低損采摘蒜薹的微幅振動特性試驗研究
2023-05-11 05:35:26耿令新張利娟王恒一胡瀟楠
河南科技大學學報(自然科學版) 2023年4期
關鍵詞:振動
耿令新,李 洋,張利娟,王恒一,胡瀟楠
(河南科技大學 a.農業裝備工程學院;b.車輛與交通工程學院,河南 洛陽 471003)
0 引言
中國大蒜種植面積居世界首位[1-3]。蒜薹是人們喜歡吃的蔬菜之一[4],具有較高的營養功效[5]。大蒜的播種及收獲過程已基本實現機械化[6-12],但蒜薹收獲仍以人工為主[13]。
抽薹裝置作為蒜薹收獲機的核心工作部件,目前存在的主要技術問題是斷薹率較高且抽薹質量差。國內一些科研院校雖然研究出多種蒜薹采摘裝置,但因蒜薹損傷率高、蒜葉損傷嚴重,造成蒜頭減產及裝置復雜、成本高等問題,并未大范圍推廣應用。文獻[1]設計一種蒜薹采摘機,通過劃莖夾薹裝置和拔薹裝置完成蒜薹的抽取。文獻[14]設計蒜薹收獲機的電子調速控制單元,對收獲機的行走速度和夾持抽拔機構進行控制。文獻[15]對收獲期蒜薹的不同部位進行了拉伸和壓縮試驗,為蒜薹采摘機械手的設計提供了基礎數據。文獻[16]對蒜薹的拉伸特性進行試驗,得到了相關參數規律。另外,還有一些關于蒜薹采摘機械的專利[17-21]。以上文獻從不同角度對蒜薹采摘技術進行了研究和探索,但如何有效降低損傷目前尚無較為可行的措施。
本文在上述研究成果基礎上,綜合彈性力學、摩擦學和機械振動理論,提出微幅振動限制蒜薹變形量,減小蒜莖與蒜薹分離的抽薹力的方法,從而實現蒜薹與蒜莖低損分離的目的。在理論分析的基礎上搭建了蒜薹低損采摘試驗臺,通過響應面試驗,確定了頻率、振幅及抽薹速度的最優參數組合。
1 蒜薹低損采摘試驗臺
1.1 蒜薹低損采摘試驗臺設計依據與工作原理
田間作業的蒜薹采摘機如圖1所示。為保證抽薹試驗與田間抽薹的一致性,以蒜薹為研究對象,對其在田間抽出過程進行分析。
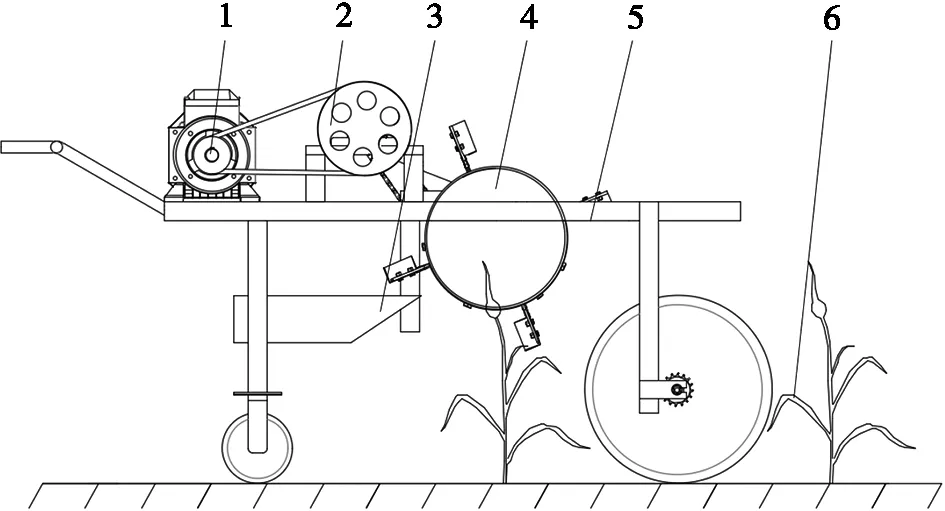
(a) 采摘機收獲蒜薹示意圖
田間抽取蒜薹時,蒜薹采摘機夾持部件相對于地面的運動(絕對運動),由機器沿水平方向的前進運動(牽連運動)和抽取機構相對于機器的圓周運動(相對運動)合成。取夾持部件與蒜薹接觸點為坐標原點,過坐標原點且平行于地面向右為X軸正方向,過坐標原點且垂直于地面向上為Y軸正方向。忽略夾持時蒜薹與夾持部件的相對滑動,接觸點相對于地面的運動方程[22]為:
(1)
