迭代修正魯棒極限學習機
2023-05-24 03:18:18呂新偉魯淑霞
計算機應用 2023年5期
關鍵詞:實驗
呂新偉,魯淑霞*
(1.河北省機器學習與計算智能重點實驗室(河北大學),河北 保定 071002;2.河北大學 數學與信息科學學院,河北 保定 071002)
0 引言
極限學習機(Extreme Learning Machine,ELM)自提出以來,已經成功應用于各種實際問題[1-5],成為廣泛使用的機器學習工具之一。ELM 主要依賴于給定的訓練數據標簽,如基于L2范數損失函數的ELM[6]假設訓練標簽的誤差是一個正態分布;然而,實際問題中的訓練樣本不能保證誤差具有正態分布。此外,ELM 往往過分強調訓練過程中殘差較大的異常點,導致ELM 對異常點的敏感性和魯棒性較差。因此,構造能夠抑制異常點影響的魯棒極限學習機(Robust ELM,RELM)模型,在機器學習中是必要和有意義的。
ELM 的許多變體都致力于提高ELM 對異常點的魯棒性。引入正則化的極限學習機[7-9]通過在最小化目標函數中添加正則化項以減小結構風險,如加權極限學習機(Weighted ELM,WELM)[10]和魯棒極限學習機(RELM)[11]為訓練樣本分配適當的權值,但它們的性能在很大程度上依賴于權重估計的初始值。Chen 等[12]基于正則化項和損失函數的多種組合設計了迭代重加權極限學習機(Iteratively Re-Weighted ELM,IRWELM),并通過迭代加權算法實現。最近的一些研究則通過替換損失函數來增強極限學習機的魯棒性,例如使用Huber 損失函數[13]、L1范數損失函數[14]以及各損失函數的變體[15-16]等實現魯棒極限學習機,以減少異常點的影響;但它們仍然不夠穩健,因為這些損失函數受到殘差較大的異常點的影響。具有相關熵損失函數[17]和重標極差損失函數[18]的極限學習機改進版本傾向于構造有界和非凸損失函數,以提高對異常點的魯棒性。盡管這些損失函數具有良好的學習性能,但是求解該優化問題的方法過于復雜。有界的損失函數可以抑制殘差較大異常點的影響,迭代重加權正則化極限學習機(Iterative Reweighted Regularized ELM,IRRELM)[19]通過有界的L2范數損失函數抑制較大異常點的負面影響;但過多的異常點反過來會影響損失函數對異常點的判定,影響回歸結果。因此本文在有界L2范數損失函數的基礎上使用迭代修正方法,提出了一種用于回歸估計的魯棒極限學習機,以抑制異常點的負面影響,采用迭代加權算法求解魯棒極限學習機。在每次迭代中,為本輪認為是異常點的標簽重新賦值,并在每次迭代的過程中逐漸去除異常點的影響,增強極限學習機的魯棒性。
