起了人們的注意。AFM的種類包括軸向磁通永磁電機、軸向磁通感應電機和軸向磁通開關磁阻電機等。學者們圍繞AFM的拓撲結構、數學模型、優化設計和控制策略等方面進行了很多研究[9-11]。
目前,國內外對于軸向磁通開關磁阻電機(Axial flux Switched Reluctance Motor, AFSRM)的研究,主要集中在新型拓撲的提出、結構參數的設計優化以及性能的分析對比上[12-22]。文獻[12]提出了一種四相8/6極模塊化軸向磁通SRM,定轉子均采用U型結構,實現了電負荷與磁負荷的解耦設計,有效提高了電機的轉矩密度和效率。南京理工大學李強教授團隊提出了一種轉子分塊型AFSRM結構,基于等效磁路法推導了其三維數學模型,通過制造樣機證明了所提結構在過載條件下具有良好的性能[13-14]。文獻[15]提出了一種6/4極單定子單轉子AFSRM,設計了關鍵尺寸參數,并與傳統徑向磁通SRM做了比較,表明在相同工況下所提AFSRM結構能夠輸出更高的轉矩;同時對比了單定子與雙定子AFSRM結構的軸向電磁力,表明雙定子AFSRM結構具有減小轉子軸向電磁力的作用。印度理工大學專家提出并設計了一種新型12/16極雙分塊轉子AFSRM結構,通過三維有限元法和實驗驗證了結構的有效性;隨后提出了一種改進型12/8極雙分塊轉子AFSRM結構,獲得了更寬的恒功率轉速范圍,并采用偏移相鄰分塊轉子段距離的方法有效降低了電機的轉矩脈動[16-17]。韓國慶星大學Lee Dong-Hee教授團隊提出了一種單定子單轉子集中繞組AFSRM結構,保持轉矩輸出能力的同時節省了銅體積,具有鐵耗低、軸向長度短的優點,但是由于繞組安裝在單側定子上,在其運行過程中一直存在不平衡的磁拉力,會影響電機的使用壽命[18]。
此外,還有學者通過改進電機鐵心材料來提高AFSRM的轉矩密度。華中科技大學曲榮海教授團隊將有取向硅鋼作為電機鐵心材料應用在一種集中繞組雙定子分塊定子AFSRM上,研究表明有取向硅鋼材料的應用能夠有效提升SRM的轉矩密度,但有取向硅鋼材料也存在成本較高的問題[19-20]。
英國紐卡斯爾大學B.C.Mecrow教授在2003年提出了一種12/10寬窄定子極SRM(Wide-Narrow StatorPole SRM, WNS-SRM)結構,在保證與傳統12/8極SRM相同輸出功率的同時,降低了銅重[23]。隨后,文獻[24]提出了一種6/5極分塊轉子WNS-SRM,仿真分析和實驗結果證明了在保持相同定子外徑的條件下,相比于傳統12/8極SRM,所提6/5極分塊轉子WNS-SRM可以產生更高的轉矩。江蘇大學孫曉東教授團隊詳細比較了不同轉子極數下WNS-SRM結構性能差異,并通過制造一臺16/10極的WNS-SRM樣機驗證了電機性能[25]。文獻[22]將這種寬窄定子極分塊轉子結構應用在12/10/12極雙定子SRM上,并與傳統12/8/12極雙定子SRM做了性能對比。結果表明這種結構不僅在低速區域運行效率更高,而且得益于較低的銅重,提升了電機的轉矩/功率密度。
本文在對文獻[20, 23, 26]進行深入研究的基礎上,綜合AFSRM和WNS-AFSRM的優點,提出了一種新型寬窄定子極雙定子AFSRM(Wide-Narrow Pole Double Stator AFSRM, WNS-AFSRM)。本文首先介紹了所提電機的結構和運行原理,給出了電機功率方程,介紹了設計方法,并通過田口算法對電機關鍵尺寸參數進行了優化,確定了電機的最終結構參數;然后詳細分析了電機的動靜態性能,包括磁通密度特性、磁鏈特性、轉矩特性和電感特性等,并與一臺單定子結構的WNS-AFSRM做了性能對比;最后,制造了樣機,通過實驗驗證了所提電機新型結構的有效性。
1 拓撲結構與原理
圖1所示為新型三相12槽10極WNS-AFSRM結構示意圖。從圖1中可以看出,新型WNS-AFSRM采用并行式雙定子結構,在本文中被稱為左、右定子,兩個定子各有12個極,齒極相對地放置在內轉子兩側,兩個定子共用一套轉子結構。定子極分為寬極和窄極,其中寬極為勵磁極,窄極為輔助極,從圖1b中可以看出,繞組配置采用集中繞組的聯結方式,纏繞在勵磁極上,單個定子槽內只存在一相繞組。為了降低損耗,內轉子由10個相同的轉子鐵心塊嵌入在不導磁不導電的轉子盤中組成,轉子盤由環氧樹脂層壓材料制成。外定子結構散熱方便,可獲得較大的散熱面積;內轉子質量輕,表面無凹凸,圓環形的轉子結構比傳統凸極形狀的SRM具有更低的風阻,損耗更小。

圖1 新型12槽10極WNS-AFSRM整體結構示意圖
為了更直觀地觀察電機繞組聯結方式和磁通路徑,將三維結構的WNS-AFSRM在外徑處沿圓周方向展開成直線電機形式,如圖2所示。繞組采用集中式繞組配置,單側定子采用NNNSSS的繞組配置方式,相對的左右定子勵磁方向相反。

圖2 WNS-AFSRM繞組配置示意圖
如圖2的繞組結構所示,每相線圈分為四個左定子槽和四個右定子槽,左、右定子勵磁相反。在一側定子中,徑向垂直相對的線圈相互串聯,然后再和另一側定子中相同位置的繞組相串聯成為一相。共分成A、B、C三相,由三相不對稱半橋功率電路進行控制。A相繞組控制電流可產生旋轉轉矩,B、C相分別位于距A相旋轉方向的60°和120°位置。由于左右定子的激勵相反,WNS-AFSRM具有不同于傳統AFSRM的電磁特性。圖3a和圖3b分別顯示電機對齊和不對齊位置的磁通路徑。從圖3a可以看出,在不對齊位置左右定子產生的磁通相互抵消,作為磁通抵消的結果,低的不對齊電感幾乎不受飽和影響,能獲得較小的不對齊磁鏈。從圖3b可以看出,在對齊位置,左右定子產生的磁通路徑相互疊加。

圖3 特殊位置WNS-AFSRM磁通路徑示意圖
所提新型WNS-AFSRM結構具有以下特點:①采用端部繞組不重疊、線圈端部較短的集中繞組布局,每個槽只放置一相繞組,使得繞組在磁、熱和機械上的隔離程度更高。②外定子結構可獲得較大的散熱面積,雙定子結構能有效地減小電機轉子軸向電磁力。③由于不對齊位置左右定子產生的磁通相互抵消,電機具有較小的不對齊磁鏈,獲得了良好的最大、最小電感比。④所有分段轉子嵌入由環氧樹脂層壓材料制成的轉子支架中,圓環形的轉子盤能降低風阻,抑制振動。
為了初步驗證WNS-AFSRM的磁通路徑和運行原理,在有限元軟件Altair Flux中建立了將電機沿外徑處展開的二維直線電機模型。圖4給出了對B相繞組施加30A電流時,電機對齊與不對齊特殊位置的磁力線分布圖。可見磁通路徑僅經過相鄰定、轉子齒極閉合,這種短磁路的設計能有效提高電機的電磁利用率并降低鐵耗。

圖4 WNS-AFSRM特殊位置磁力線分布圖
2 電機設計與優化
2.1 設計指標與設計原則
新型WNS-AFSRM的設計性能指標見表1。額定功率為1 250W,額定轉速為600r/min,且能夠恒功率調速到1 000r/min。
表1 新型WNS-AFSRM設計性能指標
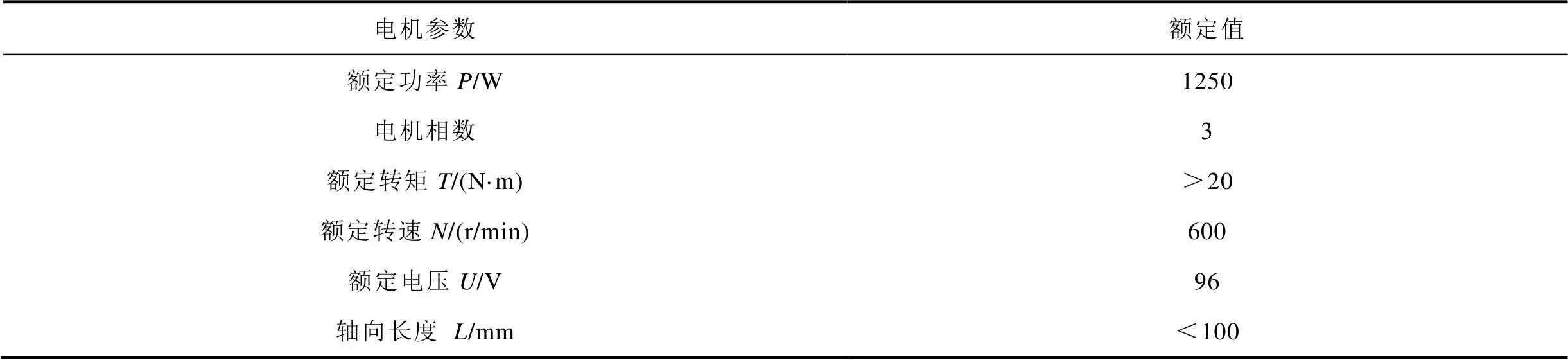
Tab.1 Parameters of the drive system of the WNS-AFSRM
由文獻[20]可知,雙定子、單轉子型AFSRM電機功率方程為


