星間激光通信機光軸指向誤差源分析與補償控制
2023-04-15 13:04:42劉政麟汪逸群
宇航學報 2023年3期
關鍵詞:方向
劉政麟,汪逸群
(之江實驗室,杭州 311121)
0 引 言
通信衛星是構建天地一體化全球通信網絡的重要載體,星間激光通信技術是現代衛星通信網絡的重要組成部分[1]。相比作為傳統通信載體的微波,激光的波長更短、相干性更好,使衛星激光通信具有通信容量大、精度高、重量輕、功耗低、體積小等優點,可以實現更大容量、更高速率的信息傳輸[2-6]。星間激光通信機是搭載在衛星上的小型化激光通信終端,用于實現星間激光通信鏈路的建立和數據通信。隨著國際航空航天技術的發展和對新一代通信技術的要求,美、歐、日等發達國家已進行了諸多衛星激光通信技術的研究與試驗[7-12],我國也從20世紀90年代開始加快了對衛星激光通信技術的研究步伐[6,13-15]。
高精度的光軸指向與跟瞄系統,是星間激光通信鏈路建立和正常工作的關鍵,對空間光通信光軸誤差的研究一直是相關研究領域內的重點[16-21]。影響鏈路建立的誤差主要為衛星姿態誤差和通信機光軸指向誤差。較大的誤差會使激光通信機無法準確地捕獲和跟蹤目標,無法建立穩定的星間通信鏈路,導致通信的不穩定,甚至中斷。衛星姿態誤差需要根據星地標校進行修正,而通信機光軸指向誤差可以在地面根據測試結果提前完成補償。需要對激光通信機光學系統的誤差源進行分析,并設計補償方案來降低光學誤差對光軸指向精度的影響。
本文主要對一集約化設計的星間激光通信機光學系統進行了詳盡的誤差源分析,并提出基于粗跟蹤校正、精跟蹤校正的綜合補償方案來修正后光路誤差對指向精度的干擾。結果表明,補償后的相機處光斑位置偏差有了顯著減小,可以滿足建立穩定星間激光通信鏈路的要求。
1 激光通信機光學系統的誤差模型
1.1 激光通信機的結構設計及誤差角定義
本文中的星間激光通信機光學系統采用了基于二維擺鏡的掃描裝置、跟瞄機構和通信機構共用光電探測器的集約化設計,具體結構如圖1所示。外來入射光線經二維擺鏡反射后照射到主鏡上。主鏡與次鏡為具有不同曲率半徑的一組離軸雙反射鏡,組成一個望遠鏡系統。之后,光依次經精跟蹤振鏡、折轉鏡、分鏡反射,入射到由4個具有不同焦距的厚透鏡組成的透鏡組上。出射光再經平面反射鏡反射,入射到精跟蹤相機上,完成外來光在相機上的成像。通信接收路、通信發射路的終點位于精跟蹤相機路關于分鏡、分色鏡的共軛點處,因此,實現對精跟蹤相機路光斑位置誤差的控制,就能保障通信接收路和通信發射路的精度要求。
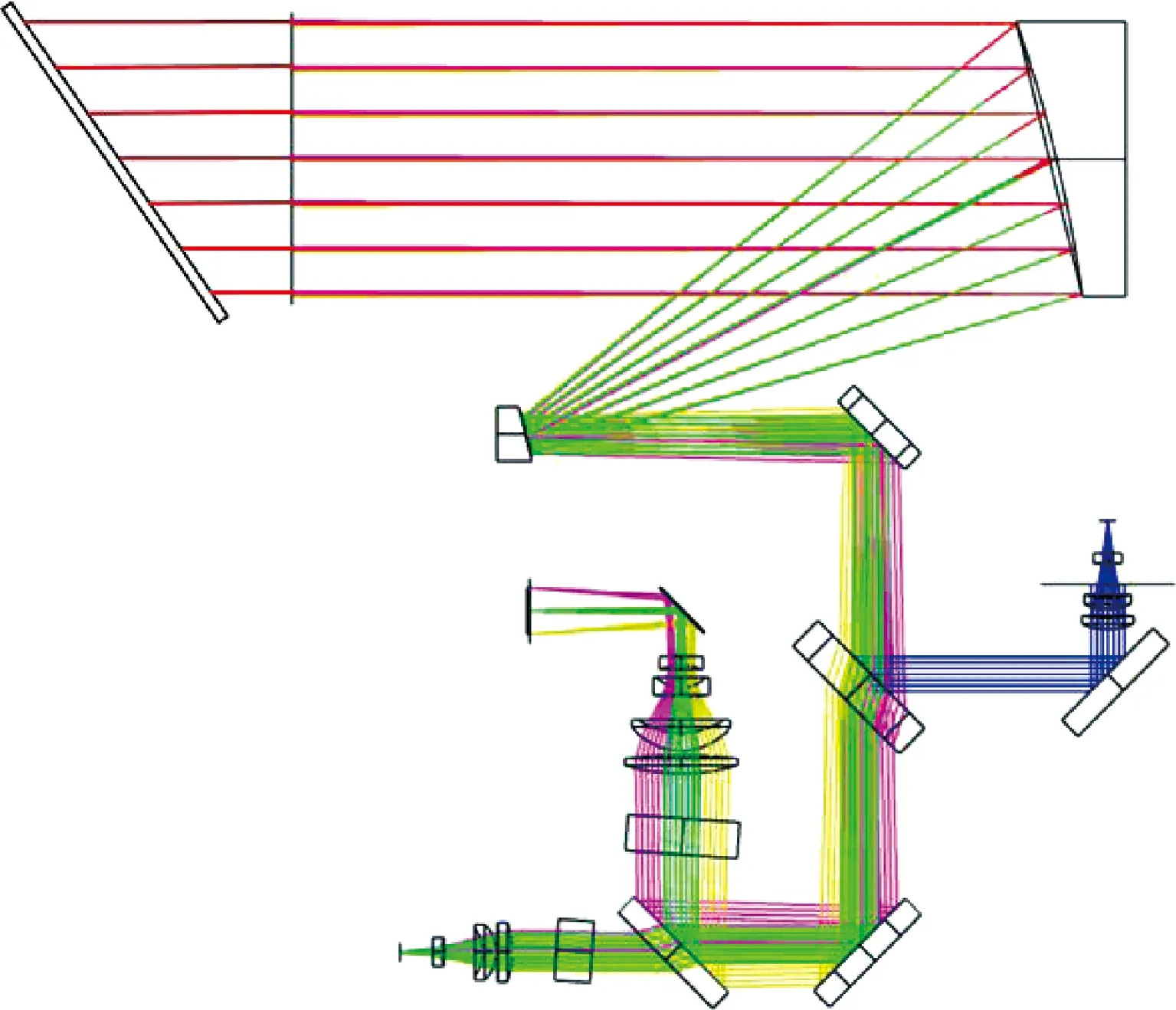
圖1 激光通信機光學系統的整體結構Fig.1 Optical system structure of the laser communicator
