水收集系統排水管網檢測排查問題及對策
2023-04-04 12:40:24萬佳明
建材與裝飾 2023年11期
萬佳明
(長沙市規劃勘測設計研究院,湖南 長沙 410000)
0 引言
城市排水系統是城市市政系統的重要組成部分。但是,隨著管道壽命的增加,管道老化和外部因素干擾的加劇,一些城市的管道出現了各種問題。這時就需要采用科學的檢測技術,通過對管線的各種缺陷進行判斷,并對其進行正確的處理,以確保管網的正常使用。
1 管道CCTV檢測技術系統現狀
CCTV檢測技術是一種管道閉路電視的內窺鏡技術,它采用閉路電視的方式,利用攝像機進入排水管,把視頻資料傳送到控制計算機,然后進行數據分析。CCTV是管線閉路電視監控系統中使用時間最長、使用最廣泛的一種技術。采用CCTV監控技術,可以實現對地下管線的監測和實時監測,能夠有效及時發現管路發生的故障。管道故障如圖1至圖3所示。

圖1 管道破裂
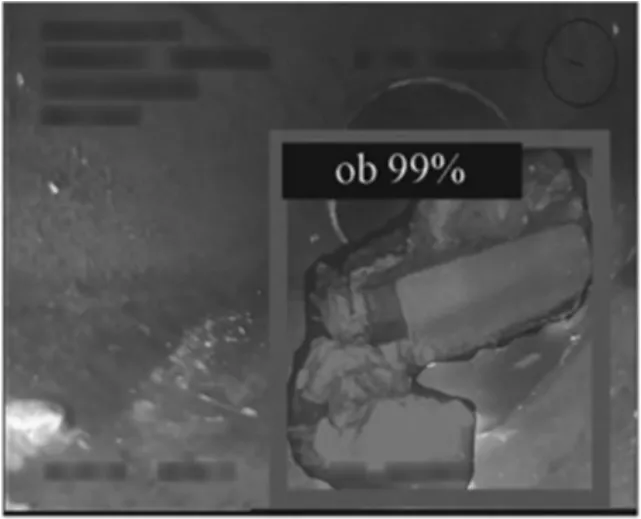
圖3 管道障礙物
從管道的視頻采集到最終的管線檢測報告,是一項非常煩瑣復雜的工作。其影響因素主要有人工判斷類型、人工評估等級等。并且它的工作主要形式有視頻數據導入、視頻播放預覽、添加檢測信息、截取管道缺陷圖像、添加管道缺陷說明等。它的缺點是自動化程度不高,人工效率低。尤其是管線缺陷的判斷,耗費了大量的人力和財力,從而影響了工程的進度。因此,針對CCTV管線缺陷技術的研究重點是對管線缺陷進行智能化、自動化識別的功能升級。圖4為CCTV視頻管道缺陷檢測模式[1]。
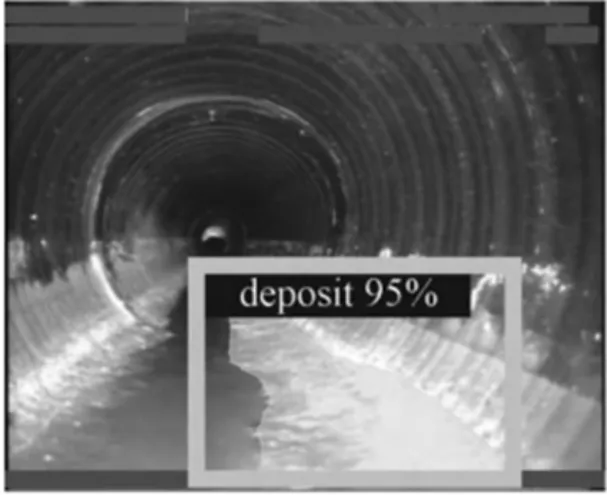
圖2 管道沉積

圖4 CCTV視頻管道缺陷檢測模式
目前,管道CCTV故障的智能檢測技術已由單一的檢測方式逐漸發展為多重檢測并存的工作形式,并將深度學習技術等先進應用引入管道故障診斷中,已有了一定的研究基礎和成果,并在市政工程中得到了初步的應用,但還處在初步的探索和研究階段,還沒有完全實現管道故障的自動提取,目前還需要結合人工的主觀判斷才能實現故障檢測,所以其技術還需要進一步的研究和發展。
2 城市管道CCTV視頻檢測方法
2.1 基于人工識別的檢測方法
傳統的基于人工視覺的CCTV技術在城市管線中的應用最為廣泛。然而,隨著管線的自然老化,長時間運行造成的自然磨損、人為損壞、監測設備老化等問題的出現,造成了城市CCTV的視頻質量不能得到保障。并且隨著測量工作的增加,對測量精度的要求也越來越高,導致城市管線的人工識別已經不能滿足對管線的檢測需求。裂紋和其他缺陷相比,都是微不足道的,用肉眼觀察很可能會忽略,而高強度的工作也會造成工人的疲勞,從而增加漏檢的可能性。此外,人工辨識主要依靠經驗,且具有較強的主觀性,不同技術人員的判斷結果會有差異,從而影響到判斷的一致性,從而導致錯誤的發生。因此,傳統的人工篩選方法效率低下,必將逐漸被智能化的檢測技術所代替[2]。
2.2 基于傳統機器學習的檢測方法
