風送式集中排肥系統的設計與試驗
2023-05-11 02:20:14鄭明武李芋汶楊正穎鄒洪宇郭金岳任萬軍胡劍鋒雷小龍
中國農業大學學報 2023年6期
關鍵詞:作業
李 陶 龔 靜 鄭明武 李芋汶 楊正穎 鄒洪宇 郭金岳 鄧 璇 任萬軍 胡劍鋒 雷小龍,*
(1.四川農業大學 機電學院,四川 雅安 625014;2.四川農業大學 作物生理生態及栽培四川省重點實驗室,成都 611130;3.四川天府新區鄉村振興研究院,成都610213)
化肥是重要的農業生產資料,施用化肥已成為許多國家提高糧食產量的重要手段之一[1-2]。施肥作業過程存在施用量大且分布不均勻,造成環境污染、化肥利用率低等問題,嚴重制約了農業綠色可持續發展[3-5]。精量同步施肥是降低化肥施用量和提高化肥利用率的重要途徑,設計性能優良的排肥裝置與控制系統是保證排肥精確的關鍵[6]。
外槽輪式排肥器具有結構簡單、成本低廉和維護方便等優點,是國內外廣泛應用的施肥裝置[7]。為實現精量、均勻排肥,已有研究采用優化設計外槽輪排肥器結構或提升控制系統性能的方式來實現[8-11]。針輥式排肥輪通過增加排肥輪轉速可以提高排肥量均勻性[12];雙齒輪結構的排肥器提高排肥均勻性,并通過調節排肥輪的轉速精確調整排肥量[13];以交錯直齒式排肥輪為供肥關鍵部件與氣力輸送分配相結合,滿足施肥量要求且具備較好的均勻性[14];傾斜螺旋狀型孔結構有利于充肥和排肥,具有較好的各行排肥量一致性和排肥均勻度[15-16]。長江中下游地區土壤含水率高,地輪驅動施肥適應性較差,一般采用主動施肥方式,需設計施肥量隨前進速度變化而自動調整的同步施肥控制系統[17-18]。為實現與作業速度同步實時控制施肥量,Alameen等[19]設計的雙變量施肥試驗臺,可以通過氣缸調節排肥器開度,精準、穩定并快速地控制排肥量;基于CAN總線通訊技術與GNSS系統設計了雙變量施肥控制系統,利用GNSS系統獲取準確定位信息,并通過電機與推桿實時同步控制施肥量,可實現精準變量的施肥作業[20];趙學觀等[21]提出北斗單點測速與地輪測速結合的雙測速模式,提高了玉米追肥機控制系統的測速精度和可靠性。綜上,通過優化排肥器結構可提高排肥精確度和均勻性,GPS系統應用于施肥控制系統可實現同步控制施肥量,但排肥均勻性和準確度需進一步研究。
本研究擬設計一種采用“集中排肥+風送輸肥”方式的風送式集中排肥裝置,并開發同步施肥控制系統;設計直槽、交錯槽與螺旋槽排肥輪,通過臺架試驗優選排肥輪;建立風送式集中排肥裝置的排肥輪轉速-排肥速率線性回歸方程模型,根據北斗+GPS系統監測的行駛速度實時調節施肥量,以期為排肥系統設計與性能提升提供參考。
1 風送式集中排肥系統結構與工作原理
1.1 風送式集中排肥系統結構
本研究所設計的風送式集中排肥系統由排肥裝置、風送輸肥裝置和施肥控制系統組成(圖1),其中排肥裝置包括肥料箱、外殼、電機、排肥輪、攪肥軸和平口排肥舌等;風送輸肥裝置主要由風機、導肥管和輸肥管組成;施肥控制系統的觸摸屏、北斗+GPS測速模塊等接入控制器。排肥裝置的排肥輪與空白輪交錯排列安裝排肥軸上,排肥輪與排肥支撐座體之間形成一個獨立區域,攪肥軸位于排肥輪側上方,電機驅動攪肥軸、排肥軸轉動,促進顆粒化肥流動性,排肥輪轉動帶動并在平口排肥舌共同作用下強制排肥到氣固混合腔。風送輸肥裝置采用6個風機為氣固混合腔分別提供風力,實現6行輸送排肥。施肥控制系統通過北斗+GPS測速模塊檢測作業速度,并控制電機轉速,從而實現同步排肥。
