基于自平衡算法的移動機器人系統研究與設計
2023-04-24 16:32:05程楚錦王龍劉杰黃心怡劉天
客聯 2023年12期
程楚錦 王龍 劉杰 黃心怡 劉天

摘 要:本文主要設計自平衡算法的移動機器人系統,該系統由電機、陀螺儀、加速度計和控制系統等組成,通過加速度計和陀螺儀等傳感器獲取車身姿態信息,并通過控制電機轉速實現自行平衡。轉向控制可以通過改變電機轉速實現,速度控制可以通過PID控制實現。通過對實驗結果分析,平衡效果達到預期目標。
關鍵詞:自平衡;轉速控制;螺儀
一、自平衡原理
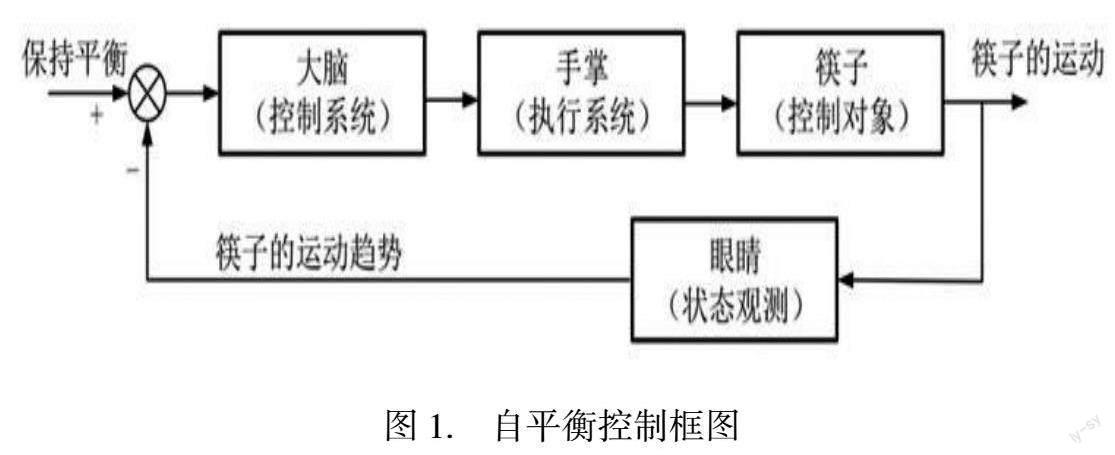
自平衡移動機器人的平衡控制原理,可以很直觀地從生活經驗中獲取。例如在生活中,拿一根筷子豎著擺放在手掌中,為了保持筷子不倒,需要用眼睛時刻觀察筷子的傾倒趨勢,同時手掌順著筷子傾倒的方向移動,手掌移動的速度需要跟隨筷子傾倒的速度,這樣才能保持筷子始終不倒。從中可以發現眼睛的觀察和手掌的移動是兩個必備的條件,這樣便構成了具有負反饋機制的控制系統,如圖1所示。
二、自平衡移動機器人系統動力學建模
基于飛輪平衡控原理搭建了一款單輪車機器人,根據其結構,設計出如圖2所示的自平衡移動機器人,運用飛陀螺效應,采用兩側對稱分布的結構形式將飛輪安裝在樣機上,通過雙飛輪進行橫滾方向和航向角度的控制,并將機器人整體看作倒立擺進行俯仰控制。
三、自平衡移動機器系統算法設計
自平衡移動機器人控制方法主要包括姿態控制、轉向控制和速度控制。姿態控制是指通過加速度計和陀螺儀等傳感器獲取車身姿態信息,并通過控制電機轉速實現自行平衡。轉向控制可以通過改變電機轉速實現,速度控制可以通過PID控制實現。此外,還可以通過機器學習等算法實現更加智能化的控制方法。常用的算法包括PID控制算法、卡爾曼濾波算法、神經網絡算法等。