式中,a和u分別為電機在對齊位置與不對齊位置的電感值。電機電負荷和磁負荷方程可分別表示為
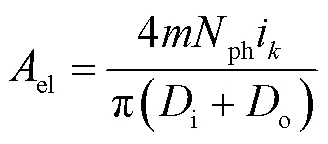
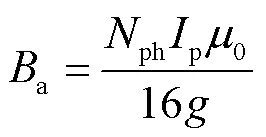
式中,ph為每相繞組匝數;為電機相數;i為相繞組電流;p為相電流峰值;0為真空磁導率;為電機單邊氣隙長度。
因此,當電機的電、磁負荷和轉速確定后,AFSRM輸出功率僅與最大、最小電感比值和徑向表面積有關,而與電機軸向長度無關[16, 20]。這與傳統徑向磁通SRM的輸出功率還和鐵心軸向疊壓長度有關不同。本文設定o為175mm,i為101mm。
為了保證電機在不同半徑處的槽滿率,在定子內徑處的槽寬仍能滿足繞線要求,因此定子槽采用平行槽結構。即在不同半徑下的定轉子槽寬為定值,而定子極弧角度是一個隨半徑變化的變量。同時為了保證定轉子極的接觸面積,轉子槽同樣也采用平行槽結構。假設半徑為i,則定子寬極極弧角度可以表示為

式中,s為定子極數,本文取12;so為定子槽寬。則定子窄極極弧角度可以表示為

轉子極弧角度可以表示為

式中,r為轉子分塊數,本文取10;ro為轉子槽寬。
同理,定子寬極極靴、定子窄極極靴和轉子極靴極弧角度可以分別表示為

式中,sso為定子極靴槽寬;rso為轉子極靴槽寬。為了保證不對齊位置處的磁阻最大,使電機獲得最小的不對齊位置電感,要有sso=rso[16,20]。為表述清楚,后文統一用sro來表示定轉子極靴槽寬。
綜合徑向磁通寬窄定子極SRM和雙定子AFSRM的設計準則[16,20,28],所提新型WNS-AFSRM的設計規則總結如下:①為了保證電機在不同半徑處的槽滿率,在內徑處的槽寬仍能滿足繞線要求,定轉子槽采用平行槽結構;②因為兩個輔助極將承載一個勵磁極的回流磁通量,勵磁極寬度應為輔助極寬度的2倍;③為了保證轉子或定子都不會對不對齊位置磁導率造成影響,轉子段之間的間隙寬度應等于定子槽開口的寬度;④為了保證定子極極體與極尖的磁通密度相等,勵磁定子極體的寬度應等于對齊位置上一個轉子段與齒尖重疊寬度的兩倍。
圖5給出了電機主要尺寸參數示意圖,圖6給出了設計流程。

圖5 電機尺寸參數示意圖

圖6 WNS-AFSRM設計流程
2.2 結構尺寸變化對電機性能的影響
在推導了電機功率、電負荷和磁負荷方程,并根據圖6所示的流程完成了對電機尺寸參數的初始設計后,通過修改部分結構參數可以獲得不同的電機輸出效果。本文采用有限元分析的方法來分析結構尺寸變化對電機轉矩輸出性能的影響。首先選取定子軛高sy、定子槽寬so、定轉子極靴槽寬sro、轉子極靴長rs、轉子極長rp和轉子槽寬ro六個參數,分析單一參數變化對輸出轉矩情況的影響。
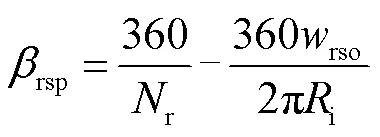
圖7a~圖12a為單獨給A相繞組施加額定電流(30A)時,靜態轉矩隨尺寸參數變化的情況;圖7b~圖12b則給出了電流從0增加到40A時,平均靜態轉矩值隨尺寸參數變化的情況。每次分析都保持其他參數固定,而只改變所分析參數的數值。
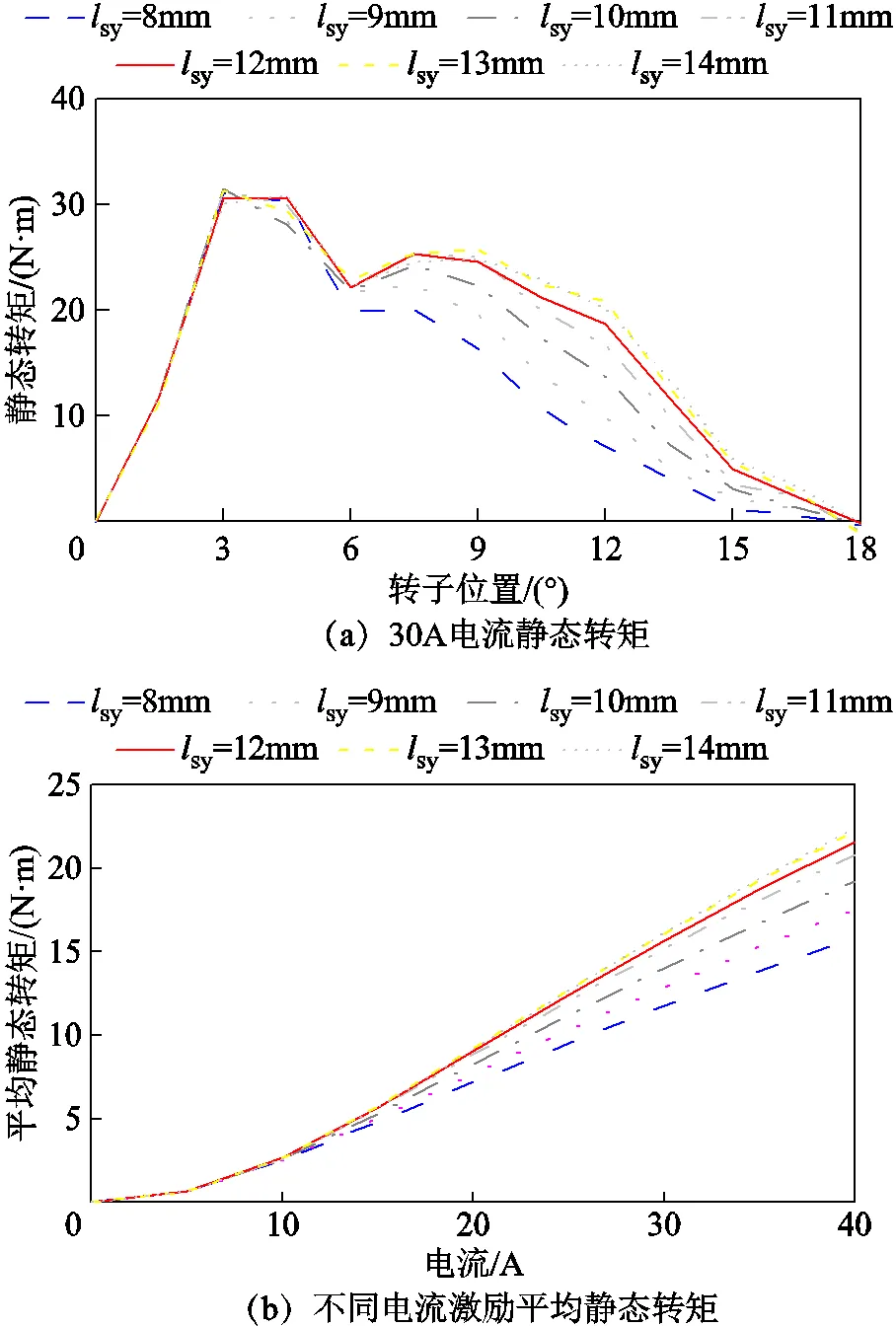
圖7 不同定子軛高lsy對電機轉矩的影響
對于不同的定子軛高sy,靜態轉矩波形隨轉子位置的變化如圖7所示。由圖7a可以看出,當施加30A電流時,不同的定子軛高sy對靜態轉矩波形影響較大;圖7b的平均靜態轉矩隨電流變化結果證明隨著定子軛高sy從8mm增加到14mm,靜態轉矩是逐漸增大的,但增加的趨勢在12mm后逐漸放緩,即在一定范圍內增大sy是有利于提升靜態轉矩的。同時過大的sy會導致鐵心材料增加,進而造成電機質量和成本增加。綜合考慮轉矩輸出能力和電機質量,定子軛高sy選擇為12mm。
對于不同的定子槽寬so,靜態轉矩隨轉子位置的變化如圖8所示。由圖8a可以看出,當施加30A電流時,不同的定子槽寬度so對靜態轉矩波形影響較大;圖8b的平均靜態轉矩隨電流變化結果證明定子槽寬so從19mm減小到13mm時,靜態轉矩是逐漸增大的。但是過小的so會導致鐵心材料的增加和線圈繞制空間的減小。
對于不同的定轉子極靴槽寬sro,靜態轉矩隨轉子位置的變化如圖9所示。圖9b的平均靜態轉矩隨電流變化結果證明定轉子極靴槽寬sro從4mm增加到6mm時,靜態轉矩變化幅度不大,但由圖9a可以看出,當施加30A電流時,不同的定轉子極靴槽寬sro對轉矩脈動平滑系數度較大。