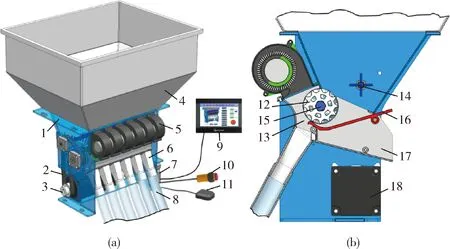
1.外殼;2.同步齒形帶;3.同步輪;4.肥料箱;5.風機;6.導肥管;7.控制器;8.輸肥管;9.觸摸屏;10.柱形光電開關;11.北斗+GPS測速模塊;12.排肥輪;13.氣固混合腔;14.攪肥軸;15.排肥軸;16.平口排肥舌;17.排肥支撐座體;18.電機1.Shell;2.Belt;3.Synchronized wheel;4.Fertilizer box;5.Fan;6.Fertilizer guiding tube;7.Controller;8.Fertilizer tube;9.Display screen;10.Cylindrical photoelectric switch;11.BDS and GPS speed measurement module;12.Fertilization wheel;13.Gas-solid mixing chamber;14.Fertilizer mixing shaft;15.Fertilization shaft;16.Flat tongue;17.Fertilizer support base;18.Motor圖1 風送式集中排肥系統三維圖(a)和截面圖(b)Fig.1 Three-dimensional view (a) and section (b) of air-assisted centralized fertilization system
1.2 工作原理
風送式集中排肥系統工作時,啟動施肥控制系統,校準排肥量后在觸摸屏上設定施肥量、作業幅寬等參數,啟動風機,農機的動力機械抬升臂放下觸發柱形光電開關傳感器,排肥電機轉速根據北斗+GPS測速模塊測量的作業速度進行調節。電機驅動排肥輪與攪肥軸轉動,顆粒化肥在攪肥軸與重力的作用下進入到排肥輪凹槽內,通過排肥輪轉動強制排入氣固混合腔,風送輸肥裝置利用高速氣流在氣固混合腔產生文丘里效應,顆粒化肥在氣流與重力的作用下輸送至輸肥管道,完成排肥過程。
2 關鍵部件設計
2.1 排肥輪設計
集中排肥裝置的關鍵部件是排肥輪,為提高排肥均勻性,降低排肥脈動現象,設計螺旋槽排肥輪結構參數,并與直槽、交錯槽排肥輪進行對比試驗。由排肥器工作原理可知,集中排肥裝置單個排肥輪每轉的排肥量Q0是強制層排肥量Q1與帶動層排肥量Q2之和[22-24]:
Q0=Q1+Q2
(1)
其中
(2)
式中:Q0為單個排肥輪每轉的排肥量,g/r;α為凹槽內顆粒化肥的填充系數,本研究取0.8;Z為排肥輪每周槽數,個;l為排肥輪有效工作長度,mm;γ為顆粒化肥容重,kg/m3;S為單個凹槽截面積,mm2;R為排肥輪半徑,mm;λ為帶動層的特性系數,本研究取0.3。
本研究設計的螺旋槽排肥輪為圓弧形凹槽。螺旋槽排肥輪的端面局部和回轉面投影見圖2。

