CASIO fx-5800P在工程測量導線計算中的應用
2023-03-25 09:02:56張蕾
河南科技 2023年5期
張 蕾
(蘭州現代職業學院,甘肅 蘭州 730300)
0 引言
CASIO 公司的fx 系列電子計算器是在二十世紀七十年代末期被引入我國的,是最早被引入我國的便攜式程序型電子計算器。其一進入我國,就被測量工作者應用到測量計算工作中。在這種便攜式程序型電子計算器被引入之前,我國的測量計算工作主要依靠繁雜的計算表(如水準測量計算表、導線計算表及各種曲線測設表等),再用手工作業的方式來完成計算工作,這種計算方式不但費時費力,還容易出現錯誤。如果使用筆記本電腦,其不僅對外界的環境要求較高,且不便攜帶。而如果使用掌上電腦,雖便于攜帶,但其價格偏高,且不方便計算。這種可放進口袋、跟手機大小一樣的可程序型計算器能有效解決上述問題[1]。CASIO fx計算器是利用編制好的程序,只要輸入已知數據,其就能馬上顯示出精確計算結果的。通過將這種便攜式電子計算器引入到測量工作中,使測量計算工作發生極大的變化,大大加快計算速度,且有效提高計算的精度。CASIO fx-5800P 可程序電子計算器在日常測量工作中具有廣闊的應用前景。
導線測量作為平面控制網的主要形式,主要用于道路工程測量、建筑工程測量等控制測量中,主要有閉合導線、附合導線和支導線三種形式。由于支導線缺乏檢核條件,往往用于往返測量[2]。本研究對閉合導線和附合導線進行研究,從導線的外業出發,利用導線點的計算公式來闡述計算過程,通過程序的編輯和運行,得到平差后導線點的坐標。
1 閉合導線簡易平差
閉合導線如圖1 所示。已知起始邊12 的坐標方位角為α0及起點1的坐標為(X0,Y0)。觀測各轉折角度(內角)β及各邊水平距離D,從而平差計算出各導線點的坐標。
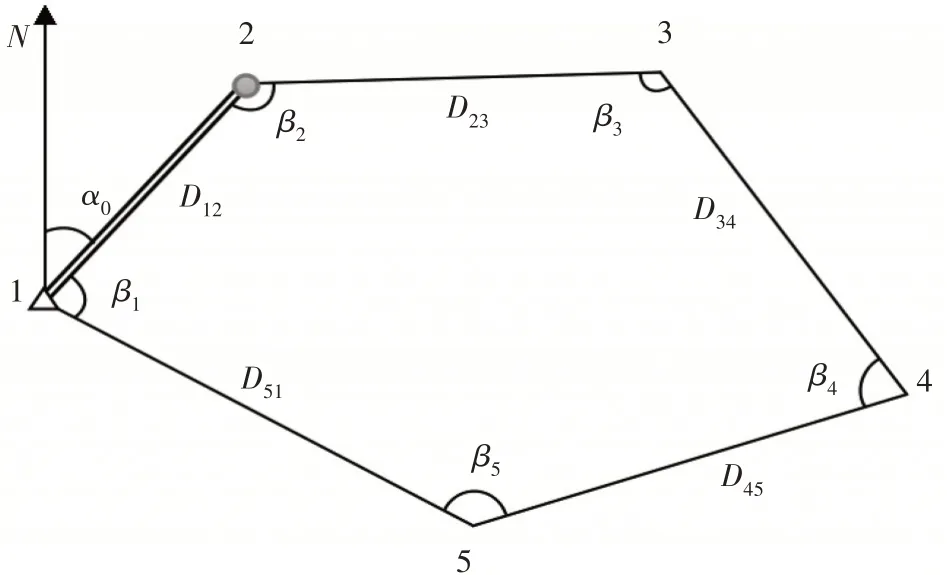
圖1 閉合導線
1.1 公式推導
閉合導線角度閉合差的計算公式見式(1)。
式中:β為觀測角值;n為觀測角個數。
閉合導線角度改正數的計算公式見式(2)。
閉合導線改正后的角度的計算公式見式(3)。
閉合導線方位角閉差的計算公式見式(4)。
式中:當β為左角時取“+”,當β為右角時取“-”;αi+1為后面一條直線的方位角;αi為前面一條直線的方位角;βi為兩直線間的夾角。
閉合導線橫縱坐標增量的計算公式見式(5)、式(6)。
式中:Di為第i條邊的水平距離。
閉合導線橫縱坐標增量閉合差的計算公式見式(7)、式(8)。
式中:ΔX為橫坐標增量;ΔY為縱坐標增量。
閉合導線全長絕對閉合差的計算公式見式(9)。
閉合導線全長相對閉合差的計算公式見式(10)。
