
基于模糊神經(jīng)網(wǎng)絡(luò)的電動汽車變速器故障檢測研究
2023-05-28 01:26:56魯明旭曹宇
環(huán)境技術(shù) 2023年4期
魯明旭,曹宇
(上海城建職業(yè)學(xué)院 人工智能應(yīng)用學(xué)院,上海 201415)
引言
變速器作為電動汽車中不可或缺的重要部件,隨著科技的日新月異與工業(yè)的迅猛進(jìn)步,變速器的設(shè)計(jì)與制造技術(shù)持續(xù)上升,變速器的構(gòu)造愈來愈繁瑣,故障的原因及現(xiàn)象也呈現(xiàn)多元化、不可控等趨勢,所以正確地診斷電機(jī)故障并及準(zhǔn)時地修復(fù)故障具有重大含義。
何雷等用LMD 與BP 神經(jīng)網(wǎng)絡(luò)方法對變速器的故障進(jìn)行診斷,該方法將噪音協(xié)助解析法、部分平均值轉(zhuǎn)化法和BP 神經(jīng)網(wǎng)絡(luò)相互融合,提高故障診斷的正確率,但采集故障輸入信號的過程十分復(fù)雜[1];吳又新等提出基于遺傳算法及樣本熵優(yōu)化VMD 參數(shù)的故障診斷方法,以建立的WOA-KELM 故障識別模型為基礎(chǔ),將樣本熵優(yōu)化VMD 參數(shù)加入遺傳算法中從而診斷變速器故障,雖然此方法樣本熵的維度小,但識別診斷變速器故障精度較低[2]。
由于汽車變速器的復(fù)雜結(jié)構(gòu),在其故障原因認(rèn)知、不同故障信號獲取以及分析故障中存在諸多模糊性問題,所以傳統(tǒng)的故障診斷方法未能為我們提供實(shí)質(zhì)性的故障分析。為避免現(xiàn)有研究的劣勢,及變速器故障的模糊性,模糊診斷技術(shù)成為解決此類模糊問題實(shí)為不二之選。其中由模糊診斷技術(shù)和神經(jīng)網(wǎng)絡(luò)組成的模糊神經(jīng)網(wǎng)絡(luò),既具備處理不確定性問題優(yōu)勢,又具備較強(qiáng)的自適應(yīng)學(xué)習(xí)能力,可作為解決模糊診斷問題首選。因此本文提出基于模糊神經(jīng)網(wǎng)絡(luò)的電動汽車變速器故障檢測方法,提升電動汽車變速器的故障診斷準(zhǔn)確率,從而獲得高效率的故障診斷。
1 基于模糊神經(jīng)網(wǎng)絡(luò)的電動汽車變速器故障檢測
采用模糊神經(jīng)網(wǎng)絡(luò)對電動汽車變速器故障檢測的過程中,需要先了解變速器的故障原因及故障現(xiàn)象,在此基礎(chǔ)上進(jìn)行電動汽車變速器故障檢測研究。
1.1 電動車變速器的故障原因以及故障現(xiàn)象
1.1.1 電動車變速器的故障原因
通過變速器中變速桿方位信號、進(jìn)氣壓力信號、發(fā)動機(jī)信號、節(jié)氣門信號、車速度信號、變速器主軸轉(zhuǎn)動速率以及冷凝溫等信號,電動汽車即可展現(xiàn)自動變換擋實(shí)時掌握、變矩器的固定、安全失效庇護(hù)和故障暴露以及自判斷等性能[3,4]。當(dāng)以上所提信號出現(xiàn)異常時,自動變速器的故障現(xiàn)象也隨之產(chǎn)生。
1.1.2 自動變速器的故障現(xiàn)象