O0為排肥輪的軸心;O1為凹槽的軸心,且在排肥輪圓周上;r為凹槽半徑;A與B點為凹槽在排肥輪圓周上的截面起始、終止點;θ為單個凹槽在排肥輪上的圓心角;R為排肥輪半徑;l為排肥輪的有效工作長度;ψ為螺旋凹槽在排肥輪圓周上的螺旋升角。O0 is the axis of fertilizing wheel.O1 is the axis of the groove and on the circumference of the fertilizer discharge wheel.r is the groove radius.Points A and B are the starting and ending points of the section of the groove on the circumference of the fertilizer discharge wheel.θ is the central angle of a single groove on the fertilizer row wheel.R is the radius of fertilizer discharge wheel.l is the effective working length of fertilizer discharge wheel.ψ is the spiral rising angle of the spiral groove on the circumference of the fertilizer discharge wheel.圖2 螺旋槽排肥輪的端面局部視圖(a)和回轉面投影(b)Fig.2 Partial view of end face (a) and rotary surface projection (b) of spiral groove fertilizer wheel
由圖2(a)可知,排肥輪單個凹槽截面積S為扇形O0AB面積S1與三角形O0AB面積S2的差加上扇形O1AB面積S3與三角形O1AB面積S4的差:
S=S1-S2+S3-S4
(3)
其中
(4)
式中:S為單個凹槽截面積,mm2;r為凹槽半徑,mm;θ為單個凹槽在排肥輪上的圓心角,(°)。
為保證螺旋槽排肥輪相鄰兩凹槽首尾相接,螺旋升角ψ應滿足:
(5)
集中排肥裝置的供肥速率Qm與農藝要求的施肥速率Qs分別為:
Qm=Q0Nn
(6)
Qs=6QtMv
(7)
式中:Qm為集中排肥裝置的供肥速率,g/min;Qs為農藝要求的施肥速率,g/min;Qt為農藝要求的單位面積理論施肥量,kg/hm2;N為排肥輪數量,個;n為排肥輪轉速,r/min;M為施肥作業幅寬,m;v為施肥作業速度,m/s。
由式(6)和(7)可知,集中排肥裝置的供肥速率Qm與農藝要求的施肥速率Qs相等,則:
(8)
綜上,供肥速率與排肥輪直徑、槽數、凹槽容積和轉速密切相關。當供肥速率相同時,排肥輪槽數隨著直徑的減小而減少,排肥均勻性變差,為滿足施肥量的調節范圍,通過改變排肥輪轉速調節排肥速率,但排肥輪轉速過高會降低充肥時間,顆粒化肥無法及時充滿凹槽,影響排肥性能[22-24]。根據農藝施肥量及排肥性能要求,確定直槽、交錯槽和螺旋槽排肥輪的直徑為60 mm,圓弧形凹槽半徑為6 mm,排肥輪有效工作長度為30 mm,在保證槽輪齒脊強度與排肥均勻性的條件下,槽數為8~15,本研究取槽數為12個;螺旋槽與直槽、交錯槽排肥輪區別在凹槽排布(圖3),螺旋槽排肥輪的凹槽呈螺旋排布,螺旋升角為62.4°,直槽排肥輪的軸心線與凹槽軸心線平行,交錯槽排肥輪左右凹槽交錯0.5個周期。
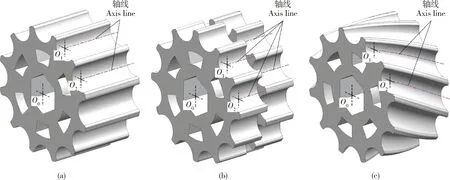
