輪邊驅動電機對電動汽車振動影響的分析與優化
2023-03-27 08:45:35高雄
時代汽車 2023年5期
高雄







摘 要:本文采用頻域分析方法,通過振動響應量的頻率響應特性和統計特性表示。以B級路面和輪邊電機作為雙激勵源,基于1/4汽車2自由度系統建立輪邊電機驅動電動汽車的振動模型,仿真分析輪邊驅動電機對電動汽車振動性能的影響。結果表明,相比非簧載質量的變化,車速的變化對電動汽車的振動影響較大。基于此提出了一種由輪內主動減振的電機充當吸振器的新型輪轂電機結構并進行了優化。
關鍵詞:輪邊電機 振動性能 非簧載質量 1/4汽車模型
Abstract:This paper adopts the frequency domain analysis method, which is expressed by the frequency response characteristics and statistical characteristics of vibration response quantities. Taking Class B road surface and wheel side motor as the dual excitation source, the vibration model of wheel side motor driving electric vehicle is established based on the 1/4 automobile 2 degree of freedom system, and the influence of wheel side drive motor on the vibration performance of electric vehicle is simulated and analyzed. The results show that compared with the change of unsprang mass, the change of vehicle speed has a greater impact on the vibration of electric vehicles. Based on this, a new in-wheel motor structure in which the motor with active vibration damping in the wheel acts as the shock absorber is proposed and optimized.
Key words:rim motor, vibration performance, unsprang mass, 1/4 car model
1 引言
輪邊電機驅動電動汽車作為電動汽車的一種布置形式,由于驅動電機嵌入在車輛輪轂內,導致車輛非簧載質量的變化。驅動電機質量及車速產生的激勵直接通過輪轂對車輛振動性能產生影響,
針對這一影響,國內外學者進行了大量研究。文獻[1]指出,由于輪邊電機的引入,導致了輪胎的動載荷和車身的振動加速度均方值都明顯增大;文獻[2]認為非簧載質量增加,使得車輪動載荷也相應增大,車輛的平順性、友好性明顯變差;文獻[3]認為輪邊電機嵌入在輪轂上,對整車的垂向振動產生負效應,并指出路況越差對車輛的平順性影響越明顯。
