高級輔助駕駛系統主動安全性評價方法
2023-04-29 00:44:03王銀亭吳長水
汽車安全與節能學報 2023年1期
關鍵詞:評價方法
王銀亭 吳長水

關鍵詞:主動安全;高級輔助駕駛;評價方法;裕度與不確定度(QMU)
在國家行動綱領《中國制造2025》的引領下,智慧城市是未來發展的重點領域,具備高級輔助駕駛的汽車是智慧城市中的重要角色,為保證城市交通安全,汽車在進入市場前要經過嚴格的測試與評價[1-2]。當前,全球對于高級輔助駕駛系統的評價還未形成統一的標準體系。J.B.Kim等提出了基于攝像頭(單目或雙目)的測試評價方法,此外還提出了綜合場景以及場景連續生成的方法[3]。D.T.Son等提出了基于仿真的高級駕駛輔助系統與自動駕駛技術開發的測試評價與驗證框架,其中評估輔助駕駛系統的性能指標可以根據不同的測試工況進行調整[4]。H.Braun等提出了在仿真模型的基礎之上對車輛進行安全分析與評價的新概念,通過量化不同評價指標之間的聯系,積分臨界測量沖突風險與碰撞風險,模糊與缺失知識的處理來提高臨界評估的質量,基于最大熵原理生成一個完整的安全駕駛模型,通過分析車輛運動數據探尋出駕駛情況的臨界性,進而確定車輛的安全性[5]。
國內研究人員將評價方法分為定性評價方法與定量評價方法。定性評價普遍采用專家經驗法,聚集相關領域的專家,通過自身的知識經驗積累和觀察評價目標的表現與狀態,歸納總結出非量化的評價結果。定量評價是結合數學方法,采集和處理測試數據,最后以精準的數值體現評價對象全部信息的方法,包括獨立指標評價和聯合指標評價[6]。朱冰[7-8]等提出了基于自然駕駛數據對具有高級輔助駕駛系統的汽車安全性進行評價的方法,通過分析車輛的自然駕駛數據提出高級輔助駕駛系統的安全性評價指標—場景風險系數,以此實現邏輯場景層面的輔助駕駛系統安全性的定量評價。魏子茹[9]等使用層次分析法和基于層次相關性的客觀賦權法來確定評價指標的權重,并且將灰色關聯理論評價方法與模糊綜合評價方法結合,以此實現高級輔助駕駛系統車輛綜合性的定量評價,減少了主觀意識的參與,提高了評價結果的客觀性。李茹[10]等提出了一種熵值法與序關系分析法相結合來確定測試評價指標權重的方法,同時使用模糊評價方法對輔助駕駛車輛進行綜合性的定量評價,解決了評價過程計算量大、復雜度高、普遍適用性低等問題。
上述研究的評價方法大都是從單個高級輔助駕駛系統的角度出發,缺乏對高級輔助駕駛系統種類多樣化的總體考慮,以及多個系統單個評價指標之間的橫向對比。為解決上述問題,本文將裕度與不確定性量化(quantificationofmarginsanduncertainties,QMU)的評估方法引用至高級輔助駕駛系統主動安全性的評價體系中,總結得出適用于高級輔助駕駛系統主動安全性的評價方法,并采用序關系分析法(G1)確定評價指標的權重系數,利用模糊綜合評價方法對單指標評價結果進行綜合,從而得到客觀、量化的綜合性評價結果。
1基于QMU的高級輔助駕駛系統主動安全性評價方法
裕度與不確定性量化(QMU)是一種將不確定性考慮在內并通過裕度與性能通道閾值為關鍵要素的風險評估方法,主要對系統工作之前的可靠性進行評估,具備多源信息融合的能力,適用于數據不足、知識缺乏情況下的高風險復雜系統的可靠性評估[11]。其評估流程分為3個部分:首先通過建立系統的失效模型獲得失效指標,組成觀測清單;其次使用模型預測,實驗數據,以及專家判斷建立性能通道;最后進行不確定性源分析并對其進行量化得到置信因子。QMU的基本定義是一個廣義概念,具體操作流程由所評估的具體系統性能決定[12-13]。