O0為排肥輪的軸心;O1為凹槽的軸心;O2為相鄰凹槽的軸心。O0 is the axis of fertilizing wheel.O1 is the axis of the groove.O2 is the axis of adjacent grooves.圖3 直槽(a)、交錯槽(b)和螺旋槽(c)排肥輪Fig.3 Straight groove (a),staggered groove (b) and spiral groove (c) fertilization wheel
2.2 風送輸肥系統設計
風送輸肥系統主要參數設計包括輸送氣流速度、輸送風量、輸送管內徑和風機的選型。輸肥管內輸送氣流速度vs的計算公式[25]為:
(9)
式中:vs為輸肥管內輸送氣流速度,m/s;kp為顆粒尺寸系數,一般為16~20;ρp為顆粒密度,kg/m3;kd為顆粒性質系數,一般為2×10-5~5×10-5;L為輸肥管長度,m。
化肥的顆粒直徑一般為2~4 mm,顆粒化肥的密度為900~1 400 kg/m3,輸肥管長度約2 m,顆粒性質系數對輸送氣流速度影響甚微,忽略不計;氣流速度為滿足多數顆粒化肥的使用,根據化肥的最大顆粒直徑和最大化肥密度,取顆粒尺寸系數為16,化肥密度取1 400 kg/m3,則輸肥管內輸送氣流速度理論值為18.93 m/s;考慮到田間作業工況惡劣,實際輸肥管內輸送氣流速度應達到21 m/s。長江流域油菜等作物播種的作業速度一般為3~5 km/h,作業幅寬1.8 m,按照作業效率0.9 hm2/h,施肥量按照600 kg/hm2計算,輸肥系統輸送率W為540 kg/h。為保證顆粒化肥在輸肥管路中順利輸送而不被堵塞,選定單位時間肥料質量與氣流質量的混合比c為1.2[26],表達式為:
(10)
其中:
(11)
式中:Gp為輸肥管內肥料流量,kg/h;Gs為輸肥管內空氣流量,kg/h;W為輸肥系統輸送率,kg/h;ρs為空氣密度,取1.2 kg/m3;d0為輸肥管內徑,mm。
根據式(11)可知,輸肥管內徑d0和輸送流量Qs分別為:
(12)
(13)
由式(12)和(13)可知,選用32 mm內徑的輸肥管,風機輸送流量應大于375 m3/h,根據風送輸肥系統對風速與風量的要求,選用調速風機臺達BFB1012EH-F00,工作電壓DC12 V,額定功率36 W,風量78.2 m3/h,風送輸肥系統使用風機數量為6個。
2.3 同步施肥控制系統設計
2.3.1硬件設計
施肥控制系統依托動力機械的12 V直流電源,設有12~24 V的升壓器。采用TK6071IQ觸摸屏,該觸摸屏通過RS485與控制器串口通訊(圖4)。觸摸屏設置初始參數及校準后,作業機具放下時觸發安裝在機具抬升臂上的E3F-DS30C4柱形光電開關,進入工作狀態;北斗+GPS測速模塊獲取作業速度并傳輸至CX3G-16MT控制器(Coolmay公司),經過數據分析處理后發送脈沖信號至閉環步進電機驅動器,調整閉環步進電機(型號為86EBP147ALC-TK0)轉速帶動排肥輪工作,以實現同步控制排肥量,在排肥過程中,6個風機轉速隨排肥速率實時調整。施肥控制系統使用7個PU-FD5BL臥式光電開關,分別對肥料箱低余量、輸肥管堵塞進行監測,若在工作過程中,出現肥料箱缺肥、輸肥管堵塞和電機故障等意外狀況,將觸發報警信號并反饋至觸摸屏。施肥控制系統工作流程見圖5。
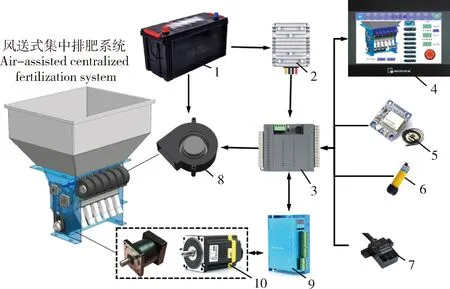