自動變速器故障主要分為液壓系統(tǒng)、電子系統(tǒng)和機(jī)械方面三大故障。液壓系統(tǒng)故障包含油路壓強(qiáng)過低、ATF 油質(zhì)變等;電子系統(tǒng)類故障由換擋電磁閥、壓迫掌控電磁閥以及車速傳感器等類故障構(gòu)成;制動器及調(diào)壓閥故障和離合器消耗及滑出故障等屬于機(jī)械方面故障。
1.2 模糊診斷技術(shù)
生活中經(jīng)常會有無法闡述基本概念的模糊消息,為解決此類模糊消息,模糊思維應(yīng)運(yùn)而生。以下是模糊思維解決模糊消息的4 個步驟。
1)創(chuàng)建準(zhǔn)確模糊集合:通過多樣模糊準(zhǔn)則創(chuàng)建不同角度描述模糊集合,模糊化的進(jìn)程用詳細(xì)數(shù)字描述。
2)建立輸入?yún)⒘浚涸谀:郎?zhǔn)則設(shè)置的基本要求下,建立變速器油路故障模型的輸入?yún)⒘俊?/p>
3)明確隸屬度:通過隸屬度函數(shù)和模糊準(zhǔn)則的輸出結(jié)果,分別構(gòu)造輸入信號隸屬度以及模糊集合。
4)獲得結(jié)果:采用去模糊化管理所創(chuàng)建的模糊集合,獲取需求的結(jié)果。
1.3 BP 神經(jīng)網(wǎng)絡(luò)概述
BP 神經(jīng)網(wǎng)絡(luò)是一種多層型神經(jīng)網(wǎng)絡(luò),該網(wǎng)絡(luò)被多數(shù)領(lǐng)域所采用,比如函數(shù)逼近、模式辨識及歸類等。因?yàn)锽P 神經(jīng)網(wǎng)絡(luò)中的傳輸函數(shù)可使用非線性函數(shù),所以對汽車變速器故障檢測具有顯著效果[5]。BP 神經(jīng)網(wǎng)絡(luò)由輸入層、隱含層以及輸出層構(gòu)成,一定數(shù)量的節(jié)點(diǎn)存在每一層中,除層內(nèi)節(jié)點(diǎn)之間,權(quán)重矩陣W 將層和層間的節(jié)點(diǎn)相互關(guān)聯(lián);每個偏移量對應(yīng)每個節(jié)點(diǎn),這些節(jié)點(diǎn)的全部偏移量則組成一個偏移向量B。偏移向量B 和權(quán)重矩陣W 作為兩個重要參量存在BP 神經(jīng)網(wǎng)絡(luò)中,因此,找尋恰當(dāng)?shù)牡哪P蛥⒘縒、B 是實(shí)現(xiàn)BP 神經(jīng)網(wǎng)絡(luò)輸出最佳結(jié)果的重要保障。圖1 表示BP 神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)。輸入向量組和輸出向量組分別用 P= [p1, p2,...,pn]以及Y=[y1, y2,..., yn]描述; wij、 wjk、 bij和 bjk分別表示輸入層權(quán)值、隱含層的權(quán)值、輸入層閾值以及隱含層閾值。通過BP 神經(jīng)網(wǎng)絡(luò)進(jìn)行汽車變速器故障檢測,離不開收納訓(xùn)練樣本、構(gòu)建神經(jīng)網(wǎng)絡(luò)、訓(xùn)練神經(jīng)網(wǎng)絡(luò)以及測試神經(jīng)網(wǎng)絡(luò)4 個方面。
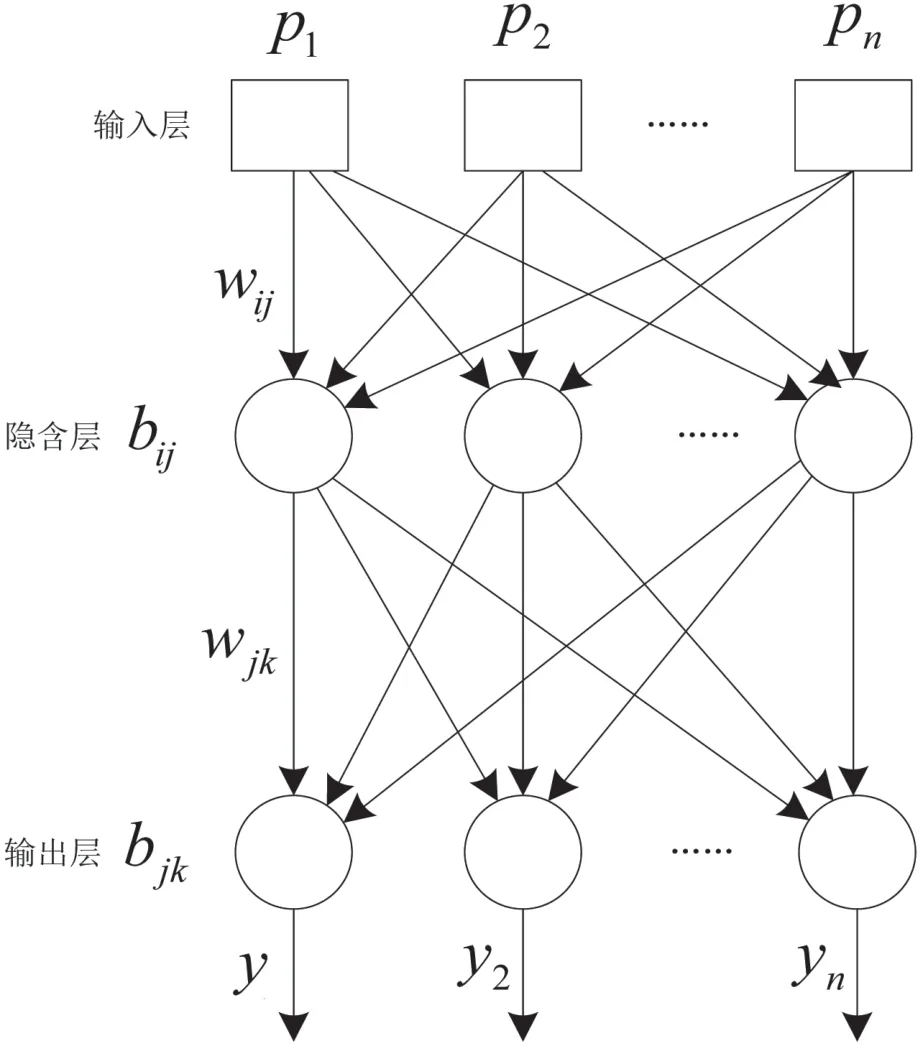
圖1 BP 神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)
1.3.1 BP 算法訓(xùn)練流程
