基于Hough變換和優化K均值聚類的反艦導彈編隊識別目標選擇方法
2023-03-21 03:08:06黃雋吳鵬飛李曉寶劉玥
兵工學報 2023年2期
黃雋, 吳鵬飛, 李曉寶, 劉玥
(海軍工程大學 兵器工程學院, 湖北 武漢 430033)
0 引言
反艦導彈的目標選擇通常有特征識別和編隊識別兩類技術。特征識別依據指定目標的單一特征或者加權綜合特征,但隨著反艦導彈自控時間增長,末端編隊態勢變化超出特征識別的能力。編隊識別是將導彈末制導雷達得到的編隊態勢,與目標指示階段實時探測或者情報數據庫的編隊態勢相匹配,排序并識別編隊預定目標的過程。實現編隊識別[1]主要有兩類技術思路,現有方法側重隊形識別,而非目標識別。
一類編隊識別方法根據隊形相關參數在量測空間結合編隊模板[2-7]或者規則[8-9]直接計算判斷。如以陣群成員位置觀測集合和先驗隊形模板的最大勢匹配子集中心為基準點描述觀測和模板隊形,通過隊形描述匹配識別觀測陣群目標隊形,該方法工程上可操作性較弱;根據隊形模板與待識別編隊各艦方位角的方位距離建立空間場景方向相似性判別函數進行隊形判別,對不同隊形區分度不高、看齊角對判斷影響過大;用隊列線數量和隊列角建立編隊線型隊形模板,給出基準目標、其他目標相對隊列方位和相似性量度的數學模型,判斷目標是否位于同一隊列線,聚類獲得隊列線數量,從而識別隊形,相似性量度要求方位角偏差必須小于探測誤差,對目標位于同一隊列線的判斷不夠嚴謹。
另一類編隊識別將目標從量測空間轉換到參數空間參數[10-13],結合編隊模板進行匹配判斷,如針對隊形形狀和群體成員分布規律建立特征模型和模板,基于模板滑動匹配識別隊型,可識別線型隊形,但聚類過程復雜,實時性較弱。現有K均值聚類數優化方法[14-15]代價函數采用D+L,D為類內差異度,L為類間差異度,L取聚類中心到全體樣本均值的距離之和,優化效果較好,但存在關鍵聚類數段區分度不明顯、對典型數據樣本聚類出現多局部最優值和聚類優化數略高于理論值問題;或采用D/L,但具有遞減特性。共性問題是未考慮檢測區間對聚類效果的影響,聚類數優化和聚類迭代過程相互獨立。
本文基于Hough變換和優化K均值聚類算法,實現對目標指示階段之后未制導階段之前隊列要素發生變化的典型編隊目標識別與選擇。
1 編隊識別目標選擇流程
基于Hough變換和優化K均值聚類的反艦導彈編隊識別目標選擇流程可以概括為目標指示階段進行目標預選和末制導階段目標確認兩個階段任務。
從艦艇雷達目標態勢下達到導彈發射階段,完成1.1節~1.3節三個步驟,預選打擊目標。從導彈發射到導彈結束自控飛行段進入末制導雷達開機搜索跟蹤階段,編隊目標發生旋轉、縮放,或進行干擾。導彈末制導雷達開機后,重復1.1~1.3節,匹配目標指示態勢,從而確認下達目標。
1.1 編隊目標Hough變換映射
獲取目標隊形成員量測空間坐標,Hough變換映射到參數空間。Hough變換檢測直線的實質是建立量測空間A={R:R=(X,Z)}點與參數空間B={r:r=(θ,ρ)}曲線的對應關系,將量測空間直線檢測問題轉化為參數空間曲線交點聚類問題。其中,X、Z為直角坐標系橫坐標和縱坐標,θ為量測空間原點到過該點的任意一條直線的垂線與X軸正向所成的夾角,正常檢測區間[12,16]取[0 rad,π rad),|ρ|為垂線長度,ρ可正可負。
對量測空間任意點R=(X,Z),可移動檢測區間的Hough變換函數為