1.12 V直流電源;2.升壓器;3控制器;4.觸摸屏;5.北斗+GPS測速模塊;6.柱形光電開關;7.臥式光電開關;8.風機;9.閉環步進電機驅動器;10.閉環步進電機1.12 V DC power supply;2.Voltage booster;3.Controller;4.Touch screen;5.BDS+GPS speed measurement module;6.Column photoelectric switch;7.Horizontal photoelectric switch;8.Fan;9.Closed loop stepping motor driver;10.Closed loop stepping motor圖4 施肥控制系統原理及組成Fig.4 Principle and composition of fertilization control system
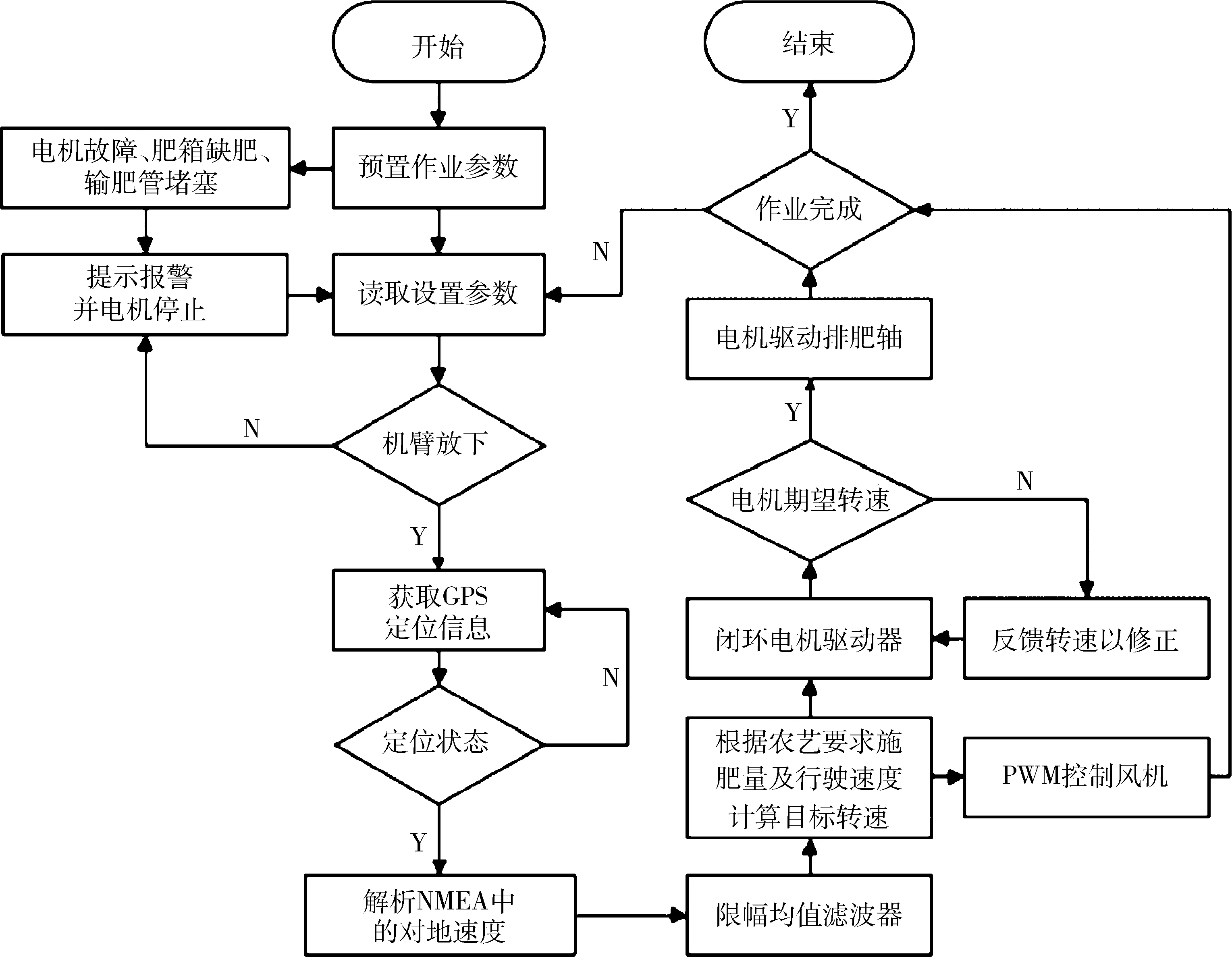
圖5 施肥控制系統工作流程Fig.5 Operating process of fertilization control system
2.3.2控制方法
施肥控制系統選用的北斗+GPS測速模塊型號是ATK1218-BD,通訊速率為20 Hz,對地速度精度<0.1 m/s。在田間作業過程中,北斗+GPS模塊獲取的原始對地速度有噪聲及異常信號,無法準確反映行駛速度。數字濾波算法是濾除噪聲干擾,提高測量精度的有效方法[27-28],因此綜合應用限幅濾波和遞推平均值濾波算法,以實現施肥控制系統對異常對地速度信號的抑制,消除瞬時波動影響,平滑速度信號,實現準確監測行駛速度。限幅濾波算法[29]為:
(14)
式中:Yk為本次限幅濾波后采集的速度最終值;Xk為當前速度采集值;Xk-1為上一時刻速度采集值;Ae為限幅濾波最大速度誤差值。由式(14)可知,若當前速度采集值與上一時刻速度采集值之差≤限幅濾波最大速度誤差值時,則當前速度采集值為本次采集的速度最終值;否則當前速度采集值被定義為異常信號,則將上一時刻速度采集值賦值到本次采集的速度最終值。采用型號為BWT901BLE5.0的加速度計測量平坦路面上作業時的加速度,獲得加速度峰值為4.64 m/s2,經換算后可用于限幅濾波最大速度誤差。當北斗+GPS模塊輸出的對地速度經過限幅濾波剔除異常信號后,進行遞推平均值濾波[30],表達式為:
(15)
式中:T為采樣個數,本研究取10;vm為第k次采集濾波后的速度輸出值,m/s。
由式(6)可知,集中排肥裝置的供肥速率Qm隨著排肥輪轉速n的增加而提高,且已有研究表明排肥速率與排肥輪轉速有良好的線性關系[15-16],則排肥速率與排肥輪轉速的線性函數表達式為:
Qm=Asn+Bi
(16)
式中:As為斜率;Bi為截距。
在施肥控制系統中,經濾波處理后的速度輸出值vm等于施肥作業速度v,即vm=v;且集中排肥裝置的供肥速率Qm應等于農藝要求的施肥速率Qs,則由式(7)與式(16)可知施肥控制系統的目標轉速為:
(17)
2.3.3人機交互界面
施肥控制系統通過TK6071IQ觸摸屏(WEINVIEW公司)進行人機交互,利用RS485串口通訊協議與控制器通訊,使用軟件EasyBuilder Pro設計了人機交互界面,包括初始設置和運行監測2個界面(圖6)。初始設置界面設置幅寬、單位面積理論施肥量,施肥控制系統引用校準值以適應不同的顆粒化肥。執行校準程序時,排肥電機以60 r/min的轉速運行10 s,將所排出肥料的總重量輸入至校準值中完成校準;運行監測頁面可對作業參數信息實時監測,當監測到運行故障時界面內指示燈閃爍報警提示。
