基于無人機傾斜攝影的道路交通事故現(xiàn)場三維建模
2023-03-20 04:44:34潘九寶
無線互聯(lián)科技 2023年1期
關(guān)鍵詞:模型
潘九寶
(江蘇省基礎(chǔ)地理信息中心,江蘇 南京 210013)
0 引言
近年來,隨著我國經(jīng)濟快速發(fā)展,機動車保有量迅猛增長。與此同時,交通出行的個性化需求以及網(wǎng)絡(luò)服務(wù)平臺的快速興起和繁榮,網(wǎng)約車、外賣及快遞車輛等交通工具大量參與道路交通通行,道路交通事故已呈高發(fā)態(tài)勢。道路交通事故現(xiàn)場勘測主要內(nèi)容是拍攝事故現(xiàn)場照片、完成事故現(xiàn)場定位測量及各事故元素的測量、繪制現(xiàn)場圖。根據(jù)事故現(xiàn)場勘測的數(shù)據(jù),反推事故車輛的碰撞過程,分析事故原因,為事故責(zé)任認定提供科學(xué)參考依據(jù)。
交通事故極其容易引起交通擁堵,為了減少對交通事故現(xiàn)場的干擾,道路交通事故現(xiàn)場勘測過程必須在較短時間內(nèi)完成,且能夠全面地采集各類信息。面對上述要求,傳統(tǒng)的現(xiàn)場勘測人工作業(yè)、近景攝影測量方法仍然是在地面進行,無法快速有效地實現(xiàn)全局影像的獲取[1-2],不能滿足當(dāng)前道路交通事故快速處理的需要。近年來,隨著無人機技術(shù)的快速發(fā)展和普及程度的提升,利用消費級無人機進行傾斜攝影測量已經(jīng)逐漸成為一種重要的空間信息采集手段,廣泛用于生成4D產(chǎn)品和實景三維模型[3-5]。