(1)
式中:ρ表達式為量測空間任意點轉換到參數空間的基本公式,3個約束分別描述了正常檢測區間、移動檢測區間范圍、正常檢測區間到移動檢測區間的極坐標轉換公式;(θ0,ρ0)為需要移動檢測區間的Hough曲線交點極坐標;Δθ為分辨率,當存在Hough曲線交點分布在[0 rad,5·Δθ)∪[π rad-5·Δθ,π rad)時,采用移動檢測區間。
1.2 優化K均值聚類檢測隊列線

K均值聚類是將數據點到類中心的某種距離(常用歐氏距離)之平方和作為目標函數,通過迭代運算使得目標函數值最小,從而得到聚類中心的最優分類方法。假設將數據集合X劃分為k類,利用式(2)定義距離誤差平方和最小準則進行迭代聚類和類中心更新:
(2)
式中:E為目標函數;k為聚類數;ra為類Wj的任一樣本;cj為類Wj的聚類中心;nj為類Wj中數據樣本數目。
采用式(3)計算最優聚類數k*值,使得類內差異度D最小、類間差異度L最大:
(3)
式中:kmax為聚類數上限[15];?·」表示向下取整;F(D,L)為差異度代價函數。
優化K均值聚類算法流程如下:
步驟1啟動優化聚類數k迭代,k=1,2,…,kmax。
步驟2針對一定聚類數k,啟動聚類迭代,rep=1,2,…,n,從樣本集X按均勻分布規律隨機選取k個樣本作為初始聚類中心,由式(4)計算各樣本到各初始聚類中心的目標函數矩陣:
D=(dij)n×k,dij=‖ri-cj‖2,ri∈X
(4)
式中:dij表示矩陣D的第i+(j-1)×n個元素。由式(5)確定各樣本到各聚類中心最小距離平方和組成的列向量d及對應聚類號列向量id,進行初始分類,并計算各類樣本數量。
d=[minD(1,:),…,minD(i,:),…,minD(n,:)]′id=[id1,…,idi,…,idn]′
(5)
式中:min(·)表示取向量中最小的元素。然后展開聚類迭代,貫序分為多樣本更新聚類和單樣本更新聚類兩個階段。
步驟3多樣本更新聚類階段。
①根據聚類號列向量id和樣本發生增減的聚類號dc(見式(8))分批更新變化的聚類中心和變化樣本數量;然后由變化的聚類中心分批計算變化的目標函數矩陣D。
②處理變為空集的聚類。
③由式(2)計算目標函數值,判斷目標函數值是否減小。若未減小,則后撤一步,返回該迭代步的聚類中心并計算各類樣本數量,轉入單樣本更新聚類階段;若減少,則暫存聚類號列向量id和目標函數值。
④由式(5)同時確定各樣本到各聚類中心最小距離平方和組成的列向量d及對應聚類號列向量id。
⑤由式(6),比較新舊聚類號列向量id、id′是否變化,確定哪些樣本改變聚類,得移動列向量dm(聚類號變化的樣本號):
(6)
式中:[]表示沒有元素,降低列向量行數;dmi表示列向量dm的第i個元素。
如果有所改變則由式(7)比較樣本到新舊聚類中心距離平方和,確定是否減小,改變移動列向量dm:
(7)
然后用新聚類號取代樣本的當前聚類號,并獲得樣本發生增減的聚類號向量dc:

(8)
式中:dci表示行向量dc的第i個元素。式(8)表示元素i如果屬于行向量[id(dm);id′(dm)]的元素,則該元素在行向量dc保留,否則該元素在行向量dc不保留。
步驟4單樣本更新聚類階段。
①針對聚類號列向量id發生變化的樣本,由式(9)計算具有單樣本聚類(至少存在一個樣本數量為1個的聚類)樣本集合的目標函數矩陣Del:

