基于動態學習策略多群體粒子群的消磁站水下磁傳感器位置校正方法
2023-03-21 03:36:22王玉芬周國華吳軻娜李林鋒
兵工學報 2023年2期
王玉芬, 周國華, 吳軻娜, 李林鋒
(海軍工程大學 電氣工程學院, 湖北 武漢 430000)
0 引言
消磁是保證艦艇航行安全及戰斗力的必要措施,準確測量艦艇磁場是實施消磁的重要前提[1-2]。目前一般通過消磁站海底敷設的磁傳感器測量艦艇磁場。在消磁站水下磁傳感器安裝過程中,由于海洋復雜環境與水下安裝工作困難等因素影響,實際工程中磁傳感器安裝位置與理想位置存在一定的偏差。考慮到水下磁傳感器的現有安裝工藝水平,位置偏差幅值約0.3 m,一定程度上給艦艇磁場測量帶來了誤差。為提高艦艇磁場測量精度,必須對消磁站水下磁傳感器的位置進行校正。
目前最常見的方法是通過聲波或光波等介質對傳感器進行定位,但是消磁站半封閉式的環境和渾濁的水質給聲波和光波定位的實施帶來了困難[3]。相比而言,利用已知位置的磁源,通過磁傳感器的磁場測量值來反推磁傳感器的位置,給水下磁傳感器定位提供了一種可行的技術思路[4-6]。文獻[7]研究了根據三軸磁力計和已知磁偶極子的船只定位水下傳感器網絡。文獻[8]研究了在某些磁傳感器上加裝輔助螺線管線圈對動態檢測站的磁傳感器進行定位。文獻[9]研究了采用海面通電線圈作為磁偶極子磁源,使用深度傳感器,將三維問題簡化為二維問題,再求解位置矢量。文獻[10]研究了利用磁偶極子完備性得到的位置矢量解析表達式對動態檢測站臨時布防的磁傳感器進行快速定位。文獻[11]研究了基于模值的標量定位方式解決背景地磁異常對磁傳感器的影響。文獻[12]介紹了基于振蕩磁場的水下定位方法。這些方法為消磁站水下磁傳感器定位提供了一定參考意義,但由于應用背景的條件差異,上述方法直接應用于消磁站水下磁傳感器位置誤差校正難以達到厘米級定位要求。
本文提出一種利用岸上已知位置的載流線圈作為磁源,以消磁站水下磁傳感器理想安裝位置為初始輸入,通過磁傳感器測量數據優化反演其位置矢量偏差,再確定水下磁傳感器實際位置的定位方法,為消除位置偏差對艦艇磁場測量的影響奠定了基礎。
1 磁傳感器位置偏差對磁場測量精度的量化關系研究
為定量分析水下磁傳感器位置偏差給艦艇磁場測量帶來的影響,采用COMSOL有限元仿真軟件建立潛艇垂向感應磁場Ziz數值仿真模型。按圖1所示建立坐標系Oxyz,Pm表示磁傳感器的實際位置,P(x,y,z)表示磁傳感器的理想位置。設置垂向背景場為35 000 nT,龍骨下11個感應磁場計算點坐標取為:x取-25~25 m、間距5 m,y取0 m,z取15 m。為模擬不同幅值的位置偏差對磁傳感器磁場測量的影響,選取一個磁場計算點隨機耦合幅值為0.1~0.4 m的位置偏差,并開展100次數值仿真實驗。

圖1 潛艇物理模型幾何示意圖Fig.1 Geometric diagram of a submarine’s physical model
圖2給出了龍骨下11個計算點位置誤差水平為0.3 m時的感應磁場Ziz與理想情況下的對比圖。表1給出了計算點P(-15 m,0 m,15 m)在不同位置偏差幅值下的磁場測量誤差。
圖2 龍骨下磁場對比Fig.2 Comparison of magnetic field under the keel