本文的主要工作包括:為減小極端異常點的影響,采用了有界損失函數,并在有界損失函數的基礎上提出了迭代修正魯棒極限學習機(Iteratively Modified RELM,IMRELM),讓這些殘差較大的異常點在迭代的過程中找到正確的標簽。實驗結果表明,當數據中的異常點數過多且殘差較大時,本文IMRELM 的結果優于對比的幾種魯棒極限學習機算法。
1 相關工作
1.1 極限學習機
假設有N個任意樣本,其中:xi∈Rd為輸入變量;yi∈R 是回歸估計中相應的目標。ELM 是一個單隱層神經網絡,具有L個神經元的ELM 的輸出函數可以表示為:
其 中:β=[β1,β2,…,βL]T為 ELM 輸出權 重;h(x)=[h1(x),h2(x),…,hL(x)]為隱含層矩陣;f(x)為回歸估計中相應的目標預測值。
ELM 求解以下優化問題來推導輸出權重β:
s.t.h(xi)β=yi-ei;i=1,2,…,N
其中:ei是訓練誤差;C是平衡模型復雜度的正則化參數。基于最優性條件,得到式(2)的最優解β:
其 中:數據的 真實標 簽y=[y1,y2,…,yN]T;H=[h(x1),h(x2),…,h(xN)}T是隱藏層輸出矩陣;I為適當大小的單位矩陣。
1.2 迭代重加權正則化極限學習機
為了減小L2范數損失函數對于殘差較大異常點的敏感性,IRRELM 使用了非凸L2范數損失函數。
其中:z是一個變量;θ是一個常數,θ是對大異常點的懲罰。g(z)的上界意味著損失在一定值后不會增加懲罰,并且它抑制了異常點的影響。
IRRELM 的優化模型為:
s.t.h(xi)β=yi-ei;i=1,2,…,N
在迭代重加權中,每個樣本的權重通過殘差由下式給出:
IRRELM 的第k次迭代解為:
在IRRELM 中,βk為第k次迭代中求得的隱層輸出權重;wk=diag(w1,w2,…,wN)為第k次迭代樣本權重。
算法1 IRRELM 算法。
2 迭代修正魯棒極限學習機
對于魯棒極限學習機,通常都是減小異常點的影響。但是基于L2范數損失函數的ELM 對異常點非常敏感,當數據中存在異常點時,異常點L2范數損失會很大。因此,選擇損失較小的數據進行訓練模型是有效的。為了避免過多異常點污染模型以及數據和資源的浪費,同時解決模型泛化能力不強的問題,在每次迭代中,對于那些殘差較大的數據進行修正。
