智能移動機器人控制技術改造升級探索
2023-04-29 13:35:02謝小寶
中國科技投資 2023年16期
謝小寶
摘要:智能移動機器人是一種能在復雜環境下自主工作、動態決策與自主規劃、行為控制與執行的綜合控制系統,是現代工業智能控制技術發展前沿,有利于推動未來生產生活方式變革。基于此,本文主要分析智能移動機器人技術當前的發展現狀、升級改造策略以及未來的發展趨勢,旨在推動智能移動機器人控制技術升級和發展,以供參考。
關鍵詞:智能機器人;體系結構;升級改造
一、智能移動機器人的概述
二十世紀六十年代,針對機器人開展的現代化研究已經出現,但由于時代的局限性,當時機器人研究的目標主要是使機器人滿足相應的科技要求,例如,指認性功能技術控制,需要機器人在智能識別系統的基礎上,辨別相應的對象類型,并根據系統所規劃的工作路徑,完成較簡單的推理和分析工作。如今,智能移動機器人技術的核心支撐主要包括智能機器人移動路徑的規劃、行為的控制,與機器人信號傳輸的信息技術等。
二、智能移動機器人的現狀
據文獻資料數據預測研究顯示,智能移動機器人在未來很可能會朝著高智能機器人、情感連接機器人以及視覺導向機器人的方向發展。當前,智能移動機器人應用并沒有得到普及,多數數字弱勢群體對機器人的工作體系以及構成結構知之甚少,甚至認為智能移動機器人只是智能家居中的構成部分,例如,智能電視機或智能機器掃地機等。實際上,傳統智能移動機器人領域早已在我國的科技領域、農業領域和工業生產領域等多個方面得以應用,智能移動機器人的融入和應用可以提升生產效率和工作水平。但隨著科學技術不斷發展,生產控制技術節奏的加快,傳統的智能移動機器人已經不能很好地滿足現代化工業生產作業。因此,需要借助進一步升級和改造技術,以此提升智能移動機器人工作過程中的智能性,推動我國現代化發展。
三、智能移動機器人體系結構
隨著工業控制技術不斷發展,各行業對機器人的應用需求日益增加。因此,需要進一步優化和升級傳統機器人的內部構架應用技術,經歷了半個多世紀的研究,機器人控制技術逐步走向成熟,成為現代工業控制技術核心發展產業之一。當前,機器人的研究目的是滿足日常生產生活中更多的執行需求,而智能移動機器人主要包括分級遞階結構機器人、包容結構機器人和混合結構機器人三種類型。
(一)分級遞階結構機器人
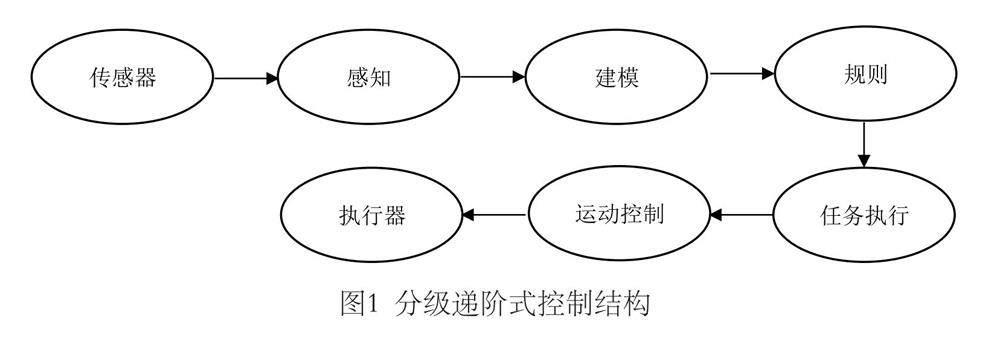
分級遞階結構是智能移動機器人在發展初期階段的一種基本結構系統,遵循“感知—思維—行動”的基本規律,即層次向上,智能增加,精度降低;層次下降,智能降低。在早期的機器人創造和生產過程中,這種機器人系統較為常見,分級結構可以對機器人的大腦發出較簡潔且容易辨別的指令,如圖1所示。隨著科技的進步和變遷,傳統的機器人系統無法滿足現代人類社會多功能的需求,由此,分級結構也必須要不斷優化和升級,并拓展新的領域和功能。分級結構機器人構架的前期排序工作中周期長,且設置控制技術繁瑣,機器人的工作效率提升有限。