(9)
式中:mj為j號聚類的樣本數量,j∈dc表示元素j屬于行向量dc。
②暫存聚類號列向量id和目標函數值,由式(5)同時確定Del各樣本到各聚類中心最小距離平方和組成的列向量del及對應的聚類號列向量id。
③由式(6)比較新舊聚類號列向量id、id′是否變化,確定哪些樣本改變聚類,如果有所改變則由式(7)比較樣本到新舊聚類中心距離平方和,確定是否減小;若沒有改變則判斷單樣本更新迭代收斂。
④按照式(10)得到單元素移動列向量dm。如果dm小于上一次迭代的單元素移動d′m,則繼續迭代。
dm=min (dm)
(10)
計算移動次數,并把新dm賦值給上一次迭代的單元素d′m,由式(11)暫存新舊移動聚類號單元素列向量mid、mid′。
mid′=id(dm),mid=mid(dm)
(11)
⑤由式(12)更新目標函數值E、聚類號列向量id。
E=E+Del(i,j)-Del(i,j′),id(dm)=midi∈dm,j∈mid,j′∈mid′
(12)
式中:i∈dm表示元素i屬于列向量dm;j∈mid表示元素j屬于列向量mid;j′∈mid′表示元素j′屬于列向量mid′。
由式(13)更新聚類的樣本數量mj,式(14)更新聚類中心cj:
(13)
(14)
由式(15)獲得樣本發生增減的2元素聚類號向量dc:
(15)
重復步驟4,直至單樣本更新收斂。
步驟5每一次聚類迭代后判斷各類樣本是否為空集,計算各樣本到各聚類中心的目標函數矩陣D=(dij)n×k,根據式(16)由已知聚類號列向量id,得到目標函數矩陣中各樣本到各聚類中心最小距離平方和組成的列向量d:
d=[D(1+(id1-1)·n),…,D(i+(idi-1)·n), …,D(n+(idn-1)·n)]′
(16)
式中:idi表示樣本所屬的聚類號1,2,…,k;D(i+(idi-1)·n)表示目標函數矩陣D中第i+(idi-1)·n個元素。