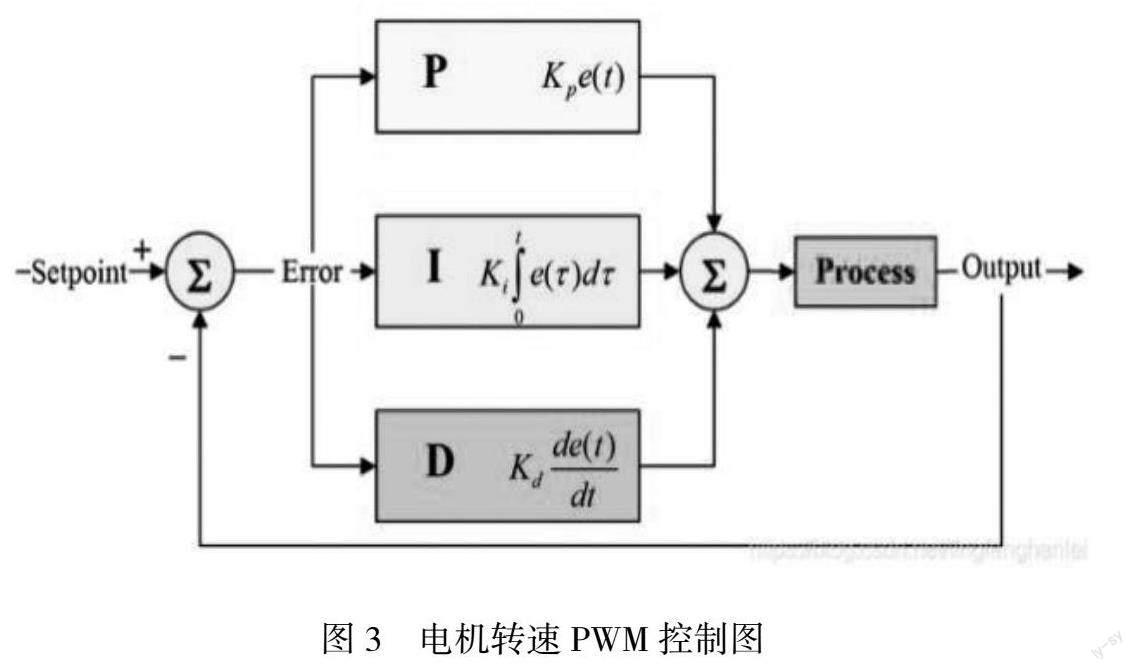
(一)PWM電機調速
先對電機調速以及電機正反轉控制,是利用PWM技術,并根據需要改變占空比,從而達到來改變直流電機上電壓的占空比,進而改變平均電壓,控制電機的轉速。如圖3所示。
(二)姿態解算
陀螺儀和加速度數據的融合(MPU6050)當實現了電機調速之后,如何獲取姿態信息,采用MPU6050測小傾斜的角度。mpu6050是一個加速度計和角速度計集成一體的六軸芯片。可以測出當前物體的加速度和角速度。然后融合得出當前姿態角,采用融合濾波的方法實現2種傳感器的數據融合,以克服加速度計的動態誤差和陀螺儀的漂移誤差,即以加速度計獲得的角度信息對陀螺儀輸出信息進行校正,通過對比積分所得到的角度與加速度所得到的角度之間的偏差來改變陀螺儀的輸出,從而使積分的角度逐步跟蹤到加速度傳感器所得到的角度。該方法利用加速度計所獲得的角度信息與陀螺儀積分后的角度進行比較,將比較的誤差信號經過比例系數1/Tg放大后與陀螺儀輸出的角速度信號疊加然后進行積分。對于加速度計給定的角度,經過比例、積分環節之后產生的角度。數據濾波融合過程如圖4所示:
【參考文獻】
[1] 黃用華,王昌盛,何淑通,等. 雙車把兩輪車機器人同步擺把平衡控制研究[J]. 控制工程,2019,26( 7) : 1262-1269.
[2] 莊未,孫兵,李高明,等. 獨輪車機器人原地定位的平衡控制分析[J].機械設計與研究,2018,34( 5) : 31-36.
課題項目:湖北汽車工業學院2023年度大學生創新創業訓練計劃項目“智能車度獨輪組”(DC2023094)。