閉合導線橫縱坐標增量改正數的計算公式見式(11)、式(12)。
閉合導線改正后的橫縱坐標增量的計算公式見式(13)、式(14)。
閉合導線橫縱坐標的計算公式見式(15)、式(16)。
1.2 程序編寫
本研究所編寫的閉合導線簡易平差計算程序如下所示。
1.3 程序運行
在程序運行時,首先,要輸入閉合導線的邊數BIAN SHU、起始點坐標(X°,Y°)、起始邊坐標的方位角α°,并輸入導線轉折角的符號JIAODU FUHAO(ZUO:1,YOU:- 1) 。當導線轉折角為左轉折角(按逆時針方向編號進行推算)時輸入1,當導線轉折角為右轉折角(按順時針方向編號進行推算時)輸入-1[3]。其次,從第2點開始,依次輸入各導線點的角度JIAO DU,在輸入完所有角度數據后,會顯示出角度閉合差JIAODU BIHE CHA 的數值。然后,從第1 條邊開始,依次輸入各導線邊的邊長(水平距離)JU LI。當輸入完所有距離數據后,就會顯示出導線全長的相對閉合差K= 1 :****** 。最后,從第2 點開始,依次顯示出各導線點的坐標(X、Y)值。
1.4 案例應用
將一個四邊形的閉合導線按順時針方向進行編號,分別編為1、2、3、4。已知12 邊的坐標方位角為35°25'00″,1 號點的坐標為(6 500 m,8 500 m),各角度與邊長的觀測值見表1,用簡易平差的方法來計算各導線點的坐標。
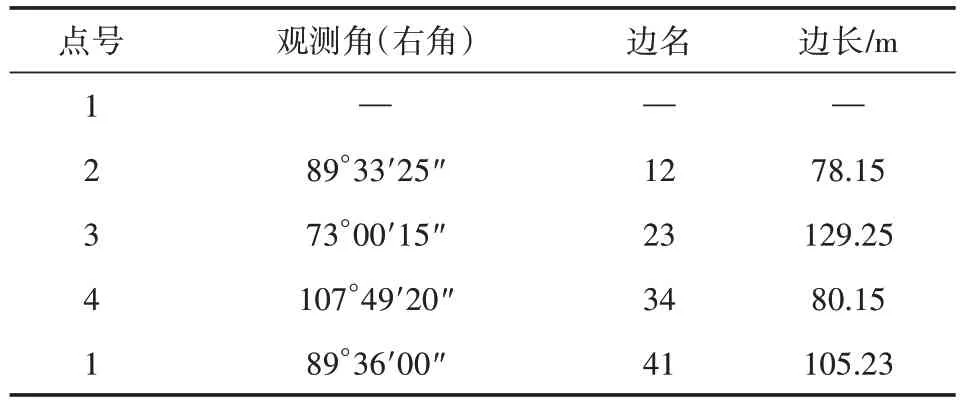
表1 各角度與邊長的觀測值
開機運行DAOXIAN BIHE 程序,首先,輸入邊長數量BIANSHU=4,輸入1 號點(起始點)的坐標,即X0=6 500 m、Y0=8 500 m,和12邊(起始邊)的坐標方位角α°=35°25'00″,并輸入轉角符號JIAODU FUHAO(ZUO:1,YOU:-1)=-1。其次,依次輸入四 個 水平角度,即JIAODU=89°33'25″、JIAODU=73°00'15″、JIAODU = 107°49'20″、JIAODU =89°36'00″。此時,會顯示角度閉合差JIAODU BIHE CHA=-0°1'0″。然后,從第1條邊開始,依次輸入四條邊的水平距離JULI=78.15 m、JULI=129.25 m、JULI=80.15 m、JULI=105.23 m。最后,已知的數據輸入完畢,計算后顯示導線全長的相對閉合差K=1:10 363.000,并從2 號點開始,依次顯示2、3、4、1各導線點的坐標,即(6 563.696 m,8 545.292 m)、(6 488.000m,8650.053m)、(6439.602m,8586.174m)、(6 500.000 m,8 500.000 m)。