(17)
步驟6按照式(3)計算聚類數k的差異度代價函數,重復步驟1~步驟5,遍歷所有聚類數k=1,2,…,kmax。比較聚類數k迭代差異度代價函數,得到最優聚類數、聚類中心及對應分類。
1.3 反Hough變換編隊識別目標排序
將聚類中心反映射回原量測空間對應直線。當在雷達態勢圖中判斷各點是否在一條直線上時,就等價于在對應參數空間內找到Hough曲線交點的聚類。若設聚類中心為(θ,ρ),則由式(18)可得參數空間的點到原量測空間的反映射表達式為
(18)
式中:θ∈(0 rad,π/2 rad)∪(π/2 rad,π rad)對應的一般反映射為直線z=ax+b,直線斜率a和截距b的表達式為該直線的約束;θ=0 rad、θ=π rad對應的反映射為平行于x軸的直線,θ=π/2 rad對應的反映射為平行于z軸的直線;x、z分別為量測空間的橫軸、縱軸坐標;ρ0、ρπ和ρπ/2分別表示θ=0 rad、π rad和π/2 rad對應的ρ。
根據反映射直線識別出編隊隊形輪廓,結合各艦在編隊中的運動信息,判斷出編隊組成和基準艦,并進行編隊目標排序。
2 編隊目標生成和選擇模型
如圖1所示,編隊目標建模時以目標指示階段的隊列航向為z軸正方向,垂直z軸右手方向為x軸正方向,建立平面直角坐標系。編隊隊形要素包括:基準艦J是指為隊列提供相對位置參照的艦艇,通常位于隊列中較特殊的幾何位置處。隊列線是指由基準艦開始,隊列中各艦所在點的連線。隊列航向γ是指基準艦艏艉線與正北方向N間的夾角。編隊間距Df可分解為沿垂直基準艦艏艉線方向的橫向間距Dx和沿基準艦艏艉線方向的縱向間距Dz。看齊角α是指其他各艦艏艉線與隊列線之間夾角。隊列角β=180°-α是指基準艦艏艉線與隊列線之間夾角。
圖1 V形編隊及平行編隊示意圖Fig.1 V-shaped and parallel warship formations
為構建編隊模型,假設如下:1)編隊中不同艦艇的距離方向可被傳感器分辨;2)編隊中艦艇位置定位誤差和傳感器探測誤差符合均值為0的正態分布;3)末制導階段并未改變目標指示階段的編隊類型,或者由一種典型線型編隊隊形變化成另一種典型線型編隊隊形,編隊目標未發生位置交換,即以基準艦為參考的排序不發生變化;4)忽略海況、氣象、網絡電磁空間環境條件對導彈的影響,編隊無任何硬抗擊行動;5)目標編隊隊形出現變化類型、變化程度,均與導彈自控飛行時間無關;6)Δθ=0.1 rad;7)若相對參數|θ12|=|θ1-θ2|與無噪聲、無干擾的理想條件下的相對參數偏差不大于30%[12],則認為隊形識別正確;若相對參數偏差大于等于10%,則啟動移動檢測區間檢測,最終選擇相對參數較小的檢測區間;8)若末制導階段確認目標與目標指示階段預選目標一致,則對編隊目標的識別選擇正確。
常見線型編隊隊形[17-20]有V形、平行和環形編隊等。
2.1 V形編隊模型
2.1.1 編隊目標模擬
如圖1(a)所示,以V形編隊兩翼連接處艦艇為基準艦,設隊列角為β,隊列航向γ=0°,可得各艦的量測空間坐標為(xi,zi)(i=1,2,3,…,T),V形編隊左、右翼各艦量測空間坐標如式(19)、式(20)所示:

(19)
(20)
2.1.2 編隊識別目標排序
(21)
目標指示階段,識別基準艦編號為B,假設預設目標編號為P,則預設目標相對編號為P-B。末制導階段,識別基準艦編號為B、確認目標相對編號為P-B,則確認目標編號為B+(P-B)=P。
2.2 平行編隊模型
2.2.1 編隊目標模擬
平行編隊可分為雙橫隊和雙縱隊。幾何特征如圖1(b)所示,雙橫編隊前后隊列線、雙縱編隊左右隊列線相互平行。
平行編隊通常以指定隊列與方向的排頭艦艇為基準艦。當設隊列航向γ=0°,看齊角α始終為90°時,雙橫隊內艦艇總數為T,各艦量測空間坐標為(xi,zi)(i=1,2,3,…,T):

(22)
當設隊列航向γ=0°、看齊角α始終為0°時,雙縱隊內艦艇總數為T,各艦量測空間坐標為(xi,zi)(i=1,2,3,…,T):

(23)
2.2.2 編隊識別目標排序

2.3 環形編隊模型
2.3.1 編隊目標模擬
環形編隊通常以最中間的艦艇為基準艦。幾何特征如圖2(a)所示,水平隊列線與垂直隊列線相互垂直。圖2中,C1~C4為假目標,R為假目標與艦艇間距,γm為導彈來襲方向,假目標與艦艇的連線與導彈來襲方向呈固定角度,記為ε、δ。
圖2 環形編隊及假目標菱形布陣模式示意圖Fig.2 Ring warship formation and rhombus array of fake targets
設隊列航向γ=0°,編隊內艦艇總數為T,可得各艦在量測空間中的坐標為(xi,zi)(i=1,2,3,…,T),橫隊如式(24)所示,縱隊分兩段如式(25)所示:
(24)