表1 磁傳感器位置偏差仿真結果Table 1 Simulation results of sensor position deviation
表1的結果表明,隨著位置偏差的增大,磁場測量誤差越來越大;實際工程中磁傳感器0.3 m的安裝偏差可帶來上百納特的誤差,直接降低了艦艇磁場測量精度,進而影響了艦艇磁性防護能力評估;當磁傳感器位置偏差為0.1 m時,艦艇磁場測量誤差可控制在50 nT以內,滿足艦艇磁場測量要求。
2 磁傳感器位置校正模型
2.1 位置校正模型
如圖3所示,ri(xi,yi,zi)(i=1,2,…,s,s為測量位置的個數)表示理想位置P(x,y,z)相對于磁源的位置矢徑,rm表示實際位置Pm相對于磁源的位置矢徑,Δr(Δx,Δy,Δz)表示磁傳感器的位置偏差,磁源從C1不連續移動到Cs。由于消磁站多采用單軸(z軸)磁傳感器采集艦艇磁場數據,并考慮到借助萬向平衡機構,磁傳感器可準確獲取磁場垂向分量Bz,采用Bz開展磁傳感器的位置校正工作。

圖3 位置校正原理示意圖Fig.3 Schematic diagram of position correction
磁傳感器位置校正的基本原理為:磁源沿預設軌跡不連續移動,同時磁傳感器測量并記錄磁場垂向分量Bz,根據磁傳感器的測量值與理想位置P的磁場計算值之間的差異,計算得出偏差矢量Δr(Δx,Δy,Δz),從而實現磁傳感器的位置校正。

(1)
式中:m表示磁源的磁矩;f(·)表示磁源的空間磁場分布函數。通過磁場測量值和計算值建立位置校正目標函數如式(2)所示:
(2)
通過合理設計磁源和優化求解目標函數式(2),即可獲得磁傳感器的偏差矢量Δr,從而實現磁傳感器的位置校正。
2.2 磁偶極子磁源模型
結合消磁站應用實際,采用載流線圈作為磁源。以線圈中心為坐標中心,按照圖4所示建立坐標系(圖4中,Nw表示線圈匝數,I表示電流,R表示線圈半徑,α表示電流元位置矢量的夾角,dl表示電流元長度),則空間中任意一點P(x,y,z)的磁場垂向分量解析計算公式如下:
(3)
式中:μ0表示真空磁導率。

圖4 載流線圈磁場計算示意圖Fig.4 Diagram of magnetic field calculation of current-carrying coil
在迭代優化過程中,每次迭代計算式(3)積分非常耗時,為簡化計算,當測量點與線圈中心之間的距離遠大于線圈半徑R時,可將載流線圈等效為磁偶極子,由磁偶極子的標準公式[14]分解,得
(4)
式中:m表示磁偶極矩的大小,方向垂直向下,m=|NwIA|,A為載流線圈的面積。
2.3 優化求解
式(2)是一種多峰函數,普通的粒子群優化算法[15]在求解此類問題時易陷入局部最優,因此不適用于目標函數的求解。
為更好地確定位置偏差矢量,采取動態學習策略多群體粒子群優化算法[16]優化求解目標函數。相對于普通的優化算法,動態學習策略多群體粒子群優化算法有兩個方面的改進:一是在粒子群優化算法中引入多個種群同時尋優以避免早熟收斂,并在一定程度上保持種群的多樣性;二是為提高全局探索性能及計算速度,將動態學習策略引入多群體粒子群優化算法中。
初始化階段與普通粒子群相同[17]:初始粒子的位置xi及其速度vi在可行解空間以及速度空間中隨機產生,賦予每個粒子適應度函數fitness,并設立當前位置為個體最優pbest。
原始種群中粒子被分成M個子群。每個子群的最佳粒子被記錄為lbest,并根據式(5)指導該lbest所在子群的其他粒子運動。
(5)
(6)
式中:w表示慣性權重;c1和c2表示加速度;r1和r2表示[0,1]范圍中的隨機變化數;d表示當前迭代次數。
每次迭代時,每個粒子都有兩種并行類型的學習方法:式(5)和式(7),一個粒子的學習每次迭代只會執行一種方法。每個子群中的粒子分為普通粒子和通信粒子,普通粒子的概率為1-p,通過式(5)在其子群中尋找更好的位置;通信粒子的概率為p,通過式(7)在新的搜索區域進行學習:
(7)
p=d/itermax
(8)
式中:lbestq表示第q個子群中達到的最佳位置,其平均值被命名為聯合最優,對全局最優gbest進行迭代更新;itermax表示最大迭代次數;參數p(p∈[0,1])的設置服從于函數式(8),隨著d的增加而增大,從而增加子群中通信粒子的數量。圖5清楚地解釋了動態學習策略多群體粒子群優化算法的動態學習機制。