利用無人機航拍道路交通事故現(xiàn)場方位和概覽照片,建立了“以無人機拍攝為主、其他勘查手段為輔”的道路交通事故現(xiàn)場勘測新思路[6-7]。當(dāng)前,無人機在道路交通事故現(xiàn)場勘測中,主要是作為高空移動攝影平臺,用于拍攝事故現(xiàn)場的圖像和視頻[1]。隨著無人機傾斜攝影測量技術(shù)的不斷成熟,利用無人機拍攝傾斜影像建立道路交通事故現(xiàn)場的三維模型更具有應(yīng)用價值。本文分析了道路交通事故現(xiàn)場傾斜攝影與三維建模的技術(shù)流程,結(jié)合實例分析了道路交通事故現(xiàn)場三維模型的質(zhì)量,總結(jié)了三維模型的應(yīng)用優(yōu)勢。
1 道路交通事故現(xiàn)場傾斜攝影與三維建模
1.1 無人機傾斜攝影測量技術(shù)
與傳統(tǒng)攝影測量的垂直攝影方式不同,無人機傾斜攝影測量技術(shù)通過搭載多臺不同朝向的相機,分別從不同角度獲取目標(biāo)的全景影像,同時記錄拍攝點位的位置信息,通過后期數(shù)據(jù)處理可實現(xiàn)影像的空間定位。
用于傾斜攝影測量的無人機均配置了GNSS定位模塊,與地面自設(shè)基準(zhǔn)站或CORS基準(zhǔn)站之間進行實時動態(tài)差分定位(RTK),GNSS定位模塊可以實時提供高精度的定位數(shù)據(jù),其精度可以達到厘米級。