(25)
2.3.2 編隊識別目標排序
(26)
3 編隊目標變化模型
編隊在戰斗中,會根據戰術需求與戰場環境,改變隊列要素,采取旋轉隊形、縮放隊形、進行沖淡式干擾等措施。
3.1 旋轉模型
整個編隊繞某點旋轉,調整隊列航向。若旋轉中心點坐標為(x0,z0),逆時針旋轉角為q,旋轉前艦艇坐標為(xi,zi),則旋轉結束后坐標(x′i,z′i)為
x′i=(xi-x0)·cosq-(zi-z0)·sinq+x0z′i=(xi-x0)·sinq+(zi-z0)·cosq+z0
(27)
3.2 縮放模型
縮放是編隊航渡和作戰過程中,在不破壞整體隊形情況下,增大/縮小編隊間距以應對戰場環境變化的過程。設k1、k2分別為橫、縱坐標縮放系數,縮放變化前后的編隊間隔(Dx,zz)和(D′x,z′z)關系為
D′x=k1·Dx,z′z=k2·Dz
(28)
當k1、k2∈(0,1)時,隊形間距縮小,k1、k2∈(1,∞)時隊形間距放大;當k1=k2時隊形間距不變。
3.3 沖淡式干擾模型
當探測到來襲導彈時,編隊艦艇會在導彈末制導雷達開機前進行沖淡式干擾,降低被導彈捕獲的概率。常用假目標空間布陣有正方形、矩形和菱形等模式。設基準艦坐標為(Jx,Jz),導彈來襲方向為γm([-180°,0°]∪[0°,180°]),則4個假目標坐標為
(29)
(30)
式中:正方形布陣,ε=δ=45°;矩形布陣,ε=δ;菱形布陣,ε≠δ,如圖2(b)所示。
3.4 編隊隊型變化模型
3.4.1 V形編隊與環形編隊之間變化
目標指示階段如式(19)、式(20)所示V形編隊,末制導階段如式(24)、式(25)所示環形編隊,可疊加式(27)所示旋轉、式(28)所示縮放變化和式(29)、式(30)所示沖淡式干擾;或者目標指示階段如式(24)、式(25)所示環形編隊,末制導階段如式(19)、式(20)所示V形編隊,可疊加式(27)所示旋轉、式(28)所示縮放變化。
目標指示階段,識別基準艦編號為B,假設預設目標編號為P,則預設目標相對編號為P-B。末制導階段,識別基準艦編號為B1、確認目標相對編號為P-B+B-B1,則確認目標編號為B1+(P-B+B-B1)=P。
3.4.2 雙橫隊和雙縱隊之間變化
目標指示階段如式(22)所示雙橫隊,末制導階段如式(23)所示雙縱隊,可疊加式(27)所示旋轉、式(28)所示縮放變化;或者目標指示階段如式(23)所示雙縱隊,末制導階段如式(22)所示雙橫隊,可疊加式(27)所示旋轉、式(28)所示縮放變化。
4 仿真分析

針對編隊位置均方差為0.3的情況,本文方法對隊形的識別率均為100%,略優于文獻[12]的效果。對采用旋轉變化的V形編隊目標的識別選擇如案例1所示;對采用旋轉變化與沖淡式干擾的環形編隊目標進行識別選擇如案例2所示;對目標指示階段為典型V形編隊、末制導階段變化為環形編隊目標的識別選擇如案例3所示;對疊加不同位置噪聲的V形編隊目標、平行橫隊目標、采用旋轉變化與沖淡式干擾的環形編隊目標、典型V形編隊變化為環形編隊目標的識別選擇如案例4所示。
4.1 案例1
想定預選攻擊編隊3號艦,目標指示階段態勢如圖3所示,設γ=0°,Dx=0.5 nmile,Dz=1 nmile,α=26.6°。x軸、z軸坐標分別疊加均值為0、均方差0.1和0.3的正態分布噪聲。為檢驗本文方法對旋轉隊形的識別效果,假定末制導階段γ變為330°。