在現有的基于機器學習的管線缺陷識別技術中,常用的有支持向量機、BP神經網絡、隨機森林等。支持向量機可以通過結合紋理特征進行圖像的自動分類,具有很好的準確率,可以達到90%以上。但是,基于對偶優化問題引入核函數,支撐向量機的選取與參數的調整密切相關。因而,不宜用于連續探測管線;BP神經網絡可以以任何精度近似任何非線性函數,達到92%的準確率。隨機森林算法通過對已標注的圖像進行訓練,能夠較好地區分出有問題的和沒有問題的圖像,其準確率可達88%。但是,由于隨機森林法對識別結果的影響,不能通過訓練得到,必須手工進行調整,從而不能對缺陷進行自動分類。由于管道的缺陷類型很多,單一的方法很難對各種類型的缺陷進行有效的識別,而且由于管線的內部環境比較復雜,因此常規的檢測方法在精度上受到了一定的限制。因此,對高精度、自動化和智能化的識別技術成為亟待解決的問題[3]。
3 管道CCTV視頻智能檢測面臨的問題
3.1 樣本數量不足
深度學習是一種典型的學習方法,它可以通過大量的樣本來獲得對象的特性,以達到與人相似甚至超過人的程度。然而,在實際的管線缺陷抽樣中,尚無正規的管線缺陷資料。而在一般情況下,如破裂、變形、障礙物等故障問題,都可以得到較多的樣品,而異物穿透故障問題,則很難采集到管線中的缺陷樣品,因而不能滿足動輒幾萬、幾十萬甚至上百萬的深度學習模型,對模型的結構和性能都有很高的要求。由于管線的內部環境比較復雜,圖像質量難以保證,嚴重影響了管線的識別,降低了智能識別的精度。
3.2 無法實現管道缺陷自動定級
管線的缺陷主要有兩類:功能缺陷和結構缺陷,細分為16個小類。并按其不良程度進行分級。結構檢查中的缺陷主要有四級變形、四級脫節、四級滲漏、四級斷裂、四級斷裂、三級腐蝕、支管暗接、三級異物穿入、三級錯口、三級接口材料脫落。功能上的缺陷主要有四級障礙、四級結垢、四級沉積、四級殘墻、四級樹根、四級樹根、三級浮渣。目前,智能檢測技術大多采用Faster-RCNN等對象探測技術來進行管線缺陷的識別和探測,從而有效地解決了多個缺陷的發生。但是,目前的檢測技術很難對所有的缺陷進行準確的識別,而且不能對其進行準確的分級,從而使其不能進行定量的檢測。對缺陷進行準確的分類和分級,是進行缺陷修復工程、估算缺陷處理費用的關鍵。現有的智能技術不僅不能準確地辨識出所有的缺陷,而且很難對其進行分類和定級,從而使其在工程中的應用產生了很大的困難和不便。
3.3 場景坐標無法有效轉換
實時實現視頻空間坐標和實際空間坐標的轉換是故障檢測和排除的關鍵。利用GPS定位信息中的故障信息進行定位,同時對電子地圖進行多種標識分類,可以清楚地反映城市地下管線的健康狀況及缺陷的分布。為快速確定缺陷部位、及時進行規劃和實施工作提供了依據,建立了實時的影像-場景坐標變換系統是必要的。目前的智能管線缺陷檢測技術雖然能夠對視頻進行識別,但是CCTV攝像機只能在視頻中統一的呈現出實時的視頻信息,具體坐標不能從后臺獲得,因此要從視頻中提取坐標、距離等信息并進行轉換,這就增加了實時的視頻坐標和空間坐標變換的困難,很難將圖像中的內容與實際情況進行有效的融合。
4 管道CCTV視頻智能檢測技術改進措施