在傾斜影像數(shù)據(jù)采集過程中,充分利用GNSS定位模塊 RTK 測量高精度定位結(jié)果,在沒有提前設(shè)置地面控制點的條件下進行數(shù)據(jù)采集,利用每次曝光瞬間獲取的定位數(shù)據(jù)作為整個三維模型統(tǒng)一的空間參考基準(zhǔn)。由于影像含有空間信息,可以在影像上直接量測地面目標(biāo)的距離、面積等屬性信息。在三維建模時可以為三維模型提供豐富的地物紋理,并降低建模的成本。
1.2 技術(shù)流程
內(nèi)外業(yè)實施技術(shù)流程如圖1所示。在無人機實施航測任務(wù)之前,需要對目標(biāo)區(qū)域進行現(xiàn)場勘查,利用配套的航攝規(guī)劃軟件確定初步的技術(shù)方案,明確航測作業(yè)空域,在飛控軟件中設(shè)置起降點、航高等作業(yè)參數(shù)。
在傾斜攝影測量內(nèi)業(yè)處理中,需要依據(jù)物方和像方之間的解析關(guān)系,由像點坐標(biāo)、影像的攝影中心和影像在地面坐標(biāo)系中的位置和姿態(tài),進一步從航拍影像上的像點確定被研究物體的位置、形狀和大小及其相互關(guān)系等信息。三維模型的生成原理是通過尋找影像的特征點,然后進行特征點匹配,營造出三維立體效果,在實際生產(chǎn)過程中,需要依靠專業(yè)軟件處理來生成三維模型,常見的處理軟件有Pix4Dmapper,ContextCapture,PhotoScan,Inpho等。
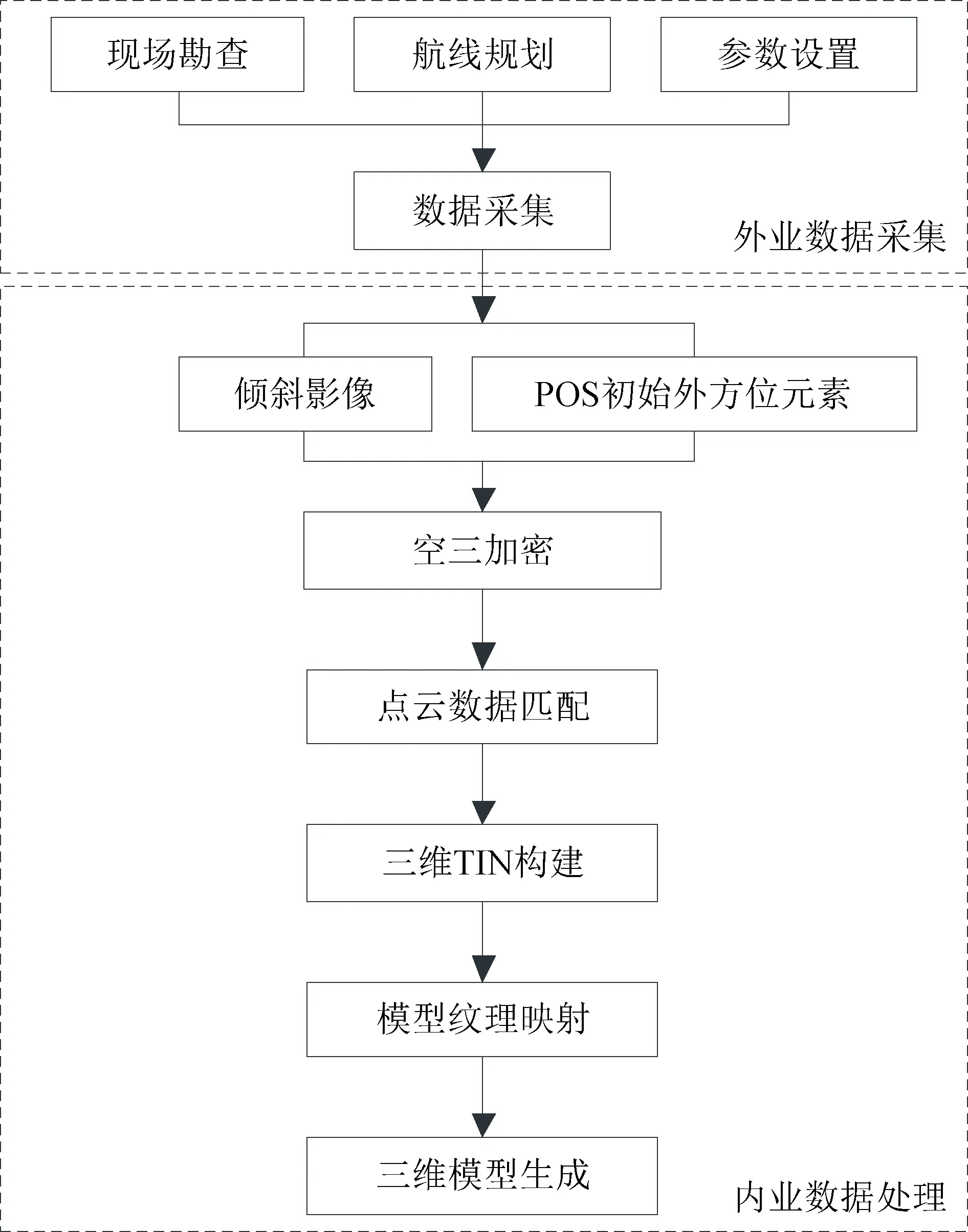