圖3 目標指示階段V形編隊識別目標預選圖Fig.3 V-shaped formation recognition and target pre-selection in target indication stage
如圖4所示,分別用D/L方法[12]、已有L+D方法[14]、本文L+D方法進行K均值聚類。其中,D/L方法差異度代價函數體現一定遞減特性,已有L+D方法在關鍵聚類數段(2~8)緩慢增長、區分度不明顯,而本文L+D方法區分度明顯,顯示最優聚類數為2。左右翼參數P1(2.692 0,5)、P2(0.505 9,5),|θ12|=0.953 9 rad,識別為V形編隊,在目標指示態勢中畫出隊列線,判斷基準艦為5號艦。方形標注預選目標3號艦(見圖3)。末制導階段態勢如圖5所示,γ變為330°。

圖4 各種聚類數優化方法比較Fig.4 Comparison of optimal methods for clustering number
聚類分析得左右翼參數P1(0.074 0,5)、P2(1.029 5,5),|θ12|=0.955 5 rad,識別為V形編隊,判斷基準艦為5號艦,方形標注確認打擊目標3號艦。
案例1仿真結果表明,該方法能較好地識別選擇采用旋轉變化的V形編隊目標。

圖5 末制導階段V形編隊識別目標選擇圖Fig.5 V-shaped formation recognition and target confirmation in terminal guidance stage
4.2 案例2
想定預選攻擊編隊3號艦,目標指示階段,設γ=0°,Dx=1 nmile,Dz=1 nmile。坐標分別疊加均值0、均方差0.1的正態分布噪聲;假定末制導階段γ變為330°;為檢驗本文方法應對沖淡式干擾效果,設編隊在3號艦附近以矩形布陣釋放假目標。采用移動檢測區間[5Δθ,π rad+5Δθ),取Δθ=0.1 rad,進行優化K均值聚類,得最優聚類數為2,聚類結果如圖6所示。橫、縱隊參數P1(1.541 4,5)、P2(3.091 8,5),相對參數|θ12|=1.550 4≈π/2 rad,相對參數偏差1.2%,識別為環形編隊,判定基準艦為3號艦,方形標注預選目標3號艦,如圖7所示。末制導階段態勢如圖8所示,γm=0°,而γ變為330°,且放置了4個假目標。

圖6 移動檢測區間環形編隊目標指示態勢聚類參數 空間圖Fig.6 Ring formation line detection on the moving detection interval in target indication stage

圖7 移動檢測區間環形編隊目標指示態勢識別圖Fig.7 Ring formation recognition and target pre-selection on the moving detection interval in target indication stage

圖8 環形編隊末制導雷達態勢隊形識別圖Fig.8 Ring formation recognition and target confirmation in terminal guidance stage
聚類分析后得到橫、縱隊參數P1(2.065 0,5)、P2(0.473 8,5),相對參數|θ12|=1.591 2≈π/2 rad,相對參數偏差1.4%,識別為環形編隊,判斷基準艦為3號艦,方形標注確認打擊目標3號艦。

圖9 原檢測區間環形編隊目標指示態勢聚類參數空間圖Fig.9 Ring formation line detection on normal detection interval in target indication stage
如圖9所示,目標指示階段采用原檢測區間時,聚類分析后得到橫、縱隊參數P1(1.240 6,5)、P2(2.994 4,5),相對參數|θ12|=1.753 8 rad,相對參數偏差11.7%,能夠識別為環形編隊;如圖10所示,雖然目標指示階段預選3號艦,但由于判斷8號艦為基準艦,導致末制導階段識別3號艦錯誤。