圖8 不同定子槽寬wso對電機轉矩的影響
圖9 不同定轉子極靴槽寬wsro對電機轉矩的影響
對于不同的轉子極靴長rs,靜態轉矩隨轉子位置的變化如圖10所示。由圖10a可以看出,當施加30A電流時,不同的轉子極靴長rs對轉矩脈動平滑系數度較大。圖10b的平均靜態轉矩隨電流變化結果證明轉子極靴長rs從1mm增加到5mm時,靜態轉矩變化幅度不大。
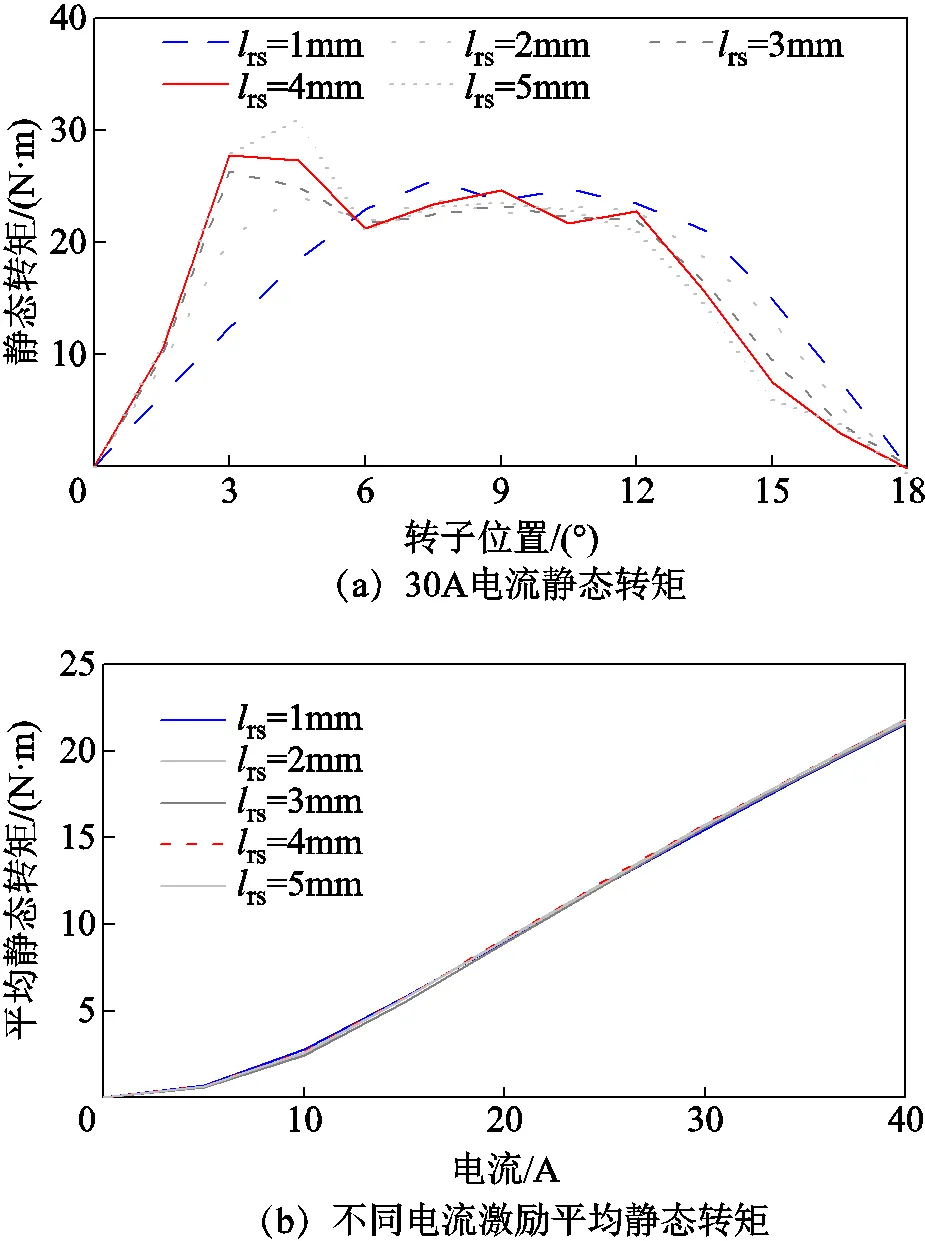
圖10 不同轉子極靴長lrs對電機靜態轉矩的影響
對于不同的轉子極長rp,靜態轉矩隨轉子位置的變化如圖11所示。由圖11a可以看出,當施加30A電流時,隨著轉子極長rp從15mm增加到22mm,靜態轉矩是逐漸增大的,但增大的趨勢逐漸放緩。即在一定范圍內增大rp是有利于提升靜態轉矩的。過大的rp會導致質量和成本增加,而且還會增大電機軸向長度。
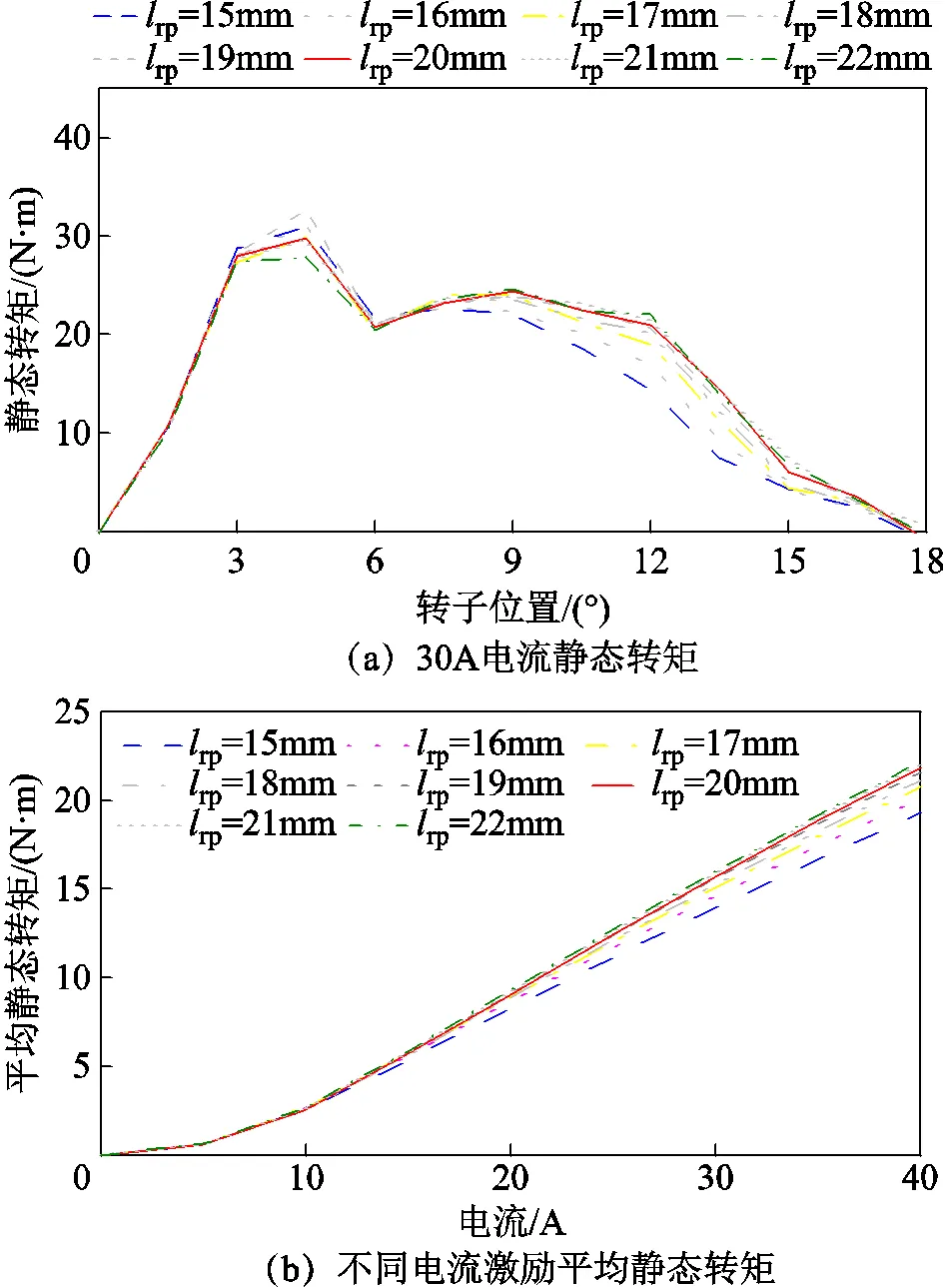
圖11 不同轉子極寬lrp對電機靜態轉矩的影響
對于不同的轉子極槽寬ro,靜態轉矩隨轉子位置的變化如圖12所示。由圖12a可以看出,當施加30A電流時,不同的轉子極槽寬ro對轉矩波形的影響較小;圖12b的平均靜態轉矩隨電流變化結果證明轉子極槽寬ro從10mm增加到15mm時,靜態轉矩變化幅度同樣較小。
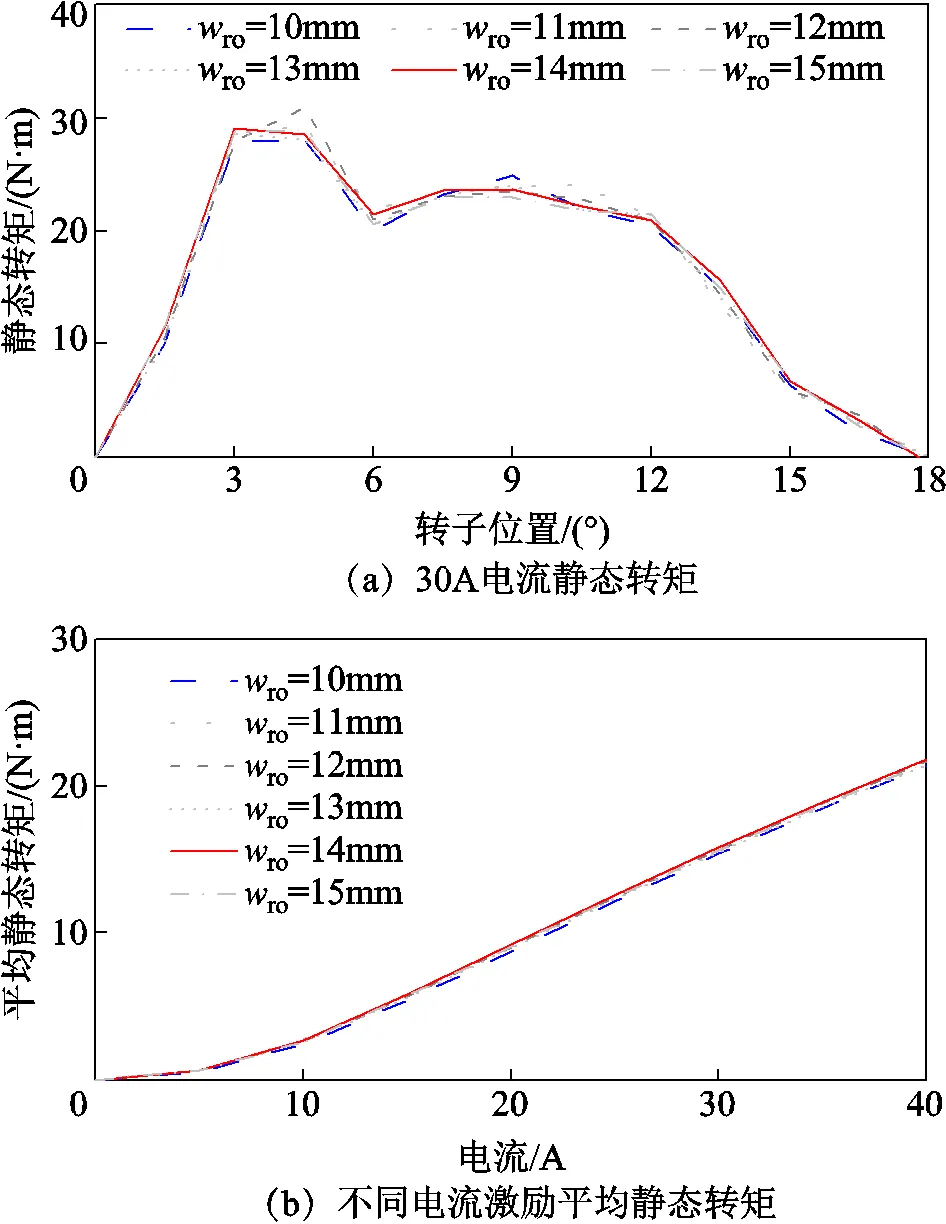
圖12 不同轉子槽寬wro對電機靜態轉矩的影響
2.3 關鍵尺寸參數優化
通過分析對上述6個結構參數的單一參數掃描結果,發現除轉子極槽寬ro對電機轉矩性能影響不顯著外,其余5個參數均有一定影響。同時由于定子軛高sy的變化趨勢是單調的,綜合考慮轉矩輸出能力和電機質量,定子軛高sy設定為12mm。因此最終選取了定子槽寬so、定轉子極靴槽寬sro、轉子極靴長rs和轉子極長rp四個參數,通過多目標優化來改善電機轉矩輸出性能。
對于傳統徑向磁通開關磁阻電機,在設計時,一般將定轉子極寬(極弧角度/系數)作為優化轉矩特性的重要指標[28-29]。對于分塊轉子SRM,有學者通過優化轉子形狀來改善電機轉矩波形,文獻[29]提出了一種通過改變轉子塊形狀來優化電機靜態轉矩的方法,借助有限元仿真改善了電機靜態電感曲線,顯著降低了電機轉矩脈動。
平均靜態轉矩和轉矩平滑系數是衡量電機靜態轉矩輸出能力的重要指標。考慮到所提WNS-AFSRM結構是作為電動汽車驅動電機應用,需要同時滿足高平均轉矩和低轉矩脈動的要求。因此以平均靜態轉矩最大、轉矩平滑系數最大作為優化目標;定子槽寬so、定轉子極靴槽寬sro、轉子極靴長rs和轉子極長rp四個參數為設計變量,進行優化設計。
電機轉矩平滑系數可由式(11)得到。
電機在額定條件下的輸出轉矩和轉矩脈動是電機的關鍵性能指標,目標函數為