圖1 技術(shù)路線
2 試驗分析
2.1 影像獲取
以某一模擬的交通事故現(xiàn)場開展試驗,事故現(xiàn)場面積約500 m2。使用大疆精靈3四旋翼無人機進行數(shù)據(jù)采集,無人機主要性能參數(shù)如表1所示。無人機的衛(wèi)星定位模塊支持GPS/GLONASS雙系統(tǒng),通過RTK可實現(xiàn)厘米級導(dǎo)航定位,為空三解算提供高精度外方位線元素初始值。
影像獲取共實施飛行1個架次,通過以事故現(xiàn)場為中心環(huán)繞式飛行,通過云臺調(diào)整使相機鏡頭始終朝向事故現(xiàn)場車輛,獲得有效航片67張,其相對航高在4.2 m~22.5 m,各張航片的拍攝時間如圖2所示,各張航片的平面位置如圖3所示。
從圖2可以看出,相鄰航片之間的采集時間間隔較為均勻,航片拍攝總耗時為8分54秒。從圖3可以看出,航片以事故現(xiàn)場為中心呈環(huán)形分布,實現(xiàn)了對事故現(xiàn)場的多角度和多高度觀測,更加全面地記錄現(xiàn)場細節(jié)。
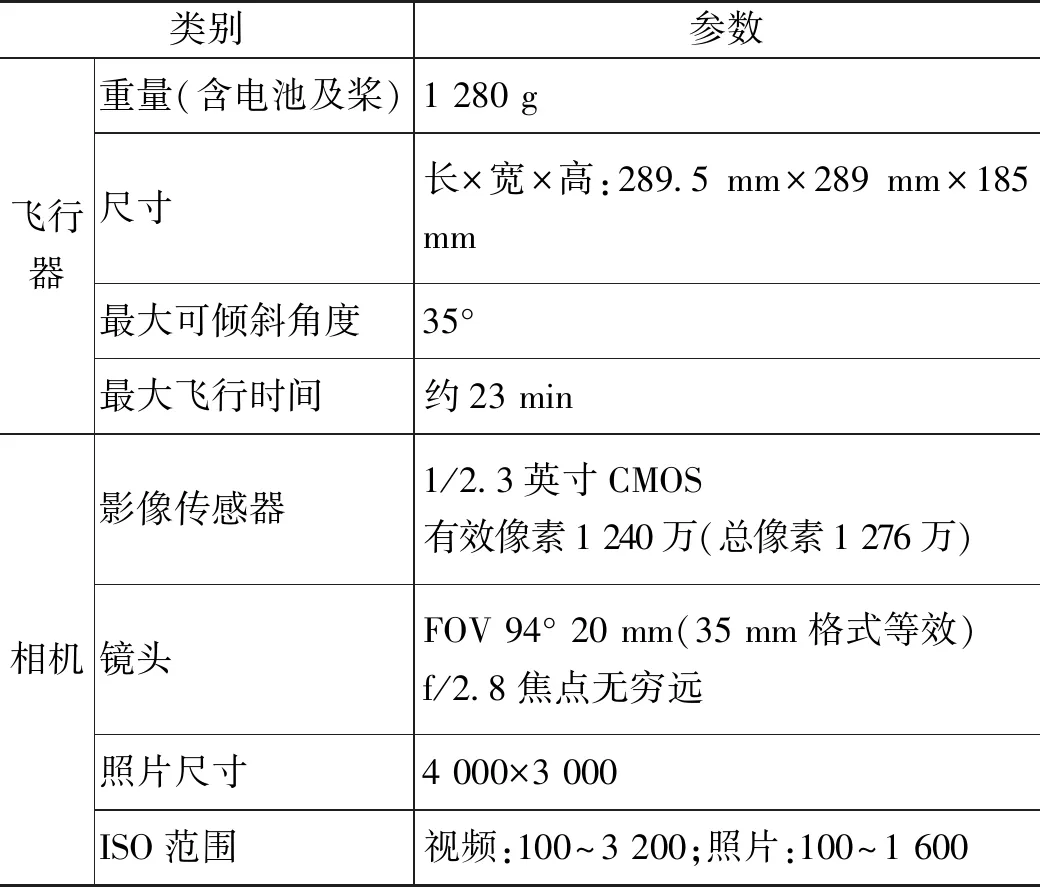
表1 無人機主要性能參數(shù)
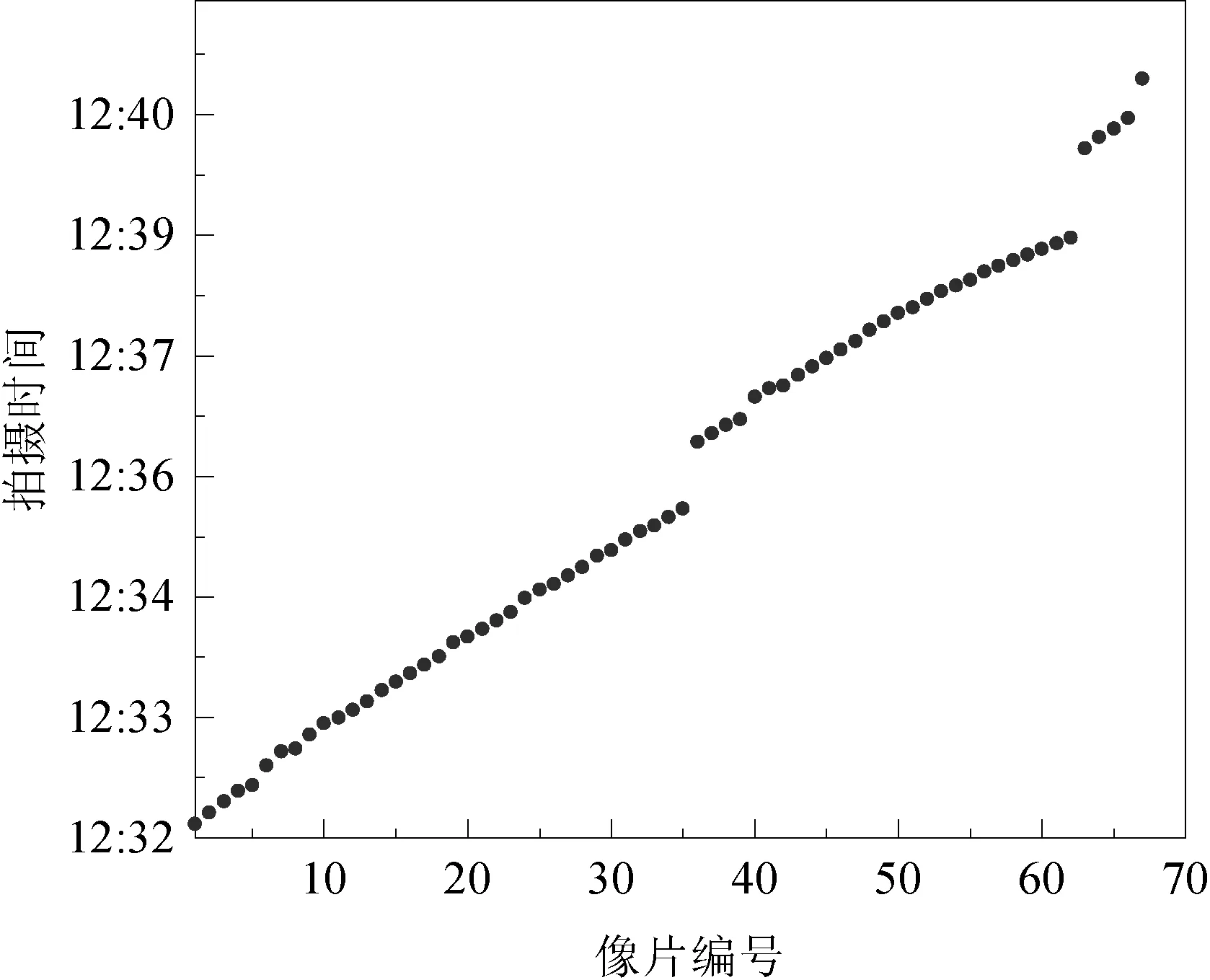
圖2 航片的拍攝時間
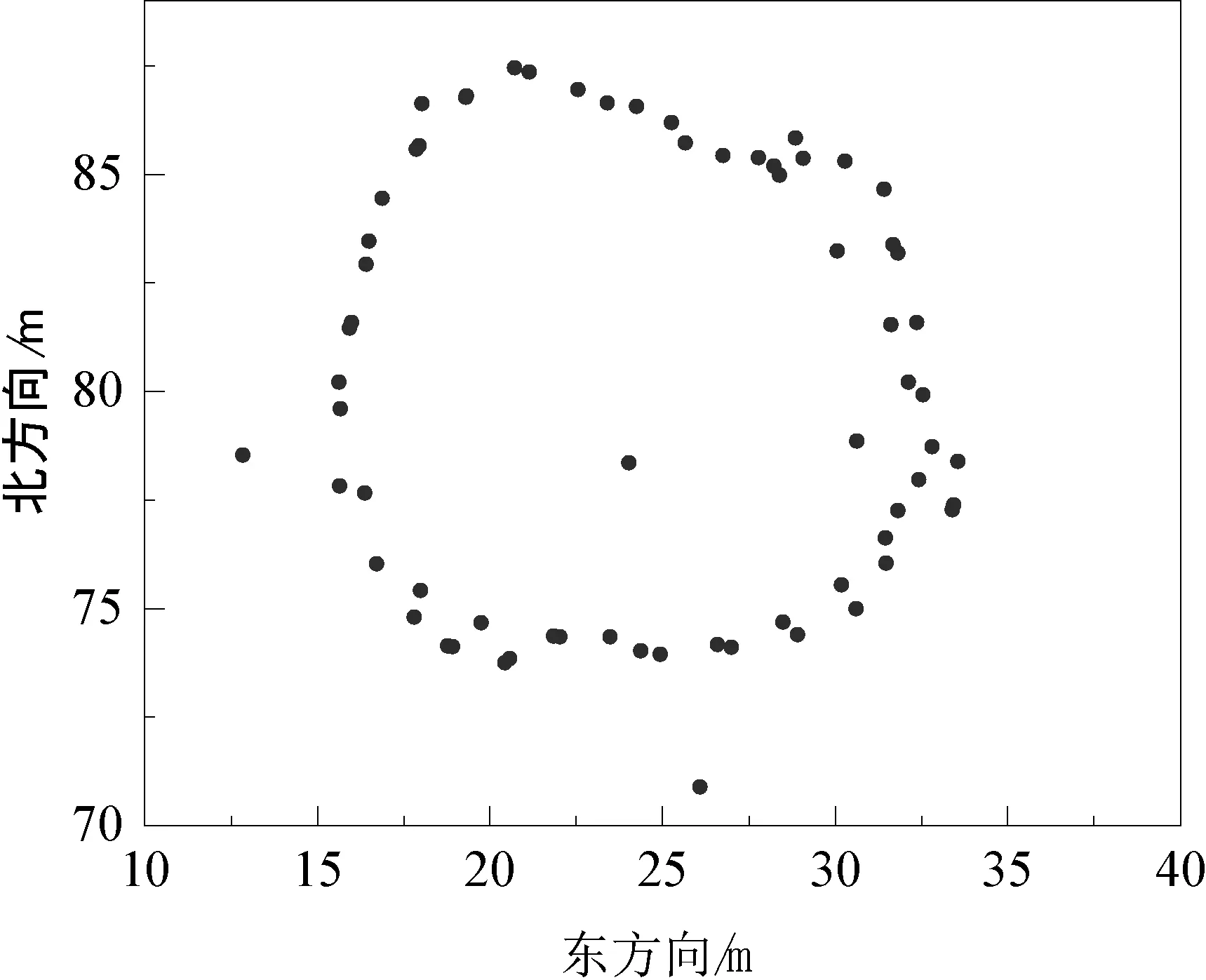
圖3 航片的平面位置
2.2 數(shù)據(jù)處理