其中:Vx為接觸點相對于地面的水平分速度,m/s ;Vy為接觸點相對于地面的豎直分速度,m/s;Vr為接觸點相對機器的圓周線速度,m/s ;Vm為機器前進速度,m/s;α為Vr與水平面夾角,(°)。
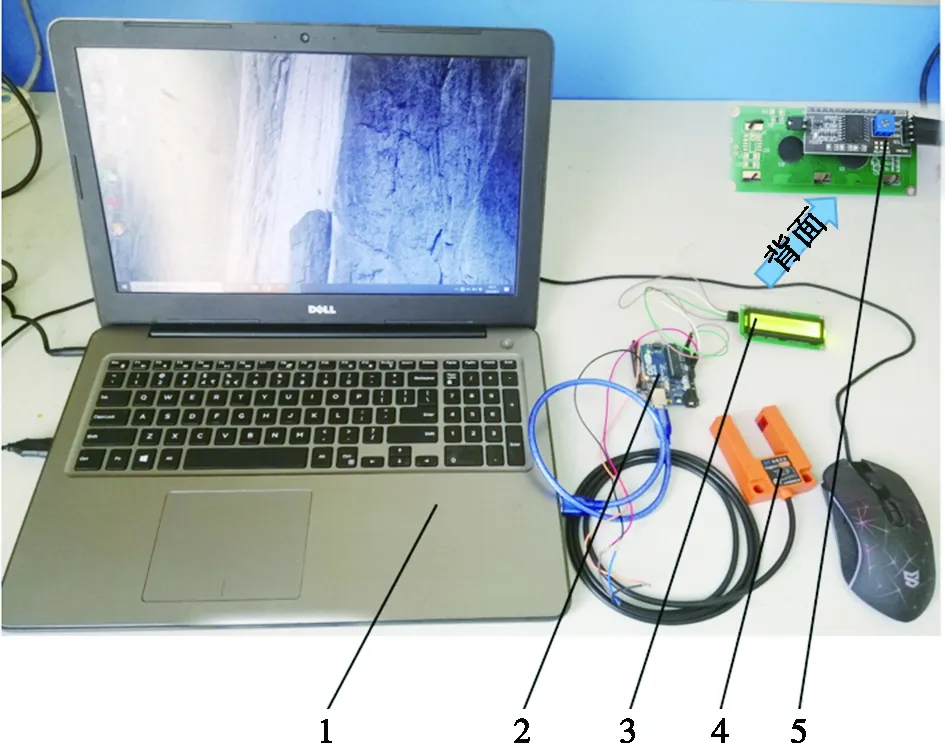
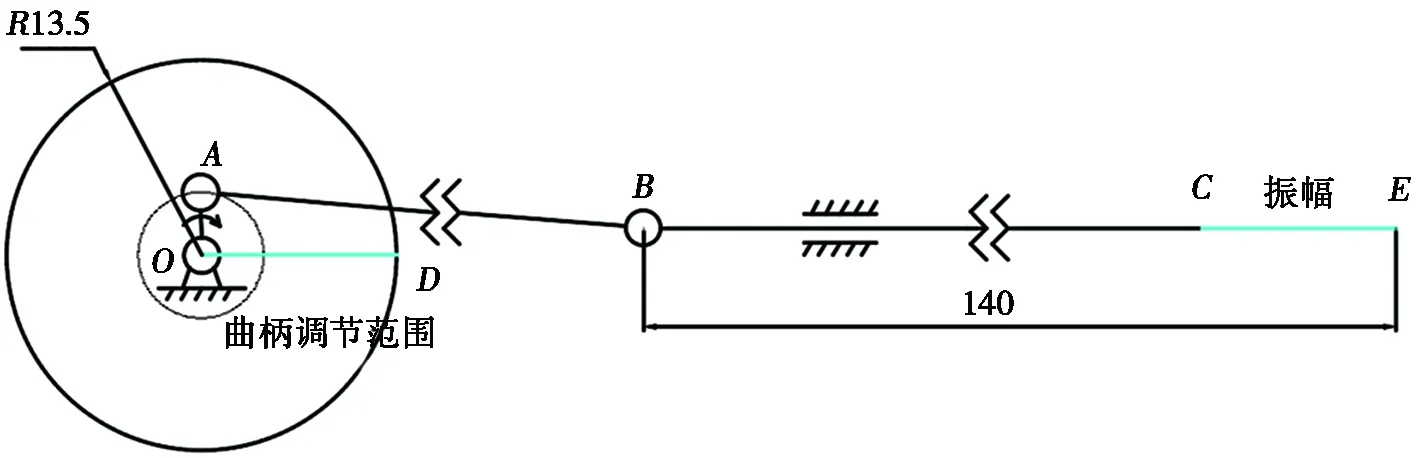
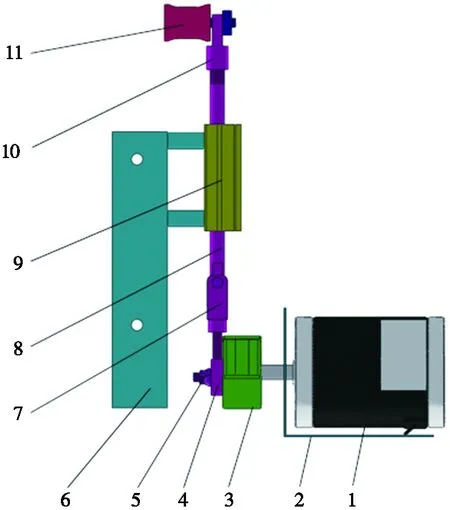
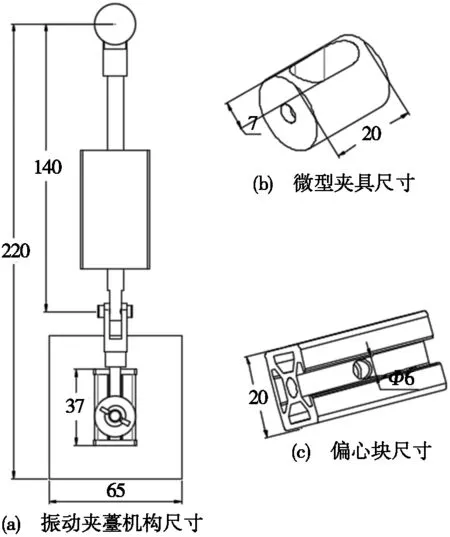
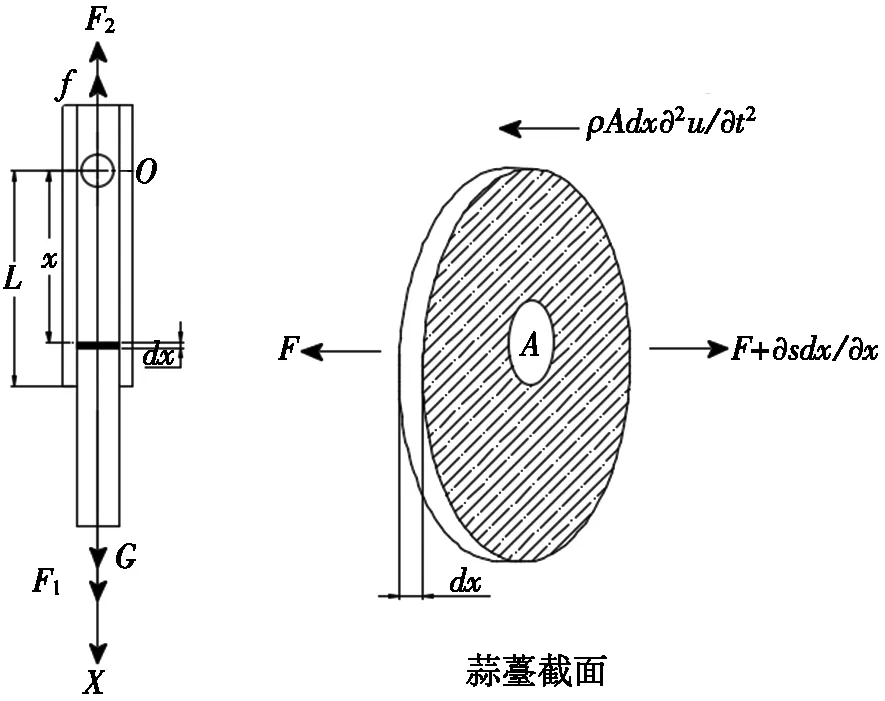
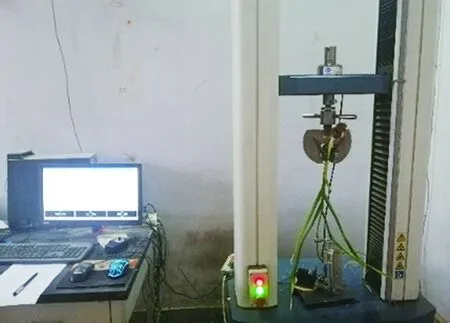
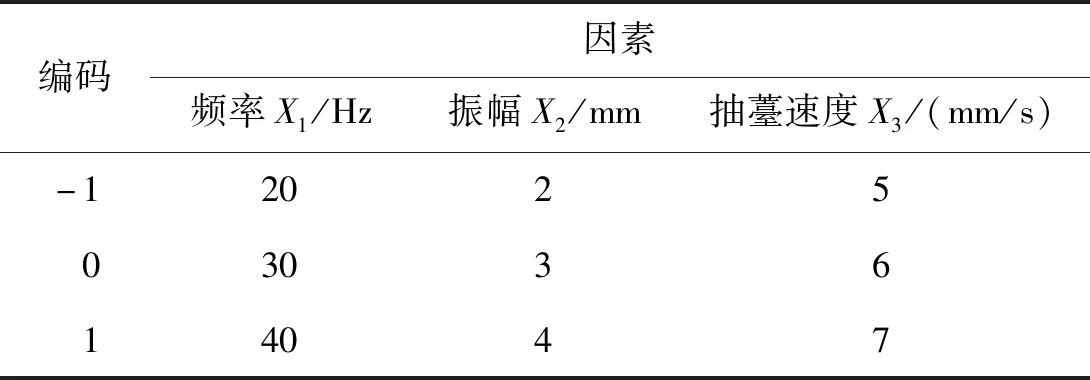
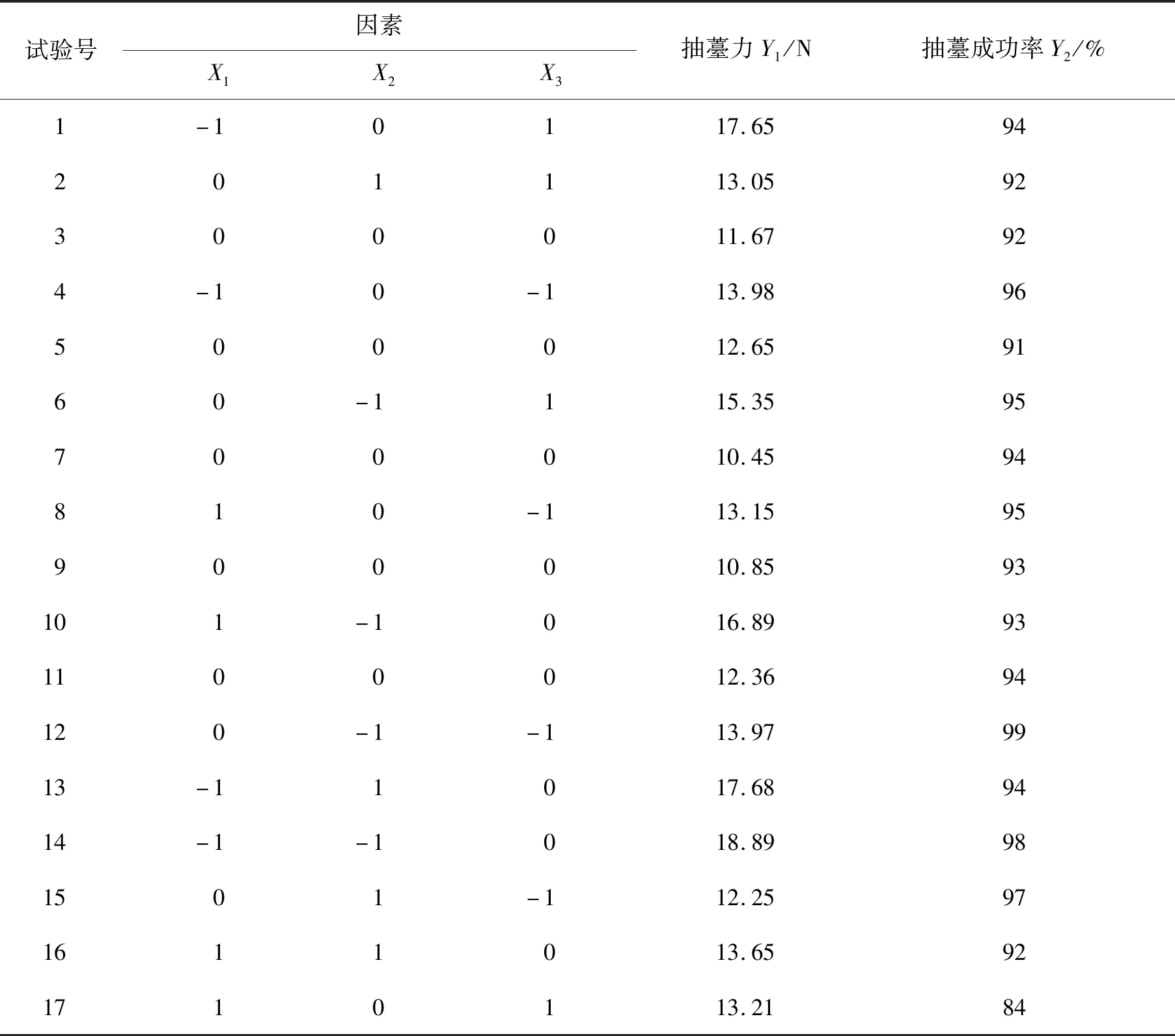
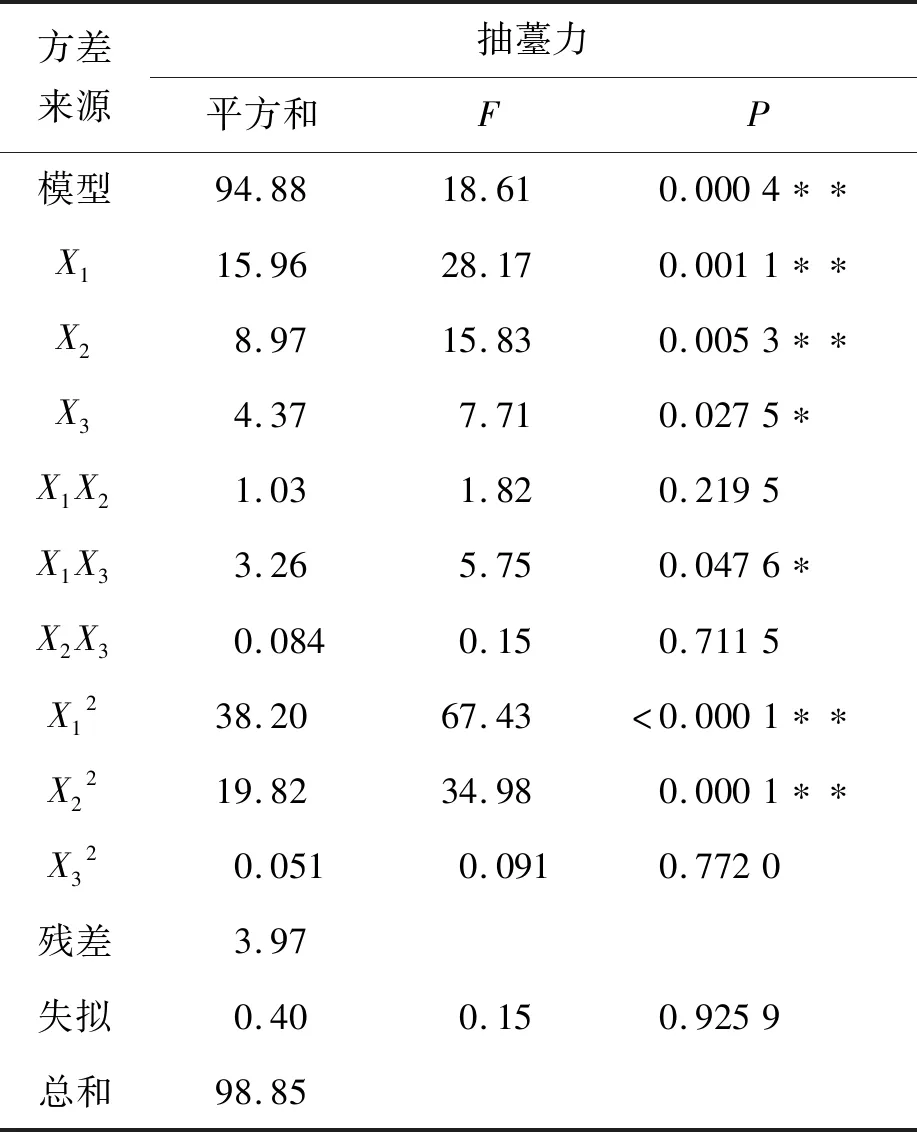
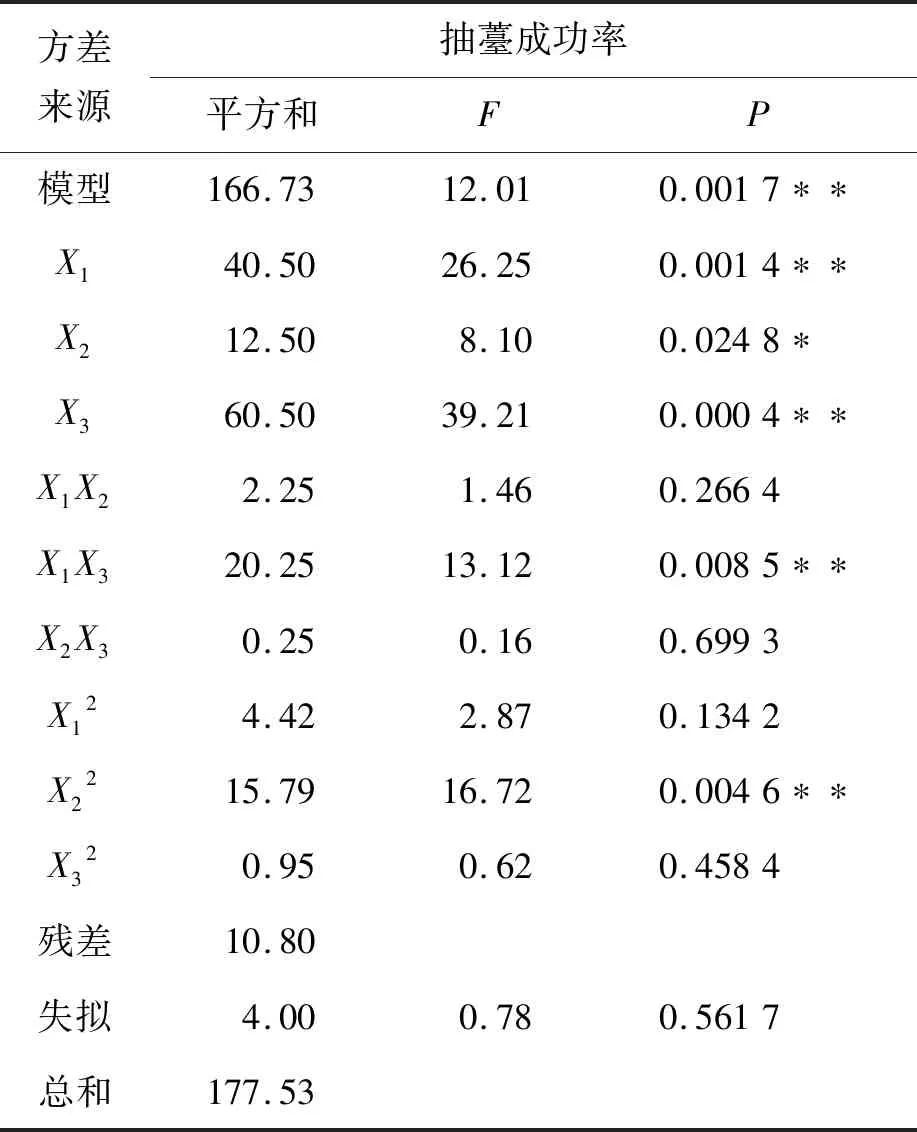
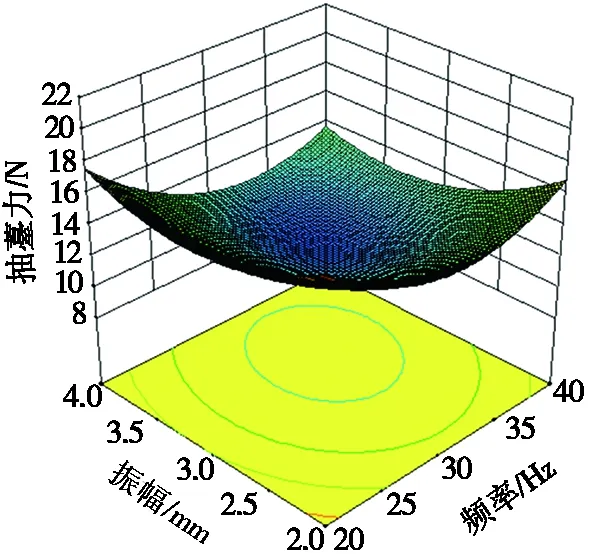
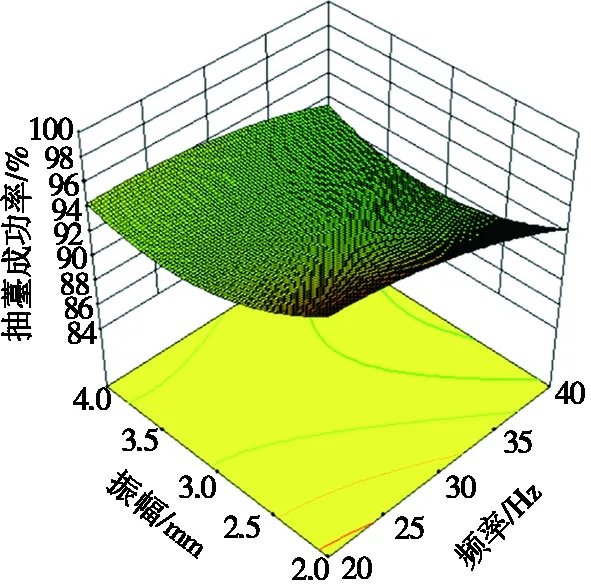
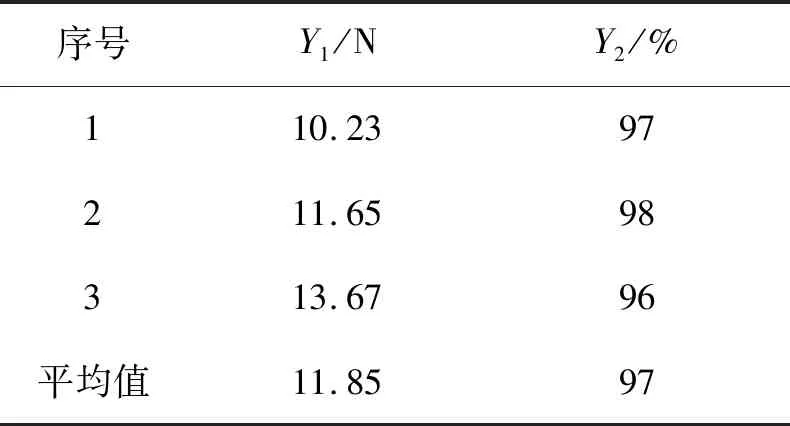
當Vm>Vrcosα時,蒜薹將向右傾斜;同理,當Vm 蒜薹是大蒜抽薹時從中抽出的花莖,蒜莖最高處葉子的平均生長高度為527 mm,蒜薹的平均生長高度為583 mm,蒜薹的平均生長高度高于蒜莖上最高處的葉子。蒜薹采摘機抽薹作業時,抽薹裝置的高度調整為527~583 mm,確保采摘到蒜薹。 1.試驗桌;2.配套計算機;3.變頻控制器;4.拉力試驗機;5.夾具;6.振動夾薹機構;7.紅外測速儀 蒜薹低損采摘試驗臺三維圖如圖2所示,包括紅外測速儀、振動夾薹機構、拉力試驗機等。紅外測速儀包括Arduino開發板、槽型光電開關、集成電路總線(inter-integrated circuit,IIC)顯示模塊等;振動夾薹機構包括直流電機、偏心塊、魚眼桿端關節軸承、Y型接頭、直線軸承、直線滑塊軸承座、I型接頭、微型夾具等;拉力試驗機包括機架、力傳感器以及夾具等。 試驗臺由計算機、變頻控制器以及偏心塊上魚眼桿端關節軸承位置來分別控制試驗臺的抽薹速度、頻率以及振幅。計算機通過配套的軟件控制拉力試驗機上夾具的移動方向及移動速度,即試驗臺抽取蒜薹的速度。