廣大學者對如何優化輪邊電機嵌入輪轂引起的平順性不足問題也進行了研究。文獻[3]基于車輛動力吸振器的數學模型,針對非簧載質量增大引起的垂向振動負效應問題進行了優化設計。但該文獻沒有說明非簧載質量的增大是如何影響整車的垂向振動性能。文獻[2]以非簧載質量的垂向振動量為優化目標,對動力減振機構的彈簧剛度和阻尼參數進行優化,該方法并沒有考慮車輪空間對輪邊電機相對位移的限制。文獻[4]通過在輪邊電機與車輪之間增加彈簧和阻尼器來提高電動汽車平順性設想,并對設定的減振系統參數進行仿真對比分析,由于該優化的參數選擇僅局限于一組已知數據。其優化結果不具有代表性。
針對上述研究存在的不足,本文基于1/4汽車2自由度系統建立輪邊電機驅動電動汽車的振動模型,提出一種新型的吸振器結構,采用改進遺傳算法進行優化,為輪邊電機驅動電動汽車平順性的優化提供一定的參考借鑒。
2 輪邊電機驅動電動汽車平順性
2.1 振動模型
為研究輪邊電機驅動電動車的平順性,本文采用如圖1所示的振動模型。
評價指標采用車身垂向加速度、懸架動撓度和車輪相對動載荷作為評價指標[4],研究非對輪轂電機驅動電動汽車振動性能的影響。
基于該力學模型,1/4汽車兩自由度振動模型的運動微分方程如下。
式中,m1為非簧載質量;m2為簧載質量;k為懸架剛度;kt為輪胎垂向剛度;c為懸架阻尼;q為路面不平度;z1、z2分別為車輪和車身的垂向位移。
2.2 振動性能及仿真分析
本文研究的基準車型的驅動電機質量為30kg,并以簧載質量在基準車型的基礎上增減30kg作為研究對象車型,具體如表1所示的四組參數,分別代表了基準型(Conv-EV)、簧載質量減小型(IWD-1)、簧載質量不變型(IWD-2)、簧載質量增加型(IWD-3)四種。
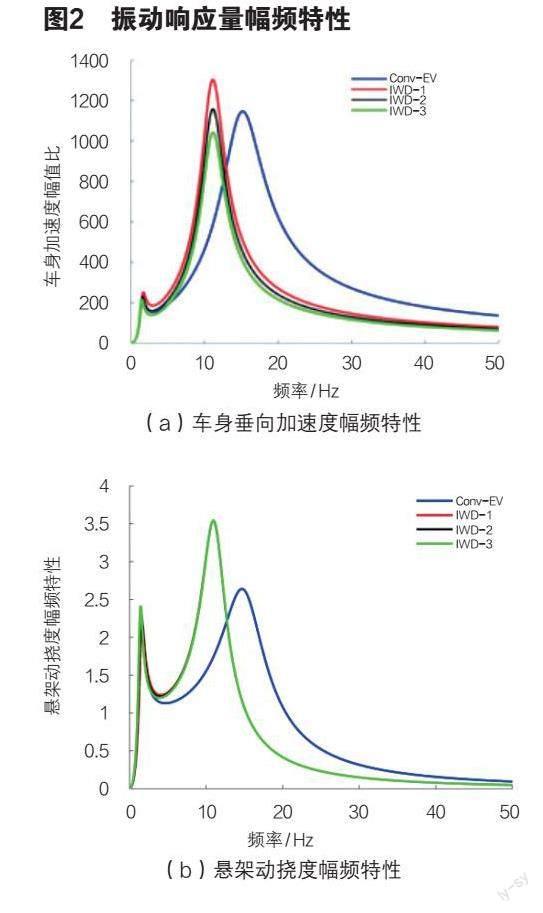
本文以B級路面并選擇城市工況的60km/h作為仿真車速,在Matlab軟件環境下進行仿真[4],結果如圖2所示。
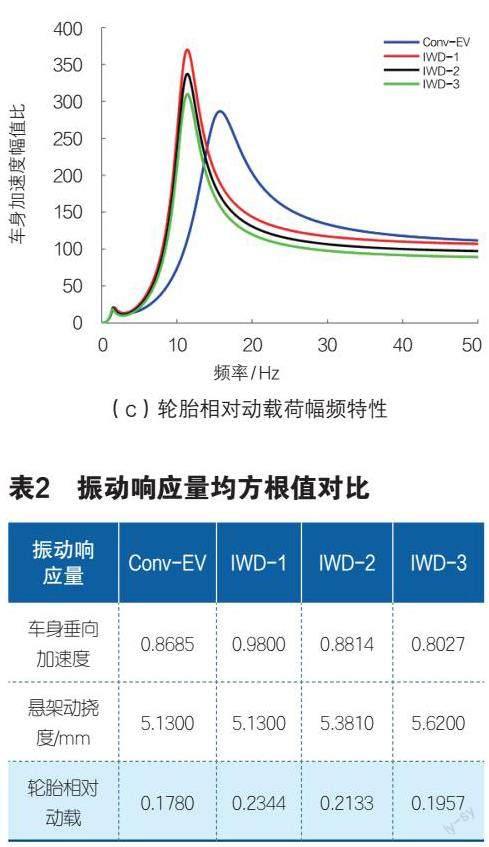
振動響應量的均方根值仿真結果如表2所示。
從圖2可知,非簧載質量增加導致車身加速度、懸架動撓度以及輪胎相對動載的峰值頻率向低頻移動,且IWD-1、IWD-2、IWD-3的車身垂向加速度幅頻特性峰值依次降低;懸架動撓度幅頻特性峰值基本不變;輪胎相對動載幅頻特性峰值與車身加速度幅頻特性峰值相似。
由表2可知,輪邊驅動電機對車身垂向加速度、懸架動撓度、輪胎相對動載荷產生影響,IWD-3與Conv-EV相比,車身垂向加速度反而降低,說明簧載質量的增加對垂向振動有直接影響;IWD-1型對車身垂向加速度、輪胎相對動載的影響程度較IWD-2、IWD-3更為明顯。
3 新型輪邊電機驅動電動車平順性
3.1 動態吸振器型的輪轂電機振動模型
基于上述的分析,為改善非簧載質量增加、簧載質量減小型輪轂電機驅動電動車的整車平順性,本文引入了一種電機充當吸振器的新型結構的輪轂電機結構系統,該系統由上彈簧、上阻尼、驅動電機、下彈簧、下阻尼構成,其結構以及振動模型如圖3、圖4所示。
圖中,ma為電機質量;kau、kad為動態吸振器系統剛度;cau、cad為動態吸振器系統阻尼;z3為電機的垂向位移。
3.2 仿真分析與結果
根據圖3建立的振動模型,對表3三種輪轂電機驅動電動汽車平順性進行仿真,仿真結果如圖4所示。