影像數(shù)據(jù)處理選用 PIX4Dmapper軟件,整個處理過程完全自動化,無需人為干預(yù)即可獲得專業(yè)的精度。此外,該軟件無需IMU姿態(tài)信息,只需影像的GNSS定位信息。PIX4Dmapper軟件導(dǎo)入影像后,快速建立影像之間的拓撲關(guān)系,空中三角測量處理后得到原始影像的外方位元素,前方交會計算出像點對應(yīng)地面點的三維坐標(biāo),經(jīng)過特征點匹配后,得到影像匹配的點云,快速構(gòu)建不規(guī)則三角網(wǎng)(TIN),完成三維建模,并提供詳細的、定量化的自動空三、區(qū)域網(wǎng)平差精度信息。整個數(shù)據(jù)處理流程在一臺CPU i5-3470、內(nèi)存4GB的計算機上耗時15分58秒。空中三角測量處理后恢復(fù)了外方位元素的航片如圖4所示,事故現(xiàn)場三維建模的局部結(jié)果如圖5所示。

圖4 空中三角測量處理后的航片

圖5 交通事故現(xiàn)場三維建模結(jié)果
2.3 模型質(zhì)量評價
道路交通事故現(xiàn)場勘測注重現(xiàn)場目標(biāo)的形狀、大小和運動數(shù)據(jù),如車輛間距、制動和側(cè)滑痕跡、挫劃痕等信息,因而三維重建的精度主要側(cè)重于相對精度。首先,根據(jù)PIX4Dmapper軟件生成的質(zhì)量報告,以光束法區(qū)域網(wǎng)平差細節(jié)和內(nèi)部相機參數(shù)[8-9]兩個指標(biāo)進行精度評價。