變頻控制器通過調節旋鈕來控制振動夾薹機構中直流電機的轉速,即試驗臺抽取蒜薹的頻率。調節魚眼桿端軸承中軸在偏心塊上的位置來調節振幅,即試驗臺抽取蒜薹的振幅。試驗臺工作時,取一顆大蒜植株,在蒜莖包裹蒜薹頂端處向植株根部方向20 cm處扎孔,扎孔時用錐形針扎蒜薹,拉力試驗機的夾具夾持大蒜扎薹位置根部10 cm處,振動夾薹機構的微型夾具夾持蒜薹花苞下方位置。為了保證拉伸過程中蒜薹無打滑和損傷現象,在夾具和微型夾具與蒜薹接觸位置處粘貼硅橡膠材料[23-24]。之后通過變頻器控制振動夾薹機構的頻率,通過調節魚眼關節軸承的位置調節振動夾薹機構的振幅,拉力試驗機以一定的頻率、振幅、速度夾持著蒜薹向上移動,進行蒜薹的抽取。 計算機采集力傳感器的信號,實時變化的力通過傳感器傳輸到計算機數據采集卡上,實時顯示在計算機屏幕上。基于Arduino開發板自行設計了一個使用紅外傳感器模塊的數字轉速表,以檢測電機轉速。紅外測速儀如圖3所示。 1.計算機;2.Arduino開發板;3.顯示屏;4.槽型光電開關;5.IIC顯示模塊 紅外測速儀用于測量振動夾薹機構的振動頻率,主要由Arduino開發板、槽型光電開關和液晶顯示屏組成。槽型光電開關由紅外發射管和紅外接收管組成,當振動夾薹機構的偏心塊旋轉著遮擋住發射的紅外線時,遮擋信號會傳遞到Arduino開發板,產生一次開關信號,相應的算法進行計算,實時得出轉速和頻率信號。 振動夾薹機構是以曲柄滑塊機構為基礎設計的機構,如圖4所示。圖4中,OA為曲柄,繞點O勻速轉動,AB為連桿,BC為滑塊,各桿件鉸接在一起,曲柄滑塊機構實現往復運動。滑塊的往復運動通過曲柄的轉動來實現。而滑塊的振幅是通過調節曲柄的長度實現的,當曲柄長度從O到D增大時,滑塊的振幅從C向E增大。作業時,電機軸將動力傳遞到曲柄軸,軸上的曲柄OA順時針轉動,帶動連桿運動,振動的振幅通過調節曲柄的長度調節。 圖4 振動夾薹機構運動簡圖 振動夾薹機構三維圖如圖5所示。振動夾薹機構夾持蒜薹做往復運動,是抽取蒜薹的關鍵部件之一,其結構參數直接影響到蒜薹采摘性能。該機構包括偏心塊、魚眼桿端關節軸承、蝶形螺母、機架、Y型接頭、直線軸承和微型夾具等部件。該機構由直流電機提供動力,電機軸帶動偏心塊轉動,蝶形螺母和六角螺栓隨著偏心塊轉動,Y型接頭、直線軸承、I型接頭以及微型夾具隨之做往復運動,微型夾具夾持蒜薹花苞下方位置,從而達到夾持蒜薹振動的目的。其尺寸如圖6所示。 1.直流電機;2.電機固定座;3.偏心塊;4.魚眼關節軸承;5.蝶形螺母;6.機架;7.Y型接頭;8.直線軸承;9.