面向中學生的人工智能算法教學探究
2023-04-20 03:53:57郭彥哲
中小學信息技術教育 2023年4期
關鍵詞:人工智能
郭彥哲
【摘 要】本研究探索了在中學教授人工智能計算機視覺算法的教學方法,總結了計算機視覺算法教學的要點和技巧。作者選取了計算機視覺中的經典任務物體識別作為探究對象,以花朵的物體識別為例,通過將物體識別算法拆分為不同的步驟,根據學生的數學、物理、信息技術的知識背景,選擇重點進行教學并設計教法。該物體識別算法被分為顏色空間轉換、色調降維、圓圈算法、驗證等四個步驟,通過與學生日常學習、生活、娛樂的例子相結合,將抽象的算法問題趣味化、實例化、活動化,取得了良好的教學效果,為人工智能算法的教學提供了生動的案例。
【關鍵詞】人工智能;計算機視覺;物體識別;算法教學
【中圖分類號】G434? 【文獻標識碼】A
【論文編號】1671-7384(2023)04-084-03
當前,K12人工智能教育開展得如火如荼,各類機構、賽事、課程眼花繚亂。同時,人工智能也被各高校、研究機構、互聯網企業視為必爭之地,每年都有大量的人力物力投入。然而,目前最前沿的人工智能技術如機器學習、深度學習,大多是基于大學的數學知識,如線性代數、微積分、統計學等。對大部分成年人來說尚且生澀的知識,對于抽象思維還未發育完全、數學基礎正在搭建的孩子們無疑是巨大挑戰。這也導致了K12人工智能教育更多地轉向了對人工智能的感知,以及傳統的機器人、開源硬件、編程等內容。然而,這些內容是原本已有的教學內容和方法,并沒有真正將人工智能的核心——算法融入到教學中,學生仍存在缺乏對人工智能建立較科學的認識的問題。本研究將人工智能計算機視覺領域的算法引入中學課堂,以經典的物體識別任務為例,讓學生親身體會人工智能算法的精妙之處,點燃學生對人工智能研究的興趣,讓學生對人工智能算法有客觀的認識。
人工智能發展現狀與教學難點
目前人工智能的研究主要面向兩大方向,計算機視覺和自然語言處理。傳統的數據分析算法在這兩類數據面前都束手無策,因為傳統數據算法往往是基于關系型數據庫基礎上建立的結構化數據,對非結構化或半結構化數據缺乏處理手段和適應性。目前的人工智能算法的優點,正在于對非結構化或半結構化數據的魯棒性(robustness,音譯,人工智能領域詞匯,意為健壯、強壯)。人工智能的算法模型雖然基于上述高等數學知識,但是對于不同的任務或模型,往往需要一系列一般或特殊的預處理或后處理方法,這些方法能夠很大程度地影響到整個模型的表現。即使是當下最火的自然語言處理模型ChatGPT,所涉及的前處理方法也和之前的模型是類似的。這些預處理或后處理方法,有的是基于如圖論、排序等傳統計算機算法,有的是新提出的針對非結構化數據的方法(如詞語向量化),有的甚至比模型本身的數學理論更復雜(如支持向量機),有的并不需要數學背景知識(如中文分詞)。因此,如果想教授人工智能算法,應該基于學生的年齡、知識背景,從可理解的人工智能模型、前處理/后處理方法入手,設計教法、開發課程。依照該思路,作者選取了計算機視覺中的經典任務——物體識別,以識別花朵的圖像處理算法為例,設計了一堂面向中學生的人工智能算法課,利用學生已有的數學基礎和生活實例,用小步子教學法逐步深入,降低算法理解難度。
物體識別算法的教學實例探究
計算機視覺的任務通常分為預處理、特征提取、檢測/模式識別、驗證等步驟,物體識別算法也不例外。通過學習物體識別算法,學生可以了解計算機視覺乃至人工智能的一般算法步驟,從而建立對人工智能算法的初步認識。實例所用的花朵識別算法,將該過程分為了四個大步驟:一是預處理:顏色空間由RGB格式轉為HSV;二是特征提取:確定花的色調區間,并轉化為黑白圖片;三是檢測/模式識別:邊緣處理,圓形查找算法標記花朵;四是驗證:與手工結果對比,計算正確率。
1.預處理—— 顏色空間轉換的“小游戲”
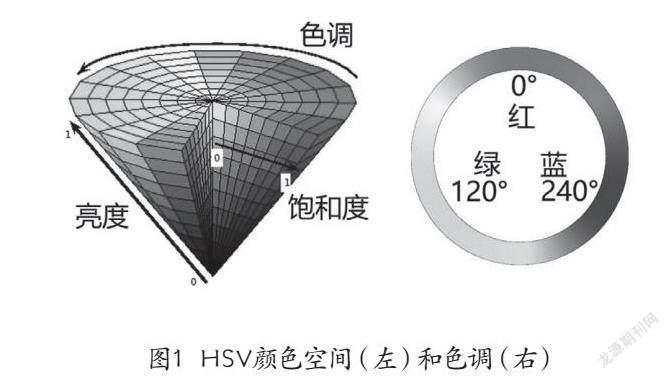