對精跟蹤相機路建立數學模型,首先需要構建坐標系。將通信機光學系統的基準坐標系稱為終端坐標系,其z軸正方向從主鏡指向二維擺鏡;x軸正方向從精跟蹤振鏡指向折轉鏡;y軸與x軸和z軸共同構成右手系,正方向垂直紙面向外。各個元件的誤差也基于與終端坐標系的偏差來確定,z′軸與z軸正方向的夾角定義為俯仰誤差角φi0,z′軸在x-y平面內的投影與x軸的夾角定義為方位誤差角ψi0,i為精跟蹤相機路元件從外到內的編號。對于二維擺鏡額外存在一個軸系正交誤差,為俯仰軸與x-y平面的夾角,如圖2中角θs所示。

圖2 元件誤差角的定義Fig.2 Definition of the component error angle
1.2 精跟蹤相機路中各元件的作用矩陣
精跟蹤相機路中,對外來光線方向矢量有影響的元件依次有二維擺鏡、主鏡、次鏡、精跟蹤振鏡、折轉鏡、分鏡、透鏡組、相機前反射鏡,最終將光入射到精跟蹤相機處。需要計算路徑中每個元件對光的作用矩陣,從而得到相機處光斑的位置與各元件誤差的關系。
二維擺鏡是一個可調元件,具有俯仰角和方位角兩個旋轉維度。設入射光單位矢量為r0,目標出射光單位矢量為r′1=[0, 0, -1]T,則二維擺鏡目標法線方向為
(1)
式中:fI(r)表示與矢量r同向的單位矢量。將F′1m轉換至球坐標系,得到二維擺鏡目標法線方向對應的俯仰角φ′1和方位角ψ′1。設擺鏡的初始法線方向俯仰角為π,方位角為0,指向z軸負方向,則二維擺鏡需要轉動的角度為
φ1=φ′1-π;ψ1=ψ′1
(2)
對實際元件進行轉動,采用在三維空間中繞某個軸轉動一定角度的方法。考慮在三維空間直角坐標系中某點繞任意軸的轉動,其轉動函數的矩陣表示為
(3)
式中:nx=-sinψcosθ,ny=cosψcosθ,nz=sinθ分別為旋轉軸單位方向矢量在x,y,z方向上的分量;φ為某點繞轉軸轉過的角度;ψ為轉動方向對應的方位角;θ為轉軸與x-y平面的夾角。
二維擺鏡存在角度失調誤差φ10,ψ10,轉軸失調誤差φ1a,ψ1a和軸系正交誤差θ1p,如圖3所示。根據式(3),轉動后的二維擺鏡實際法線方向矢量為
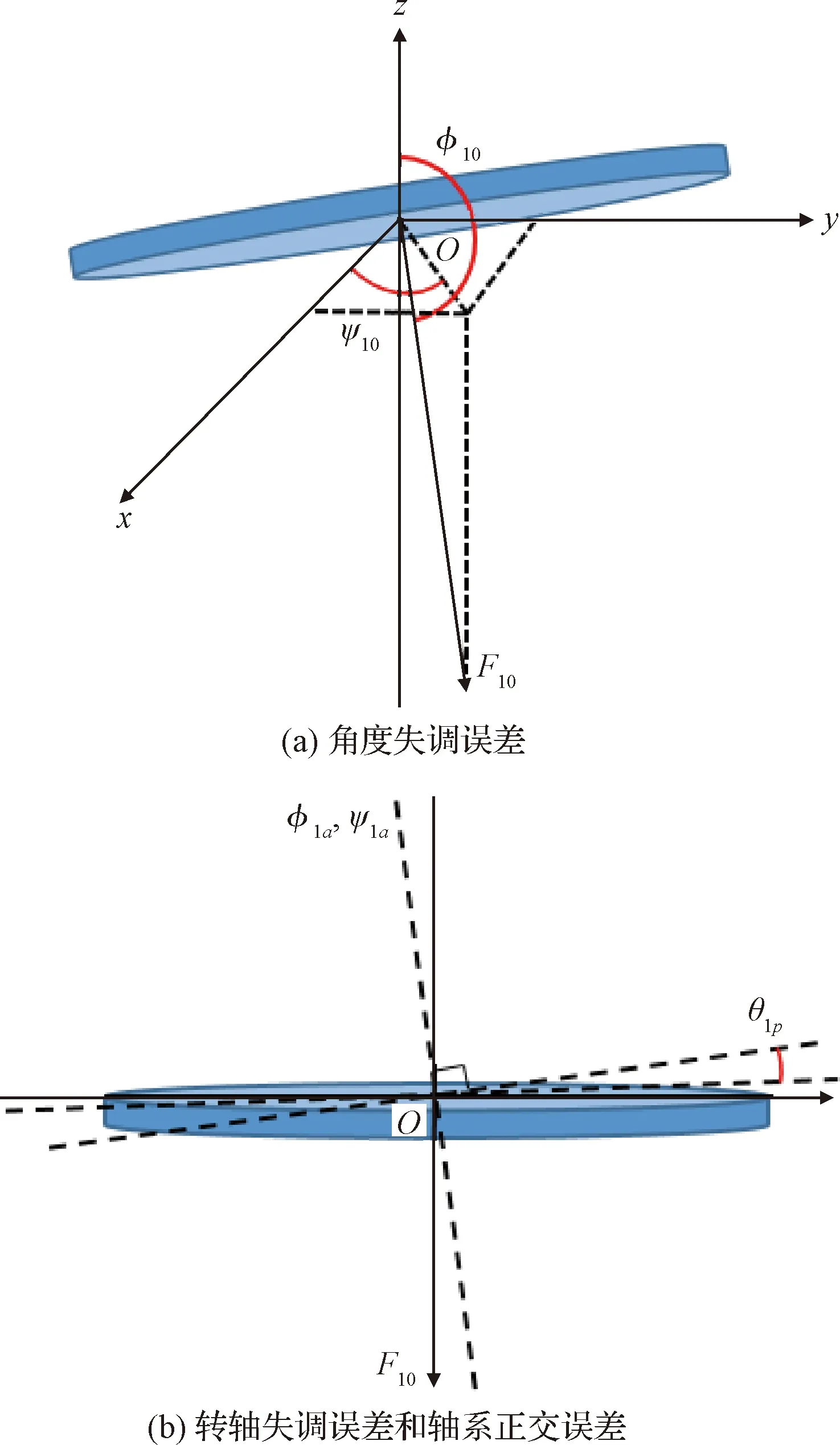
圖3 二維擺鏡存在的誤差。Fig.3 Errors of two-dimension waving mirror
F1=Tr(φ1a,ψ1a, 0)Tr(φ1,ψ1,θ1p)Rz(ψ1)·
(4)
式中:Rz(ψ)表示繞z軸轉動ψ角的矩陣。
根據反射矩陣,可以得到轉動后的二維擺鏡的矩陣描述
(5)
主鏡和次鏡為一對離軸球面反射鏡,共同構成了一個望遠鏡系統。由于在安裝過程中,主鏡和次鏡是先獨立安裝成望遠鏡系統后再安裝進光學系統,因此,為了計算方便又不失一定的準確性,將兩個離軸球面鏡組成的望遠鏡系統進行整體考慮和分析,忽略望遠鏡系統的內部誤差,只考慮整體誤差。對于圖1中的望遠鏡系統,放大倍率為η=1/8,理論入射光線與出射光線保持平行。設望遠鏡系統的俯仰角、方位角誤差分別為φ230,ψ230,則該望遠鏡系統的作用矩陣為:
(6)
精跟蹤振鏡、折轉鏡與分鏡為三個平面反射鏡,其中折轉鏡與分鏡為固定元件,精跟蹤振鏡為可調元件。由于精跟蹤振鏡的轉動幅度很小,轉軸誤差和軸系正交誤差可以忽略不計。因此,三者均只存在一個角度失調誤差。對于具有角度失調誤差φ40,ψ40的精跟蹤振鏡,在終端坐標系中理想法線方向指向z軸正方向偏x軸正方向π/4處,則對入射光線的作用矩陣為
(7)
對于具有角度失調誤差φ50,ψ50的折轉鏡,在終端坐標系中理想法線方向指向z軸正方向偏x軸負方向π/4處,則對入射光線的作用矩陣為
(8)
對于具有角度失調誤差φ60,ψ60的分鏡,在終端坐標系中理想法線方向指向z軸負方向偏x軸負方向π/4處,則對入射光線的作用矩陣為
(9)
根據式(1)至(9),入射光由分鏡出射時的光單位方向矢量為
r6=T6T5T4T23T1r0
(10)
透鏡組由四個厚透鏡組成,各自具有不同的焦距。透鏡組存在的誤差主要為失調誤差,包括透鏡的位置失調誤差和角度失調誤差。傳統計算透鏡組的方法為引入等效焦距,僅將透鏡組看作一個透鏡,無法精確反映因光入射位置或角度偏差導致的出射光矢量變化。為了提高光位置和方向的準確性,創造性地引入矩陣光學方法來描述后光路透鏡組[22]。由于透鏡是中心對稱元件,在分析時分解為互相垂直的兩個方向的分量。在圖1所示的光學系統中,理想情況下光經透鏡組的傳輸方向為x軸負方向,分別研究x-y平面和x-z平面內的透鏡矩陣。對于非傍軸情況,即元件存在一定的失調誤差時,元件矩陣需要拓展成4×4的矩陣。根據矩陣光學的失調理論,一個失調厚透鏡在某個方向上的矩陣表示如下
(11)
(12)
式中:l為透鏡厚度;R1,R2分別為厚透鏡前后面的曲率半徑;n為厚透鏡折射率;ε,ε′分別為失調位置和失調角度。設兩厚透鏡之間的距離為d,視為自由空間,其對應矩陣表示為
(13)
根據式(11)~(13),可以直接把透鏡組用矩陣進行描述。由4個厚透鏡構成的透鏡組光學系統在單方向上的矩陣可表示為透鏡矩陣與自由空間矩陣的連續相乘
MT=Md1011MT10Md910MT9Md89MT8Md78MT7Md67
(14)
在失調系統中,需要對光參數進行擴張以對應4×4的光學矩陣運算。在這里直接給出光經透鏡組的矩陣表達式。在x-y平面和x-z平面內分別有
(15)
入射光的偏移角度可以由分鏡出射光得到
(16)
入射光的偏移位置可以由次鏡后的光線在每段傳輸過程中的位移進行累加得到
(17)
式中:r的下標表示編號對應元件的出射光單位矢量在某個方向的分量;l的下標表示編號對應兩個元件之間的光程。將式(16)~(17)代入式(14)~(15)計算,即可得到透鏡組出射光在x-y平面和x-z平面內的出射位置r10y,r10z和出射角度θ10y,θ10z。
