C1電動教練車動力系統設計與控制策略
2023-04-29 00:44:03劉刊齊海波牛阿慧閆炳強秦軍超
汽車安全與節能學報 2023年3期
關鍵詞:控制策略
劉刊 齊海波 牛阿慧 閆炳強 秦軍超
關鍵詞:汽車工程;C1電動教練車;電機模擬發動機;C1駕考;控制策略
中國每年約有3000萬人參加駕駛培訓[1],而教練車絕大多數仍是油車。較低的學員駕駛水平及駕考科目的要求,使得發動機頻繁啟動,長時間處于怠速、低擋位行駛,導致油耗高、污染重[2],因此以節能減排為目標的駕校電動化升級,是實現國家“雙碳”戰略的關鍵技術。
國外駕駛練習大多用私家車,駕培未形成規模,供參考的相關文獻較少[3]。國內對電動教練車的研究可追溯到2005年,龐俊公開了一項專利“電動教練車”[4]。之后研究的高校有吉林大學、石家莊鐵道大學、長安大學、武漢科技大學等,研究范疇涉及對燃油教練車的電動化改制、動力電池與電機的參數化設計、電機控制器設計等,相關研究局限于理論和仿真,缺乏實車驗證[5]。而研究電動教練車的公司一般選擇與駕校合作,在燃油教練車上進行改裝[6],這種改制缺少主機廠的參與,無法上公告。
本文中C1/C2電動教練車指的是能練習或考試C1/C2駕照的汽車。雖然C2電動教練車技術已較成熟,但因C1駕照可駕駛C2車型,反之不可,當前考C1駕照的學員占絕大多數,故對C1電動教練車的研究成為各大主機廠關注的技術焦點[7],其技術方案可分為純模擬和半模擬兩種。純模擬是指去除發動機和多擋手動變速器,通過電機來模擬發動機和變速器的性能;半模擬是指車輛只去除發動機,通過控制電機的做功來模擬發動機的性能,通過電機轉速來適配多擋變速器的擋位狀態。其中北汽和比亞迪采用的是純模擬技術,該方案因無多擋變速器,故與駕考油車操控差異較大,會給學員練車與考試帶來心理壓力。采用半模擬的有東風富康e愛麗舍和本文研究的委托奇瑞汽車定制生產的eQ2。東風富康e愛麗舍因無應用示范考點,故不能當考試車;本文設計的教練車已協助建成兩家示范考點。
目前,C1電動教練車技術仍在探索中,產業界與學術界對此提出了很多的創新研究[8],但對關鍵的電機模擬發動機操控的軟件技術研究十分有限。本文根據駕校實際需求,以C1電動教練車為研究對象,基于半模擬技術方案,設計并匹配了動力系統,構建并驗證了電機模擬發動機的控制策略,開發并優化了電機模擬發動機的軟件技術。
1C1電動教練車動力系統設計
1.1整車需求與架構設計
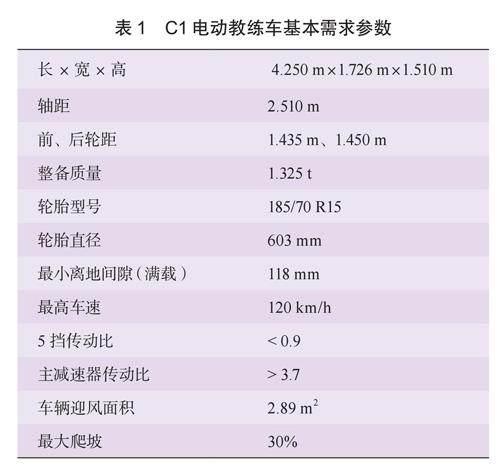
本文負責動力傳動系統的參數化設計、選型,委托奇瑞汽車優化了車輛底盤與車身結構,整車基本需求如表1所示,圖1所示為本文采用的整車技術架構。
1.2電機參數設計與選型
本文電動教練車的動力驅動裝置選用的是永磁同步電動機[9],其動力性能需能完成科目二與科目三的所有項目。
其中:η是傳動效率,一般取經驗值87%~92%;m是整車的滿載質量;g是重力常數;f為路面滾動阻力因數,一般取經驗值0.010~0.018;v是車輛行駛速度;α是坡道角度;A是車輛迎風面積;CD是空氣阻力因數,一般取經驗值0.28~0.4;δ是車輛旋轉質量的換算系數,一般取經驗值1.1~1.4;dv/dt是車輛的加速度。
當車以最高車速120km/h行駛時,一般認為在平路行駛,即α=0,最高速度時dv/dt=0,代入式(1)可得電機的最大功率P1m
經過對比分析,決定選擇奇瑞安川電驅動系統有限公司生產的Pe=41.8kw、Te=150Nm、Ue(額定電壓)=336V的電機作為本文電動教練車的驅動電機。
1.3動力電池參數設計與選型
本文中電動教練車使用的動力電池的布置設計由奇瑞汽車來完成,其根據駕校使用條件和性能需求,負責合理分配軸荷,確定動力電池的外形尺寸以及連接方式、設計散熱和溫度控制等[10]。