田口實驗法能夠在一次實驗中分配多個控制因子和分析目標,使各個控制因子在分析過程中具有相同的權重。并且實驗中所建立的田口正交表能夠使試驗以最少的次數確定各個控制因子的最優組合,可以有效減少實驗次數,節省優化時間,近年來已經被廣泛應用在電機優化設計中[30-31]。表1列出了4個變量的設計取值,每個參數考慮了變量極限,在適當的范圍內選取了4個水平值。本文選擇了正交表L16(44),與傳統實驗設計方法的44=256次仿真相比,使用帶有L16(44)的田口正交表只需執行16次仿真,大大節約了優化時間。
表1 設計變量取值

Tab.1 Values of the design variables
根據優化函數(12)和有限元求解器與田口算法相結合的結果,結果顯示當取A2B3C4D1,即so、rso、rp、rs分別為16mm、5.5mm、20mm和2mm時,目標函數結果最大,轉矩效果最好。初始參數組合與優化參數組合下的電機靜態與合成轉矩波形對比如圖13所示。
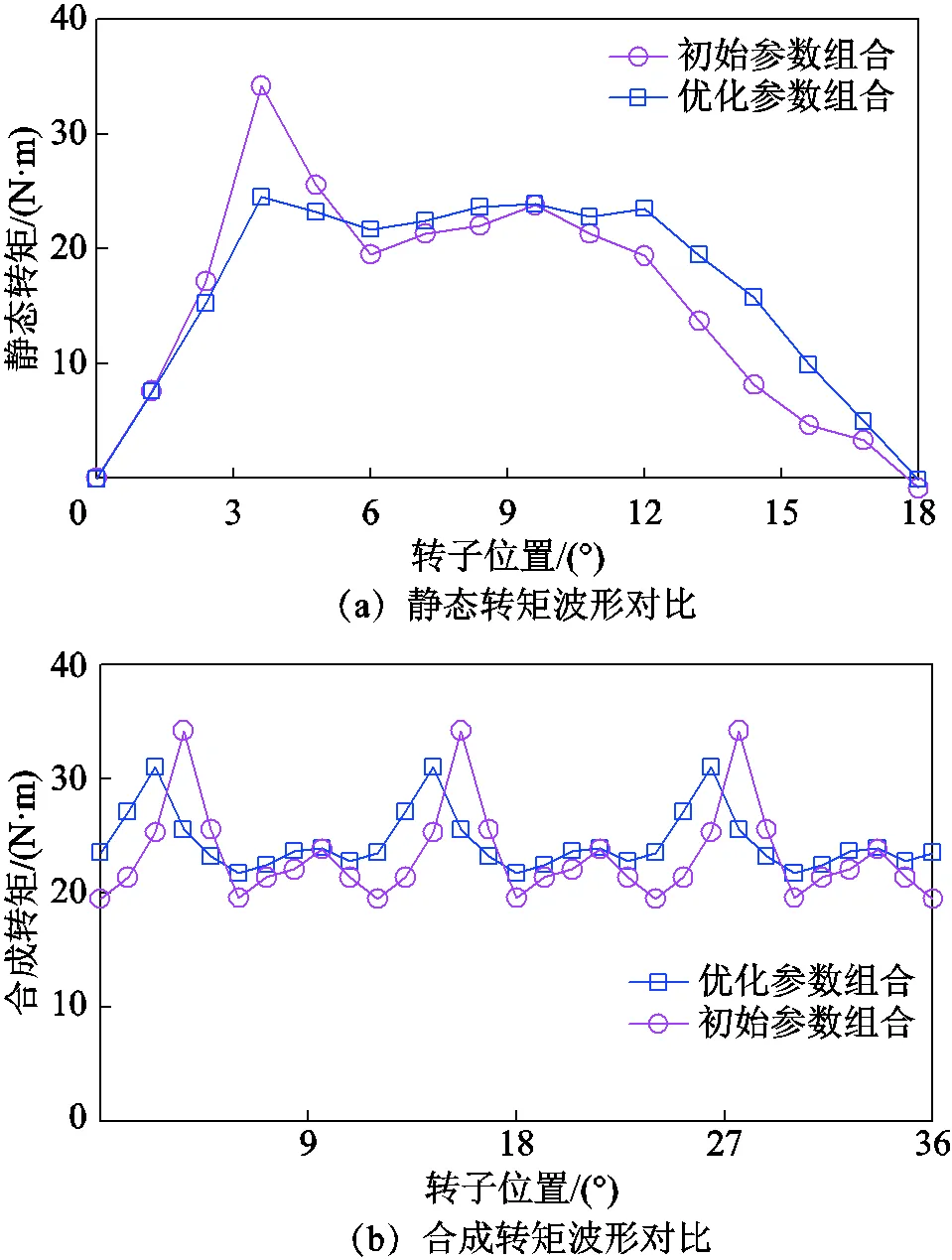
圖13 優化前后轉矩波形對比
圖13給出了初始參數組合和優化后參數組合的轉矩對比結果。其中圖13a為靜態轉矩波形,可以發現優化后方案的靜態轉矩波形更接近于“平頂波”;圖13b給出了電機在每相導通寬度為14.4°下的合成轉矩波形,能夠發現經過對轉子塊形狀進行優化,合成峰值轉矩由34.21N×m降至31.01N×m,合成波谷轉矩由19.46N×m增至21.71N×m。轉矩脈動由優化前的63.1%降低到37.9%,降低了39.9%;平均轉矩從23.40N×m略微增加到24.48N×m,增加了4.6%,驗證了本文所用優化方法的效果。經過本節的優化設計,所提NWS-AFSRM的最終尺寸參數見表2給出。
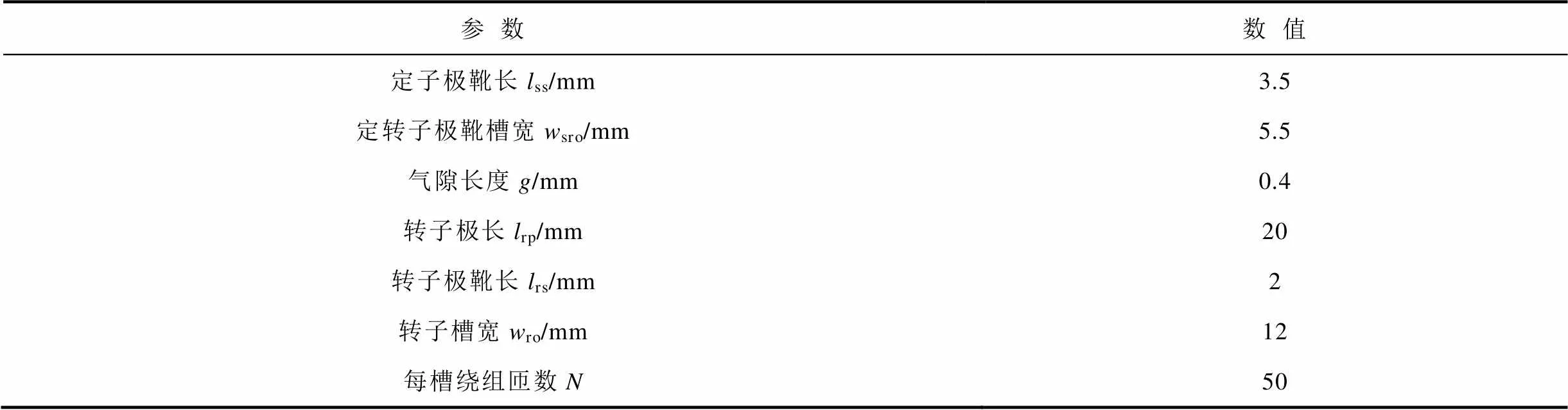
表2 新型WNS-AFSRM樣機參數
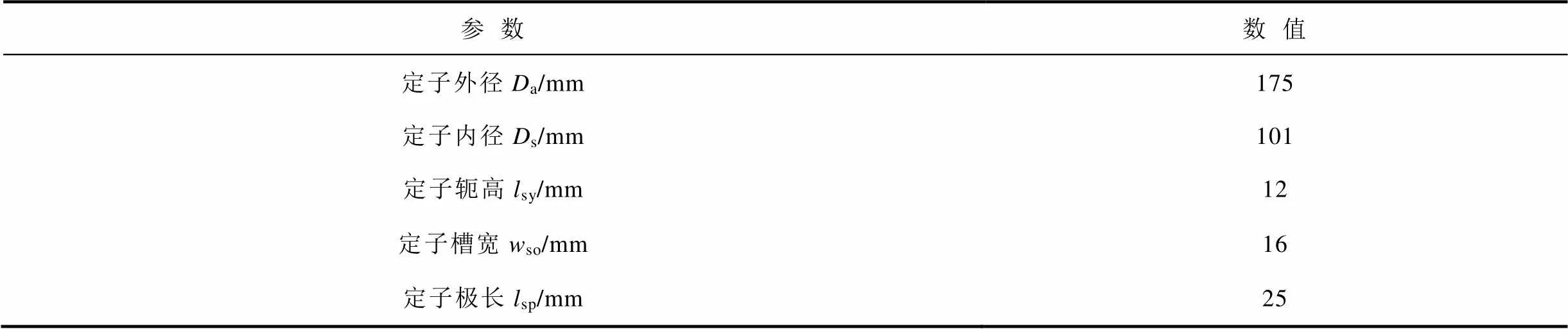
Tab.2 The parameters of the WNS-AFSRM prototype
(續)
3 電機動靜態性能分析與對比
3.1 靜態性能分析