相機前反射鏡為一固定的平面反射鏡,存在角度失調誤差φ110,ψ110。將經透鏡組出射的光線r10轉換回終端直角坐標系中的矢量
(18)
則機前反射鏡對入射光線的作用矩陣為
(19)
與計算透鏡組入射光位置的方法類似,仍通過分段計算累加的方式得到光斑在精跟蹤相機處位置坐標,具體表達式為
(20)
式中:d11c為相機前反射鏡到精跟蹤相機感光平面的距離。這樣,就建立了通信機后光路系統的數學模型,各項誤差可以通過修改對應元件的矩陣來體現。
2 蒙特卡洛方法分析因安裝誤差造成的光軸指向誤差
根據精跟蹤相機路中的元件種類,將系統誤差分為六類,分別為透鏡位置失調誤差Δrlens、二維擺鏡角度失調誤差Δφ10、光學元件角度失調誤差Δφm、二維擺鏡轉軸失調誤差Δφ1a、二維擺鏡軸系正交誤差Δθ1p、二擺鏡轉角誤差Δθ1。為了研究每項誤差對光軸指向精度的影響,分別單獨引入某類隨機誤差值(其他類型誤差不存在),采用蒙特卡洛方法,在MATLAB中計算相機處的光斑位置坐標。每項誤差取值106次,取值方式為最大誤差范圍內的均勻分布,所得統計結果如表1所示。

表1 各類誤差導致的光斑偏移量Table 1 Spot offset caused by various errors
從表1可以看出,在精跟蹤相機路存在的各類誤差中,光學元件角度失調誤差Δφm、二維擺鏡轉軸失調誤差Δφ1a、透鏡位置失調誤差Δrlens對光斑位置的影響較大,而二維擺鏡軸系正交誤差Δθ1p和二維擺鏡轉角誤差Δθ1帶來的影響較小。在通信機整機的裝調過程中,需要著重控制對光軸指向影響較大的幾類誤差,防止光斑位置偏差過大。實際后光路系統中各項安裝誤差同時存在,對光軸指向精度影響顯著,需要進行校正,以滿足實際應用的需求。
3 誤差校正矩陣修正安裝誤差
在激光通信機工作時,由于光學系統誤差的存在,光軸指向存在偏差,表現為精跟蹤相機處的光斑不處于相機中心,無法對目標進行準確的瞄準和跟蹤。因此,需要對光學系統中存在的誤差進行補償,盡量減小光學誤差對相機處光斑位置偏移的影響。重新定義相機零點位置,使入射光斑初始位置位于重置后的零位,可以校正安裝誤差造成的誤差初值。在此基礎上,進一步提出誤差校正矩陣方法,用于校正任意方向的安裝誤差。該方法主要分為粗跟蹤誤差校正矩陣和精跟蹤誤差校正矩陣。
3.1 粗跟蹤誤差校正矩陣
理想情況下,入射光經二維擺鏡反射出的光在終端坐標系方向的單位矢量為[0, 0, -1]T。由于二維擺鏡自身存在位置失調誤差φ10,ψ10,轉軸失調誤差φ1a,ψ1a和軸系正交誤差θ1p,實際系統中,二維擺鏡的出射光方向矢量與目標矢量存在一定的偏差。為了確定相機處光斑位置與二維擺鏡反射光方向矢量的關系,構造直接入射到主鏡的光線,其俯仰角為π±15″,方位角為0~2π,則該光線在相機處光斑位置如圖4所示。光斑呈圓環狀分布,光斑位置距原點的距離與構造光線的俯仰角有關,而光斑位置在相機處坐標的方位角與構造光線的方位角有關。光學系統其他元件的固定誤差可以忽略不計。由此可以得到相機處光斑位置與二維擺鏡反射光方向矢量的近似關系