直線滑塊軸承座;10.I型接頭;11.微型夾具 圖6 振動夾薹機構關鍵部件尺寸 蒜薹長度分為兩個部分,一是包裹在蒜莖中的長度,二是蒜莖包裹頂點到蒜薹花苞的長度。抽薹試驗時,扎薹位置相同,包裹在蒜莖中的蒜薹長度相同,振動抽薹減阻效果相同。蒜莖包裹點到蒜薹花苞位置的蒜薹沒有被蒜莖包裹,對減阻效果影響不大。 振動抽薹是蒜薹、振動夾薹機構與拉力試驗機相互作用的結果。研究蒜薹、振動夾薹機構與拉力試驗機的相互作用關系,可為減阻降損機理研究和機構設計提供理論基礎。 蒜薹被抽出的形式主要為:外力施加在蒜薹上,蒜薹整體發生彈性變形,因為蒜薹頂部有較大的韌性,而根部容易發生斷裂,且蒜薹根部被扎薹針扎透,所以根部容易發生斷裂。在扎薹位置斷裂后,前端的蒜薹會被抽出來。收獲的判定條件為蒜薹從扎薹處發生斷裂,即滿足關系為: F1+G>F2+f, (2) 其中:F1為試驗蒜薹所受的拉力,N ;G為試驗蒜薹自身的重力,N;F2為試驗蒜薹斷裂需要的力,N;f為試驗蒜薹與蒜莖之間的摩擦力,N。 由文獻[19]蒜薹的拉力變形曲線試驗可以得出結論:蒜薹材料簡化為雙線性材料模型,蒜薹的應力應變關系服從胡克定律。 1.扎薹孔;2.蒜莖;3.蒜薹 假設蒜薹為1根均質等截面的彈性體,截面積為A,質量密度為ρ,拉伸彈性模量為E,扎薹位置到蒜莖包裹頂端的長度為L,截面所受應力為σ,蒜薹所受拉力為F1。取扎薹孔處位置為坐標原點,蒜薹中心線為x軸。蒜薹蒜莖受力簡圖如圖7所示,取其中1個微元段進行分析。 2.2.1 直接抽取蒜薹機理分析 由胡克定律及截面公式得: (3) 其中,微元段的軸向應變量ε為: (4) 其中:v為試驗機夾具的速度,m/s;t為試驗抽薹的時間,s;dx為蒜薹微元段的長度,mm;A為蒜薹橫截面積,mm2。 微元段所受的合力為: F=F1-f-G-F2, (5) 其中:F為蒜薹微元段所受的合力,N。 將式(5)和式(4)代入式(3),得: (6) 其中:m為蒜薹的質量,g;g為重力加速度,m/s2。 質量、密度以及體積代入式(6),得到微元段的受力為: (7) 由式(7)可知:拉力與抽薹速度和蒜薹的直徑有關,隨著速度的增大,抽薹力增大。隨著蒜薹直徑的增大,抽薹力增大。 2.2.2 振動抽取蒜薹機理分析 振動抽取蒜薹時,蒜薹不產生裂紋,x截面的縱向位移用廣義坐標u來表示,對應一個x就有一個u,而不同時間內每個u也在變化,因此,u是x和t兩個變量的函數,即: u=u(x,t)。 (8) 在x截面處取蒜薹一個微小的單元體來研究,分析振動抽薹受力狀態。 (9) 微元段的軸向應變量ε為: (10) 微元段的軸向應力σ來表示其軸向拉力可得: (11) 其中:σ為蒜薹微元段的軸向拉力,N。 式(11)兩邊同時對x求導,得: (12) 將式(12)代入式(9),得: (13) 式(13)即蒜薹截面隨位移振動的運動方程。若要求出振動抽薹的方程,還需要對式(13)進行求解。 采用分離變量法來進行求解。在振動抽取蒜薹過程中,對應每1個截面位置坐標x有1個振幅U,但是由于蒜薹截面有無窮多個,所以U也有無窮多個,只能用1個未知函數U(x)來表示。U(x)就表示了蒜薹縱向振動的振型,即蒜薹上距原點x處截面的縱向振動幅值。此外,還有1個時間函數φ(t),表示蒜薹的振動方式,即蒜薹上各段的振動規律。通過分析,蒜薹振動的解具有以下形式: u(x,t)=U(x)φ(t)。 (14) 對蒜薹振動求解得: φ(t)=A1cosωnt+B1sinωnt; (15) (16) 其中:ωn為蒜薹縱向振動的頻率;U(x)則是蒜薹縱向振動的振型函數即主振型。 通過疊加法求得蒜薹的穩態受迫振動為: (17) 抽薹力和位移之間的關系為: (18) 由式(18)得:蒜薹所受的力與振動頻率、振幅有關。施加力頻率ω等于蒜薹的固有頻率ωn時,發生共振。蒜薹的固有頻率一定,隨著施加頻率的增加,F增加,抽出蒜薹過程中,蒜薹與蒜莖重合頂端位置先被抽出,之后沿著蒜薹頂端依次向下逐漸抽出,最后是扎薹位置。與假設的扎薹位置方向相反,抽薹力會越來越小。當固有頻率與施加頻率相同時,拉力最小;當頻率繼續增大,F增大。當振幅增大時,F減小。隨著振幅的增大,抽薹力減小。 直接抽薹過程是微型夾具夾持蒜薹花苞位置,靠向上的拉力將蒜薹從蒜莖中抽出。蒜薹伸出蒜莖部分所有截面處的抗拉力必須大于蒜莖對蒜薹的摩擦力與扎孔處最大斷裂力之和,否則,蒜薹容易拉斷。而振動抽薹過程中蒜薹在每個振動周期只需克服振幅所需的變形力即可,所以既減小了摩擦阻力,又不會產生大的變形,從而實現減阻低損。 根據GB/T 5262—2008《農業機械試驗條件測定方法的一般規定》試驗方法,在2022年4月自行搭建的試驗臺上進行振動抽薹試驗。試驗地點為河南科技大學實驗室。試驗品種采用河南省洛陽市孟津縣九泉村栽種的頂紅早大蒜,試驗樣品處于蒜薹收獲期。由人工將蒜薹植株帶蒜頭從土地中挖掘出來密封于保鮮袋中帶回實驗室中種植,采后3天內完成試驗。用數顯游標卡尺測量每根蒜薹兩端和中間點處的直徑,兩端和中間點處直徑的平均直徑作為該根蒜薹的直徑,測量蒜薹的平均直徑為5.48 mm。