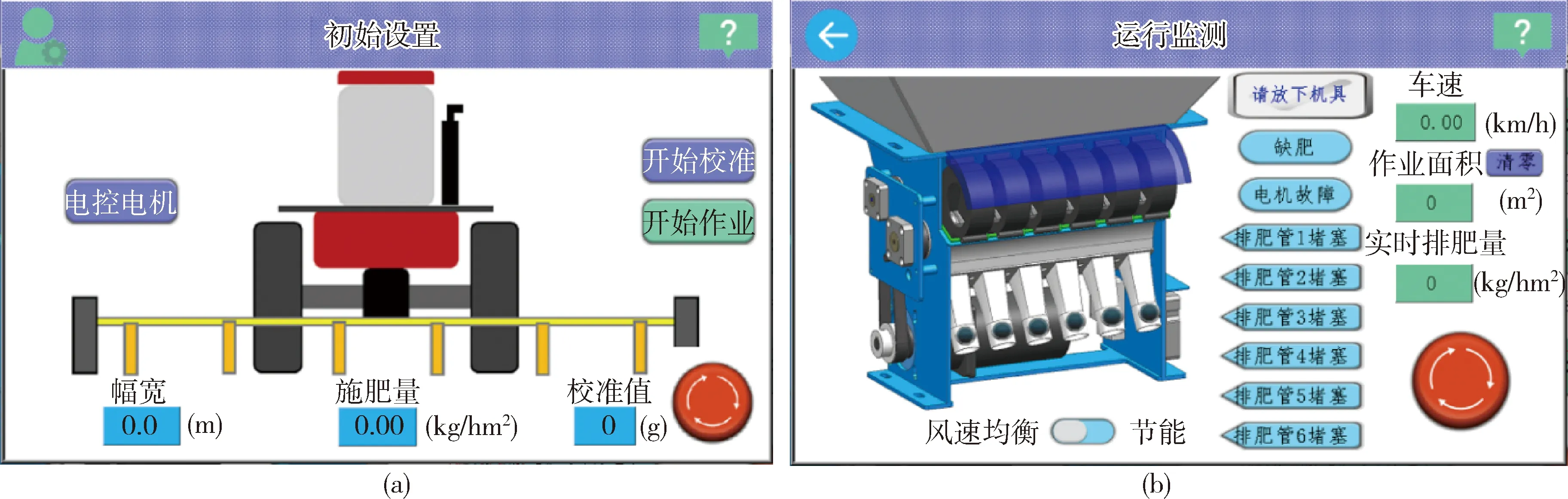
圖6 初始設置(a)和運行監測(b)的人機交互界面Fig.6 Initial setting (a) and operation monitoring (b) of HMI
3 性能試驗與分析
3.1 試驗材料及方法
3.1.1排肥裝置性能試驗
選用中化化肥為供試顆粒化肥,氮、磷、鉀質量比為15∶15∶15。參照NY/T 1003—2006《施肥機械質量評價技術規范》[31]開展臺架試驗,對比直槽、交錯槽和螺旋槽排肥輪的排肥性能,排肥性能評價指標包括各行排肥量一致性、排肥量穩定性與排肥量均勻性的變異系數。排肥輪轉速設置為10~60 r/min,增量為 10 r/min,試驗時間為60 s,重復5次,分別收集各排肥口的肥料進行稱重,并計算各行排肥量一致性與排肥量穩定性變異系數。采用具有RS232通訊口功能的電子秤對各排肥口進行動態稱重[32],電子秤的通訊速率為150~200 ms,實時記錄60 s的排肥流量變化,并綜合計算6行的總排肥量均勻性變異系數。
3.1.2控制系統性能試驗
為驗證施肥控制系統的性能利用排肥動態試驗臺架(圖7),開展施肥控制系統的施肥流量調整的響應時間、施肥量準確率試驗,并檢驗排肥系統對不同化肥的適應性。參照GB/T 35487—2017《變量施肥播種控制系統》[33]等相關實驗方法。選取中化化肥,設置排肥目標轉速為20、40和60 r/min,開展施肥流量調整的響應時間試驗,施肥控制系統從初始轉速0 r/min增至目標轉速,重復3次,獲取靜止狀態至理論施肥流量調整的響應時間;選取中化化肥開展施肥量準確率的田間試驗,并選取漢楓緩釋摻混肥料與美豐比利夫復合肥驗證風送式集中排肥系統適應性,其中漢楓和美豐肥料的氮、磷、鉀質量比分別為30∶6∶12、22∶9∶9,將風送式集中排肥裝置安裝于插秧機上,并在輸肥管口處設置收集容器,幅寬為1.8 m,作業速度保持在4~6 km/h行駛,依次設定施肥量為300、450和600 kg/hm2,行進20 m后停止排肥,重復3次并稱取排肥量。

1.肥料箱;2.數據采集端;3.可通訊電子秤;4.肥料收集容器;5.控制器;6.集中排肥裝置。1.Fertilizer box;2.Data acquisition terminal;3.Communicable electronic scale;4.Fertilizer collection container;5.Controller;6.Centralized fertilization device.圖7 排肥動態試驗臺架Fig.7 Dynamic test bench
3.2 結果及分析
3.2.1凹槽結構對排肥性能的影響
3種排肥輪結構的排肥輪轉速與排肥量擬合方程決定系數R2>0.999(圖8),表明排肥輪轉速與排肥速率呈良好的線性關系。
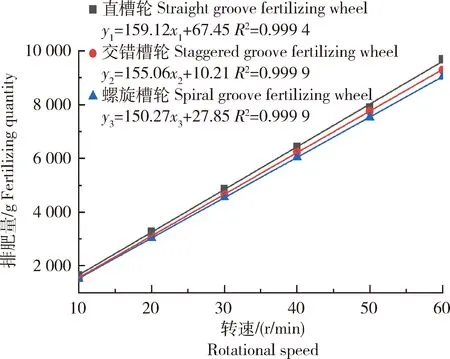
圖8 轉速與排肥量的關系Fig.8 Relationship between rotational speed and fertilizing quantity