由表2給出的電機最終尺寸參數,在Altair Flux軟件中建立了電機的三維有限元模型,利用有限元方法分析了電機性能。圖14給出了NWS-AFSRM有限元模型和剖分結果,其中氣隙部分剖分得更加精確。
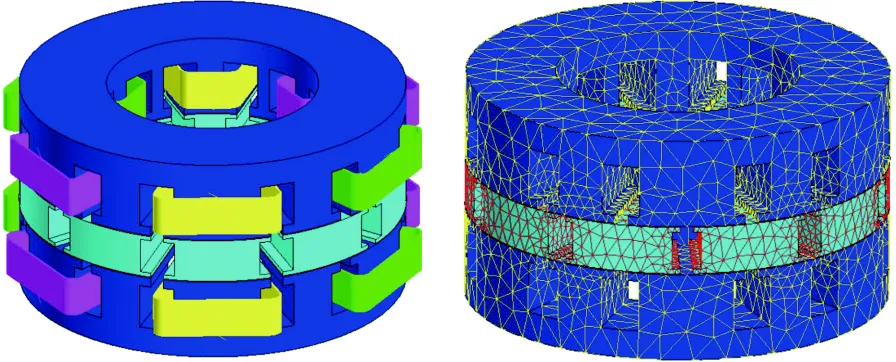
圖14 WNS-AFSRM有限元模型及剖分結果
圖15給出了電機在完全對齊與完全不對齊位置的磁通密度分布云圖。由圖15a可以看出,在完全不對齊位置,轉子塊鐵心的磁通密度很小,只在轉子極靴間處出現了磁飽和,磁通密度越往轉子塊中心處越小,證明出現了磁通抵消,同時定轉子極靴起到了良好的導磁作用;圖15b給出了在完全對齊位置電機的磁通密度云圖,可以看出,磁通密度均勻地分布在定子軛部、定子寬窄極和轉子塊中,左右定子的磁通密度分布幾乎相同,左右定子通過共享轉子來實現短磁通路徑,一定程度上證明了雙定子WNS-AFSRM結構的有效性。
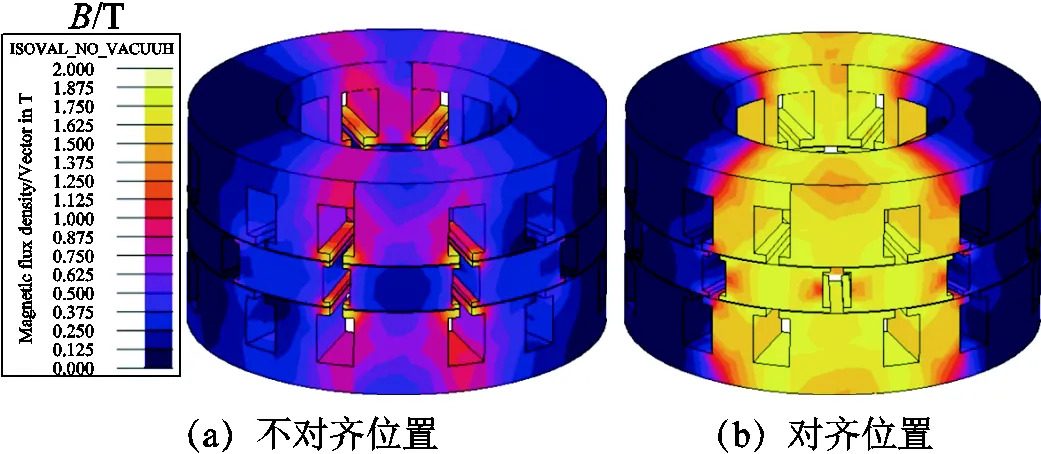
圖15 電機特殊位置的磁通密度分布云圖
圖16為電機在不同電流激勵下的靜態轉矩波形,可以看出電機在30A處的轉矩波形近似于“平頂波”,證明了所設計電機具有良好的靜態轉矩波形。圖17、圖18分別給出了電機的磁鏈和電感特性。
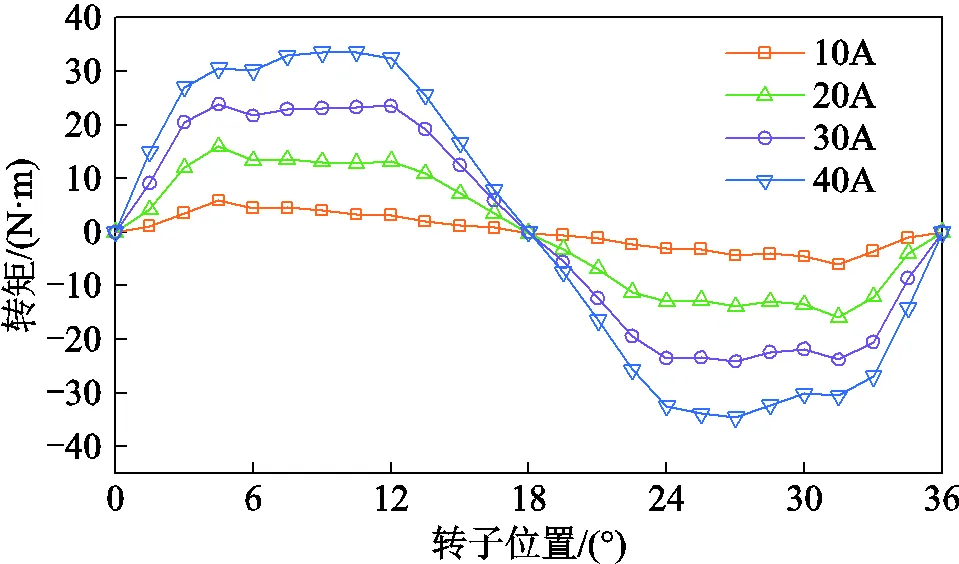
圖16 電機靜態轉矩波形

圖17 電機磁鏈特性

圖18 電機電感波形
3.2 動態性能分析
為了驗證所提新型WNS-AFSRM的動態性能,在Matlab/Simulink中搭建了新型WNS-AFSRM的仿真模型,選用三相不對稱半橋功率變換器作為電機繞組功率變換電路。
圖19給出了電機在斬波控制(CCC)方式下的相繞組電流和轉矩曲線。電機轉速為600r/min,設置開通角和關斷角分別為-0.5°和14.4°,繞組斬波限為25A。由圖19可知,電機的平均轉矩為20.0N·m,轉矩脈動僅為26.56%。
圖19 CCC控制策略下相電流和轉矩波形
圖20給出了電機在角度位置控制(APC)模式下的相繞組電流和轉矩曲線。電機轉速為1 000r/min,設置開通角和關斷角分別為-2.4°和12°。由圖20可知,電機的平均轉矩為12N·m,轉矩脈動為97.35%。