為了處理異常點,本文提出了一種迭代修正魯棒極限學習機算法。
在IRRELM 中,優化模型又可以寫成:
令tik=1 -wik,提出以下損失函數:
優化模型為:
優化模型關于β求導并令其等于零,得到迭代修正魯棒極限學習機的解為:
其中:H=[h(x1),h(x2),…,h(xN)]T;wk=diag(w1,w2,…,wN),tk=diag(t1,t2,…,tN);C1、C2為正則化參數;I為適當大小的單位矩陣。
算法2 IMRELM 算法。
3 實驗與結果分析
為了研究IMRELM 的有效性,在人工數據集和真實數據集上進行了數值實驗。通過10 次交叉驗證和網格搜索方法選擇實驗參數。所有上述算法選擇的參數的范圍如下:參數kmax:{10i,i=2,3,4},停止閾值p:{10i,i=-5,-4,…,1,2},正則化參數C1、C2:{10i,i=-5,-4,…,4,5}。所有的實驗都在3.40 GHz 的機器上使用Pycharm 2019 進行。
比較算法是極限學習機(ELM)和一些魯棒極限學習機,包括加權極限學習機(WELM)、迭代重加權極限學習機(IRWELM)和迭代重加權正則化極限學習機(IRRELM)。在實驗中,使用sigmoid 激活函數g(x)=1/(1+exp(-x))。迭代加權的算法中的迭代次數為200,采用均方誤差(Mean-Square Error,MSE)作為估計標準:
其中:N是測試集的數量;yi、f(xi)分別是真實值和相應的預測值。通常,均方誤差越小,方法的性能越好。
3.1 IMRELM在人工數據集上的實驗
在不同異常點水平的人工數據集上進行實驗,結果給出了IMRELM 算法和其他算法的實驗結果,并通過統計測試比較了這些算法的性能。人工數據集來源于回歸問題中廣泛使用的函數,定義如下:
實驗在具有不同異常點水平的人工數據集上進行,并通過統計測試比較這些算法的性能。在實驗中,噪聲是[-10,10]上的均勻分布。按照數據的大小隨機生成不同占比的噪聲并添加到訓練集上。為了揭示IMRELM 算法的魯棒性,在不同水平異常點(包括0%、10%、20%、…、80%)數據集上分別進行對比實驗。在具有不同異常點水平的噪聲環境情況下,對比了幾個改進的極限學習機的魯棒性。對于每個異常點水平,在50 次獨立運行中進行實驗,以避免不公平的比較,并獲得了表1 中的均方誤差和標準差(Std)。
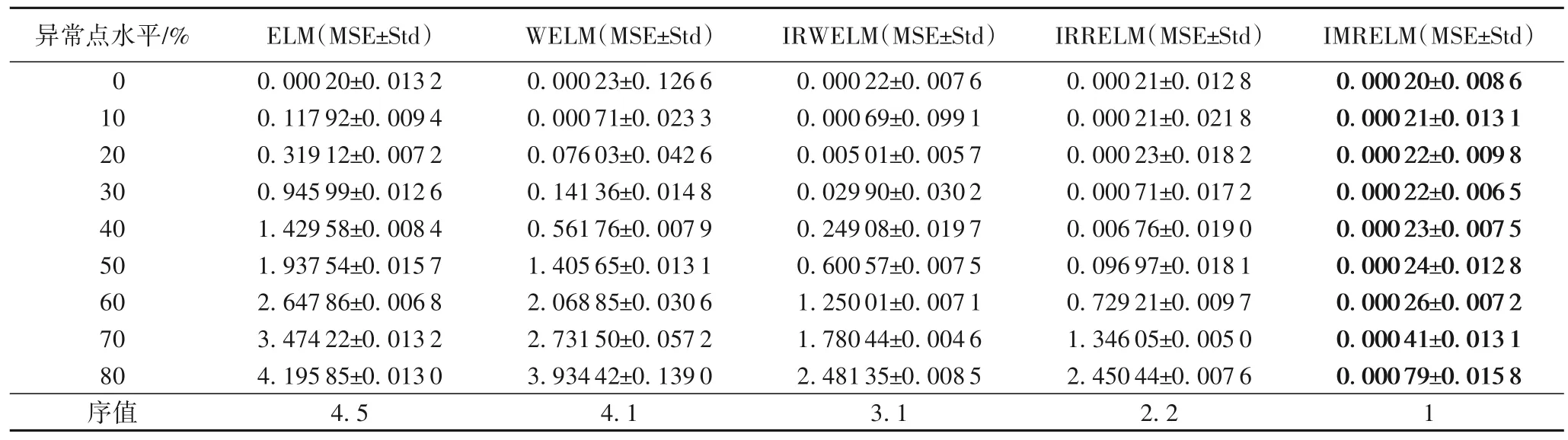