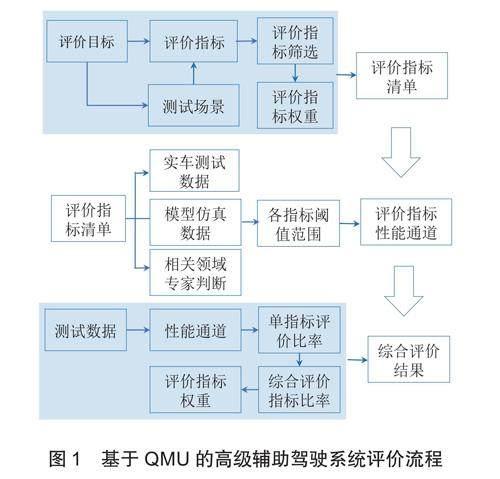
本文在結合QMU基本工作原理后,提出了高級輔助駕駛系統主動安全性評價方法,其評估框架包括:結合具體測試用例建立評價指標觀測清單;獲取各個評價指標性能通道的閾值;計算各個指標的評價比率;綜合各個指標的評價比率對高級輔助駕駛系統的主動安全性進行評估。具體評價流程如圖1所示。
1.1評價指標觀測清單
評價指標觀測清單的正確建立保證了評價結果的準確性,需考慮多方面因素后對評價指標進行選取,再利用序關系分析法確定各個指標的權重,最終得到測試評價的指標清單。評價指標觀測清單建立流程如圖1所示:
1)選取評價指標
根據測試需求提取出測試評價目標以及滿足測試需求的測試場景,由相關領域專家充分分析評價目標與測試場景,再結合新車碰撞測試(newcarassessmentprogram,NCAP)法規制定評價指標清單。具體的評價指標清單則根據具體的測試需求與評價目標進行改變。
2)確定指標權重
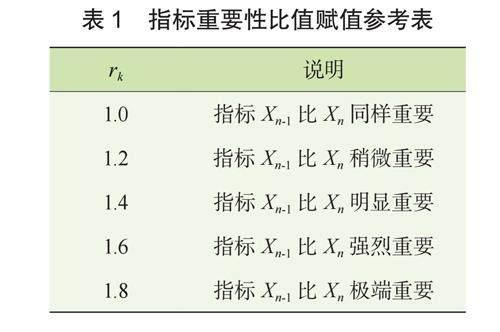
根據相關領域專家對指標體系的主觀經驗與建議[14]將評價指標依據重要性進行排序,即
1.2評價指標性能通道
建立性能通道的方法一般分為3種,即基于實車測試數據的方法、基于模型預測的方法、基于專家判斷的方法[15]。模型預測方法需對模型進行驗證與確認,增加了計算的復雜度,并不適合工程應用。基于專家判斷的方法增加了企業評價成本,基于實車測試數據的方法具有高真實性的特點且測試數據可循環利用,故本文選擇基于實車測試數據的方法來建立評價指標的性能通道。
性能通道是以10臺不同類型搭載不同駕駛輔助系統的真實車輛的測試數據為基礎進行構建,相同類型車輛同一指標構建出一個性能通道即該指標的閾值;同一評價指標,不同類型的測試車輛所搭建的性能通道不同;同類型的車輛,不同指標所搭建的性能通道不同。某指標的閾值范圍可代表多個高級輔助駕駛系統某一性能水平的上下限。不同駕駛輔助系統的相同指標在同一閾值內進行比較,開發者便可直接看出系統之間是否存在差距以及存在差距的評價指標及性能。
1.2.1測試設備及數據采集平臺搭建。
測試設備及數據采集平臺主要由全球目標車輛(globalvehicletarget,GVT)與測試車輛(vehicleundertest,VUT)2部分組成,如圖2所示。全球目標車輛的滑板底盤配有RTKGNSS模塊,VUT配有駕駛機器人和RT3005GG高精度慣性導航系統。其中駕駛機器人可記錄方向盤轉角、測試車行駛路徑等信息,RT3005GG慣性器件可記錄車輛的位置、速度、加速度、航向角、俯仰角以及橫滾角等信息,最后將記錄的數據匯總至上位機,便于測試人員對設備運行狀態的實時監控以及測試數據的保存下載。
參考國內真實道路駕駛場景以及中國新車評價規程(China-newcarassessmentprogram,C-NCAP)、歐洲新車安全評鑒協會(Europeannewcarassessmentprogrammer,E-NCAP)管理規則提取出適用于國內道路的典型邏輯場景[16],并利用封閉場地設備以及實車數據采集平臺對典型邏輯場景進行復現。
將邏輯場景中的連續參數離散化生成具體的測試場景用例,再利用測試設備及數據采集平臺對同類型搭載著不同高級輔助駕駛系統的汽車進行遍歷測試。在測試數據采集過程中,目標車按照設定的路徑行駛,測試車則由監控員控制駕駛機器人行駛或者按照個人駕駛習慣行駛。