試驗采用拉力試驗機(型號為DNS02)測量抽薹的拉力。試驗期間,所用蒜薹無蟲和病變。其余試驗設備包括游標卡尺、鋼卷尺、錐子、配套計算機等。振動抽薹試驗現場如圖8所示。試驗開始時,每次相同的扎薹位置,夾薹位置重復試驗100次,配套計算機記錄拉力和時間的關系,同時記錄抽薹成功的次數。 圖8 振動抽薹試驗現場 根據SB/T 10330—2000《蒜薹》試驗標準以及評價作業效果的相關量化指標,本文主要研究振動對抽薹性能的影響,以期在農戶抽薹的作業過程中降低勞動強度,減小抽薹阻力,減少損耗,提高作業效率。因此,結合低損的效果和減阻情況,為了準確評價振動抽薹機構在抽薹方面的作業效果,參考相關文獻以及田地調研結果,以頻率、振幅、抽薹速度為試驗因素,以抽薹力和抽薹成功率為指標。抽薹成功率計算方法如下: (19) 其中:Y2為抽薹成功率,%;S1為扎薹處斷裂蒜薹的數量,根;S0為每組試驗的大蒜植株總數,根。 3.3.1 試驗方案與結果 采用響應面試驗設計方法進行試驗,根據試驗臺試驗情況,結合理論分析及單因素試驗結果,確定頻率為20~40 Hz、振動抽薹機構的振幅為2~4 mm和抽薹速度為5~7 mm/s。以此設計因素水平編碼表如表1所示。 表1 因素水平編碼 根據 Box-Behnken 試驗原理設計的3因素3水平響應面結果如表2所示。表2中,X1、X2、X3為因素編碼值。 表2 響應面試驗設計與結果 3.3.2 試驗結果分析 利用Design-Expert 10.0.7 軟件對表2試驗數據進行多元回歸擬合分析,得到試驗因素頻率、振幅和抽薹速度與試驗指標抽薹力和抽薹成功率的函數關系,各指標的方差分析結果分別如表3和表4所示。 表3 抽薹力方差分析 表4 抽薹成功率方差分析 (Y1)抽薹力 由表3可知,對于抽薹力,試驗因素影響蒜薹抽薹力的主次順序為:頻率、振幅、抽薹速度。得到因素對抽薹力影響的回歸方程: (20) 對式(20)進行失擬檢驗(如表3所示),失擬項的P值為0.925 9(P>0.1),說明模型擬合程度很高。模型的P值為0.000 4,小于0.01,表明模型極顯著。其決定系數R2為0.908 3,表明90%以上的響應值均可以由這個模型解釋,因此,回歸方程能夠比較準確地對該試驗臺的抽薹力指標進行預測。 (Y2)抽薹成功率 由表4可知,對于抽薹成功率,試驗因素影響蒜薹抽薹成功率的主次順序為:抽薹速度、頻率、振幅。得到因素對抽薹成功率影響的回歸方程: (21) 對式(21)進行失擬檢驗(如表4所示),失擬項的P值為0.561 7(P>0.1),說明模型擬合程度很高。