
基于蒙特卡羅的多連桿伺服機械裝置性能優化設計
2023-05-28 01:26:56汪曄
環境技術 2023年4期
汪曄
(東莞市南博職業技術學校,東莞 523000)
引言
隨著大量新技術的應用,多連桿伺服機械裝置性能逐漸得到優化,機械裝置設備整合度增加,機械裝置系統容錯度降低。一方面,機械裝置設備中的高、低、中壓側設備大幅度增加,內部復雜度增加,另一方面,機械裝置設計復雜度伴隨著三集五大思想,設備運行環境復雜度的增加速度逐年加快。在高復雜度環境中,傳統的可靠性評估模型的自身可靠性降低,所以,研究一種更能適合高復雜度評估環境的伺服機械裝置可靠性評估環境成為當前的技術升級需求。李廣儒(2021)等針對機械裝置系統設計了一套自動化可靠性評估系統,以期達到一定自身可靠性的裝置設計可靠性評估系統[1]。徐天寒(2021)等使用Markov 對機械裝置系統的間隔層和過程層進行可靠性評估[2]。苗興園(2020)使用全壽命周期成本管理模型對多連桿伺服機械裝置的性能進行了可靠性評估[3]。
蒙特卡羅模型(MCS)是一種基于隨機抽樣的概率描述模型,可以用于評估復雜度較高的系統可靠性。呂煒楓(2020)等研究了一種基于蒙特卡羅的伺服機械裝置性能可靠性分析方案[4]。王麗燕(2020)研究了一種使用蒙特卡羅的伺服機械裝置性能的評估方案[5]。
相關文獻進行機械裝置性能可靠性評估中,均主要針對機械裝置的特定子系統或特定邏輯層進行評估,以期降低評估過程的高復雜度帶來的數據混沌。該研究核心創新點是將蒙特卡羅模擬算法應用到多連桿伺服機械裝置的性能評估中,有利于提升多連桿伺服機械裝置性能評估的條理性,屬于認知性人工智能的技術范疇,將改變以往通過通用人工智能系統的評價精度較低的問題。本文重點解決多連桿伺服機械裝置整體評估的評估方法和性能優化方法。