為保證測試數據的有效性,每個測試用例至少測試2次,若2次測試數據值均在允許的誤差范圍內,則取這2次數據值的平均值;若2次測試數據值相差較大則進行第3次與第4次測試,若第3次、第4次的測試結果與第1次或者第2次的測試結果在允許的誤差范圍內則取其3次測試結果平均值。以此類推,取多次相近的測試數據值進行平均值計算,作為該測試用例的最終結果。
1.2.2指標數據分析。
通過測試數據采集平臺所測得的數據對其進行統計學分析同一評價指標在不同種類的輔助駕駛系統測試下會得到不同的數值,將各個評價指標的數據進行分類作為統計學分析的數據樣本。通過求取樣本數據的平均值、方差以及標準差來剔除樣本中的異常值[17],從而得到樣本數據的閾值,即性能通道上下限的數值。
1.3模糊綜合評價指標比率
以QMU的計算原理為基礎,將測試車評價指標的測試數據中位值與其性能通道下限值的差值作為裕度(M),則
其中:Smax、Smin分別為某輛搭載輔助駕駛系統車輛觀測參數測試的上限值、下限值,Ymin為性能通道的下限值。
其評價指標數據波動區間的半寬度作為不確定度(U),則
指標評價比率CF與常量1組成高級輔助駕駛系統的評價依據。若CF<1,則代表該評價指標波動范圍漂移至性能通道閾值下限以外,此結果表明:該項指標需重點關注并且該指標在具備輔助駕駛系統車輛上所反應的單項功能尚不完善,有待進一步調整;相反若CF>1則代表該項指標處于正常的閾值范圍之內,該指標在具備輔助駕駛系統車輛上所能體現的單項功能可通過。
搭載不同高級輔助駕駛系統的同類型車輛,相同的單指標之間也可進行對比。不同的高級輔助駕駛系統的單指標所代入的指標閾值相同,故其比值可表示性能強弱。例如:A、B兩車的相同指標所得到的單指標比率分別為CFA與CFB,若CFA的比率大于CFB的比率,則反映出A車系統在該指標上的性能強于B車系統,反之,則B車系統的性能強于A車系統,由此可對多個高級輔助駕駛系統的單指標性能進行橫向對比。
基于QMU計算原理,結合NCAP法規評分規則,假設每個指標都處于理想的最佳狀態,按照上述綜合比率計算方法可得出綜合比率結果為T=6,同理假設每個指標比率不通過,則綜合比率結果無限接近于零。參考Euro-NCAP評分體系將其平均分為5檔:0~1.2為基本達標,1.2~2.4為及格,2.4~3.6為良好,3.6~4.8為較優,4.8~6.0為最優。
2高級輔助駕駛系統主動安全性評價方法驗證
評價高級輔助駕駛系統主動安全性所需的測試評價內容包括自動緊急制動(autonomousemergencybraking,AEB)功能、前向碰撞預警(forwardcollisionwarning,FCW)功能、車道保持輔助(lanekeepingassist,LKA)功能、車道偏離預警(lanedeparturewarning,LDW)功能,如表2所示,其中,測試項目包括前車靜止(cartocarstationary,CCRs)、前車慢行(cartocarmoving,CCRm)、前車制動(cartocarbraking,CCRb)、車輛碰撞近端行人(car-to-pedestriannearsideadult,CPNA)、車輛碰撞遠端行人(car-to-pedestrianfarsideadult,CPFA)。
以上測試項目都需使用基于場景的測試方法[18]以及封閉場地測試設備對搭載輔助駕駛系統的車輛進行測試。根據NCAP法規,自動緊急制動(AEB)是高級輔助駕駛系統中一項經典的主動安全功能,CCRm(用以測試車輛最高速度)以及CPFA(用以測試車輛最高速度)可涵蓋到AEB的全部測試工況點,故本文以CCRm、CPFA為例對此方法進行計算驗證,具體測試用例參數如表3所示,該車輛部分參數如表4所示。