2 附合導線簡易平差
附合導線如圖2 所示,已知起始邊AB 的坐標方位角為α0,起點B 的坐標為(X0,Y0),終邊CD 的坐標方位角為αn,終點C 的坐標為(Xn,Yn)。共觀測了n條邊長D和n+1個角度β。
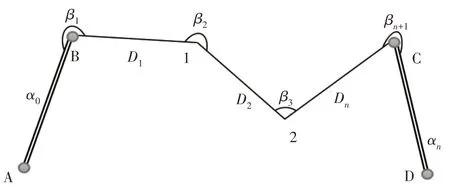
圖2 附合導線
2.1 公式推導
附合導線簡易平差的計算公式與閉合導線簡易平差的計算公式基本相同,不同之處在于角度閉合差與坐標增量閉合差的計算方法。
附合導線角度閉合差的計算公式見式(17)。
注:當β為左角時取“+”,當β為右角時取“-”。
附合導線橫縱坐標增量閉合差的計算公式見式(18)、式(19)。
2.2 程序編寫
本研究所編寫的附合導線簡易平差計算程序如下所示。
2.3 程序運行
在程序運行時,首先,輸入附合導線的邊數BIAN SHU、起始點坐標(X°,Y°)、終點坐標(Xn,Yn)、起始邊的坐標方位角α°、終邊的坐標方位角αn,并輸入導線轉折角的符號JIAODU FUHAO(ZUO:1,YOU:-1)。當輸入的導線轉折角為左轉折角時輸入1,當輸入的導線轉折角為右轉折角輸入-1。其次,從第1 點開始,依次輸入各導線點的角度JIAO DU,在輸入完所有角度數據后,就會顯示出角度閉合差JIAODU BIHE CHA 的數值,然后,從第1條邊開始,依次輸入各導線邊的邊長(水平距離)JU LI,輸入完所有距離數據后,就會顯示出導線全長的相對閉合差K=1:******,最后,從第1 點開始,依次顯示出各導線點的坐標值。
2.4 案例應用
一個條附合導線有4 條邊,觀測路線左角。已知起始邊AB的坐標方位角為237°55'20″,起始點B的坐標為(5 534.570 m,4 252.460 m),終邊CD的坐標方位角為138°27'08″,終點C的坐標為(5 204.380 m,4 543.750 m),各角度與邊長的觀測值詳見表2,用簡易平差法來計算各導線點的坐標。
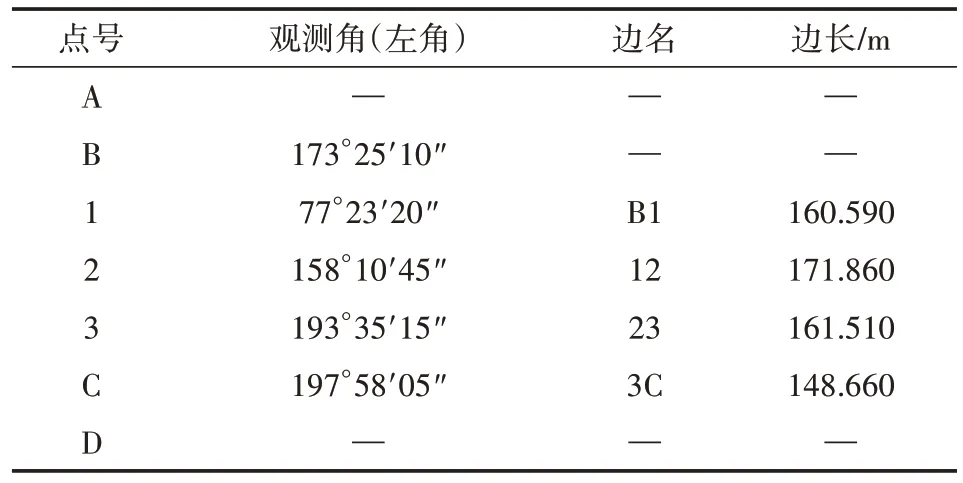
表2 各角度與邊長的觀測值
開機運行DAOXIAN FUHE程序。首先,輸入邊長數量BIANSHU=4,輸入起始點B 的坐標(5 534.570 m,4 252.460 m)和 終 點C 的 坐 標(5 204.380 m,4 543.750 m)。接著輸入起始邊AB 的已知坐標方位角α°=237°55'20″,輸入終邊CD的已知坐標方位角αn=138°27'08″,再輸入轉角符號JIAODU FUHAO(ZUO:1,YOU:-1)=1。