基于OCR 技術的岸橋智能視覺識別系統設計
2023-03-23 05:50:04姜雙慶
設備管理與維修 2023年4期
姜雙慶
(上海振華重工(集團)股份有限公司,上海 200125)
0 引言
港口擁堵,集裝箱無法及時轉運導致積壓嚴重,因此設計一套智能視覺識別系統十分必要。
STS AI-VRS(Artificial Intelligent Vision Recognition System for STS,岸橋智能視覺識別系統),采用目前最先進的OCR(Optical Character Recognition,光學字符識別)人工識別技術,能準確識別箱號、箱門朝向、危標有無、鉛封有無、集裝箱殘損、集卡車號等信息,同時與TOS(Termial Opration System,碼頭管理系統)進行無縫結合,實現自動化、智能化作業,可有效降低人工查驗操作的勞動強度,規避安全隱患,節省人工成本,助力港口行業轉型升級。
1 岸橋智能視覺識別系統設計方案
1.1 系統硬件設計
岸橋智能視覺識別系統硬件部分包括高清攝像機、通信機箱、控制柜、中心服務器(一般用戶提供)等,其中通信機箱由交換機、光纖模塊、電源模塊等集成,負責前端攝像機的供電和通信;控制柜內放置控制器、交換機、光纖模塊和電源模塊,擺放在電氣房指定位置;中心服務器,安裝在碼頭中控室內。硬件系統拓撲結構如圖1 所示。

圖1 硬件系統拓撲結構
系統選用12 個iDS-2DF84321XR-AFW 高清球機,每臺攝像機都自帶紅外補光燈和雨刷,保證集裝箱號字符區域達到系統要求的光照度。高清攝像機整體布局如圖2 所示。

圖2 高清攝像機整體布局
(1)1~3 號和4~6 號攝像機分別安裝在陸側和海側下橫梁,分別拍攝集裝箱陸側面和海側面箱號。2 號、5 號攝像機安裝在吊具中心點位置。
(2)7~9 號和10~12 號攝像機分別安裝在左、右側聯系梁下邊沿外側,實現對集裝箱前后兩側的圖像采集功能。聯系梁左、右兩側對稱攝像機為一組,6 條作業車道分為3 組:7 號和10號為一組,8 號和11 號為一組,9 號和12 號為一組,每組攝像機負責兩條作業車道的圖像采集工作,用于拍攝集裝箱前后箱門圖像,為驗殘、鉛封、箱門朝向識別提供完整圖像數據。
1.2 系統軟件設計
軟件系統工作原理:系統與PLC 聯動,精準觸發高清攝像機抓拍集裝箱和集卡車特定位置圖像數據,并對數據分析處理自動識別集裝箱號碼、箱門朝向、集卡車號碼以及作業狀態等信息,將識別結果信息借助光纖通信方式,上傳至服務器并通過新加入的圖像數據樣本進行訓練學習來持續完善算法模型。同時上傳識別結果到TOS 系統,完成作業確認等業務邏輯處理,最后通過配備的顯示器可視化顯示本次識別信息。
軟件系統邏輯如圖3 所示,軟件系統主要由以下5 部分組成:
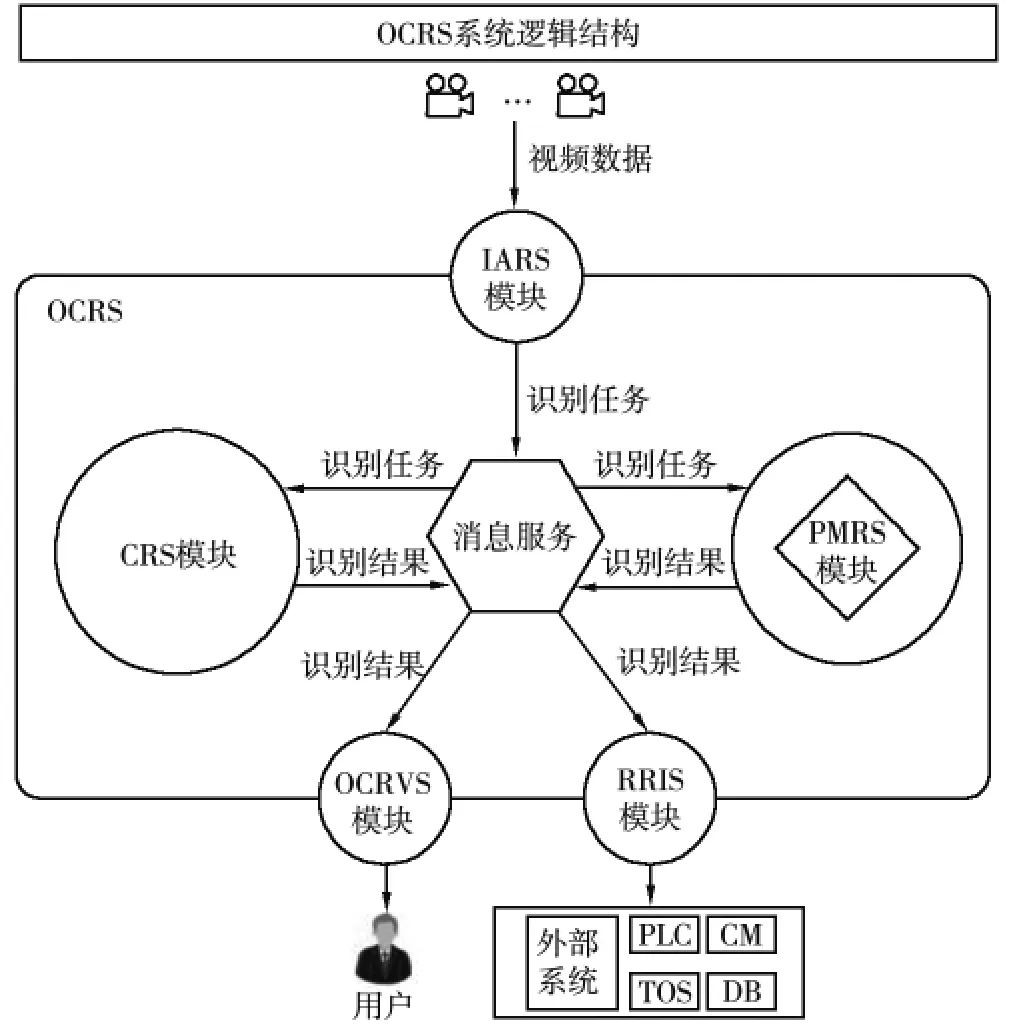
圖3 軟件系統邏輯結構
(1)IARS(Image Acquisition and Recording System,圖像采集系統)。主要實現控制攝像機對集裝箱箱體或集卡車特定位置的圖像采集。
(2)CRS(Container Recognition System,集裝箱識別系統)。主要實現集裝箱特征檢測與識別功能。識別算法采用最先進的深度學習算法,可持續不斷地訓練迭代并完善算法模型,是一種識別精度高的有監督深度特征的識別與分類系統。
(3)PMRS(PM Recognition System,集卡車識別系統)。主要實現集卡車車頂號碼識別功能。基于端到端的深度學習方法,可快速定位車頂號碼位置并準確識別車頂號碼。