由表4的振動響應量均方根值仿真結果可得,采用新型動態吸振器的輪轂電機驅動電動車懸架動撓度均方根值較IWD-1型、Conv-EV型都下降了17.6%;輪胎相對動載荷較IWD-1型、Conv-EV型分別下降了33%和11%;車身垂向加速度均方根值較IWD-1型下降了7%,但與Conv-EV型相比仍高出5%,說明車身垂向振動效應并沒有因為引入新型動態吸振結構而得到有效改善。
4 新型輪邊電機驅動電動車平順性優化
4.1 參數影響分析
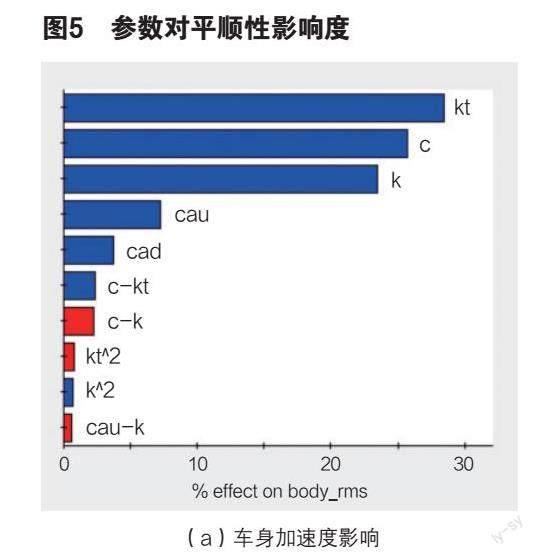
為進一步對新型動態吸振型結構的參數進行優化,采用拉丁超立方的方法對設計參數進行DOE分析,具體如圖5所示。
4.2 優化結果與分析
基于圖5的結果分析,選擇車身加速度、懸架動撓度和輪胎相對動載荷均方根值作為目標函數,以Conv-EV的相應均方根值作為約束函數的上限,在未考慮懸架偏頻的條件下,采用改進遺傳算法進行多目標優化,優化后的參數取值如表5所示。
基于表5的參數,在Matlab軟件環境下進行仿真,均方根值如表6所示:
從表6得知,優化后的IWD車身垂向加速度、懸架動撓度、輪胎相對動載荷均方根值較Conv-EV分別下降了2%、16%、18%;較優化前都下降了7%;懸架動撓度雖有2.1%的增加,但其約束函數的上限是基于Conv-EV型的參數為基準。因此優化后的IWD整車平順性顯的更優。
5 結語
(1)提出了將電機作為動態吸振器的一種新型輪轂電機減振系統,用來解決輪轂電機增加了非簧載質量對整車平順性造成的負效應問題。
(2)采用改進遺傳算法進行多目標優化,優化后的輪轂電機驅動系統,能夠有效的降低輪轂電機驅動電動車的車身垂向加速度、懸架動撓度及車輪相對動載荷。
注:國家自然科學基金國際(地區)合作與交流重點項目(61520106008)和中國汽車產業創新發展聯合基金重點項目(U1564213)資助。
參考文獻:
[1]Purdy JD. A brief investigation into the affection suspension motions of high unsprung mass[J].Journal of battlefield technology,2004,7(1):15-20.
[2]LiQiang Jin,Yue Liu,Jian Hua Li. LQR Control Strategy for Enhancing Ride and Safety Performance of Electric Vehicle Driven by In-Wheel Motors[J].The Open Mechanical Engineering Journal,2015,9,293-301.
[3]夏存良,寧國寶.輪邊驅動電動車大質量電動輪垂向振動負效應主動控制[J].中國工程機械學報,2006,4(1):31-34,42.
[4]趙艷娥,張建武,韓旭.輪轂電機獨立驅動電動汽車動力減振機構設計與研究[J].機械科學與技術,2008,27(3):395-398,404.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
房地產導刊(2022年5期)2022-06-01 06:20:14
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
天天愛科學(2020年6期)2020-09-10 07:22:44
中國生殖健康(2019年2期)2019-08-23 08:12:08
數學物理學報(2017年6期)2018-01-22 02:26:40