圖1 ?分級遞階式控制結構
(二)包容結構機器人
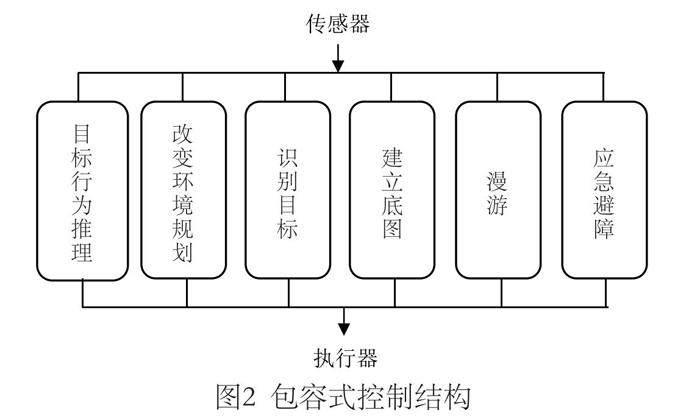
包容結構機器人是智能移動機器人處理動態環境不確定和在模仿動物的低級反射反行為,與分級遞階結構的機器人構造相比,包容結構的機器人體現出的功能更加多元,如圖2所示。包容結構機器人是分級遞階機器人的延伸和發展,能使機器人的操作功能和執行功能同步實現,適合快速反射行為,在路線規劃、目標識別控制技術較好,且前期排序的時間較短,工作效率高,能識別較復雜的工作命令,但在功能規劃和構架方面缺少全局指導和防調。
圖2 ?包容式控制結構
(三)混合結構機器人
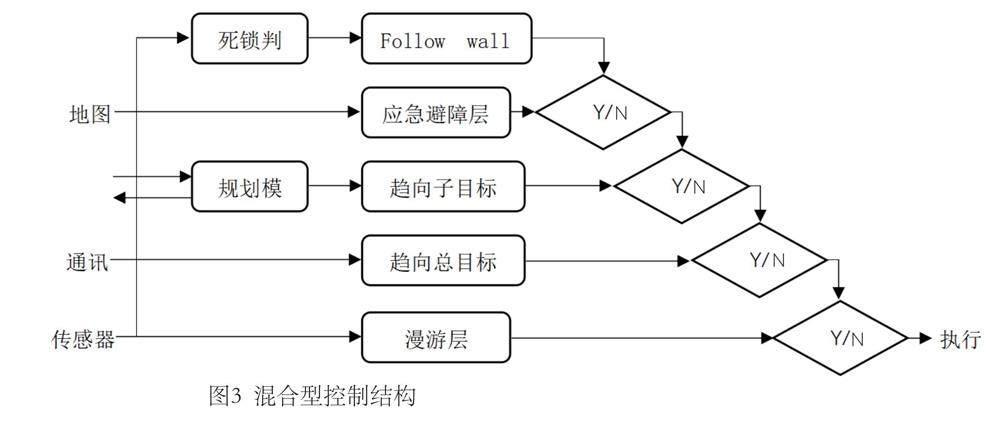
混合結構機器人是分級遞階結構和包容結構相互融合的機器人系統,客觀上,可以被視為一個相對獨立的操作系統。從功能結構上混合結構的機器人漫游層、規劃層、趨向總目標層、應急避障層和解死層,從下到上,越高層,優先級越高,如圖3所示。因此,混合結構的機器人相比于分級遞階結構和包容結構的機器人體現的功能操作更具優勢。它采用目前較先進的處理技術,能幫助機器人識別各類型操作任務,并執行一系列的動態操作。需要注意的是,分級遞階結構和包容結構相互混合的機器人構造是一個獨立存在的處理系統,是總體反應構架中的重要構成部分,也是反應結構機器人持續發展和延伸后誕生的產物。
圖3 ?混合型控制結構
四、智能移動機器人中的重要技術構成
(一)路徑規劃技術
智能移動機器人是基于路徑規劃技術的發展,在多種可以被選擇的路徑方案中擇優挑選出一條較便捷的途徑。路徑規劃技術誕生于二十世紀七十年代,當前國內外對路徑規劃技術研究較活躍,不過,在機器人領域中的應用不夠完善,尤其是考慮到對于不同工作需求的智能機器人,在工作過程中對路徑規劃和選擇的需求差異性較大,常見的有環境信息已知局部路徑規劃、環境信息不完全和未知路徑規劃技術。因此,智能移動機器人應用發展領域在控制技術中較重要,需要從通觀全局的角度上選擇一條更好的路徑。
(二)多傳感器信息融合技術
多傳感器信息融合技術控制是利用多個傳感器合理支配和使用觀測信息,控制性能穩定,是智能移動機器人控制技術較關鍵的構成部分。其中,信息融合主要是能在面臨不同的外界環境下,通過微型傳感器設備快速抓取周邊環境中的信息數據,并整合和深度處理,再根據周邊環境的需求展示數據。由于智能移動機器人的應用場所具有較大差異,應用周圍環境和資源較復雜。因此,通過傳感器技術的數據抓取以及深度處理工作,實現對各類型數據信息的分類和總和,能更精準地針對周圍環境的特征作出反應并執行命令。
(三)導航技術