排肥輪轉速為10~60 r/min時,隨著排肥輪轉速的增大,不同結構的排肥輪各行排肥量一致性變異系數均呈降低趨勢,各行排肥量一致性變異系數最大值為2.67%(圖9);相同轉速下,各行排肥量一致性變異系數關系總體表現為:交錯槽排肥輪<螺旋槽排肥輪<直槽排肥輪。各槽型排肥輪的排肥量穩定性變異系數趨勢穩定,變異系數均小于0.9%;直槽與交錯槽排肥輪在60 r/min下的排肥量穩定性變異系數有輕微上升趨勢。
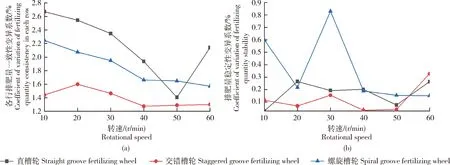
圖9 各排肥輪在不同轉速下的各行排肥量一致性(a)和排肥量穩定性(b)Fig.9 Consistency (a) and stability (b) of fertilization quantity of each row of fertilizing wheels at different rotational speeds
不同排肥輪結構的排肥量均勻性變異系數差異較小,總排肥量均勻性變異系數隨轉速的增加而降低(表1);螺旋槽排肥輪在各轉速下均有良好的均勻性能,排肥均勻性能表現為,螺旋槽>交錯槽>直槽。
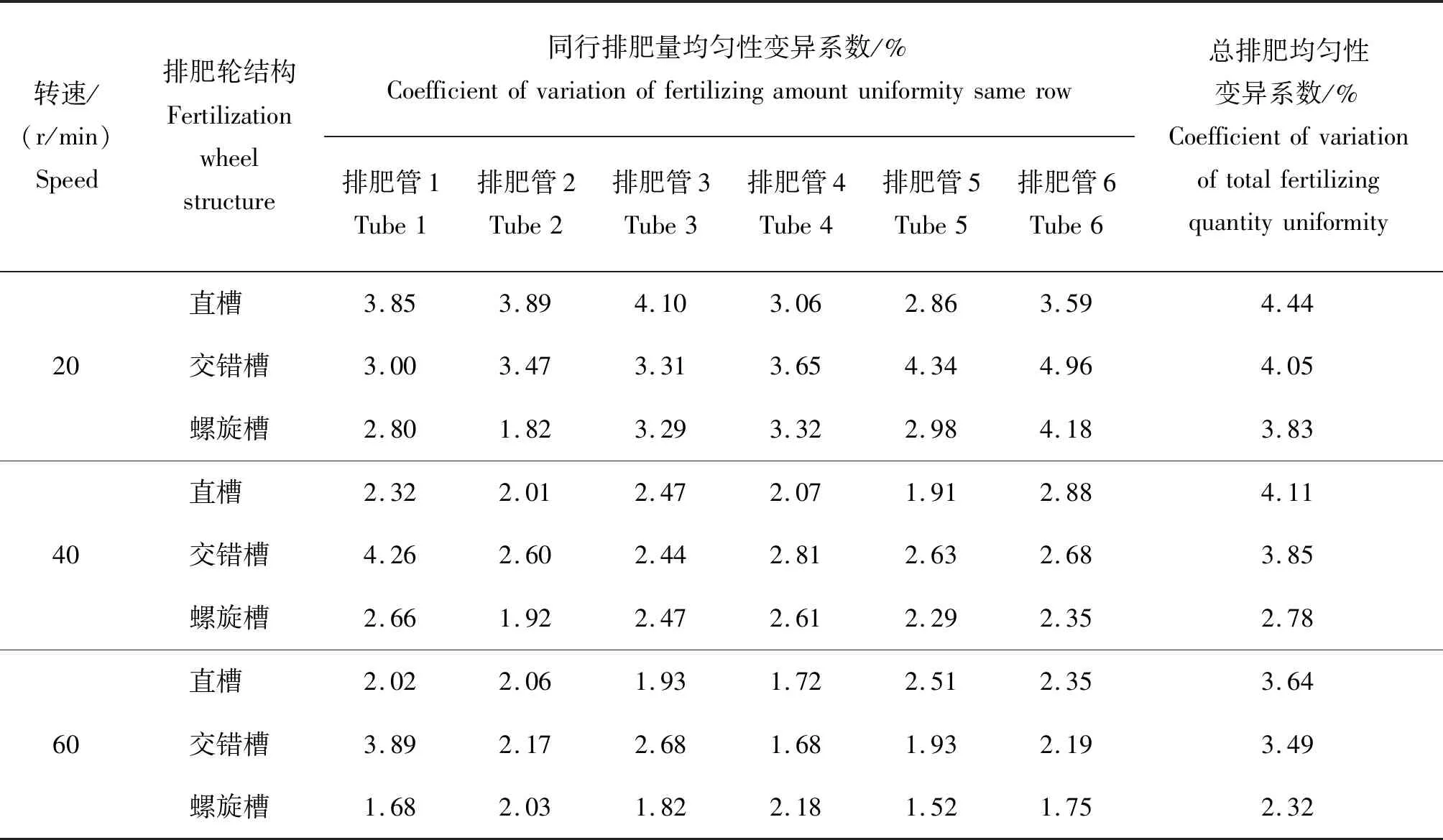
表1 不同排肥輪結構和轉速下的排肥均勻性能Table 1 Fertilization uniformity of different fertilization wheel structure and rotational speed
綜合評價各行排肥量一致性變異系數、排肥量穩定性變異系數及排肥量均勻性變異系數,根據精量施肥要求,賦予各項性能指標權重,得到性能評價結果見表2。可知,直槽、交錯槽和螺旋槽排肥輪的綜合性能評價系數分別為7.07、5.94和5.33,交錯槽和螺旋槽排肥輪的綜合評價系數顯著低于直槽排肥輪,螺旋槽排肥輪的綜合排肥性能更優。

表2 不同排肥輪結構和轉速下排肥性能評價結果Table 2 Evaluation of fertilization performance of different fertilization wheel structure and rotational speed %
3.2.2施肥控制系統的性能
對濾波前后的作業速度信號進行對比結果見圖10。北斗+GPS測速模塊運行穩定,限幅遞推平均值濾波算法能有效濾除噪聲和異常信號,提高了作業速度的監測精度,但存在監測滯后問題。根據北斗+GPS模塊的通訊頻率和遞推平均值濾波算法的采樣個數可知,濾波導致的初始車速監測滯后時間為0.5 s;當機具停止行進時,濾波處理后的車速監測不受影響,具有良好的制動監測性能。
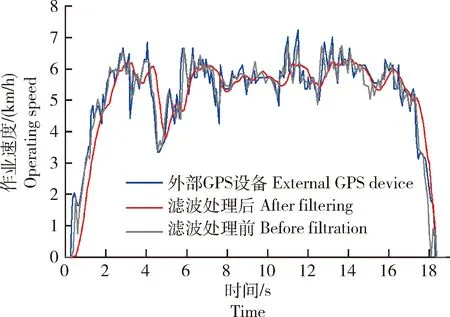
圖10 濾波前后作業速度信號對比Fig.10 Comparison of operation speed signal before and after filtering
由施肥流量調整的響應時間(圖11)可知,在相同轉速條件下,3次重復試驗所得施肥流量曲線差異較小;不同轉速下,各施肥流量穩定后曲線趨近于相應轉速的理論施肥流量曲線。根據電子秤的通訊速率范圍及施肥流量調整的響應時間,排除初始顆粒肥料對電子秤的沖擊影響,施肥流量調整的響應時間隨著排肥輪轉速的提高而延長;排肥輪轉速從零速狀態增至60 r/min,并趨近于穩定的理論施肥流量時,施肥流量調整的最長響應時間T約為0.85 s。