電機的電能由動力電池提供,故動力電池的額定電壓與電機的額定電壓需相等[11],因此,本文選用的動力電池的額定電壓為336V。
電動汽車動力電池的能量W與其續航里程的關系為其中:P為車輛平均車速時的功率,在1.3~2.6kW;S為續航里程,130~200km;vpj為平均車速,在10~20km/h,經計算動力電池的能量在16.9~26kWh。
駕校一輛教練車平均每天工作8~12h[12],行駛130~200km,考慮到整車購置成本以及電池衰減20%后還能滿足一天的教學練車,本文電動教練車在新歐洲駕駛循環周期(newEuropeandrivingcycle,NEDC)工況下的設計續航是251km,設計能量為32.3kWh。
動力電池存儲的電量可用電池容量Q來表示,計算式為
其中:W為動力電池的能量,U為動力電池的電壓,Q為車輛以最快車速行駛時所需要的電池容量。
考慮到電池成本以及主機廠供應商等因素,本文選用蕪湖奇達動力電池系統有限公司生產的U=336V的三元鋰電池。
計算得到動力電池參數:W=32.3kWh,Q=96.13Ah。
2電機模擬發動機的控制策略
2.1點火功能
本文設計的點火開關與燃油車一致,分為OFF、ACC、ON、START共4個位置,同時配有模擬發動機聲音的蜂鳴器。其中:OFF代表斷電“熄火”;ACC表示低壓電源通電,部分電器元件可工作,如收音機、儀表、車窗等;ON代表除電機外的電器設備都可正常工作[13];START代表“點火”啟動電機,在控制器的控制下電機開始空轉。
本文設計的點火功能的模擬控制策略框圖如圖2所示。
“點火”時狀態如下:1)應處于空擋,點火開關打到START位置隨即自動彈回到ON位置;2)電機以及其控制器溫度需在規定范圍內;3)電機轉速達到1000~1100r/min,之后慢慢下降;4)電機控制器會驅動蜂鳴器發出聲音來模擬發動機的啟動聲音,且蜂鳴器的聲音會根據發動機的真實啟動情況實時發生變化。
2.2怠速功能的模擬控制策略
怠速是指不踩離合器踏板和加速踏板,且變速器不掛擋(空擋)時,電機無負載運轉的狀態。
怠速工況下電機轉速維持在700~800r/min,電機控制器根據油門踏板以及車速信號來確定當前狀態是否為怠速工況;確定了怠速工況后,控制器根據接收到的電機溫度、A/C開關以及空擋開關信號來查表確定電機的目標轉速,之后將其與電機的實際轉速進行比較,根據比較結果來調整電機的轉速。電動教練車怠速功能的模擬控制策略如下圖3所示。
2.3起步功能的模擬控制策略
電動教練車的起步需要與手動擋燃油車保持一致,起步分平路起步和半坡起步。平路起步的步驟是踩離合、掛1擋、慢松離合至起步完成;半坡起步的步驟是踩離合、掛1擋、慢松離合至車輛抖動時一邊松手剎一邊輕踩油門至起步完成。
電機控制器根據接收到的擋位、離合器踏板[14]以及坡度信號來查表確定電機的目標扭矩,之后將其與電機的實際扭矩進行比較得出扭矩差值,再根據油門踏板以及制動踏板信號對實際扭矩進行修正,直到實際扭矩與目標扭矩一致。起步功能的模擬控制策略如下圖4所示。
平路起步時,慢松離合器,電機的轉速需略有下降,起步要平穩,避免起步時電流過大而瞬間竄出;如果離合器松的過快,會導致電機轉速下降很大,控制器命令電機停止運轉,模擬發動機熄火。
半坡起步時,需等到車輛開始輕微抖動才逐漸松開手剎,手剎松的過晚電機需模擬發動機的抖動以及停轉來模擬發動機的熄火。
2.4行駛功能的模擬控制策略
從圖5中可知,傳統燃油發動機轉速與節氣門開度不是線性關系,行駛前汽車是怠速。剛開始加速(節氣門開度小于10%)時,發動機轉速變化不大;當節氣門開度大于50%時,發動機接近最高轉速;節氣門開度在10%~50%之間時,發動機轉速變化很大。