1 蒙特卡羅模型的核心算法架構
使用蒙特卡羅模型對多連桿伺服機械裝置可能發生的故障可能性進行分解,而非通過對多連桿伺服機械裝置結構和邏輯拓撲進行分解的方式獲得多連桿伺服機械裝置的可能故障。即對多連桿伺服機械裝置來說,主要的故障來自于多連桿機械設備的運行故障,這也是其故障的主要類型。
如果采用全仿真模擬的方式獲取多連桿伺服機械裝置故障的仿真過程,在高復雜度的機械架構下,其可靠性評估過程本身可靠性存疑。故采用隨機取樣法支持的蒙特卡羅模型在Python 平臺的支持下進行機械裝置故障仿真模擬,以直接針對故障概率統計本身對系統進行故障模擬,以獲得系統可靠性,是當前評估過程本身可靠性的有效保障。采用蒙特卡羅算法構建模型,對多連桿伺服機械裝置的故障進行計算,其計算流程如圖1 所示。
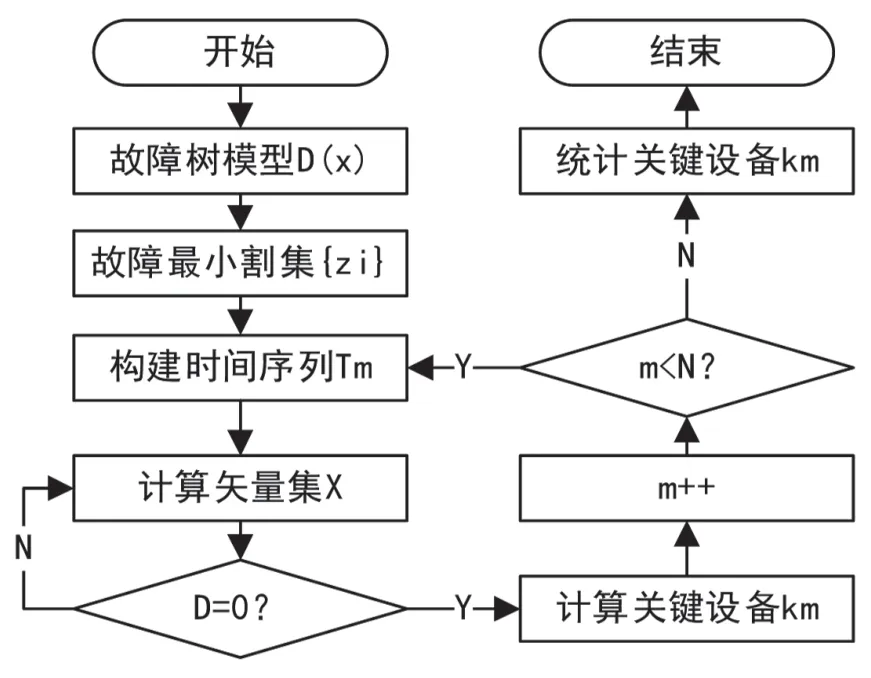
圖1 蒙特卡羅模型核心算法示意圖
圖1 中,為了評估多連桿伺服機械裝置結構的性能,對多連桿伺服機械裝置的故障進行分析,采取蒙特卡羅算法構建的模型進行裝置的故障模擬。①構建多連桿伺服機械裝置的蒙特卡羅算法進行故障模擬,基于總仿真次數N,初始化狀態下m=0,其結構函數為D(x);②將蒙特卡羅算法的所有割集求出,構建最小割集集合{zi};③隨機抽樣原則下構建蒙特卡羅模型,自變量為仿真過程的時間線變量,隨機抽樣后沿升序排列,構成時間序列Tm;④限定tj=r′j,每個蒙特卡羅算法最小割集{zi}中的狀態向量集,構建算法函數下的狀態向量集支持的蒙特卡羅模型D(→),當D=0 時,迭代下一個循環,否則執行下一步;⑤在時間線自變量控制下統計D 值,對系統內失效關鍵設備Fk ∶rk 進行統計,當m+1<N 時回滾至第3 步執行,否則匯總仿真結果并輸出。