圖19和圖20的電機動態性能仿真結果證明了所提新型WNS-AFSRM達到了設計目標,且得益于在額定電流附近接近“平頂波”的靜態轉矩波形,電機在的額定工作點很好地抑制了轉矩脈動。
3.3 性能比較
為了驗證所提雙定子NWS-AFSRM的優點,本小節進行了性能比較。首先與文獻[18]中所提單定子NWS-AFSRM對比了轉子所受軸向磁拉力,然后就轉矩密度與文獻[23]所提傳統徑向磁通NWS-SRM做了對比。
首先,建立了單定子NWS-AFSRM的有限元模型,定子尺寸和所提雙定子NWS-AFSRM一致,僅微調了轉子塊形狀和部分幾何參數[18]。圖21給出了單定子NWS-AFSRM的有限元模型。

圖21 單定子WNS-AFSRM有限元模型
圖22給出了在一個轉子極距內,施加30A電流激勵時,雙定子與單定子NWS-AFSRM的轉子軸向電磁力對比圖。由圖22可知,單定子WNS-AFSRM結構在轉子部分產生了顯著的軸向電磁力,轉子處于不對稱位置時的軸向磁拉力最大,達到了1 689.8N,即使在對齊位置處,轉子軸向磁拉力也有366.6N。而雙定子WNS-AFSRM結構在轉子部分則幾乎不產生軸向電磁力。可見雙定子WNS-AFSRM結構能夠有效平衡電機轉子在軸向上的電磁拉力。

圖22 兩種WNS-AFSRM結構轉子軸向磁拉力對比
然后,利用有限元軟件建立了傳統徑向磁通12/10極NWS-SRM模型,保持定子外徑為175mm,鐵心長度為94.8mm,氣隙長度為0.4mm。圖23給出了傳統徑向磁通NWS-SRM的有限元模型。

圖23 徑向磁通12/10極NWS-SRM模型
圖24給出了兩臺NWS-SRM樣機的磁鏈對比結果。表3詳細比較了三相12/10極軸向與徑向NWS-SRM樣機的性能。

圖24 兩臺WNS-SRM樣機磁鏈對比
由圖24可知,兩臺電機的對齊位置電感幾乎相等,但是NWS-AFSRM具有更低的不對齊電感,驗證了NWS-AFSRM在不對齊位置產生了磁通抵消效果,獲得了較大的最大最小電感比。此外,由表3可知,NWS-AFSRM的銅重略大于NWS-SRM,但在鐵心質量、總質量和單位質量平均轉矩上更具優勢,可見,NWS-AFSRM的轉矩密度更大,驗證了所提NWS-AFSRM結構提升了電機的轉矩密度。
表3 兩臺WNS-SRM樣機性能對比×
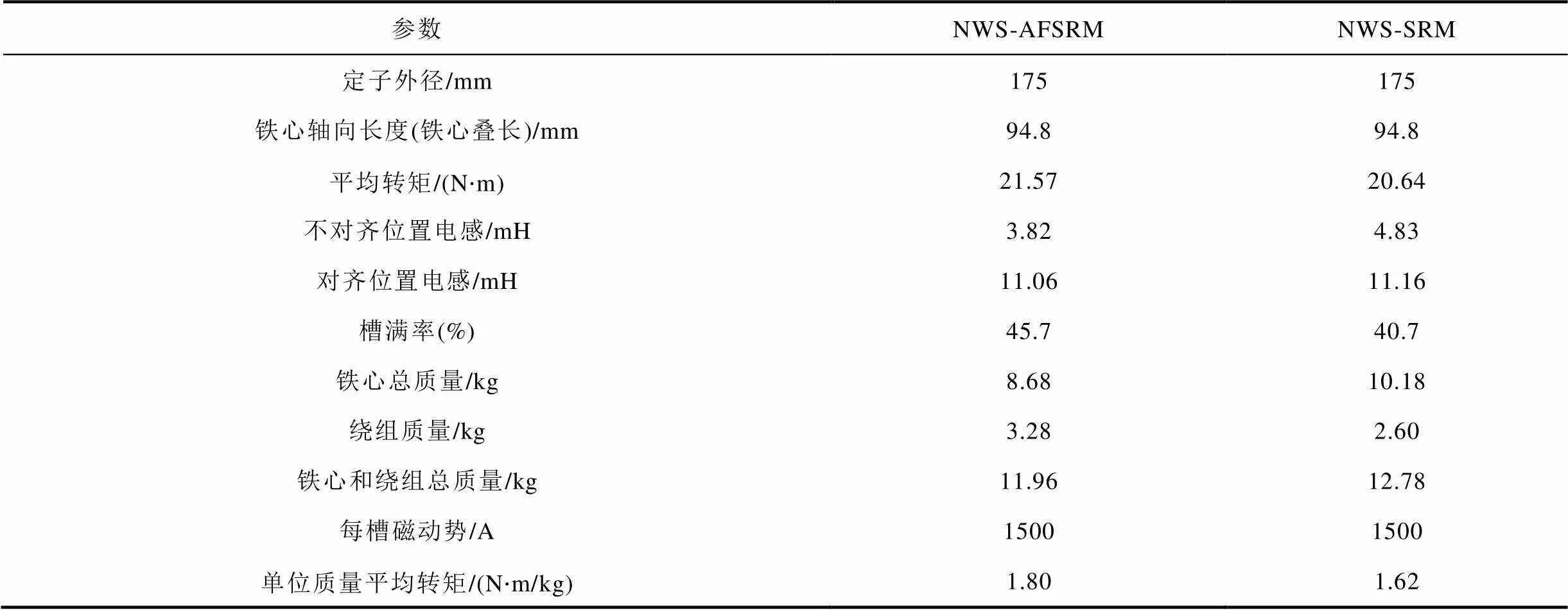
Tab.3 Performance comparison of two kinds of WNS-SRM
4 實驗驗證
為了驗證所提新型WNS-AFSRM結構的有效性和之前的仿真結果,根據第2節中獲得的電機最終尺寸參數,加工制造了一臺樣機,并搭建了相應的測試平臺。圖25給出了樣機定轉子、控制臺和實驗臺的照片。WNS-AFSRM實驗平臺由樣機、轉矩轉速傳感器和磁粉制動器組成。SRM控制系統主要包括位置檢測電路、控制器DSP28335、驅動電路、A-D轉換電路、電流傳感器、電壓傳感器和電源。

圖25 新型WNS-AFSRM樣機及測試平臺
首先測量了新型WNS-AFSRM的單相靜態磁鏈特性。以A相繞組為例,先將電機轉子通過磁粉制動器固定在不同的位置角,然后對A相繞組施加電壓,當繞組電流達到40A時,關斷開關管。得到了對齊與不對齊位置下的電壓電流波形,如圖26所示。根據SRM靜態磁鏈計算公式,新型WNS-AFSRM的磁化曲線如圖27所示。
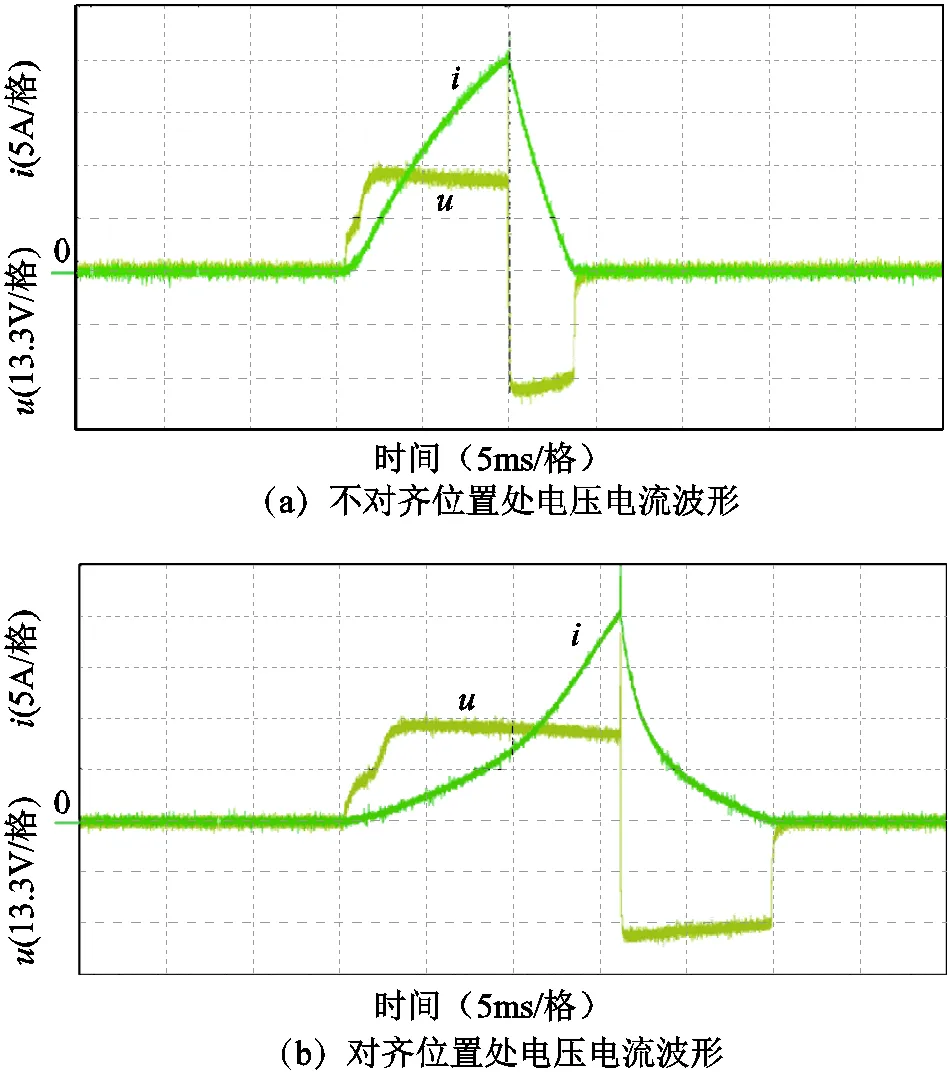
圖26 磁鏈測量實驗中不同轉子位置處電壓電流波形