4.1 小樣本深度學習模型的應用,以提升識別精度
隨著管線缺陷智能化的研究,管線缺陷數據的收集會越來越豐富,而且在數量和質量上都會得到提高。同時,由于當前深度學習技術的海量樣本頗豐,因此如何降低其對樣本的依賴性也是今后的一個重要課題。當前,深度學習正逐步向降低樣本依賴性方向發展,其方法是:模擬訓練樣本,增加數據集,運用先驗知識,提高學習能力,以最大限度地降低樣本數對模型的影響,加快模型的收斂,提高模型的推廣精度,使其達到半監督學習、無監督學習、小樣本學習乃至零樣本學習的目標。針對管線缺陷質量不能保證、數量極度缺乏的現狀,采用小樣本學習技術為管線缺陷的智能識別提供了新的思路和機會[4]。
4.2 運用語義分割深度學習模型,以實現管道缺
卷積神經網絡是一種用于圖像分類和回歸的智能方法。全卷積神經網絡(FCN)采用上取樣層取代卷積神經網絡的全連通層,從而達到對物體的象素級分割,并在醫學圖像分割、道路場景語義分割、環境感知等方面進行了大量的研究。利用語義分割技術對管線進行分類,可以有效地識別出各種缺陷,標注出缺陷的區域,并對其進行劃分,并利用劃分面積進行精確劃分,從而有效地解決了實際情況下的病害映射問題。圖5為卷積神經網絡。
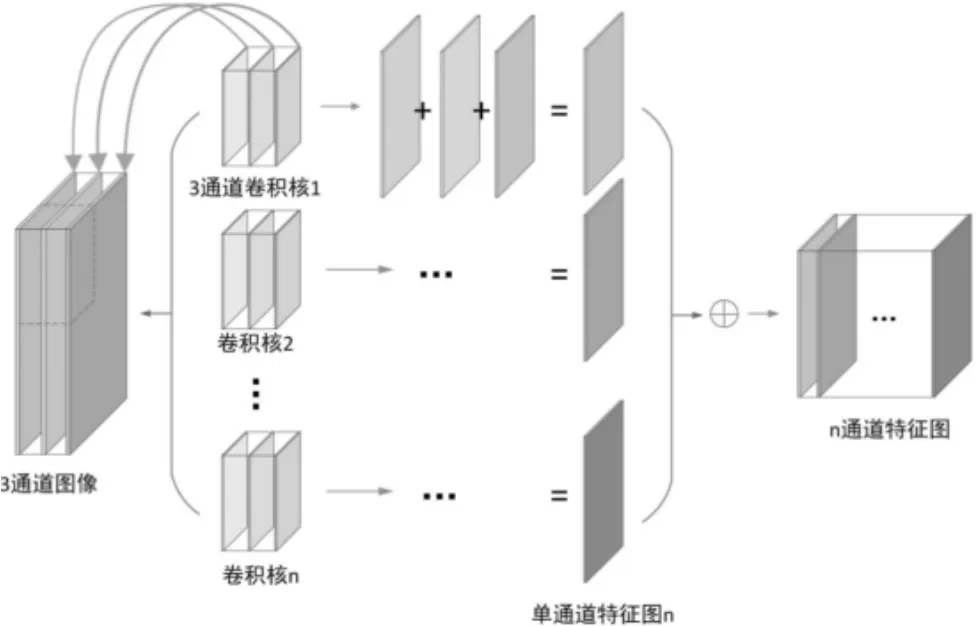
圖5 卷積神經網絡
4.3 坐標轉換問題的解決,以實現缺陷尺寸大小的自動估算
即時定位與地圖構建(simultaneouslocalizationand mapping,SLAM)首先被用于機器人,它的目的是利用傳感器的信息來實現對周圍環境的實時繪制,并通過對其進行預測。該系統采用了全景攝像機,并將激光雷達和SLAM技術相結合,實現了管道的三維立體成像,如圖6所示。通過將影像和GIS技術相結合,可以實現實時的視頻坐標和實際的空間坐標變換,便于工作人員根據缺陷的空間信息,及時確定管道缺陷所在的位置,并對管道缺陷進行精確測量,并依據缺陷類型、等級等信息,及時制訂出相應的解決措施,為后續的管道修復過程設計和造價計算提供了可靠的依據。

圖6 激光SLAM的地圖構建
4.4 建立軟-硬件一體化系統,以實現管道缺陷識別的自動化流程
隨著城市管線缺陷識別的自動化和智能化進程的不斷加快,今后的軟硬件集成是必然的。采用軟硬件集成的方法,可以根據現場采集的資料自動識別病害類型,判斷病害等級,自動分析和提取管線缺陷,為管線缺陷增加詳細的說明,并將其標記為電子地圖,并可通過電子地圖查看管線的總體健康情況與檢測點的影像,并根據以上的智能提取信息,形成一套固定的規范格式的管線缺陷報表,實現一圖整體統一管理[5]。
5 結語
綜上所述,對管道進行質量檢查和故障排查,可以為管道的維修和恢復提供準確的科學依據。文章就排水管網的檢查和分析技術問題進行了較為詳盡的論述,以期達到對管道故障進行智能檢測,提升CCTV監測技術的應用和推廣,降低人工投入,提高檢測的效率和準確度。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