模型的P值為0.001 7,小于0.01,表明模型極其顯著。其決定系數R2為0.860 9,表明86%以上的響應值均可以由這個模型解釋,因此,回歸方程能夠比較準確地對該試驗臺的抽薹成功率指標進行預測。 為了直觀了解各交互因素對試驗指標的影響,利用 Design-Expert 10. 0. 7 軟件分別作出影響顯著的各交互因素對抽薹力與抽薹成功率影響的響應面分析圖,分別如圖9和圖10所示。 3.4.1 因素交互作用對抽薹力的影響 因素交互作用對抽薹力的響應面如圖9所示,分析可知: (a)抽薹力隨抽薹頻率的增大先減小后增大。隨著頻率的增大,振動周期縮短,抽薹速度不變時,蒜薹振動周期的變形量減小,克服的變形力減小,抽薹力減小。當頻率增大到蒜薹自身固有頻率時,抽薹力最小,蒜薹最容易被抽出來。繼續增加頻率,抽薹頻率大于蒜薹的固有頻率,抽薹力增大。 (a) X3=5 mm/s (b)抽薹力隨抽薹振幅的增大先減小后增大。由式(18)得,頻率一定,隨著振幅的增大,抽薹力減小。在抽薹成功的前提下,振幅增大,蒜莖會隨著蒜薹的振幅變化而隨之變化,蒜薹和蒜莖處于相對靜止狀態,削弱振幅變化帶來的減阻效果,抽薹力會隨之增大。 (c)抽薹力隨抽薹速度的增大保持基本不變趨勢。抽薹速度增加,不影響蒜薹的結構,速度變化,抽薹力不發生變化。 3.4.2 因素交互作用對抽薹成功率的影響 因素交互作用對抽薹成功率的響應面如圖10所示,分析可知: (a)抽薹成功率隨著頻率的增大先增大后減小。蒜薹為彈性體,頻率越高,蒜薹變形的速度越快。抽薹成功率先增后減是因為隨著頻率增加,變形與恢復的速度逐漸相同,當變形與恢復的速度相同時,抽薹的成功率最高。頻率繼續增加,恢復的速度趕不上蒜薹變形的速度,蒜薹過量變形時,蒜薹在非扎薹位置斷裂,抽薹成功率減小。 (a) X3=6 mm/s (b)抽薹成功率隨著振幅的增大呈整體下降趨勢。振幅增大,蒜薹截面變形量較大,蒜薹的內部纖維結構被破壞,蒜薹在非扎薹位置位置斷裂,抽薹成功率減小。 (c)抽薹成功率隨著速度的增大呈整體下降趨勢。速度越大,變形速度越快,蒜薹恢復的速度小于變形速度,蒜薹內部纖維結構被破快,達不到扎薹的位置就會斷裂,抽薹成功率降低。 為達到最佳的振動抽薹性能,為后續的機械化設計提供參數,以便達到更好的抽薹效果,需要使抽薹力減小,抽薹成功率增大。通過交互因素對抽薹力的影響效應分析可知:當要達到較小抽薹力把蒜薹抽出來時,振幅和頻率位于中心水平。要滿足抽薹成功率最高,須使抽薹速度和振幅小,頻率位于中心水平。