2 多連桿伺服機械裝置的蒙特卡羅模型建立
2.1 蒙特卡羅模型的構建
根據前文分析,針對多連桿伺服機械裝置的連桿設計,可以建立如下的蒙特卡羅模型:
其中:
F(h)—多連桿伺服機械裝置的連桿設計函數;
F(m)—機械裝置的故障函數;
F(l)—多連桿連接設備的故障函數;
在此模型上以多連桿伺服機械裝置的連桿設計函數為例,還牽扯到機械裝置的故障和多連桿連接設備的故障,即:
其中:
AI( x ), BI( x), CI( x)—機械裝置的故障函數;
AII( x ), BII( x), CII( x)—多連桿連接設備的故障函數。
針對機械裝置的故障、多連桿連接設備的故障函數的分解方法,同樣可以根據分段和各連接機構故障進行相應分解。
根據多連桿伺服機械裝置的運行數據,設定對應連桿連接設備的平均無故障運行時間為TMTTF,平均故障修復時間為TMTTR,對此兩變量進行統計分析,可以得到系統的運行時間和修復時間的分布圖,得到其概率分布函數F(x):
對其運行狀態進行數值量化分析,當其正常運行時,設定F=1,當其處于故障狀態時,設定F=0,通過觀察F值判定多連桿伺服機械裝置運行的穩定性。
2.2 數據仿真過程
使用蒙特卡羅模擬法對多連桿伺服機械裝置進行性能指標計算和可靠性評估,仿真平臺為Python,其具體仿真流程如下:
1)將歷史數據進行同構化及歸一化處理,構建分析原始數據庫;
2)確定模擬的時間周期和模擬步長;