圖5 動態學習機制方案Fig.5 Dynamic learning mechanism scheme
基于動態學習策略多群體粒子群的位置校正步驟具體如下:
步驟1初始化參數:理想安裝位置P,磁場測量值Bzh,磁源的測量移動軌跡Ci,慣性權重w,加速度c1、c2,速度域等。
步驟2根據位置x初始化種群,并將種群分為M個子群,同時初始化位置個體最優,子群最優和聯合最優。
步驟3隨機產生普通粒子和通信粒子,普通粒子執行式(4)更新速度,通信粒子執行式(6)更新速度。
步驟4將每一個粒子適應度與歷史最優進行對比,若目前適應度更優,則目前適應度更新。
步驟5將普通粒子的適應度與所在子群內的歷史最優位置進行對比,若子群的最佳適應度更優,則更新。通信粒子的適應度與聯合最優比較,若目前通信粒子的最佳適應度更優,則更新聯合最優。
步驟6依據式(5)更新所有粒子的位置。
步驟7如果達到結束條件,則返回目前最優位置,結束計算;否則返回步驟3。
步驟8輸出:磁傳感器的偏差矢量Δr(Δx,Δy,Δz)。
3 數值模擬實驗
為檢驗位置校正方法的有效性,按圖6所示建立坐標系,磁源位于消磁碼頭平面,磁傳感器位于15 m深的海底平面,距離碼頭10 m。考慮實際消磁站水下磁傳感器位置校正的影響因素,從磁偶極子等效誤差、磁傳感器測量精度和環境噪聲等方面開展數值模擬實驗,定量分析對位置校正的影響程度,并結合典型消磁站模型參數開展位置校正模擬實驗。

圖6 仿真模型示意圖Fig.6 Schematic diagram of simulation model
3.1 磁偶極子等效誤差
為簡化計算,將載流線圈等效成磁偶極子,結合消磁站的構造,在水下15 m深度開展磁偶極子等效誤差的數值模擬實驗。磁偶極子等效誤差的計算如式(9)所示:
(9)

實驗結果如圖7所示,磁偶極子等效誤差隨著距離的增加而降低,位于海底平面的磁傳感器與載流線圈的水平距離大于4 m時,磁偶極子等效誤差小于2 nT,相對誤差小于0.53%。與磁傳感器磁場測量值(約400 nT)相比,磁偶極子等效誤差對位置校正的影響可忽略不計。因此,可將載流線圈等效成磁偶極子,以提高計算效率。
圖7 磁偶極子等效誤差分析Fig.7 Equivalent error analysis of magnetic dipole
3.2 磁傳感器測量精度
為綜合評定磁傳感器測量精度對磁傳感器位置校正的影響,選取位置偏差(0.3 m,0.3 m,0.3 m),結合消磁站磁傳感器測量精度的實際情況,在不考慮其他干擾條件的情況下,引入4種測量精度:0.1 nT、1 nT、5 nT、10 nT,并開展100次數值仿真實驗。
實驗結果如圖8所示,磁傳感器位置校正的誤差隨著測量精度的降低不斷增大,當測量精度為0.1 nT時,位置誤差可忽略不計;當測量精度為 10 nT 時,位置校正后z軸方向的平均誤差超過0.04 m。 其中,目前應用最為廣泛的磁傳感器測量精度為1 nT,位置校正后,磁傳感器x軸、y軸和z軸3個方向的平均位置誤差均小于0.01 m。
圖8 磁傳感器測量精度誤差分析Fig.8 Analysis of sensor measurement accuracy error
3.3 環境噪聲
為分析環境噪聲對位置校正的影響程度,磁傳感器測量精度為1 nT,位置偏差取(0.3 m,0.3 m,0.3 m),引入5個等級的環境噪聲:0 nT、10 nT、20 nT、30 nT、40 nT,并開展100次數值仿真實驗,結果如圖9所示:磁傳感器位置校正的誤差隨著環境噪聲的增大而增大;結合消磁站實際,當環境噪聲處于10 nT級別時,磁傳感器位置校正后,x軸、y軸和z軸3個方向的平均位置誤差均小于0.1 m。