圖4 沿不同方向入射到主鏡的光在相機處的光斑位置Fig.4 Spot position of beams incident on the main mirror in different directions at the camera
(21)
式中:Δφ, Δψ表示二維擺鏡反射光較終端坐標系z軸負方向的俯仰角和方位角誤差;Δx, Δy表示相機處光斑在x和y方向上的坐標;nR為粗跟蹤比例系數,由光學系統構造決定。
粗跟蹤校正過程中,入射光方向單位矢量r0為已知量,根據式(21)計算出的二維擺鏡出射光方向矢量,可以得到二維擺鏡法線的方向矢量為
(22)
對于理想情況,二維擺鏡出射光沿z軸負方向,則此時二維擺鏡法線的方向矢量為
(23)
根據式(22)~(23),將二維擺鏡法線方向單位矢量轉化到球坐標系,可以得到實際法線和理想法線各自的俯仰角和方位角,分別為φ1,ψ1和φ1i,ψ1i,二者的差值為
Δφ1=φ1i-φ1, Δψ1=ψ1i-ψ1
(24)
在裝調完成的確定系統中,式(24)計算得到的二維擺鏡法線方向角差值只與入射光方向單位矢量r0有關,Δφ1和Δψ1即為二維擺鏡的補償轉角。這樣,可以根據r0計算得到二維擺鏡的理想俯仰角φaim1和理想方位角ψaim1。以φaim1和ψaim1為矩陣的行坐標和列坐標,對應角度時的二維擺鏡補償轉角Δφ1和Δψ1為相應矩陣元的值,構建粗跟蹤誤差校正矩陣。在粗指向機構根據入射光方向進行第一次轉動的基礎上,讀取粗跟蹤誤差校正矩陣相應矩陣元,二維擺鏡額外轉動補償轉角,即可達到校正后光路安裝誤差的效果。
3.2 精跟蹤誤差校正矩陣
受限于粗指向機構轉動頻率,粗跟蹤誤差校正矩陣無法精確校正后光路安裝誤差,需要精跟蹤振鏡輔助校正。精跟蹤振鏡具有高精度、高頻率的特點,沿x和y方向的旋轉角分別為φ4x和φ4y。構建精跟蹤誤差校正矩陣的關鍵同樣在于如何計算得到與轉動角度對應的補償轉角。
首先隨機產生了一組固定安裝誤差,用于模擬某確定后光路系統。此時,相機上光斑初始位置處于第二象限。令精跟蹤振鏡的x和y方向轉角在一定范圍內循環變化,可得圖5所示的光斑位置分布,每個點對應一組精跟蹤振鏡轉角。光斑在x軸方向的位置對應精跟蹤振鏡繞y軸的轉動角度,在y軸方向的位置對應精跟蹤振鏡繞x軸的轉動角度。由于精跟蹤振鏡的初始法線位置為z軸正方向偏x軸正方向π/4,因此,對于沿振鏡的x和y方向轉動同樣的角度,相機處光斑在y和x方向的移動距離是不同的,經計算可得

圖5 精跟蹤振鏡轉動不同角度時,相機處的光斑位置Fig.5 Spot position at the camera with different rotation angles of fine tracking galvanometer