3)根據蒙特卡羅模型,系統初始化并進行數據模擬仿真,統計仿真過程中的多連桿伺服機械裝置故障率和連桿運行狀態恢復時間周期;
4)根據仿真結果繪制F-T 圖和Q-T 圖;
5)根據F-T 結果和Q-T 結果對多連桿伺服機械裝置的性能做出評估;
對多連桿伺服機械裝置的分析時間周期為3 年26 280 h,統計裝置平均無故障時間和故障率,得到表1。
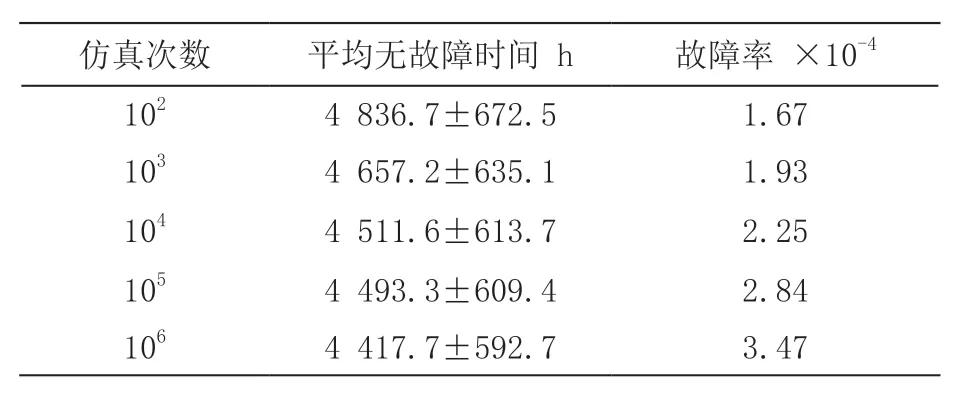
表1 不同仿真次數下的仿真結果對比表
如表1,隨著仿真次數從102 次到106 次,平均無故障時間從4 836.7 h 向4 417.7 h 收斂,而裝置運行系統故障率從1.67×10-4向3.47×10-4收斂,可見為提升仿真的效率,提升仿真次數可以獲得自身可靠性更高的評估。
本文多連桿伺服機械裝置系統的平均無故障時間小于(4 417.7±592.7)h,而故障率大于3.47×10-4,使用相同方式對連桿連接機構進行仿真分析,仿真次數為106,結果詳見表2。
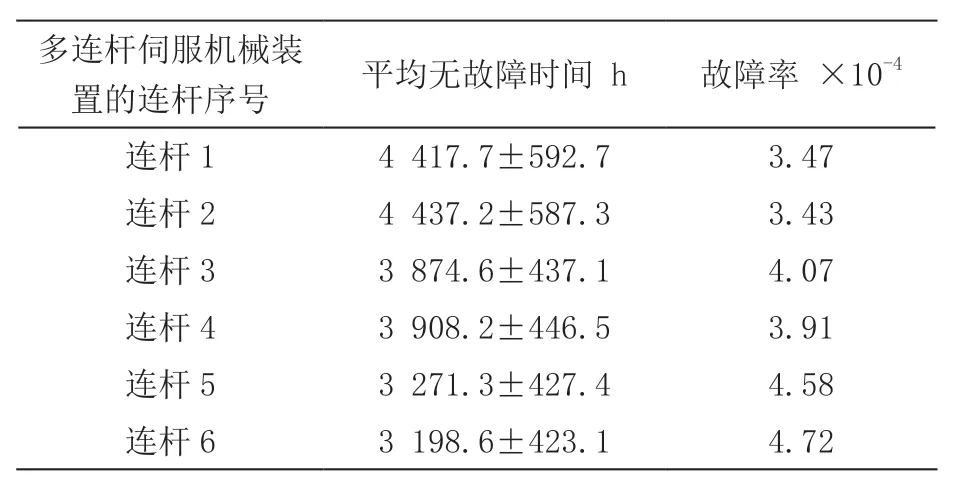
表2 考察連桿連接機構的F-T 分析結果表
根據多連桿伺服機械裝置系統安全的木桶法則,系統中最薄弱環節決定了系統的可靠性,且連桿1 和連桿2 的故障大概率導致這兩段連桿相互連接機構的故障,所以故障率最高的連桿6 的F-T 結果,可以確定多連桿伺服機械裝置系統的可靠性。
使用蒙特卡羅模擬法對時間周期上的Q-T 圖進行繪制,如圖2。
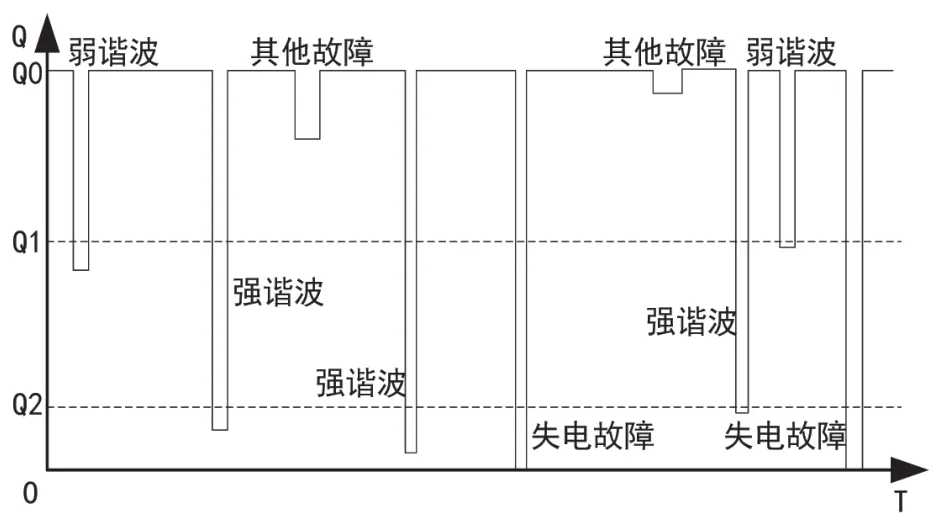
圖2 Q-T 分析結果局部