導航技術是在智能移動機器人領域占據主導位置的重要技術。對于智能移動機器人而言,智能移動機器人在不同的場合下進行動態性的工作,能辨別位置方向并找出路徑規劃技術,是智能移動機器人應用價值的關鍵。因此,導航技術是智能移動機器人中較核心的應用技術。智能移動機器人導航技術常見有慣性導航、GPS導航、環境地圖模型匹配導航、路標導航、視覺導航等,在智能移動機器人領域的應用中,智能移動機器人在自主操作和識別的過程中學會選擇合適的行走規劃路徑,面臨前方障礙物時能自動識別。因此,導航技術賦予了智能移動機器人感知能力,可以辨別和確認周邊環境中存在的可能危及前行路線的障礙,進一步與路徑規劃技術融合,有效躲避障礙物。
五、智能移動機器人技術的升級與改造
(一)主動視覺技術的升級改造
主動視覺技術是視覺導航系統較主要的控制技術,是當前智能移動機器人研究領域中的重點研究技術,主要解決障礙物和路標的探測及識別,利用視覺探測路標完成智能移動機器人導航。智能移動機器人能根據當前周圍環境中所處的狀態,例如,幾何位置、姿態、攝像機的成像光學條件等問題,調整各個控制部分的參數,使其達到較佳的成像狀態,優化系統完成特定的視覺任務。在智能移動機器人控制技術升級和改造的過程中,可以通過融入主動視覺技術,進一步提升機器人對周圍環境的識別能力和反應能力,尤其是精準辨別光線、位置、圖像條件,從而進一步提升智能移動機器人操作執行過程中的安全性以及靈活調整工作狀態,提升任務完成的精確度。主動視覺系統的構成,需要通過圖像采集平臺的大規模利用以及自主狀態調節技術的應用,有效提升智能移動機器人快速辨別周圍環境信息的能力。這項技術需要予以大量的數據存儲以及圖像識別技術,并以高速運轉的計算速度為前提條件,才能在短時間內對周圍環境作出反應。因此,依托主動視覺技術是智能移動機器人未來控制重點研究技術,完善智能移動機器人的執行能力,更好地掌握周邊環境的各項細節信息,使其更精準地完成任務。
(二)超聲波測速技術的應用
超聲波技術是智能移動機器人機械振蕩領域中的重要組成部分,超聲波在傳遞和反彈的過程中具有彈性介質的特征,超聲波傳遞速度快,達到了光波傳遞速度的百萬分之一,且在傳遞過程中,尤其在縱向方向分辨率較高,即使在充滿障礙物的煙塵條件下或光線視角不好的黑暗環境中仍可以實現對物質測量結果的有效反彈,在各個領域中都得到了廣泛應用。但超聲波技術在應用的過程中對色彩、光線以及電磁元素感應不敏感,但該技術可以在視角不足和特殊環境下精準運行,具有抗干擾能力強的特征。因此,智能移動機器人的優化和升級中超聲波測速技術融入和應用是必然。通過超聲波測速技術能增加前方物體聲波反饋功率,借助能量轉換器在空氣中對超聲波進行輸出控制,如果智能移動機器人運行過程中的周圍環境出現障礙物,超聲波會在短時間內完成超聲波反射,進而被機器人的智能轉換器接受,快速測算與障礙物之間的實際距離,提升機器人對前方障礙物測距的精準度。