本文電動教練車的加速踏板開度應與電機控制器輸出的PWM波有一定對應關系(隨動)。為使電機的轉速與燃油發動機轉速相似,在發動機轉速—節氣門開度的關系中擬合一條電機轉速—加速踏板開度之間的曲線關系。
3電機模擬發動機控制策略的軟件實現
3.1電機控制器的通信方式
本文的電機控制器采用CAN總線與整車通信,如圖6所示。
電機控制器從總線上接收到的信號主要有點火開關位置、離合器位置以及擋位信號等。電機控制器發送到總線上的信號主要有油門踏板位置、電機溫度、電機控制器溫度以及電機電流信號等。發送的信號都是周期信號,周期為20ms,字節格式采用Motorola格式。
3.2軟件開發
傳統的手工編程很難應對多達數千行的電機控制代碼,會拉長開發周期,增加開發成本,且難以保證軟件的可靠性,已不能適應軟件開發的要求[15]。
本文采用軟件開發V流程,如圖7所示,有效提高了軟件算法的可靠性,縮短了開發時間[16]。
3.2.1模型搭建
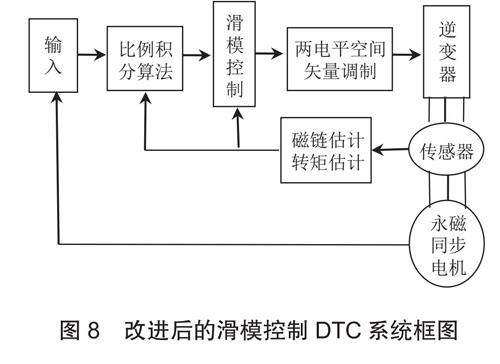
本文選用MATLAB/Simulink進行模型開發,電機控制算法選用基于滑模控制的直接轉矩控制算法,該算法有很好的動態性能和抗干擾能力[17],以經典的基于滑模控制的直接轉矩控制算法為原型算法,在其基礎上添加了磁鏈估計和轉矩估計,用基于滑模控制的磁鏈與轉矩控制器來代替傳統的滯環控制器,再結合兩電平空間矢量調制,可使得轉矩波動幅度更小,改進后的滑模控制直接轉矩控制算法如圖8所示。
3.2.2快速控制原型
本文中快速控制原型的硬件工具采用dSPACE公司MicroAutoBOxII1511,通過實時接口(realtimeinterface,RTI)實現1511與MATLAB/Simulink連接;通用模塊化實驗軟件采用dSPACE公司的ControlDesk,它具有控制模型實時仿真與算法在線修正的功能,實現了電機模擬發動機軟件的快速開發[18]。
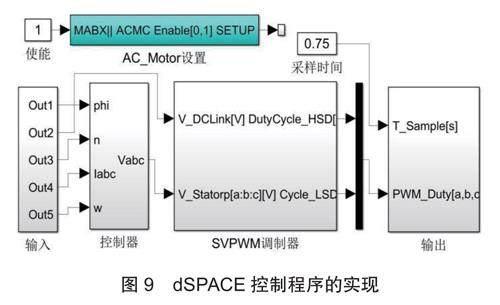
電機模擬發動機軟件算法的仿真,只需保留搭建的Simulink控制模型(圖9灰色框圖),用實時接口(RTI)模塊(圖9綠色框圖)替換原來的I/O接口[19]即可,如圖9所示。
3.2.3自動代碼生成
本文采用的自動代碼生成工具是dSPACE公司的TargetLink,它可從MATLAB?/Simulink?模型自動生成產品級的代碼[20],支持AUTOSAR標準。
3.2.4硬件在環測試
軟件算法離線仿真和在線測試驗證后,需進行半實物硬件在環仿真,硬件設備由HPZBook工作站、上位機軟件ControlDesk、快速控制原型MicroAutoBOxII、電機驅動器以及永磁同步電機、位置/轉速傳感器、示波器等組成,如圖10所示。
ControlDesk運行在HPZBook上,通過RTI連接并將模型算法下載到MicroAutoBOxII1511中,用ControlDesk來實時監控軟件的運行;1511給電機驅動器發送PWM控制信號,同時收到電機驅動器反饋的溫度、電流、故障、電壓以及電機反饋的轉速和扭矩等信號,整個過程驅動器的供電由動力電池提供高壓直流電,逆變器將其變成三相交流電來驅動電機。
3.2.5在線標定
借助硬件在環試驗環境,使用ControlDesk可實時監控電機模擬發動機的軟件運行,并可在線修改和標定參數,通過繪制的曲線和記錄的仿真數據可對軟件進行優化[21]。
4測試驗證
4.1整車系統與采集設備
基于圖1的整車架構,設計的C1電動教練車由奇瑞定制生產。
整車運行數據采集設備如圖11所示,硬件設備是ValueCAN4、配套軟件是VehicleSpy3,該采集設備由美國英特佩斯公司生產,通過DB9toOBDII轉接線,一端與教練車相連,一端與電腦相連,可實時記錄車速、發動機的轉速等信息,在一定的采集樣本條件下測量誤差小于0.2%。