(25)
精跟蹤振鏡的轉動角度很小,式(25)可以近似為
(26)

圖5中隨精跟蹤振鏡轉動變化的光斑位置分布近似是一個等間距矩形點陣,很自然可以想到,精跟蹤振鏡的補償角度只與光斑初始偏移位置有關。讀取原點處數據點對應的精跟蹤振鏡沿x,y方向的旋轉角度,就可以得到精跟蹤振鏡所需額外旋轉的補償角。在精跟蹤振鏡轉動角度較小時,給出對應的近似關系
(27)
式中:Δx, Δy表示相機處光斑在x和y方向上的坐標;nF為精跟蹤比例系數,同樣由光學系統構造決定。以質心坐標偏差量Δx和Δy為矩陣的行坐標和列坐標,對應質心坐標時的精跟蹤振鏡轉角φ4x和φ4y為相應矩陣元的值,構建精跟蹤誤差校正矩陣。在激光通信機運行時,根據粗跟蹤校正后的相機處光斑的位置坐標,直接讀取精跟蹤誤差校正矩陣對應矩陣元處的精跟蹤振鏡轉角,即可轉動精跟蹤振鏡,完成對光軸指向誤差的校正。
3.3 誤差校正后的光軸指向精度
下面同樣采用蒙特卡洛方法模擬誤差校正后的光軸指向精度。考慮一個具有隨機誤差的光學系統,各誤差的最大取值與表1中取值相同,入射光俯仰角范圍為60°~120°,方位角范圍為0~2π。由于選擇的誤差范圍較大,相機處的光斑偏離相機中心的距離會較遠。在MATLAB中,每一項誤差在其范圍內取均勻分布的隨機值,則每一組誤差值對應一個相機處的光斑位置。該通信機系統中,相機單像素尺寸為15 μm×15 μm,折合角度偏差為8.5 μrad。取2000組隨機誤差,觀察相機處光斑位置的分布。
圖6(a)展示了不進行任何補償時相機處的光斑位置分布圖。相機處光斑距離相機中心的最大偏移位置接近3 mm,對應角度偏差約1.7 mrad,此時光軸指向誤差極大,無法滿足鏈路建立的需要。
圖6(b)展示了重新定義相機零點位置且粗跟蹤誤差校正矩陣補償后的相機處的光斑位置分布圖。此時,相機處光斑的偏移量顯著減小,距中心最大值約0.08 mm,對應角度偏差約45 μrad,對安裝誤差造成的光軸指向偏差有顯著的校正作用,已經達到對粗跟蹤補償精度的要求。
圖6(c)展示了在6(b)基礎上進一步進行精跟蹤誤差校正矩陣補償后的相機處的光斑位置分布圖。相機處光斑的偏移量進一步減小,基本被限制在了0.0005 mm之內,對應角度偏差約0.3 μrad。這表明經過粗跟蹤和精跟蹤兩級誤差校正矩陣補償后,相機處的光斑位置都會集中于中心像素處。此時的通信機后光路具有極高的光軸精度,可以用于實現星間鏈路的穩定建立,滿足激光通信的要求。

圖6 不同補償且存在隨機誤差時,相機處光斑位置。Fig.6 The spot position distribution at the camera with random errors under different compensation situations