質(zhì)量報告顯示光束法區(qū)域網(wǎng)平差后平均重投影誤差為0.159像素,具有較高的精度。質(zhì)量報告中的內(nèi)部相機參數(shù)如表2所示,各類參數(shù)的初始值和優(yōu)化值相差較小,R1,R2,R3的數(shù)值遠小于1,表明各類參數(shù)均符合要求,平差結(jié)果是可靠的。
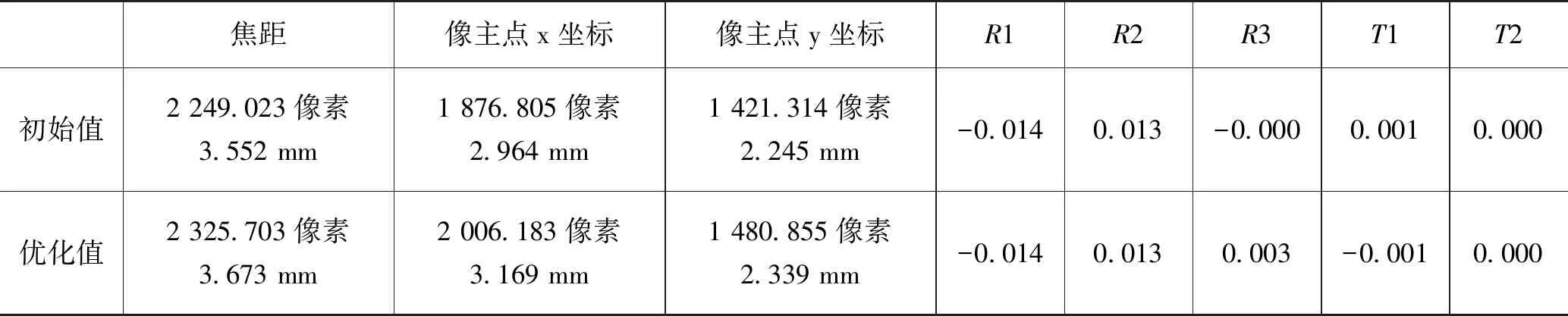
表2 內(nèi)部相機參數(shù)
為了檢驗三維模型的相對精度,將現(xiàn)場中特定目標(biāo)的長度與三維模型上量測得到的結(jié)果進行比對。本試驗中選取現(xiàn)場車輛的輪轂作為參考,各類車型的輪轂半徑是精確已知的常數(shù),利用該數(shù)值可以方便地計算三維模型上量測結(jié)果的真實偏差。以現(xiàn)場兩類車型為參考,其輪轂尺寸分別為18英寸和17英寸,對應(yīng)的輪轂半徑分別為22.86 cm和21.59 cm,在各類車型上分別在不同位置量取其輪轂半徑,各量取10次,各次量取結(jié)果的絕對誤差如圖6所示。
由圖6結(jié)果可以看出,特定目標(biāo)的長度偏差絕對值最大為1.6 cm,最小為0.3 cm,平均值為0.8 cm,表明三維模型具有較高的精度,其量測結(jié)果能夠滿足道路交通事故現(xiàn)場勘測的需求。
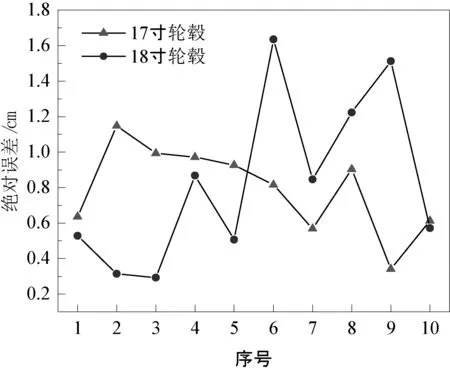
圖6 輪轂半徑量測值與實際值的比較
3 結(jié)語