圖9 環境噪聲誤差分析Fig.9 Analysis of ambient noise error in sensor measurement
3.4 位置校正數值模擬實驗
結合消磁站實際情況,設計數值模擬實驗。磁傳感器精度取為1 nT,環境噪聲等級取為10 nT,磁源的磁矩大小為31 416 A·m2,方向垂直向下。磁源移動11次,具體坐標如下:x取10~30 m、間距2 m,y取10 m,z取0 m,待校正磁傳感器的理想位置坐標為P(0 m,20 m,15 m)。由于消磁站水下磁傳感器安裝的位置誤差可控制在0.3 m范圍內,設置 8種關于0.3 m的位置偏差狀態,并開展位置校正仿真實驗。
實驗結果如表2所示:位置校正后,x軸方向的最大誤差為0.022 m,y軸方向的最大誤差為0.029 m,z軸方向的最大誤差為0.058 m;磁傳感器x軸、y軸和z軸3個方向的位置誤差均小于 0.1 m,校正后的位置誤差降低了一個數量級。
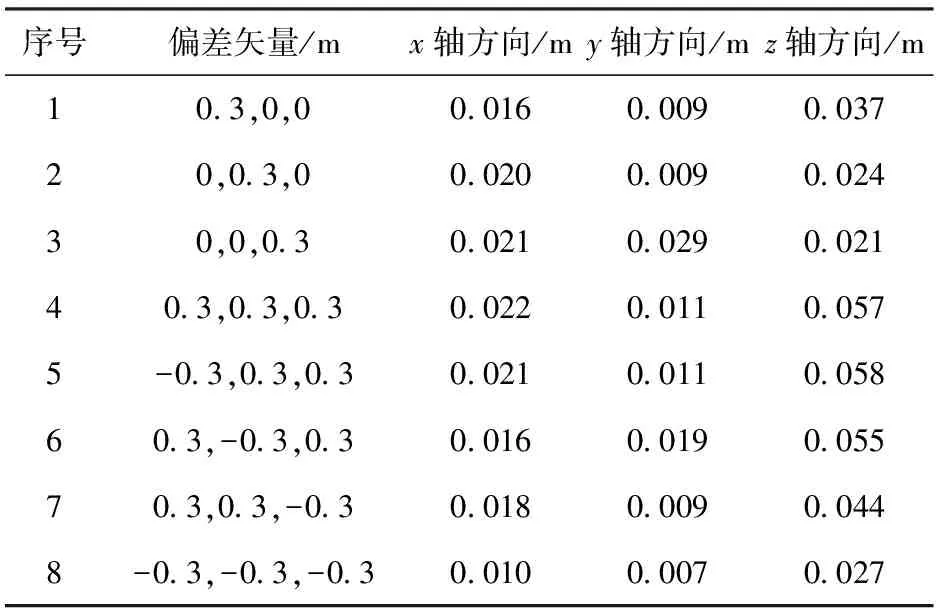
表2 磁傳感器位置校正仿真結果Table 2 Simulation results of sensor position correction
4 物理縮比模型實驗
為進一步驗證磁傳感器位置校正方法的準確性,設計1∶8.3物理縮比模型實驗。物理模型實驗如圖10所示,磁源磁矩為(-5.5 A·m2,-13.2 A·m2,105.7 A·m2),磁傳感器測量精度為1 nT;由于實驗條件的限制,為盡量降低測量的復雜性,將磁源移動次數設置為3次,具體坐標如下:x取0~0.5 m、間距0.25 m,y取0 m,z取0 m,待校正磁傳感器的理想位置坐標為P(0 m,1.2 m,1.8 m)。