圖27 仿真與實驗磁鏈波形對比
由圖27可以發現在不對齊位置的實測磁鏈結果與有限元仿真結果有較好的吻合度,在對齊位置的結果則有一定的誤差,這可能是由于機械加工制造問題導致的,但誤差仍然在可接受的范圍內。
為了驗證第3節所述的動態仿真結果,還對所提出的NWS-AFSRM進行了動態性能實驗,電機在600 r/min的CCC模式和1 000 r/min的APC控制策略下實測的電流電壓波形如圖28所示。其中通道1為繞組電壓波形,通道2、3、4則分別為電機三相繞組電流波形。CCC模式下給定斬波電流為25A。可見,圖28所示的動態實驗結果與圖19和圖20中的仿真結果表現出了良好的一致性,驗證了上述仿真結果的有效性。
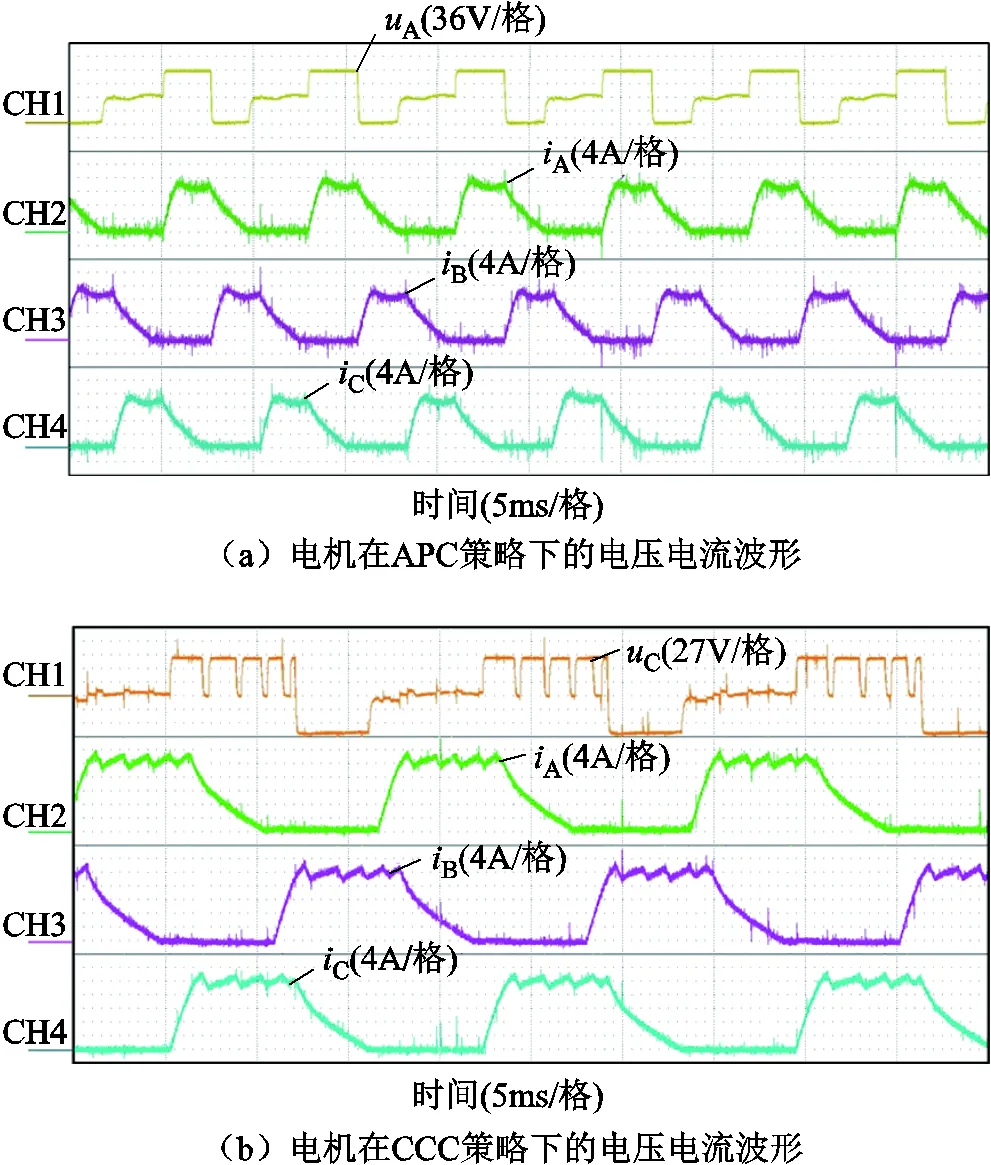
圖28 電機動態電壓電流波形
5 結論
本文借鑒了寬窄定子極SRM結構和雙定子軸向磁通SRM結構的優點,提出了一種具有寬窄定子極結構的新型雙定子軸向磁通開關磁阻電機。總結如下:
1)左右定子通過共用一個轉子塊保持了短磁通路徑,磁通在不對齊位置相互抵消,獲得了可觀的最大最小電感比。
2)采用單一變量法分析了關鍵尺寸參數變化對電機額定輸出轉矩性能的影響,并且利用田口算法進行了多目標優化,使NWS-AFSRM的轉矩脈動降低了39.9%,平均轉矩提升了4.6%。
3)采用三維有限元方法將所提雙定子NWS-AFSRM結構與單定子NWS-AFSRM進行了性能對比,結果表明并行式雙定子NWS-AFSRM結構能夠有效減小轉子所受軸向磁拉力,提高了電機的可靠性。
最后,結合樣機實驗結果,進一步驗證了所提結構的有效性和有限元分析的準確性。同時,需要指出的是,所提新型結構同樣存在不足之處:一是槽內空間相對較小,不易提高電機的磁動勢;二是所提方案對加工和裝配工藝提出了更高的要求,轉子盤兩側氣隙的安裝精確度直接關系著電機性能的發揮。
[1] 閆文舉, 陳昊, 馬小平, 等. 不同轉子極數下磁場解耦型雙定子開關磁阻電機的研究[J]. 電工技術學報, 2021, 36(14): 2945-2956. Yan Wenju, Chen Hao, Ma Xiaoping, et al. Development and investigation on magnetic field decoupling double stator switched reluctance machine with different rotor pole numbers[J]. Transactions of China Electrotechnical Society, 2021, 36(14): 2945-2956.
[2] Ding Wen, Bian He, Song Kaidi, et al. Enhancement of a 12/4 hybrid-excitation switched reluctance machine with both segmented-stator and-rotor[J]. IEEE Transactions on Industrial Electronics, 2021, 68(10): 9229-9241.
[3] 閆文舉, 陳昊, 劉永強, 等. 一種用于電動汽車磁場解耦型雙定子開關磁阻電機的新型功率變換器[J]. 電工技術學報, 2021, 36(24): 5081-5091. Yan Wenju, Chen Hao, Liu Yongqiang, et al. A novel power converter on magnetic field decoupling double stator switched reluctance machine for electric vehicles[J]. Transactions of China Electrotechnical Society, 2021, 36(24): 5081-5091.
[4] 許愛德, 任萍, 陳加貴, 等. 基于電感特殊位置點的開關磁阻電機轉子位置檢測及誤差補償[J]. 電工技術學報, 2020, 35(8): 1613-1623. Xu Aide, Ren Ping, Chen Jiagui, et al. Rotor position detection and error compensation of switched reluctance motor based on special inductance position[J]. Transactions of China Electrotechnical Society, 2020, 35(8): 1613-1623.
[5] 卿龍, 王惠民, 葛興來. 一種高效率開關磁阻電機轉矩脈動抑制方法[J]. 電工技術學報, 2020, 35(9): 1912-1920. Qing Long, Wang Huimin, Ge Xinglai. A high efficiency torque ripple suppression method for switched reluctance motor[J]. Transactions of China Electrotechnical Society, 2020, 35(9): 1912-1920.
[6] 匡斯建, 張小平, 劉蘋, 等. 基于相電感非飽和區定位的開關磁阻電機無位置傳感器控制方法[J]. 電工技術學報, 2020, 35(20): 4296-4305. Kuang Sijian, Zhang Xiaoping, Liu Ping, et al. Sensorless control method for switched reluctance motors based on locations of phase inductance characteristic points[J]. Transactions of China Electrotechnical Society, 2020, 35(20): 4296-4305.
[7] 阮俊峰, 楊明發, 周海鴻. 基于瞬時轉矩控制的開關磁阻電動機轉矩脈動抑制研究[J]. 電氣技術, 2019, 20(4): 37-41. Ruan Junfeng, Yang Mingfa, Zhou Haihong. Torque ripple minimization for switched reluctance motor based on DITC[J]. Electrical Engineering, 2019, 20(4): 37-41.
[8] 孫玉坤, 袁野, 黃永紅, 等. 磁懸浮開關磁阻電機及其關鍵技術發展綜述[J]. 電工技術學報, 2015, 30(22): 1-8. Sun Yukun, Yuan Ye, Huang Yonghong, et al. Development of the bearingless switched reluctance motor and its key technologies[J]. Transactions of China Electrotechnical Society, 2015, 30(22): 1-8.
[9] 徐妲, 林明耀, 付興賀, 等. 混合勵磁軸向磁場磁通切換型永磁電機靜態特性[J]. 電工技術學報, 2015, 30(2): 58-63. Xu Da, Lin Mingyao, Fu Xinghe, et al. Static characteristics of novel hybrid axial field flux-switching PM machines[J]. Transactions of China Electrotechnical Society, 2015, 30(2): 58-63.
[10] 徐磊, 朱孝勇, 張超, 等. 磁極徑向組合軸向磁場永磁電機轉矩品質分析與優化設計[J]. 中國電機工程學報, 2021, 41(6): 1971-1982. Xu Lei, Zhu Xiaoyong, Zhang Chao, et al. Torque quality analysis and optimization design of axial field machine with radial combined permanent magnet poles[J]. Proceedings of the CSEE, 2021, 41(6): 1971-1982.
[11] He Mingjie, Li Weiye, Peng Jun, et al. Multi-layer quasi three-dimensional equivalent model of axial-flux permanent magnet synchronous machine[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(1): 3-12.
[12] 顏建虎, 汪盼, 費晨. 模塊化開關磁阻式橫向磁通電機設計與分析[J]. 中國電機工程學報, 2018, 38(22): 6723-6729. Yan Jianhu, Wang Pan, Fei Chen. Design and analysis of modular switch reluctance transverse flux machines[J]. Proceedings of the CSEE, 2018, 38(22): 6723-6729.
[13] Sun Wei, Li Qiang, Sun Le, et al. Study on magnetic shielding for performance improvement of axial-field dual-rotor segmented switched reluctance machine[J]. CES Transactions on Electrical Machines and Systems, 2021, 5(1): 50-61.
[14] Sun Wei, Li Qiang, Sun Le, et al. Development and investigation of novel axial-field dual-rotor segmented switched reluctance machine[J]. IEEE Transactions on Transportation Electrification, 2021, 7(2): 754-765.
[15] Arihara H, Akatsu K. Basic properties of an axial-type switched reluctance motor[J]. IEEE Transactions on Industry Applications, 2013, 49(1): 59-65.
[16] Madhavan R, Fernandes B G. Axial flux segmented SRM with a higher number of rotor segments for electric vehicles[J]. IEEE Transactions on Energy Conversion, 2013, 28(1): 203-213.
[17] Madhavan R, Fernandes B G. Performance improve-ment in the axial flux-segmented rotor-switched reluctance motor[J]. IEEE Transactions on Energy Conversion, 2014, 29(3): 641-651.
[18] Wang Bo, Lee D H, Ahn J W. Characteristic analysis of a novel segmental rotor axial field switched reluctance motor with single teeth winding[C]//2014 IEEE International Conference on Industrial Technology, Busan, Korea (South), 2014: 175-180.
[19] 馬霽旻, 王杜, 曲榮海, 等. 基于有取向硅鋼的軸向磁通開關磁阻電機準三維解析分析與設計[J]. 電工技術學報, 2018, 33(17): 4069-4077. Ma Jimin, Wang Du, Qu Ronghai, et al. Quasi-three-dimensional analysis and design of an axial flux switched reluctance motor based on grain oriented silicon steel[J]. Transactions of China Electrotechnical Society, 2018, 33(17): 4069-4077.
[20] 馬霽旻. 基于有取向硅鋼的軸向磁通開關磁阻電機分析和設計[D]. 武漢: 華中科技大學, 2017.
[21] Daldaban F, Ustkoyuncu N. New disc type switched reluctance motor for high torque density[J]. Energy Conversion and Management, 2007, 48(8): 2424-2431.
[22] Torkaman H, Ghaheri A, Keyhani A. Axial flux switched reluctance machines: a comprehensive review of design and topologies[J]. IET Electric Power Applications, 2019, 13(3): 310-321.
[23] Mecrow B C, El-Kharashi E A, Finch J W, et al. Segmental rotor switched reluctance motors with single-tooth windings[J]. IEE Proceedings - Electric Power Applications, 2003, 150(5): 591.
[24] Xu Zhenyao, Lee D H, Ahn J W. Design and operation characteristics of a novel switched reluctance motor with a segmental rotor[J]. IEEE Transactions on Industry Applications, 2016, 52(3): 2564-2572.