4.2C1科目二與科目三路測試驗
本文設計的C1電動教練車在石家莊某駕校考試場完成了科目二與科目三的試驗,主要項目為怠速、半坡起步、直角與S彎,側方停車與倒車入庫以及科目三的路考試驗。
4.2.1怠速試驗
燃油教練車在啟動發動機時由于異步噴油會使得發動機轉速在很短時間內上升到1100~1400r/min,研究的電機模擬發動機控制策略要求與燃油車一致,從圖12中可以看出:0~2s內本策略與燃油發動機的增長趨勢一致,電機最高轉速低于發動機100~200r/min,這樣設計可節省怠速階段的能耗;2~300s內發動機由于冷卻液溫度原因其轉速先緩降再陡降,而電機定子與轉子無摩擦,無需暖機,故電機轉速是接近線性下降的;60s后逐漸趨于怠速穩定狀態。本文提出的控制策略成功模擬了發動機的性能,能完成車輛的啟動與怠速項目,在滿足教練車的怠速要求的前提下,還保證了能耗最低。
4.2.2半坡起步試驗
在半坡起步項目中要求教練車能在坡度≥10%且坡長≥30m的坡道上完成起步,本文C1電動教練車可在坡度15%且坡長35m的坡道上定點停車和再次起步。從圖13可看出,起步過程電機轉速與車速上升速度都比發動機要快且車輛加速穩定、無明顯抖動,說明本文設計的控制策略可以滿足教練車的起步要求,能完成車輛的半坡起步項目。
4.2.3直角與S彎試驗
在S彎與直角項目中要求教練車可蠕行前進且不熄火,從圖14可看出,使用本文控制策略的電動教練車在整個S彎與直角項目測試過程中車速變化趨勢與燃油教練車一致,車輛操控穩定性明顯優于燃油教練車且車速變化幅度更小,車輛不容易熄火,有利于新手學員練車。
4.2.4側方停車與倒車入庫試驗
在側方停車和倒車入庫項目中要求教練車可倒向行駛,從圖15可看出,使用本文控制策略的電動教練車在側方停車與倒車入庫項目測試過程中車速變化幅度更小,無明顯抖動,與燃油教練車操控體驗是一致的。
4.2.5科目三的快速直線行駛試驗
快速直線行駛試驗時,先平路起步,通過加減擋,掛到5擋后行駛,加速踏板開度初始值是0%,15s后加速踏板開度增加至100%,35s的采集時間內電動教練車車速變化范圍為30.6~120km/h,燃油教練車車速變化范圍為26~128km/h。
從圖16可看出,本文設計的控制策略使得電機的加速比發動機快,與燃油教練車的車速變化趨勢一致,表明本文設計的電機控制策略可實現對燃油教練車變速功能的模擬。
4結論
針對駕校教練車電動化升級需求,面向C1駕考平臺,圍繞電機實現發動機操控體驗的使用目標,設計了C1電動教練車動力系統,探索了電機模擬發動機操控的控制策略,基于軟件開發的V模式,探索并實現了電機模擬發動機的軟件算法。
基于改進后的電機控制策略軟件模型和改進后的基于滑模控制的直接轉矩控制算法,進行了仿真與標定;將設計的動力系統與控制策略軟件裝載到奇瑞凱翼車上,在石家莊某駕校對其進行了與燃油教練車的對比試驗,結果表明通過分析與燃油教練車的對比試驗數據,本研究中設計的控制策略成功模擬了發動機的性能;怠速時電機轉速與車速上升速度都比發動機要快,但電機最高轉速比發動機低100~200r/min,節省了能耗;起步時車輛加速穩定、無明顯抖動,轉速上電機比發動機快0.5s,提高了動力性能;直角、S彎、側方停車、倒車入庫以及科三項目時,車輛操控穩定性明顯優于燃油教練車且車速變化幅度更小,與燃油教練車的操控體驗基本一致,能較好地實現實車量產和批量應用。試驗結果驗證了本文設計的動力系統及其控制策略的技術可行性,對今后C1電動教練車的研發具有指導性的意義。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36