表1 具有不同異常點水平的人工數據集上的實驗結果Tab.1 Experimental results on synthetic datasets with different outlier levels
從表1 可以看出,在沒有異常點的情況下,經典ELM 表現出了很好的性能,具有最小的均方誤差值。IMRELM 的表現優于WELM、IRWELM 和IRRELM。在不同異常點水平的情況下,ELM 在所有水平上的表現都較差,反映了它對異常點的敏感性。
對于人工數據集,得到=26.244 和FF=21.520 2。在Friedman 測試中,如果α=0.05,得到Fα=2.157<21.520 2。因此,拒絕“兩個算法性能相同”這一假設。繼續進行Nemenyi 檢 驗,α=0.1,qα=2.459,CD=1.832 8。如 表1 所示,IMRELM 和其他4 種魯棒性方法之間的排名差異為3,3,3,2 和1,因此,得出的結論是:IMRELM 的性能明顯不同于ELM、WELM、IRWELM,并且IMRELM 的性能最好。
為了更清楚地顯示這些算法的性能,圖1 顯示了在均勻分布噪聲下,5 種算法在不同異常點水平下的回歸曲線:當數據中沒有異常點時,5 種算法與原始曲線(SIN)擬合較好;當數據中異常點占比到30%時,WELM 開始偏離原始曲線;當數據中異常點占比到50%時,IRWELM 開始偏離原始曲線;當數據中異常點占比到60%時,IRRELM 開始偏離原始曲線。可以看出隨著數據中異常點水平的增加,ELM、WELM、IRWELM 和IRRELM 曲線部分偏離原始曲線,朝向異常點,而IMRELM 的曲線始終最接近原始曲線。
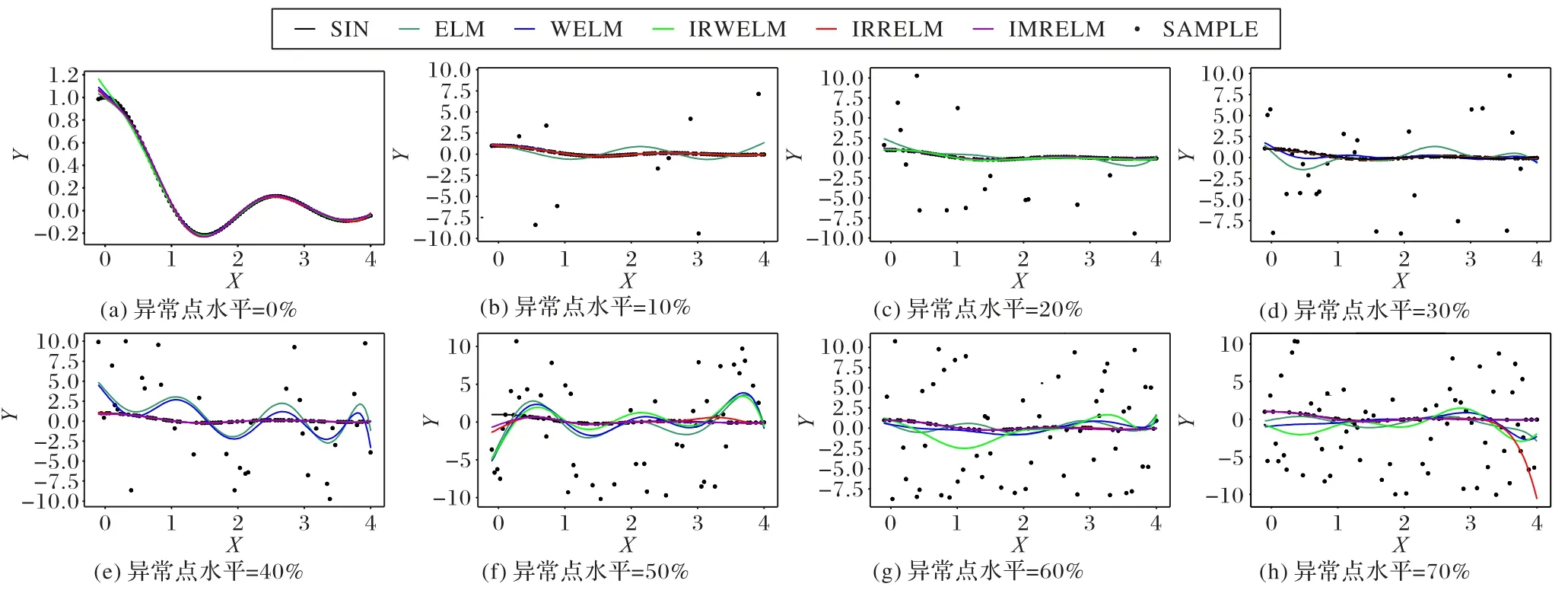
圖1 五種算法在不同異常點水平下的回歸曲線Fig.1 Regression curves of five algorithms under different outlier levels
3.2 IMRELM在真實數據集上的實驗
在12 個真實數據集上進行了進一步的實驗,以驗證IMRELM 在處理噪聲和異常點的有效性。在數據準備過程中,根據訓練樣本和測試樣本的數量,將每個數據集隨機分為兩部分(訓練集和測試集)(見表2)。在訓練集和測試集中,所有特征均歸一化為零平均值,標準殘差為1。真實數據集都來自UCI[20]。

表2 真實數據集Tab.2 Real datasets