2.1評價指標觀測清單
中國新車評價規程(C-NCAP)與歐洲新車測試評價標準(E-NCAP)在ADAS主動安全性方面是行業內最認可的評價規則。本次測試在選取評價指標時,充分參考以上2部法規中對測試評價指標的描述規定、中國真實的道路特點以及專家實際的測試評價經驗。
基于上述高級輔助駕駛系統主動安全性評價方法中評價指標觀測清單的建立流程,本次評價實例中評價指標包括:測試車車速(vVUT);測試車縱向加速度(aVUT);目標物與測試車的最短相對距離(DVUT-GVT);測試車的橫擺角速度(ωVUT)。結合AEB領域專家建議[19-20]與具體測試用例,該測試評價指標的重要性為利用理性賦值法[21]對其重要性之比賦值為:
將上式代入式(3)與式(4)計算得到各個評價指標權重,如表5所示。
2.2評價結果
將其測試數據代入式(5)—式(9)中,得到的評價指標參數數據結果如表6所示。單指標評價比率分別為3.6601、2.6704、1.7678、1.8192,將單指標的評價比率以及權重代入式(10)中,得到測試場景下的綜合評價結果為T=2.702。根據本文所制定的評分規則可總結出該輔助駕駛系統的AEB功能綜合表現良好。
3結論
本文將基于結合裕量與不確定度(QMU)的評估原理與高級輔助駕駛系統的主動安全性評價相結合,得出基于QMU的高級輔助駕駛系統主動安全性的評價體系以及評價流程。文中詳細描述了在高級輔助駕駛系統主動安全性的評價體系中,建立評價指標觀測清單,創建評價指標性能通道和計算綜合評價比率的方法。該方法量化了輔助駕駛系統主動安全性的縱向評價結果,測試車車速、加速度、與目標車的距離、方向盤轉角速度的評價結果分別為3.6601、2.6704、1.7678、1.8192,綜合結果為2.702。對于同類型搭載不同高級輔助駕駛系統的汽車,利用單指標的評價比率可對其單項功能進行橫向對比,依據綜合指標評價比率可對其整體能力進行橫向對比,有利于開發者了解多種高級輔助駕駛系統之間的差距,彌補自身開發的不足。
本文在基于QMU高級輔助駕駛系統主動安全性評估方法中,利用序關系分析法來確定評價指標的權重矩陣,使用模糊綜合評價方法得到評價矩陣,再將二者相結合得到最終的綜合評價結果,減少了評價流程中主觀意識的參與度,使評價結果更具有參考性,并提高了整個評價體系的客觀性。
本文采用基于場景測試的方法,利用封閉測試場地的設備復現前車慢行(CCRm)和成人(Ped)的邏輯測試場景,驗證了該評價方法的可行性與有效性,為自動駕駛汽車后續的綜合性能評價提供理論依據以及數據支撐,從而促進整個自動駕駛汽車行業技術的快速發展。
猜你喜歡
中國綠色畫報(2016年7期)2016-12-26 18:20:14
未來英才(2016年2期)2016-12-26 09:57:17
科技創新與應用(2016年34期)2016-12-23 19:06:08
中學課程輔導·教學研究(2016年14期)2016-12-23 17:02:58
商情(2016年43期)2016-12-23 14:31:42
計算機教育(2016年9期)2016-12-21 00:54:05
汽車科技(2016年6期)2016-12-19 20:28:28
成長·讀寫月刊(2016年11期)2016-12-14 18:29:14
都市家教·下半月(2016年10期)2016-11-30 22:20:37
企業導報(2016年11期)2016-06-16 15:58:19