為了更精確地給出綜合補償方案對光軸精度的校正作用,對上述給出的補償情況,分別計算106組隨機誤差值,將對應光點位置誤差數據列入表2中,可以更加直觀地展示綜合補償對相機處光斑位置偏差情況的改善。隨著補償的依次運行,相機處光斑越來越集中于中心,表明光軸的指向精度不斷提高,表明粗跟蹤和精跟蹤誤差校正矩陣能夠有效補償后光路安裝誤差,顯著提高激光通信機光軸指向精度。

表2 不同補償情況下,相機處的光斑在存在隨機誤差時的位置統計Table 2 Statistics of spot position at the camera with random errors under different compensation situations
由于影響粗跟蹤和精跟蹤補償角的因素只有精跟蹤相機路的光學結構以及相機處的光斑位置,該方法適用于任何方向的入射光。太空中衛星存在的抖動,可以等效為入射光方向的抖動,誤差校正矩陣同樣。校正過程中,只需要根據相機處光斑位置讀取補償表,獲得粗跟蹤和精跟蹤的補償轉角,在自身當前轉動位置處疊加額外轉動即可。根據相機上光斑位置的不斷變化進行實時閉環補償,不斷將光斑向相機中心補償,校正光軸指向誤差,保持對目標的高精度瞄準和跟蹤。這一方法大大降低了通信機掃捕跟程序的運算量,節約了運算時間和負載,有利于提高跟蹤響應頻率和速度。
4 粗跟蹤誤差校正矩陣修正安裝誤差實機測試
在實際的激光通信機系統中,粗跟蹤系統由于轉動范圍大,是系統光軸誤差的主要來源。在超凈間中使用項目組設計制造的60 mm激光通信機初樣件進行粗跟蹤誤差校正矩陣修正安裝誤差的實機測試,測試裝置如圖7所示。60 mm激光通信機安裝在二維轉臺上,可以通過轉臺的轉動改變入射光的方向。地檢裝置端設置激光光源,用于入射到激光通信機判斷光軸指向偏差。放置在二維轉臺上的通信機在初始位置接收到的光斑位置設為光斑零點。二維轉臺轉動時,二維擺鏡反向轉動,補償因轉臺轉動導致的光軸偏移,使光軸始終對準光源。由于二維擺鏡存在安裝誤差,相機處光斑質心坐標會產生偏移,圖8展示了轉臺方位角從-50°到+50°、俯仰角從-15°到+15°的范圍內,方位角每間隔10°、俯仰角每間隔5°取一個點,得到的光斑質心坐標偏移的像素值。
整體趨勢上,轉臺轉動角度越大,二維擺鏡對應的轉動角度也要增大,光軸的偏移量就越大。方位角負側偏移量比正側更大,這與具體的光機裝調情況相關。根據每個點處二維擺鏡轉動角度和光斑偏移量,計算得到粗跟蹤誤差校正矩陣,圖9給出每一個樣本點處對應的二維擺鏡俯仰角和方位角的補償值。補償值的單位為二維擺鏡的碼值,二維擺鏡在360°范圍內共對應224個碼值。如方位角-50°、俯仰角-15°時的補償角為107,348,則需要將二維擺鏡的俯仰方向碼值增加107,方位方向碼值增加308,轉動后的位置即為經誤差校正矩陣修正后的二維擺鏡位置。在每個樣本點處,根據誤差校正矩陣將二維擺鏡位置修正后,得到補償后光斑質心坐標偏移量,如圖10所示。