從表3 可以看出,在沒有異常點的情況下,ELM 和極限學習機的其他4 種ELM 變體實現了相似的預測精度。當在具有異常點的數據集上進行訓練時,如均方誤差所反映的,ELM 的性能最差,它的性能隨著異常點水平的增加顯著下降,這表明ELM 對異常點不具有魯棒性;其他算法的預測精度要高得多,且IMRELM 在大多數情況下都優于其他算法。

表3 具有不同異常點水平的真實數據集上的實驗結果Tab.3 Experimental results on real datasets with different outlier levels
接下來通過Friedman 測試來討論這5 種算法在12 個真實數據集上的性能。表4 展示了幾種魯棒算法在實際數據集上的平均排名;表5 中展示了Friedman 測試的相關數據,其中Δ(IMRELM-ELM)表示IMRELM 和ELM 的序值差。在真實數據集上FF均大于Fα,因此,拒絕在這12 個真實數據集上的“兩個算法性能相同”這一假設。因為Δ(IMRELMELM)、Δ(IMRELM-WELM)的值均大于CD值1.832 8,所以IMRELM 與ELM、WELM 和IRWELM 的性能有明顯的差異。Δ(IMRELM-IRRELM)、Δ(IMRELM-IRWELM)的值均 在1左右。
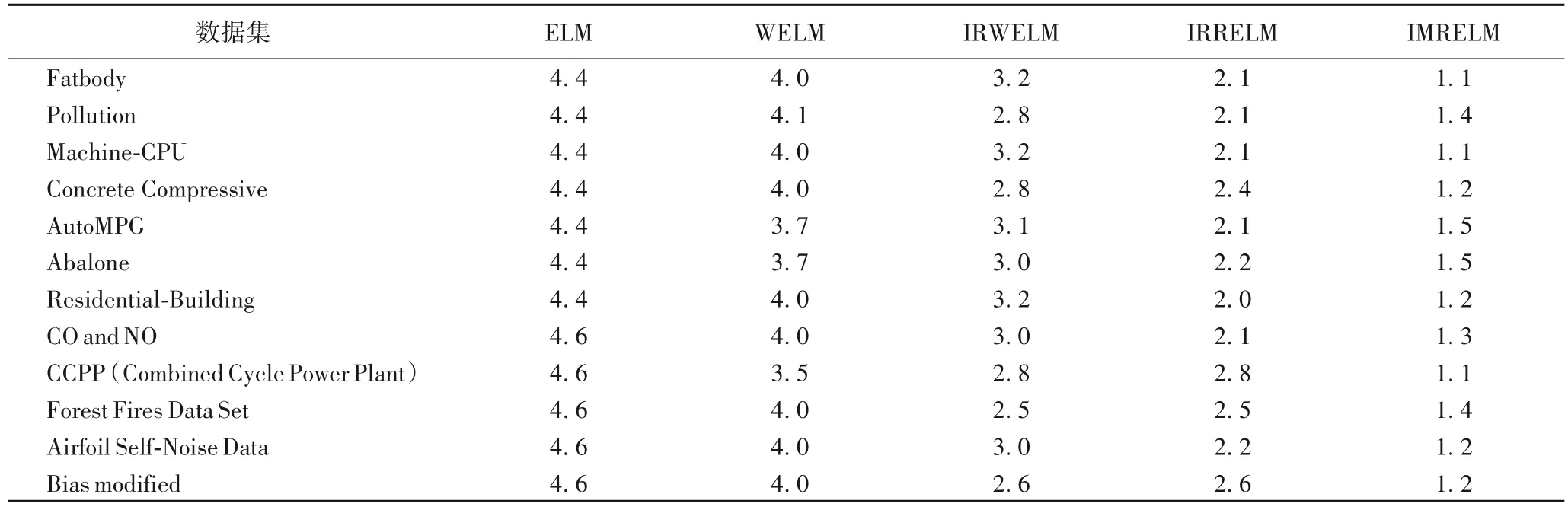
表4 五種算法在12個真實數據集上的平均序值Tab.4 Average order values of five algorithms on 12 real datasets
綜上,可以得到IMRELM 在含有異常點的數據集上的預測精度最好。
4 結語
在實際應用的真實數據集中往往含有離群值,這會導致ELM 的泛化性能較差。為了抑制異常點的負面影響,提高ELM 的魯棒性,提出了迭代修正魯棒極限學習機(IMRELM)算法,使用迭代重加權的方法進行優化。IMRELM 在每次迭代中將離群值的權值設為0,并重新進行標簽賦值。因此,最小化目標函數時不涉及離群值,可以增強ELM 的魯棒性。在1 個人工數據集和12 個不同離群值水平的真實數據集上的對比實驗結果表明,IMRELM 具有良好的預測精度和魯棒性。但目前IMRELM 中只考慮了原始ELM 中的L2范數損失函數,在未來的工作中也可以拓展到其他ELM 變體中的損失函數,如Huber 損失極限學習機、L1范數損失極限學習機和鉸鏈損失極限學習機,以獲得穩健的極限學習機模型。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55