其次,依次輸入五個水平角度JIAODU=173°25'10″、JIAODU=77°23'20″、JIAODU=158° 10'45″、JIAODU=193° 35'15″、JIAODU=197°58'05″。此時,顯示的角度閉合差JIAODU BIHE CHA=0°0'47″,然后,從第1 條邊開始,依次輸入四條邊的水平距離JULI=160.590 m,JULI=171.860 m,JULI=161.510 m,JULI=148.660 m。最后,已知的數據輸入完畢,計算后會顯示出導線全長的相對閉合差K=1:16 884.000,并從2號點開始依次顯示2、3、4、1 各導線點的坐標,即(5 434.254 m,4 127.055 m)、(5 326.746 m,4 261.124 m)、(5 279.796 m,4 415.650 m)、(5 204.380 m,4 543.750 m)。
在進行導線內業計算時,如果使用公式進行手工計算,不僅計算公式多、步驟復雜,且在計算過程中容易出現錯誤。而利用CASIO fx-5800P 編好的程序進行導線計算時,只要根據提示信息輸入已知數據和觀測數據,就可得到導線點的坐標。從上面案例分析可知,通過閉合導線和附合導線兩種導線形式計算得到的角度閉合差、導線全長相對閉合差均滿足《工程測量標準》[4]測量的精度要求。
3 結語
本研究借助CASIO fx-5800P 進行導線測量平差,在采集完施工現場外業數據后,1 名測量員約15 min 就可快速、高效、準確地計算出未知點的坐標和成果精度指標[5],在測量工作中使用CASIO fx-5800P 型計算器既省時又省力,不僅能保證數據的準確性,且能保證精度的可靠性。CASIO fx-5800P型計算器具有較大的內存,且其所采用的程序編寫語言是類結構化的BASIC 語言[6]。這種價格低、體積小、重量輕、便于隨身攜帶的可程序型計算器,使日常測量計算工作實現程序化計算,能在測量計算工作中發揮重要作用,使工作效率進一步提高,本研究的計算方法對廣大測量人員是有益的。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
人大建設(2019年12期)2019-05-21 02:55:44
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
環球時報(2017-03-30)2017-03-30 06:44:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國衛生(2015年3期)2015-11-19 02:53:32