本文分析了道路交通事故現(xiàn)場無人機傾斜攝影與三維建模的技術(shù)流程,結(jié)合實例分析了道路交通事故現(xiàn)場三維模型建立的效率和精度,根據(jù)模擬事故現(xiàn)場的試驗結(jié)果,可以得出以下結(jié)論:
(1)無人機傾斜攝影的外業(yè)耗時短、效率高,典型的交通事故現(xiàn)場數(shù)據(jù)采集時間少于10 min,內(nèi)業(yè)處理耗時少于20 min,如果采用高性能計算機可進一步縮短內(nèi)業(yè)處理時間。
(2)使用合適的內(nèi)業(yè)軟件能以較高的自動化處理程度完成三維建模,模型具有較高的相對精度,符合道路交通事故現(xiàn)場勘測的需求。
無人機傾斜攝影技術(shù)能夠快速采集現(xiàn)場環(huán)境三維信息,將視野從傳統(tǒng)的平面圖像擴展到立體空間,影像采集過程簡單易行,對道路交通的影響較小,后期處理自動化程度高,在道路交通事故現(xiàn)場勘測中具有較強的應(yīng)用優(yōu)勢。利用該技術(shù)建立的三維模型可以通過不同的尺度和視角進行瀏覽,豐富的側(cè)面紋理信息能夠更加逼真地展示現(xiàn)場狀況,還可以根據(jù)需要對特定要素進行量測,實現(xiàn)了對事故現(xiàn)場的數(shù)字化保存,因而無人機傾斜攝影技術(shù)建立交通事故現(xiàn)場的三維模型具有獨特的應(yīng)用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19