圖2 中,當系統Q 值運行在Q0 級別上時,認為多連桿伺服機械裝置系統系統處于正常運行狀態,而當Q<Q2 時,認為系統發生了強諧波故障,當Q=0 時,認為裝置系統發生了失電故障,當系統運行在Q1<Q<Q2 時,認為系統發生了弱諧波故障,當系統運行在Q0<Q<Q1 時,認為系統發生了其他故障。
使用該方法對多連桿伺服機械裝置3 年內6 段連桿的實際運行狀態進行分析,其結果如表3。
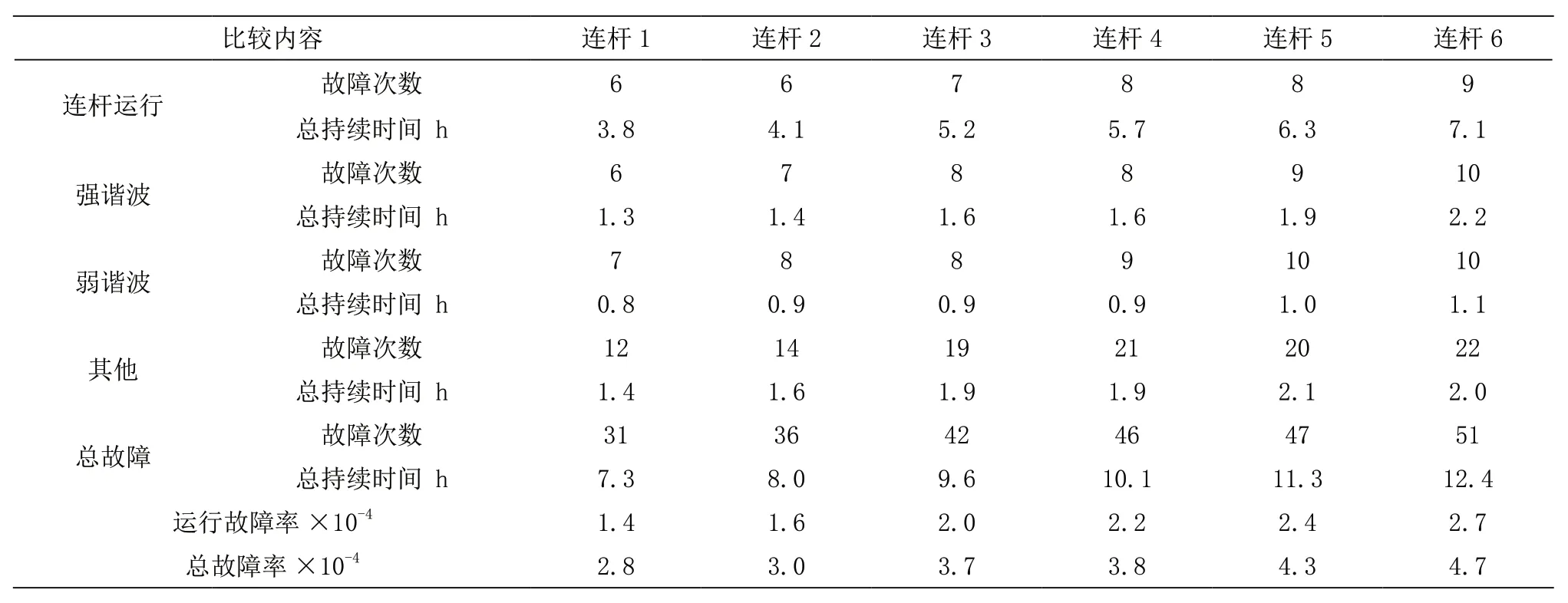
表3 考察多連桿伺服機械裝置連桿的Q-T 分析結果
2.3 基于蒙特卡羅模型的多連桿伺服機械裝置性能的可靠性評估
對上述多連桿伺服機械裝置運行過程中的兩個故障率分析結果進行匯總,可得表4。
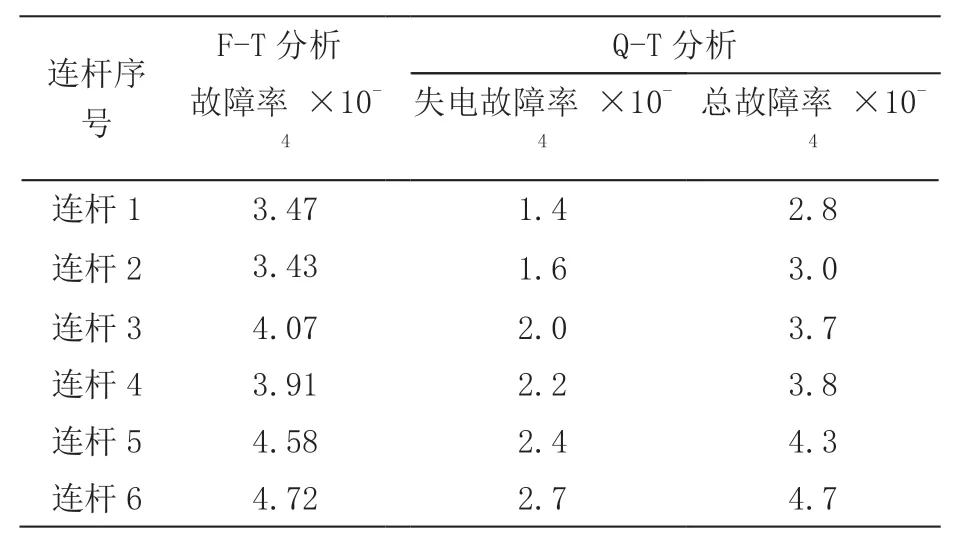
表4 多連桿伺服機械裝置運行故障率分析結果匯總表
從表4 中可以看到,F-T 分析的故障率分析結果與Q-T 分析中的總故障率分析結果較為接近,而Q-T 分析中的失電故障率分析結果遠小于另兩者。單純性在上述結果中選擇某一項故障率分析結果對系統可靠性做出評估,評估過程的自身可靠性存疑。故采用加權指標法對其進行匯總。
即:
其中:
A1—F-T 分析的故障率傳導的可靠性評估;
A2—Q-T 分析的連桿結構故障率傳導的可靠性評估;
A3—Q-T 分析的總故障率傳導的可靠性評估。
根據不同連桿運行可靠性對多連桿伺服機械裝置系統可靠性的影響,將上述6 個連桿的評估結果進行加權分析,可得:
將上述6 個連桿機構分為三段,式中:
Ah1, Ah2—第一段連桿的可靠性,即連桿1 和連桿2的可靠性;