[25] Sun Xiaodong, Diao Kaikai, Lei Gang, et al. Study on segmented-rotor switched reluctance motors with different rotor pole numbers for BSG system of hybrid electric vehicles[J]. IEEE Transactions on Vehicular Technology, 2019, 68(6): 5537-5547.
[26] Diao Kaikai, Sun Xiaodong, Lei Gang, et al. Multimode optimization of switched reluctance machines in hybrid electric vehicles[J]. IEEE Transactions on Energy Conversion, 2021, 36(3): 2217-2226.
[27] Cosoroaba E, Bostanci E, Li Yinan, et al. Comparison of winding configurations in double-stator switched reluctance machines[J]. IET Electric Power Applications, 2017, 11(8): 1407-1415.
[28] Sun Qingguo, Wu Jianhua, Gan Chun, et al. DSSRM design with multiple pole arcs optimization for high torque and low torque ripple applications[J]. IEEE Access, 2018, 6: 27166-27175.
[29] Wang Wei, Luo Mengying, Cosoroaba E, et al. Rotor shape investigation and optimization of double stator switched reluctance machine[J]. IEEE Transactions on Magnetics, 2015, 51(3): 1-4.
[30] Chen Hao, Yan Wenju, Gu J J, et al. Multiobjective optimization design of a switched reluctance motor for low-speed electric vehicles with a taguchi–CSO algorithm[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(4): 1762-1774.
[31] Yan Wenju, Chen Hao, Liao Shuo, et al. Design of a low-ripple double-modular-stator switched reluctance machine for electric vehicle applications[J]. IEEE Transactions on Transportation Electrification, 2021, 7(3): 1349-1358.
Design and Characteristic Analysis of a Wide-Narrow Stator Poles Axial Flux Switched Reluctance Machine
Yu Fengyuan1,2Chen Hao1,2Yan Wenju1,2Liu Yongqiang1,2Dong Linjie1,2
(1. School of Electrical Engineering China University of Mining and Technology Xuzhou 221116 China 2. Xuzhou Key Laboratory of New Energy Electric Vehicle Technology and Equipment Xuzhou 221116 China)
In recent years, switched reluctance motors (SRM) have been applied in electric vehicles and aerospace due to their simple and robust structure, good fault tolerance, large starting torque, and wide speed range. However, the low torque density and high torque ripple have limited their large-scale application. With the improvement of industrial manufacturing level, the axial flux motor (AFM) has gradually attracted attention due to its shorter axial length and higher power density. In this paper, a novel wide-narrow stator-pole axial flux SRM (WNS-AFSRM) is proposed and investigated.
Firstly, the topology and operating principle of the WNS-AFSRM are introduced. The motor has a parallel double-stator structure in which the left and right stator discs maintain a short magnetic path by sharing one single rotor segment. The stator teeth are staggered between the wide and narrow poles, with concentrated windings wound on the wide stator poles and no windings on the narrow stator poles. Hence, better magnetic, thermal and mechanical isolation is achieved, and the reliability of the WNS-AFSRM is ensured. Secondly, the design flow chart is presented, the power equation is also given, and the initial structural parameters of the WNS-AFSRM are determined. The three-dimensional finite element method is employed to analyze the influence of six key dimensional parameters on the torque output capability. Then, four parameters with a considerable impact are selected, and the Taguchi algorithm is carried out to optimize these four key dimensional parameters to improve motor performance. Comparing the torque waveforms before and after the optimization shows that the maximum synthetic torque decreases from 34.21N·m to 31.01N·m, while the minimum synthetic torque increases from 19.46N·m to 21.71N·m. Thus, the torque ripple has been reduced by 39.9% from 63.1% to 37.9%. Besides, the average torque increases from 23.40N·m to 24.48N·m with an increment of 4.6%.
Thirdly, the static and dynamic performance of the WNS-AFSRM is simulated, and the performance is compared with two other motors. The radial electromagnetic force is compared with a single-stator WNS-AFSRM under the same outer diameter.It is demonstrated that the proposed double-stator WNS-AFSRM structure could effectively reduce the unbalanced axial electromagnetic force of the rotor. Moreover, a comprehensive performance comparison is conducted with a radial flux SRM with the same wide-and-narrow stator-poles structure under the same outer diameter and axial length. It can be found that the inductance at the aligned position is almost equal for both motors, but the NWS-AFSRM has a lower unaligned inductance. In addition, the core mass, total mass and average torque per unit mass of the NWS-AFSRM are more significant than that of the NWS-SRM, verifying the increased torque density of the proposed NWS-AFSRM. Finally, the final dimensional parameters are given, and a 1.25kW prototype is manufactured. The measured static flux linkage and dynamic current waveforms verify the correctness of the finite element and simulation results.
The following conclusions can be drawn from the simulation and experimental results: (1) The left and right stators maintain short magnetic path by sharing a common rotor segment, and the magnetic flux cancels each other at the unaligned position to obtain an appreciable maximum-minimum inductance ratio. (2) The influence of variations in vital dimensional parameters on the rated output torque performance is analyzed using the single variable method, and the multi-objective Taguchi optimization algorithm results in a 39.9% reduction in torque ripple and a 4.6% increase in average torque for the NWS-AFSRM. (3) The proposed double-stator NWS-AFSRM structure is compared with the single-stator NWS-AFSRM using the three-dimensional finite element method. The results show that the proposed structure could effectively reduce the unbalanced axial electromagnetic force and improve the reliability of the motor.
Axial flux switched reluctance motor, finite element method, multiobjective optimization, electromagnetic performance
國家自然科學基金國際(地區)合作與交流項目-2019年度國家自然科學基金委員會與埃及科學研究技術院合作研究項目(51961145401)和徐州市推動科技創新專項資金項目-創新能力建設計劃(KC21315)資助。
2021-10-21
2022-01-17
10.19595/j.cnki.1000-6753.tces.211668
TM352
于豐源 男,1993年生,博士研究生,研究方向為開關磁阻電機系統及其控制。E-mail:cumt_yfy@163.com
陳 昊 男,1969年生,教授,博士生導師,研究方向為新型電機系統及其控制。E-mail:hchen@cumt.edu.cn(通信作者)
(編輯 郭麗軍)
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50