考慮各因素指標對響應值的影響程度變化不同,需進行多目標優化分析。按照抽薹力最小、抽薹成功率最大的原則,運用 Design-Expert 10. 0. 7 軟件對指標的全因子二次回歸模型最優化進行求解,目標函數約束條件為: (22) 根據2個指標的重要性,設置抽薹力和抽薹成功率的權重分配為W={0.4,0.6}。優化后得到最優工作參數組合為:抽薹速度5.0 mm/s、頻率31.06 Hz、振幅3.27 mm,此時抽薹力為10.62 N,抽薹成功率為96%。在實際操作中,為方便參數的調節,各參數取整得到最優參數組合為:抽薹速度5 mm/s、頻率30 Hz和振幅3 mm。 為了驗證優化結果的可行性,對取整后最優參數組合進行田間驗證試驗,試驗于2022年5月在河南省洛陽市孟津縣田間進行,試驗對象為頂紅早大蒜,固定株距為100 mm,每組試驗50株大蒜,保證其他因素不變的情況下,重復3次取平均值。 根據GB/T 5262—2008《農業機械試驗條件測定方法的一般規定》試驗方法,選取長勢均勻、莖葉茂盛及植株高度一致的大蒜植株進行收獲試驗。試驗過程中,每組試驗均保持樣機的勻速作業。 試驗驗證結果如表5所示,即抽薹力為11.85 N,抽薹成功率為97%,與最優參數組合預測值比較接近。 表5 試驗驗證結果 (1)本文提出并研究了“蒜薹采摘微幅振動減阻方法”,通過振動夾薹機構、紅外測速儀與拉力試驗機搭建了抽取蒜薹的試驗臺,該試驗臺成功地完成了蒜薹的抽取。 (2)采用Box-Behnken試驗方法進行回歸分析可知,各因素對抽薹力的影響主次順序為頻率、振幅、抽薹速度;各因素對抽薹成功率影響主次順序依次為抽薹速度、頻率、振幅。 (3)通過響應面試驗得到最優參數組合為:抽薹速度5.0 mm/s、頻率31.06 Hz、振幅3.27 mm,此時抽薹力為10.62 N,抽薹成功率為96 %。對取整后最優參數組合進行田間驗證試驗,證明了最優參數組合的可靠性。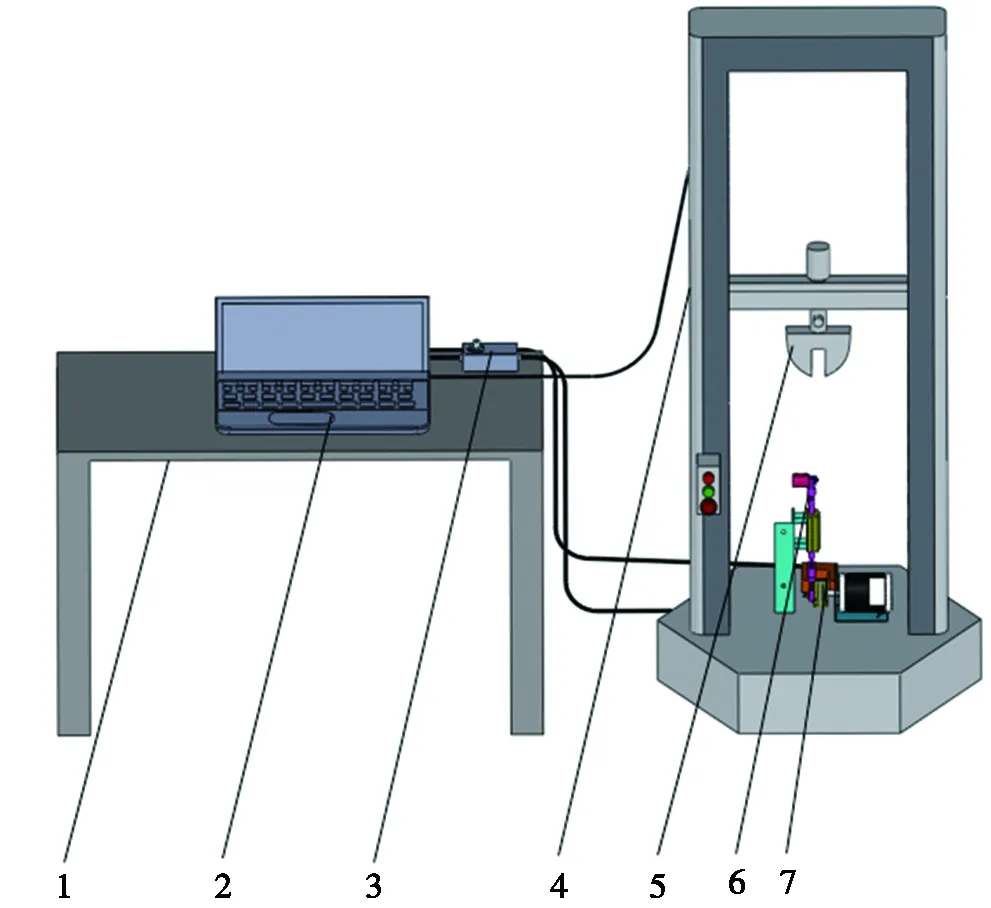
1.2 紅外測速儀組成及其工作原理
2 振動夾薹機構設計
2.1 機構組成及設計原理
2.2 振動抽薹減阻機理分析

3 振動抽薹試驗
3.1 試驗材料與方法
3.2 試驗因素與指標
3.3 試驗方案與結果分析
3.4 交互因素對抽薹性能影響分析
3.5 參數優化
3.6 田間試驗驗證
4 結論
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00