全視野消毒機器人的研究與設計
2023-03-28 06:35:01韓志紅
發明與創新·中學生 2023年4期
關鍵詞:單片機
韓志紅

醫院在對流行傳染疾病的病人進行隔離治療后,需要人工對隔離病房進行消毒處理,稍有不慎就會造成病毒的二次傳播。我制作了一款全視野消毒機器人,以期代替人工進入隔離環境中開展消毒工作,降低病毒二次傳播的風險。
一、設計方案與原理
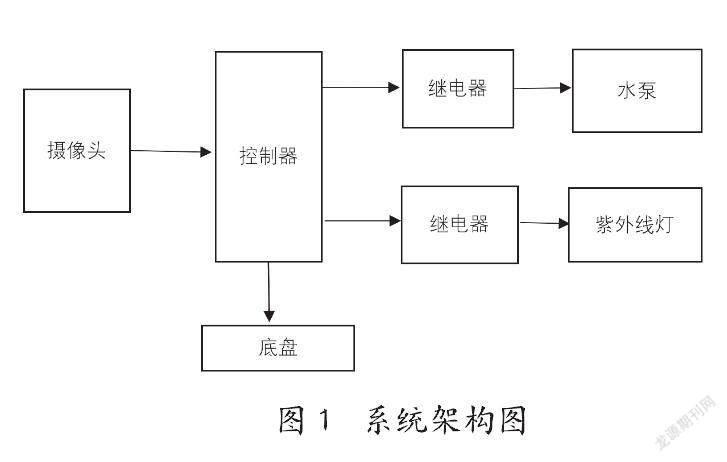
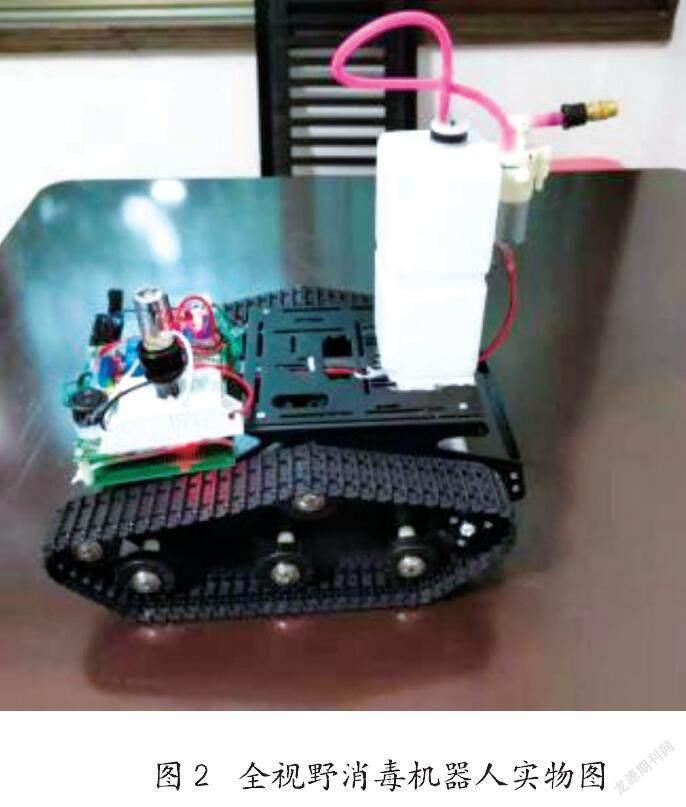
采用履帶式底盤驅動機器人移動,通過STM32系列單片機實現對機器人的控制。該機器人具備視頻回傳、遠程遙控的功能,安裝的紫外線消毒燈能釋放紫外線和臭氧對環境進行物理消殺,水泵抽取消毒液對環境進行化學消殺。
系統通過無線攝像頭將視頻畫面傳至手機,通過手機將操作指令發至攝像頭,攝像頭通過串口將數據輸出到單片機,單片機解析并得到遙控指令,控制機器人移動、噴射消毒水,開啟或關閉紫外線燈。水泵和紫外線燈的驅動系統通過繼電器控制,底盤和單片機之間通過L298電機驅動實現電機的運轉,從而帶動履帶轉動,實現機器人底盤運動。
二、制作過程
(一)硬件焊接
1.分別將DC插座、鈕子開關、繼電器、穩壓模塊在印制電路板(PCB)的正面進行焊接排針。
2.焊接STM32主板界面排針(主板正面為絲印層,將排針焊接在絲印層的背面)。
3.將兩個繼電器焊接在一起,注意正負極對應的焊盤位置。
4.用膠槍將電機驅動模塊固定在對應位置。
5.連接水管與水壺。
6.組裝驅動機器人移動的履帶式底盤。
(二)接線通電
1.從穩壓模塊板上的輸入端取電,另外一端接輸出VCC與GND,連接繼電器通電。
2.將紫外線消毒燈一端與GND連接,另一端與繼電器連接。
3.將水泵固定在履帶式底盤。
4.將電機驅動模塊連接電路板12 V
GND通電(注意:電機驅動模塊的GND要與主控同時供電)。
三、實用參數
全視野消毒機器人的系統指標參數如表1。
全視野消毒機器人具有較好的操控性和先進性,該設備外觀采用履帶車樣式,搭載的攝像頭可將視頻畫面傳至手機App,消殺范圍廣,能有效對高危場所開展靈活、精準的消殺。該設備還可利用紫外線和臭氧定時、定點消殺,具備多種滅菌的功能。
科技創新活動中較多的項目作品都會用到人工智能技術,本作品旨在用計算機模擬思維,復制思維產生智慧行為。
高科技的應用對當代高中生開展科技創新有著正能量影響,它能激發學生熱愛科技、勇于創造的興趣,提升學生學習科學的動力。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36