圖10 原檢測區間環形編隊目標指示態勢識別圖Fig.10 Ring formation recognition and target pre-selection on normal detection interval in target indication stage
案例2仿真結果表明,本文方法能較好地識別選擇采用旋轉變化與沖淡式干擾的環形編隊目標。
4.3 案例3
想定預選攻擊編隊3號艦,目標指示階段態勢如圖3所示,設γ=0°,Dx=0.5 nmile,Dz=1 nmile,α=26.6°。x、z坐標分別疊加均值0、均方差0.1和0.3的正態分布噪聲。設末制導階段態勢如圖8所示,γ變為330°,Dx=1 nmile,Dz=1 nmile,坐標分別疊加均方差0.1的正態分布噪聲,編隊進行沖淡式干擾,在3號艦附近以矩形布陣釋放4個假目標,γm=0°,而γ變為330°。
如圖3所示,在目標指示態勢中畫出隊列線,識別為V形編隊,判斷基準艦為5號艦,方形標注預選目標3號艦。如圖8所示,末制導階段,識別為環形編隊,判斷基準艦為3號艦,方形標注確認打擊目標3號艦。
案例3仿真結果表明,本文方法能較好地識別選擇目標指示階段為典型V形編隊、末制導階段變化為環形編隊的目標。
4.4 位置誤差影響
對V形編隊目標位置疊加均值為0、不同均方差0.1~0.4范圍內的噪聲,對每種情況分別仿真1 000次,對編隊目標的識別正確率如表1所示,從中可見隨著位置均方差的增大,識別正確率下降,但保持在77%以上。