(三)基礎行為控制技術的升級
智能移動機器人基礎行為控制技術基于反應式系統的進一步升級和優化,主要包括反應式結構以及慎思結構兩部分。其中,反應式結構的控制系統主要是指智能移動機器人無法根據周圍環境所處的狀況做出自我思維活動,只能根據控制系統提出的命令執行動作。而基于基礎行為控制系統是反映系統的進一步優化和升級,許多研究學者早已開始基于行為控制方式對智能移動機器人的行為控制優化展開了研究。著名機器人研究專家Maja Matatic和他的團隊認為,基于行為控制方法的機器人是工程機器人與人工智能機器人之間相互銜接的重要橋梁,通過行為方法進行研究,可促使智能移動機器人不斷朝著智能體發展方向發展。在當前的智能移動機器人研究工作中,可以通過機器人預先設定好相應的移動框架,借助相應的約束條件,精準操控機器人。除此之外,行為控制方法對智能移動機器人展開的研究甚至還涉及生物靈感應用,也就是說,借助生物對外界環境的天然感應為機器人未來功能執行和路徑規劃提供了更大的自由空間。Maja Matatic和他的團隊認為控制智能機器人系統功能的實現,必須建立在行為方法理論的基礎上,為了推動機器人向更智能和靈活的方向發展,需要鼓勵建設智能移動機器人技術孵化平臺,致力于研究集基礎技術研發、智能移動機器人技術孵化、產業培育為一體的協同創新平臺,使機器人在識別和操作過程中能具備一定的自主思考空間,提升智能移動機器人在執行命令過程中的穩定性與精準性。
六、結語
綜上所述,隨著科學技術快速發展,智能移動機器人已逐步開始在不同的發展領域展現自身實力。在推動智能移動機器人的進一步優化和升級方面,要從智能移動機器人的控制系統、視覺系統以及聲波系統等多個方面進行升級與改造,優化智能系統設計,以推動智能移動機產業轉型升級與戰略性新興產業發展提供科技支撐,確保未來的智能移動機器人可以根據不同職能需求、不同環境領域和不同行業要素為人類提供更加高效、更加便捷的服務。
參考文獻:
[1]馬義博,王敬一,馬龍,等.基于PRM算法的智能移動機器人的路徑規劃問題研究[J].電子世界,2020(07):85-86.
[2]蔣江紅,張鍥石.基于SLAM技術的雙控制器智能機器人[J].計算機技術與發展,2020,30(06):40-43.
[3]高沖.智能移動機器人技術現狀以及開發研究[J].信息與電腦,2019(06):130-131.
[4]莊紅軍,李克明,楊永謙,等.智能控制及移動機器人研究中的問題分析[J].無線互聯科技,2021,18(02):97-98.
[5]張燕.基于模糊控制的智能移動機器人最優避障路線生成系統[J].機械設計與制造工程,2022,51(04):86-90.
[6]白巖峰.基于動態窗口法的機器人腦機控制方法研究[J].天津化工,2022,36(01):76-78.