第一步是預處理。用于計算機視覺的圖片來源各異,圖片的大小、格式、分辨率、顏色也各異,關鍵信息往往用較少的顏色、分辨率等維度即可體現,因此,預處理需要對圖片格式進行統一規范和降維處理。該算法中,顏色從RGB格式到HSV格式。RGB格式的本質是用紅綠藍三種相互獨立的顏色作為顏色空間的參數,因此這三種顏色的值相當于三維直角坐標系的三個方向上的值。HSV格式的表示形式如圖1所示。其中,S(飽和度)和V(亮度值)用兩個相互獨立的方向上的距離表示,H(色調)用角度表示。圓柱坐標系由徑向距離、方位角、高度(“一角度兩距離”)表示,與HSV格式一致。因此,HSV格式可以理解為數學中的圓柱坐標系。圓柱坐標系是二維的極坐標系擴展到三維坐標系后的其中一種,另一種是球坐標系。球坐標系由方位角、仰角和距離(“兩角度一距離”)三種元素構成[1][2][3]。
中學生只學習了直角坐標系,極坐標系的概念是高中的內容[4],需要作為新知識點引入介紹,對于原本時間十分有限的課堂時間形成了不小的挑戰。為了抓住學生的眼球,同時實現有效的教學,本課使用了學生常接觸的游戲為例,說明不同坐標系的作用,并進行比較。首先,給出五子棋的例子,引導學生思考,用直角坐標系來表示五子棋的位置,便捷且直觀。極坐標系的概念相對陌生且不容易說清楚,因此借鑒了常見的“黃金礦工”小游戲的例子。該游戲通過控制發射抓手的方向,決定所獲得的獎品,抓手的方向相當于極坐標系中的角度。根據課堂反饋,學生都玩過這個游戲且熟悉規則,并知道關鍵在于角度的選擇。接下來,引入極坐標系的概念,由角度和距離組成。由平面極坐標系可以延伸到圓柱坐標系,用一個角度和兩個距離表示點。直角坐標系和圓柱坐標系都介紹完后,便可以解釋顏色的兩種表示方法:RGB格式和HSV格式。需要強調的是,色調(角度)表示的是顏色,按照赤橙黃綠青藍紫轉了360°。因為色調是下一步處理的基礎,轉換過程不需要詳解,只需要告訴學生有公式可以套用即可。
結合學生熟悉的游戲案例教學極坐標系,讓學生能夠感知極坐標系的特點,且不會因枯燥的純數學知識影響學習積極性;運用接觸過的游戲案例,引起學生共鳴的同時激發思考欲和探索欲,學生能積極主動地參與新知識教授過程的反饋,讓教學者能夠及時了解學生的學習情況。實踐中,較低年級的中學生也能夠通過該案例理解極坐標系的概念和顏色空間的轉換過程。
2.特征提取—— 色調與顏料盤
第二步是特征提取,將與任務目標相關的特征與無關特征進行分離,減少噪聲,增強對比,進一步實現降低維度。因為目標黃色大丁草花朵是黃色的,因此需要確定對應黃色像素點,并轉化為黑白圖片。花的部分用白色表示,其他部分用黑色表示,實現目標分離。
上一步將RGB轉換為HSV后,只需選取HSV中表示色調的部分進行篩選。這里需要向學生展示HSV的圓錐3D圖(圖1左),并指出色調所在的維度是角度。如0°代表紅色,120°代表綠色,240°代表藍色(圖1右),形如一個調色盤,所有顏色是以紅橙黃綠青藍紫連續變化的,最終紫色和紅色相接,形成閉環。另外兩個維度(飽和度、值)只會影響顏色的深淺和亮暗。將黃色色調的區域轉換為白色,其他色調區域轉換為黑色。這樣原本每個像素點有三個數字表示,現在簡化為0或1的黑白圖,并且充分保留了花朵的信息,為下一步處理提供了便利。
聯系學生熟知的紅橙黃綠青藍紫的顏色序列,調色盤的比喻將色調閉環的概念具象化,方便了學習者理解色調的含義。顏色空間轉換和色調選取都是人工智能計算機圖像領域的常用預處理方法,無論是圖像分類還是體態分析等算法的預處理,都需要用到,因此,這兩個步驟的教學為未來的人工智能圖像處理算法學習打下了良好基礎。
3.檢測/模式識別—— 手動體驗核心算法
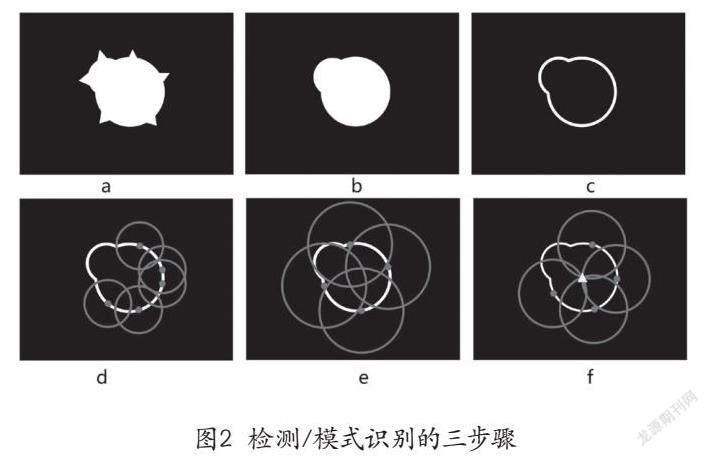