表1 V形編隊位置誤差對識別正確率影響Table 1 Effects of location error of V-shaped formation on recognition rate
對平行編隊目標位置疊加均值0、均方差0.1~0.4范圍內的噪聲,對每種情況分別仿真1 000次,識別正確率如表2所示。由表2可見:低均方差時目標指示和末制導階段的隊列線無交點比例高,兩階段無交點時識別正確,兩階段都有交點時識別基本正確,但存在相當比例前階段無交點、后階段有交點,由于對基準艦的選擇方式不一樣而識別錯誤;均方差提高時,兩階段隊列線有交點的比例提高,兩階段無交點和前階段無交點、后階段有交點的比例均降低,反而出現識別率上升的現象。對編隊目標的識別正確率保持在70%以上。
表2 平行橫隊位置誤差對識別正確率影響Table 2 Effects of location error ofparallel formation on recognition rate
對環形編隊目標位置疊加均值為0、均方差0.1~0.3范圍內的噪聲,對每種情況分別仿真1 000次,識別正確率如表3所示,從中可見隨著位置均方差增大,對編隊目標的識別正確率迅速下降,但保持在60%以上。
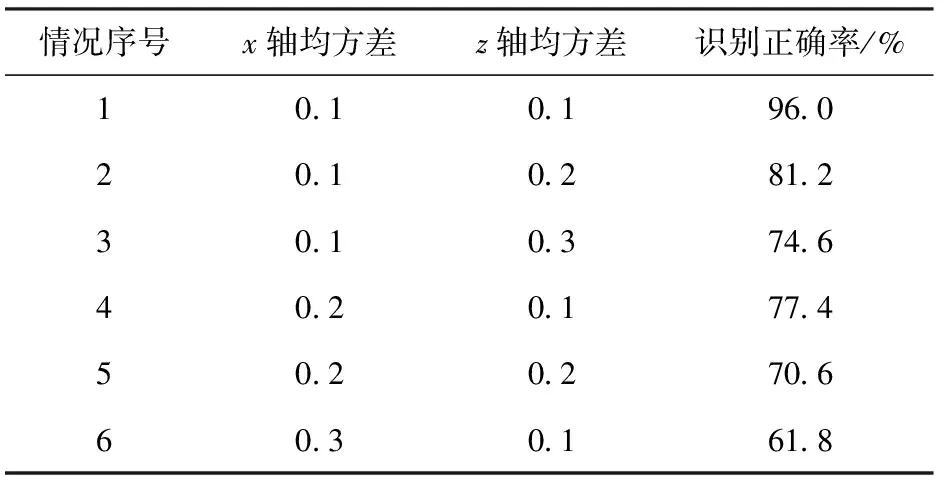
表3 環形編隊位置誤差對識別正確率影響Table 3 Effects of location error ofring formation on recognition rate
目標指示階段V形編隊目標位置疊加均值為0、不同均方差0.1~0.3范圍內的噪聲,末制導階段隊形變為γ=330°的環形編隊,3號艦附近以矩形布陣釋放沖淡式干擾假目標,且目標位置疊加和目標指示階段相同均方差的噪聲,對每種情況分別仿真1 000次,識別正確率如表4所示,從中可見對編隊目標的識別正確率介于末制導階段保持V形編隊疊加噪聲和末制導階段保持環形編隊疊加噪聲情形之間。
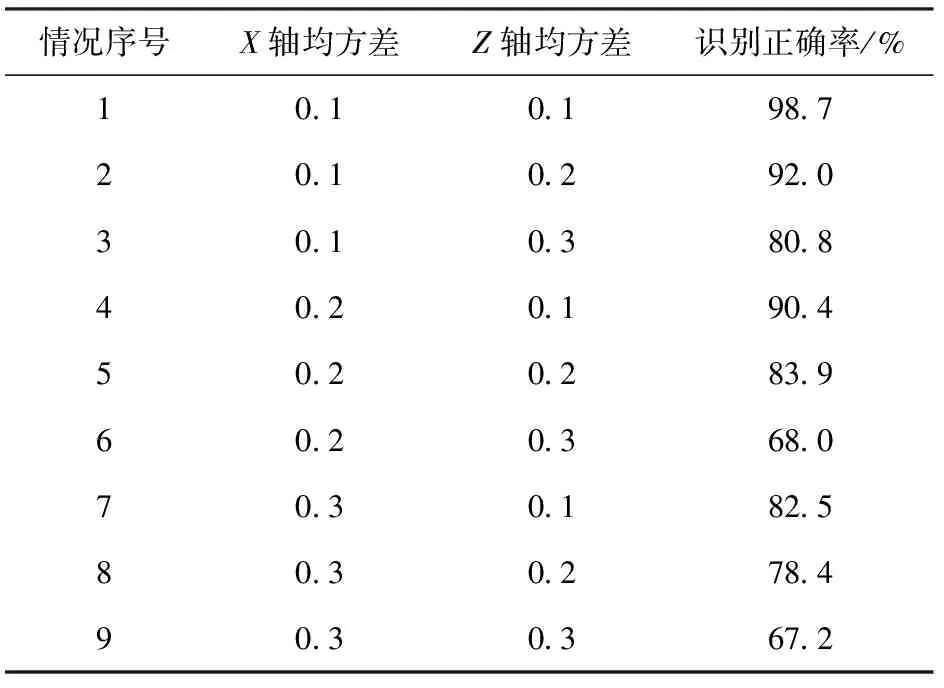
表4 隊型變化和位置誤差對識別正確率影響Table 4 Effects of formation transforming and location error on recognition rate
5 結論
1)本文提出的聚類數優化代價函數較已有方法聚類數區分度更明顯,不會陷于局部最優值,對典型樣本聚類數優化結果更真實。
2)進行多樣本更新聚類和單樣本更新聚類結合的聚類迭代,提高迭代尋優效率。
3)將優化聚類數迭代和聚類迭代融合迭代,確保了算法有較好的實時性。
4)采用移動檢測區間檢測樣本點,解決正常檢測區間兩側邊緣樣本點對應機制缺失造成的相對參數偏差較大、編隊目標識別選擇錯誤問題。
5)可以從整體上一次性識別出編隊隊形,不需要根據隊形模板庫進行一一匹配,計算簡單,計算量相對較小。
6)即使末制導階段改變目標指示階段的編隊類型,只要基準艦為參考的排序不發生變化,依然可以選擇目標指示階段的預選目標。