T為施肥流量調整的最長響應時間;n為排肥輪轉速。T is the longest response time of fertilization flow adjustment.n is the rotation speed of the fertilizing wheel.圖11 施肥流量調整的響應時間Fig.11 Response time of fertilizer flow adjustment
3.3 田間試驗
使用VP8D洋馬插秧機機頭搭載風送式集中排肥裝置和施肥控制系統,于四川農業大學雅安教學科研園區內開展田間試驗(圖12)。施肥控制系統電源來自插秧機車載電源,使用中化、漢楓和美豐化肥,設定施肥量為300、450和600 kg/hm2,試驗前校準施肥控制系統以適應肥料,并全速開啟輸肥風機,收集排肥裝置作業面積為36 m2的施肥量。
田間試驗時,平均作業速度為5.22 km/h,不同施肥量與肥料類型下的施肥量準確率見表3。可見,施肥準確率均高于95.00%,綜合施肥準確率平均值為96.89%。本研究的施肥控制系統在各施肥量要求均有較好的控制精度。
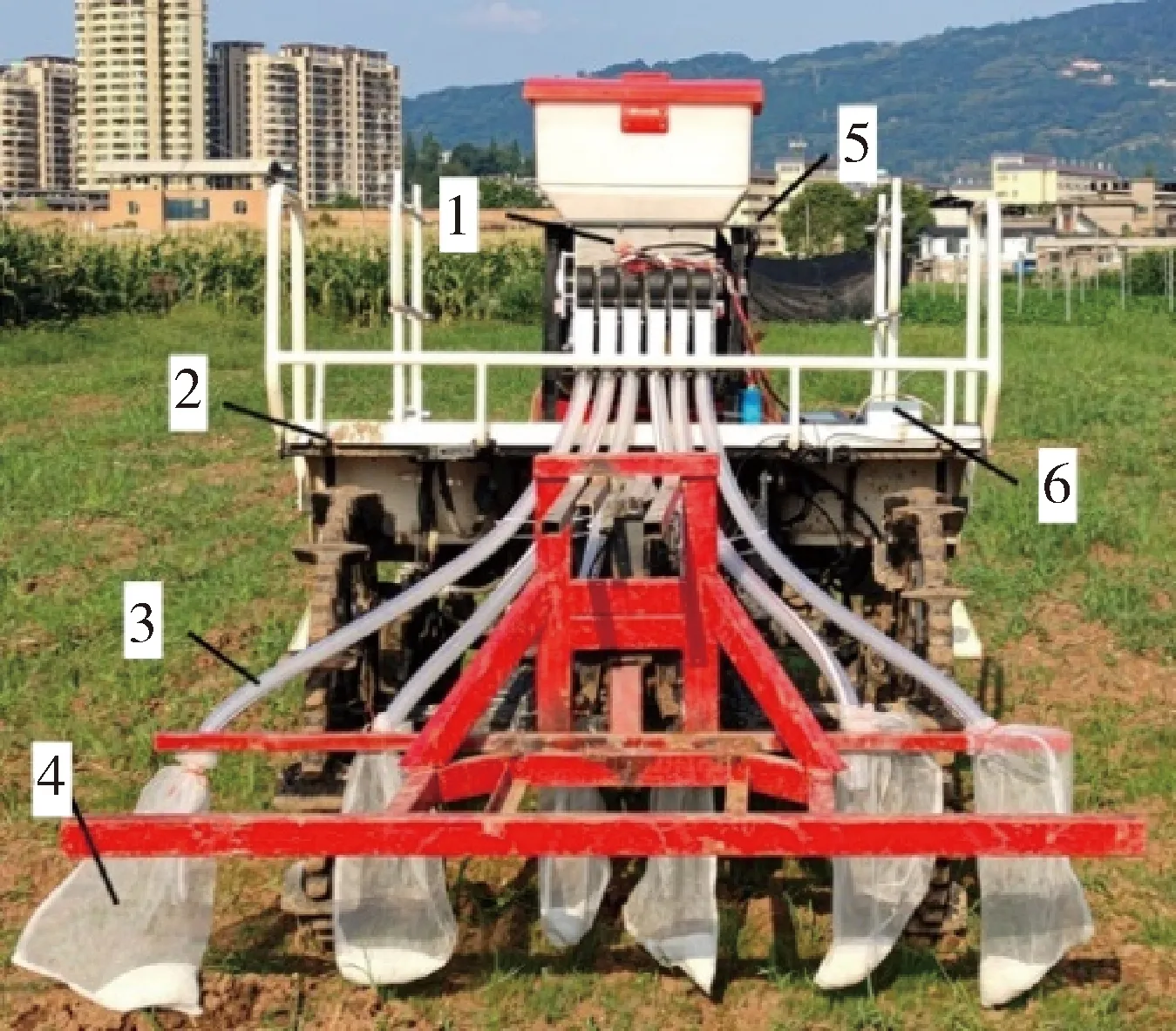
1.風送式集中排肥裝置;2.VP8D插秧機機頭;3.輸肥管;4.收集網袋;5.北斗+GPS天線;6.施肥控制器。1.Air-assisted centralized fertilization device;2.VP8D rice transplanting locomotive head;3.Fertilizer tube;4.Collection net bags;5.BDS+GPS antenna;6.Fertilizer controller.圖12 風送式集中排肥系統田間試驗Fig.12 Field experiment of air-assisted centralized fertilization system
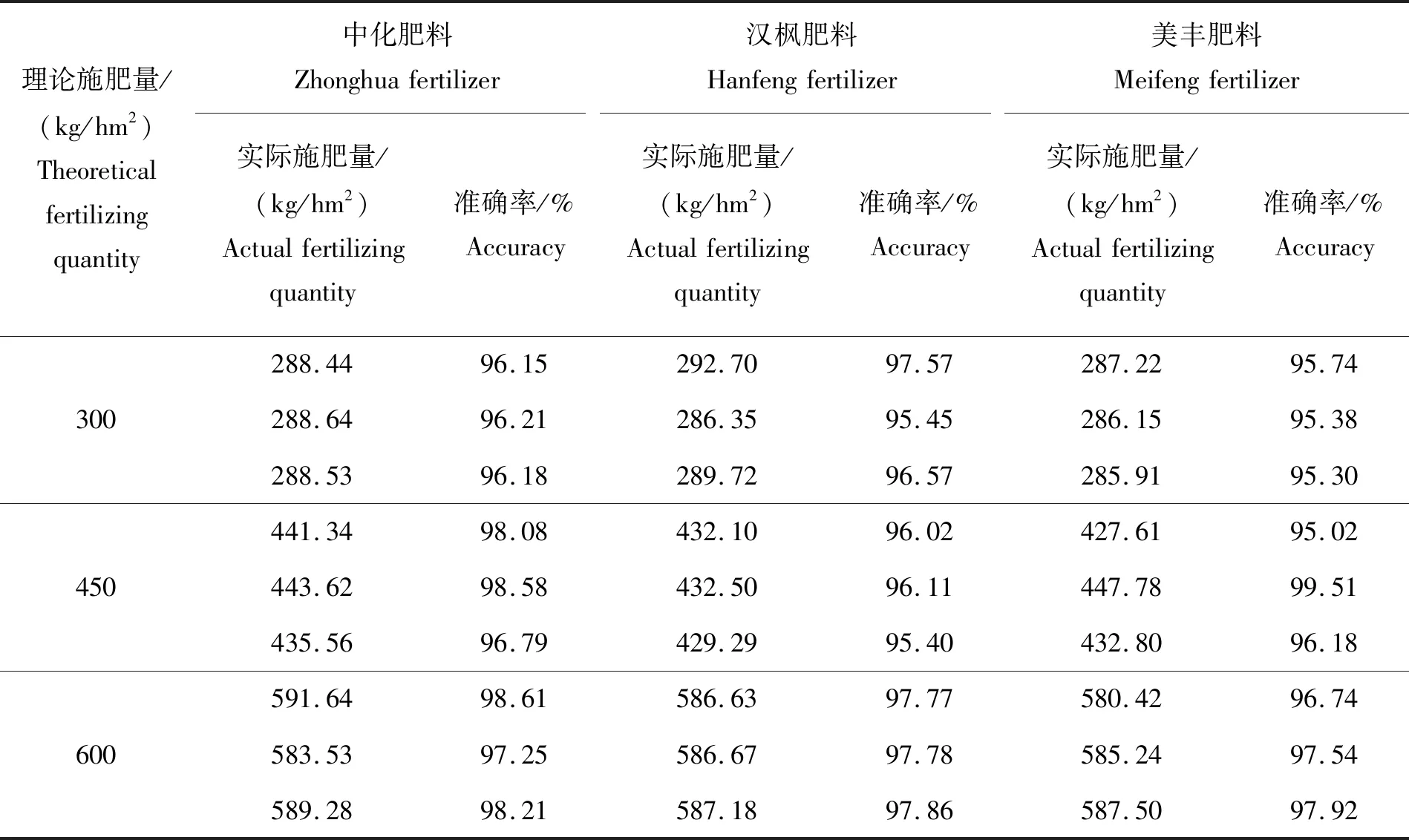
表3 不同施肥量和肥料類型下的施肥量準確率Table 3 Accuracy rate of fertilizing quantity under different fertilizing quantity and fertilizer type
4 結 論
本研究針對外槽輪排肥裝置施肥作業均勻性不高的問題,設計了一種采用“集中排肥+風送輸肥”方式的風送式集中排肥裝置,并開發了基于北斗+GPS硬件與限幅均值濾波算法的同步施肥控制系統。通過臺架試驗確定螺旋槽排肥輪的綜合排肥性能優于直槽和交錯槽排肥輪,螺旋槽排肥輪轉速為60 r/min時,螺旋槽排肥輪各行排肥量一致性變異系數、排肥量穩定性變異系數和排肥量均勻性變異系數分別為1.57%、0.15%和2.32%;以臺架試驗獲取施肥控制控制系統的施肥量調整響應時間,最長約為0.85 s;當理論施肥量為300~600 kg/hm2,田間試驗的平均作業速度為5.22 km/h時,施肥準確率>95%。該風送式集中排肥系統排肥量一致性和均勻性較好,同步排肥控制精度較高,可實現精量、均勻和同步施肥。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08