第三步,檢測/模式識別包含計算機視覺任務的核心模型和關鍵算法,在該目標識別任務中,包含了目標形狀修飾和目標形狀搜索。其中目標形狀修飾使用了邊緣處理,目標形狀搜索使用了圓形查找算法。假定目標的花朵形狀近似于圓形,使用邊緣處理使其趨向圓形(圖2a→b);然后將黑白的交界處轉為白色,其余部分轉為黑色(圖2b→c);最后,使用圓形查找算法找出圓形(圖2c→f)。
圓形查找算法體驗時,讓學生使用不同的半徑,以白色邊緣上的點為圓心畫圓。在畫圓的過程中,學生能夠感受到該算法的查找過程,即同一半徑畫的圓如果能找到共同交點,即為找到一個圓的圓心(圖2f,交點以三角形表示),若畫圓的半徑偏小(圖2d)或偏大(圖2e),都無法找到交點。每個被標記的圓圈將被作為一朵花。
圓形查找算法是該物體識別算法的核心部分,理解該算法能夠讓學生體會到人工智能的算法之美。對于編程基礎有限的中學生,編程實現并不現實,此處利用了圓規畫圓找規律的活動,讓學生主動觀察思考,發現所選半徑和交點的關系,從而深刻理解圓形查找算法的關鍵點,成功實現了直觀理解。
4.驗證—— 體驗人工智能的高效精準
第四步,驗證算法的有效性和準確性,體現人工智能圖像識別算法的高效、精準,同時指出存在的不足,讓學生充分體會人工智能圖像識別算法的優勢和潛在改進的地方。
與手工結果對比,計算正確率。這個步驟較為簡單,只需數出圖片中圓圈的數量,再從彩圖中數出花的數量,前者除以后者,便可得到正確率。學生基本可以看著圖自行完成。同時,總結該算法的準確率,能夠算出花的數量,但是有一定的誤差,讓學生看到算法有可提升的空間,鼓勵學生樹立進行人工智能算法研究的志向。
總結與反思
本研究探索了以趣味化、實例化、體驗式的方法進行計算機視覺目標識別算法的教學。前處理中顏色空間轉換采用了游戲案例比喻,將數學知識趣味化呈現;色調的講解結合了調色盤的實例,將抽象概念實例化;核心算法的教學設計了動手體驗的活動,將抽象算法變成了具體的任務,實現了“做中學”“玩中學”。前兩步驟是人工智能計算機視覺的常見前處理方法,為學生將來學習其他人工智能圖像算法奠定了良好基礎。核心算法的教學證明了讓中學生理解人工智能算法并不是遙不可及的任務,需要教師廣泛且深入地了解人工智能的各項算法,同時結合中學生的數學、物理等知識背景設計活動,是可以實現中學生直觀理解人工智能算法的。
參考文獻
孫堅,臧濤成, 駱者虎,等. 在球和柱坐標系下作用于矢量函數的拉普拉斯算子[J]. 蘇州科技大學學報(自然科學版),2019(1).
彭玉忠. 中學數學幾種新增坐標系的構造及其應用[J].湘潭師范學院學報(自然科學版), 2009(1).
王涵云. 淺析極坐標系與坐標旋轉[J]. 讀寫算: 教研版,2015(18).
劉殿芳,劉秀輝. 淺談極坐標在高中數學中的應用[J].中學課程輔導(教學研究), 2018,12(26).
Bairwa N,Agrawal N K. Counting of flowers using image processing[J]. International Journal of Computer Applications, 2014(3): 0975-8887.
作者單位:福建廈門大學附屬科技中學
編? ?輯:徐靖程
猜你喜歡
西安航空學院學報(2022年2期)2022-07-04 07:45:42
汽車零部件(2020年3期)2020-03-27 05:30:20
表面工程與再制造(2019年1期)2019-05-11 08:52:04
商界(2019年12期)2019-01-03 06:59:05
家庭影院技術(2018年9期)2018-11-02 05:31:34
IT經理世界(2018年20期)2018-10-24 02:38:24
通信電源技術(2018年3期)2018-06-26 06:33:30
軍營文化天地(2018年1期)2018-02-10 05:19:25
小康(2017年16期)2017-06-07 09:00:59
學與玩(2017年12期)2017-02-16 06:51:12