Am1, Am2false 分別為第二段連桿的可靠性,即連桿3 和連桿4 的可靠性;
Al1, Al2false 分別為第三段連桿的可靠性,即連桿5 和連桿6 的可靠性;
結合公式(3),故障率向可靠性的傳導函數可寫做:
各連桿可靠性因子可傳導為表5。
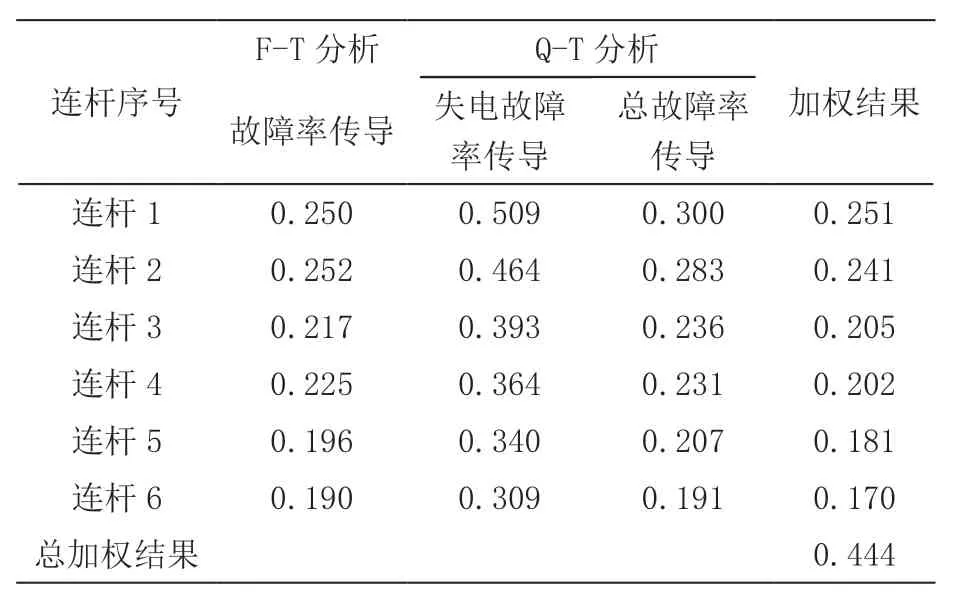
表5 連桿可靠性因子傳導結果表
3 多連桿伺服機械裝置性能可靠性評估結果的意義
本文是在蒙特卡羅模型下的可靠性評估結果,屬于對多連桿伺服機械裝置故障率分析結果的負倒數冪投影,屬于中深度挖掘數據結果,且不同連桿架構下的綜合評估結果因為連桿結構層次和加權權重分配方式的不同各有不同。所以,其本身對反應多連桿伺服機械裝置性能的可靠性無統計學意義,且不同機械裝置之間無法通過比較其可靠性結果得到不同機械裝置的可靠性差異,但其變化趨勢對多連桿伺服機械裝置性能可靠性評估有積極意義。即在移動時間窗口下,當該評估結果上升時,多連桿伺服機械裝置的綜合故障率下降,反之,多連桿伺服機械裝置的綜合故障率上升。
所以,構建多連桿伺服機械裝置在一定周期的移動分析窗口,即在分析當前數據時,向后選取一定周期的分析數據,如90 天~180 天數據,根據該數據動態計算多連桿伺服機械裝置性能的可靠性評估結果,其分析結果如圖3。
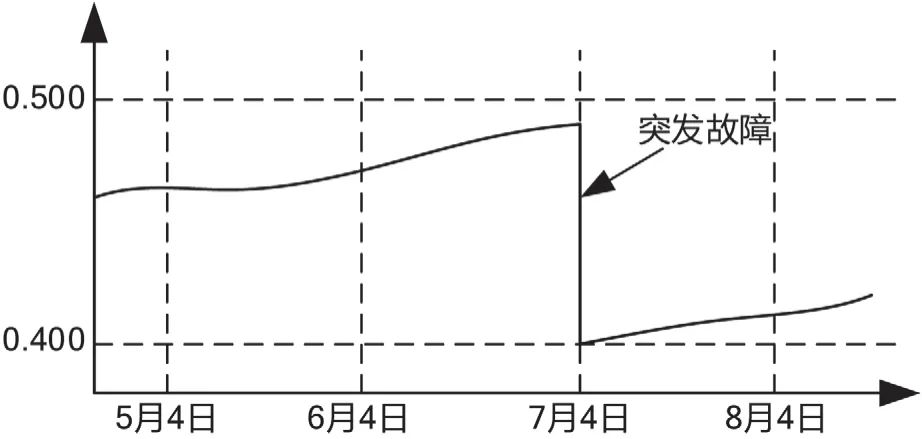
圖3 移動窗口下的可靠性評估結果示意圖