(4)RRIS(Recognition Result Interface System,識別結果接口系統)。主要實現對集裝箱多個箱面識別結果進行高度復核校驗,得到高識別率的識別結果,并與TOS 等外部系統接口對接并上傳識別結果。
(5)OCRVS(OCR Visualization System,智能視覺識別可視化系統)。主要實現識別過程和識別結果、作業狀態和設備的運行狀態等信息數據可視化,供操作人員查看歷史數據和故障記錄。
2 岸橋智能視覺識別系統在碼頭的應用
2.1 集裝箱箱號識別
圖像采集系統根據PLC 信息中吊具模式的不同,分為3 個觸發組,單20 尺觸發組、單40 尺、45 尺觸發組和雙20 尺觸發組,每個觸發組拍攝集裝箱海側和陸側兩個箱面圖像,對兩個箱面識別結果進行高度復核校驗得到高識別率的識別結果信息,有效規避集裝箱單側面箱號殘損無法識別情況。
(1)單20 尺觸發組使用2 號、5 號攝像機拍攝集裝箱兩側箱面。
(2)單40 尺、45 尺觸發組使用3 號、4 號攝像機拍攝集裝箱兩側箱面。
(3)雙20 尺觸發組使用2 號、4 號攝像機拍攝前集裝箱兩側箱面,使用3 號、5 號攝像機拍攝后集裝箱兩側箱面。
2.2 箱門朝向識別
通過聯系梁8 號、10 號攝像機拍攝的集裝箱前后門圖像,利用前后門特征點檢測,進行智能識別,在兩組圖像中檢測出箱門圖像,同時結合攝像機安裝位置判斷出箱門朝向。
2.3 集裝箱危標識別
利用拍攝的集裝箱側面圖像和前后門圖像,基于神經網絡的圖像識別技術,根據危標品特征信息,從箱面圖片中定位得到危險品標識區域,檢測出集裝箱上是否存在危險品標識或危險性標記。
2.4 集裝箱鉛封識別
通過對聯系梁攝像機拍攝的集裝箱前后門圖像進行智能識別,檢測鉛封區域,識別鉛封有無。
2.5 集裝箱殘損識別
利用下橫梁1~6 號攝像機對集裝箱側面箱體進行拍攝,每臺攝像機拍攝4 m 的箱體范圍的集裝箱側面圖像,對于單20尺集裝箱,系統每面采集2 張集裝箱側面圖像,對于雙20 尺、40尺、45 尺集裝箱,系統采集6 張集裝箱側面圖像,并對集裝箱側面圖片拼接,得到集裝箱側面完整圖像;利用聯系梁攝像機拍攝的前后門圖像和集裝箱頂部圖像,提供前、后、左、右、上5 個集裝箱圖像,為集裝箱殘損檢測提供輔助圖像憑證,供操作人員進行查看和判斷,根據檢驗情況在屏幕的復選框上記錄集裝箱箱損信息,并將作業時間、箱號、箱損檢驗結果等信息存儲到指定的服務器中。
2.6 集卡車車頂號碼識別
利用聯系梁攝像機對集卡車車頂號碼進行拍攝,圖像采集系統根據PLC 輸出的集卡車車頭位置信息或者車行進方向等信息,控制攝像機云臺角度調整和觸發圖像采集,拍攝集卡車車頂號碼圖像,并將拍攝圖像上傳至集卡車識別系統。
以上6 個功能需要通過采集前、后、左、右、上5 個集裝箱圖像來實現,智能視覺識別可視化系統OCRVS 軟件可以集合這5個面在同一個可視化的顯示器界面內。把識別過程和識別結果、作業狀態和設備的運行狀態等信息數據可視化;同時提供靈活的歷史數據查詢,可按時間、設備號、箱號、集卡號、作業類型等多種方式查詢圖像、識別結果、異常事件、作業數量等歷史數據;識別結果查驗,操作人員可以使用可視化系統查驗、修改錯誤識別信息。
3 結語
基于OCR 技術設計的智能視覺識別系統,能智能識別集裝箱箱號、箱門朝向、集裝箱危標、鉛封檢測、集裝箱殘損和集卡車車頂號碼。配備的高清攝像機可以在全天候條件下工作,適用于碼頭上各類高溫、潮濕、大風、腐蝕等惡劣環境。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