圖9 不同俯仰、方位角時,二維擺鏡的補償角碼值Fig.9 Compensation angle code value of swing mirror with different elevation and azimuth

圖10 不同俯仰、方位角時,補償后的光斑偏移量Fig.10 Spot offset after compensation with different elevation and azimuth
顯然,經過粗跟蹤誤差校正矩陣修正后,光斑的質心坐標偏移量顯著減小,控制在相機中心±1.5個像素之內,對應光軸指向精度偏差約13 μrad。這表明誤差校正矩陣對光軸誤差有明顯的修正作用。進一步地,為了驗證誤差校正矩陣在任意角度處的可行性,選擇10組隨機的轉臺俯仰角和方位角,并選擇誤差校正矩陣中臨近的4個樣本點的值做線性疊加,得到對應的二維擺鏡補償角,并觀察補償后的光斑質心坐標情況,如表3所示。根據隨機點線性疊加修正結果,修正后最大的光斑質心偏移量為(1,-3)像素,表明粗跟蹤誤差校正矩陣對轉動范圍內的任意角度均有效,對校正主要因后光路安裝誤差導致的光軸指向偏差作用明顯,減小光斑質心坐標偏移量,大大降低了光機后光路系統誤差對激光通信的影響。

表3 隨機俯仰方位角時,補償后的光斑偏移量Table 3 Pixels of spot offset after compensation with random elevation and azimuth
5 結 論
本文根據星間激光通信機小型化的要求,對一通信發射-接收共光路的集約化設計激光通信機的光學系統進行了誤差源分析,并提出了校正因安裝誤差導致的光軸指向偏差的誤差校正矩陣。通過引入矩陣光學方法,提高了計算透鏡組誤差的準確性。采用蒙特卡洛方法模擬各安裝誤差對光軸指向精度的影響,結果表明在裝調過程中需要重點控制光學元件角度失調誤差、二維擺鏡轉軸失調誤差、透鏡位置失調誤差等影響較大的誤差種類。基于粗跟蹤和精跟蹤誤差校正矩陣的修正方案可以有效校正安裝誤差對光軸指向的影響,修正后的精跟蹤相機處的光斑質心坐標已經滿足星間激光通信鏈路的建立和穩定運行的需要。粗跟蹤誤差校正矩陣修正光軸指向精度的實機測試驗證了誤差校正矩陣方法的準確性和可行性。本文建立的激光通信機光學系統誤差源數學模型提高了對后光路光學誤差的分析精度,有助于提高裝調質量和效率;誤差校正矩陣方法有效修正因安裝誤差導致的光軸指向偏差,滿足激光通信機的工作需要,同時節約了通信機系統的運算資源,提高了跟蹤響應頻率;粗跟蹤誤差校正矩陣的實機測試證實了校正矩陣結合線性插值補償法可以實現對任意角度的誤差補償,大大簡化了通信機誤差補償算法,對實現星間激光通信具有相當的實用意義。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