圖10 模型實驗布置圖Fig.10 Layout of model experiment
考慮到磁傳感器尺寸和物理模型比例尺度,選擇位置偏差為0.1 m,設置偏差水平為0.1 m的5種位置偏差狀態,實驗結果如圖11所示。圖11中,1、2、3、4、5表示5種位置偏差狀態下磁傳感器的位置。表3為模型實驗結果。由表3可知,x軸方向的最大誤差為0.78 cm,y軸方向的最大誤差為 0.81 cm,z軸方向的最大誤差為1.16 cm。

圖11 實驗結果Fig.11 Experimental results
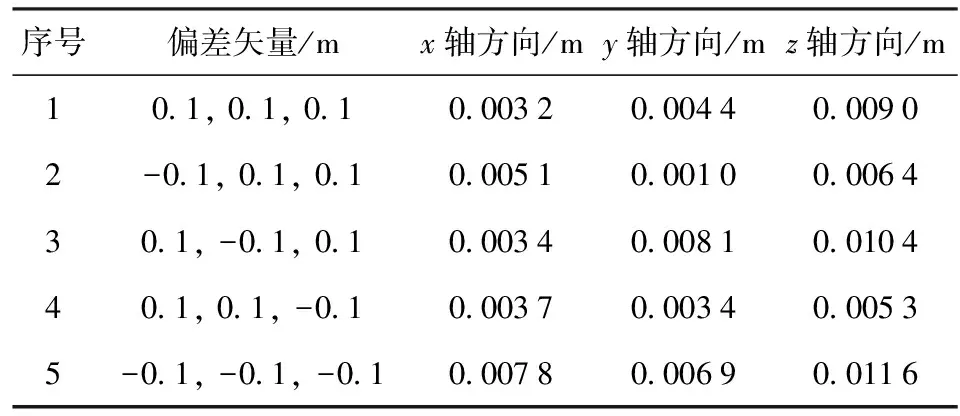
表3 模型實驗結果Table 3 Model’s experimental results
根據物理模型比例尺度,實際消磁站水下磁傳感器位置校正后,x軸方向的最大誤差為0.065 m,y軸方向的最大誤差0.067 5 m,z軸方向的最大誤差為0.097 m。校正后磁傳感器x軸、y軸和z軸 3個方向的位置誤差均小于0.1 m,滿足艦艇磁場測量要求,并驗證了位置校正方法的有效性。
5 結論
本文通過線性多重計量方法改變磁源與磁傳感器的相對位置,建立水下磁傳感器位置校正模型,并采用動態學習策略多群體粒子群優化算法求得位置偏差矢量,從而實現了消磁站水下磁傳感器位置的高精度校正。通過數值模擬實驗和物理模型縮比實驗對位置校正方法的有效性進行驗證。得出以下主要結論:
1)對艦艇磁場測量精度隨水下磁傳感器位置誤差的影響關系進行了量化研究,結果表明磁傳感器在實際安裝誤差不大于0.3 m時,艦艇磁場測量的誤差可達上百納特,為實現艦艇磁場的高精度測量,必須對磁傳感器的位置進行校正。
2)提出了一種基于動態學習策略多群體粒子群優化算法的消磁站水下磁傳感器位置校正方法,對磁偶極子等效誤差、磁傳感器測量精度和環境噪聲等影響位置校正精度的因素進行了定量分析,其中環境噪聲帶來的影響最大。
3)設計了典型消磁站的物理縮比模型實驗,驗證了本文方法的有效性和準確性。新方法可對位置偏差不大于0.3 m的消磁站水下磁傳感器完成校正工作,校正后x軸、y軸和z軸3個方向的位置誤差均小于0.1 m,可滿足鐵磁性艦艇消磁站磁場測量誤差50 nT的一般要求。
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21