圖3 中,由于該多連桿伺服機械裝置在運行的過程中突發機械故障,故障影響時間為47 min(0.783 h),所以導致該多連桿伺服機械裝置可靠性評估結果從0.492陡跌至0.403,但因為算法影響,多連桿伺服機械裝置無故障運行時間增加的過程會導致該裝置可靠性評估結果累積上升。即2019 年5 月4 日評估結果為0.469 而至2019 年7 月4 日故障發生前沿上升至0.492,事故發生后,該評估結果下跌至0.403 而至2019 年8 月4 日,該評級結果恢復至0.416,評估結果中可以看出多連桿伺服機械裝置的運行狀態和性能,根據相應的數據進行機械裝置的性能優化。
4 總結
基于蒙特卡羅模型的多連桿伺服機械裝置性能優化設計,根據上述多連桿伺服機械裝置可靠性分析結果,與裝置系統的故障發生周期負相關,與故障影響范圍負相關,與無故障運行時間正相關。隨著系統無故障運行時間持續增長,系統的可靠性評估結果也在移動窗口中持續增長,當多連桿伺服機械裝置小規模故障發生時,將影響該可靠性評估結果的增長過程,當大規模故障發生時,會導致該評估結果陡降。所以該評估結果對多連桿伺服機械裝置的性能優化和可靠性設計有一定的敏感性。
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
當代工人(2020年8期)2020-05-25 09:07:38
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
山東工業技術(2016年15期)2016-12-01 05:31:22
科技知識動漫(2016年8期)2016-07-29 20:40:09
汽車維護與修理(2016年10期)2016-07-10 08:17:41
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