BP 神經(jīng)網(wǎng)絡(luò)訓(xùn)練流程由兩方面構(gòu)成,一方面是正向計(jì)算,另一方面是反向計(jì)算[6]。
1)正向計(jì)算
訓(xùn)練樣本在正向計(jì)算中以輸入層為起點(diǎn),輸出層為終點(diǎn),流經(jīng)全部BP 神經(jīng)網(wǎng)絡(luò)。通過計(jì)算上一層的輸入與相關(guān)模型參量,獲取每一層各個神經(jīng)元的激活值。通過公式(1)可得正向計(jì)算中隱含層和輸出層神經(jīng)元激活值, hi、分別代表第i 層網(wǎng)絡(luò)所含的節(jié)點(diǎn)數(shù)目以及第i層第j 個神經(jīng)節(jié)點(diǎn)的激活值;第i 層第j 個神經(jīng)元的移位值和第i 層第k 個神經(jīng)節(jié)點(diǎn)與第i+1 層第j 個神經(jīng)節(jié)點(diǎn)的權(quán)重系數(shù)分別用、描述。隱含層與輸出層的激活函數(shù)分別使用sigmoid 和softmax 函數(shù)。
2)反向計(jì)算
通過反向計(jì)算中輸出層激活值和訓(xùn)練樣本標(biāo)識對比獲取誤差值,對相關(guān)W 和B 采用梯度下降法進(jìn)行修整并使誤差以降低的角度前進(jìn)[7,8],其次將誤差通過每一層反向遞進(jìn)的方式來修改每一層的模型參量。通過公式(2)可算出反向運(yùn)算中隱含層和輸出層的節(jié)點(diǎn)誤差值。樣本點(diǎn)標(biāo)識值用zj描述,該值會和輸出層的激活值進(jìn)行比對,隱含層與輸出層激活函數(shù)的導(dǎo)函數(shù)分別是sigmoid 和softmax。
式中:
通過已獲取的每個神經(jīng)元誤差對相關(guān)的網(wǎng)絡(luò)參量開始修整,使用公式(3)確定W 和B 的更新規(guī)定,在整理算法的收斂速率過程中,迭代的次數(shù)和學(xué)習(xí)率分別用t和η 描述。
1.3.2 確定隱含層神經(jīng)元數(shù)量
在BP 神經(jīng)網(wǎng)絡(luò)中,隱含層神經(jīng)元個數(shù)對其輸出的結(jié)果精確及范圍產(chǎn)生不可忽略的影響[9]。隱含層神經(jīng)元數(shù)、輸入層神經(jīng)元數(shù)和輸出層神經(jīng)元數(shù)分別是m、n 和l,取整函數(shù)采用round。確定隱含層神經(jīng)節(jié)點(diǎn)數(shù)的方式是公式(4):
本文選取上述公式中一個,用公式(5)表示,以此確定隱含層節(jié)點(diǎn)數(shù),通常選取較小數(shù)為隱含層神經(jīng)元數(shù)。
1.4 變速器油路故障診斷模型
將變速桿方位信號和發(fā)動機(jī)轉(zhuǎn)速信號作為變速器油路故障診斷模型中的輸入信號,油路壓強(qiáng)數(shù)值和油路液面位置為輸出信號,根據(jù)不同種類的隸屬度區(qū)別實(shí)施數(shù)據(jù)模糊化處置并獲取訓(xùn)練樣本數(shù)據(jù)。訓(xùn)練網(wǎng)絡(luò)和測試數(shù)據(jù)分別用所得訓(xùn)練樣本數(shù)據(jù)中的80 %以及20 %。以創(chuàng)建變速器油路故障診斷模型為基礎(chǔ)[10],通過模糊集合表示法描述變速器油路故障隸屬度,使變速器故障現(xiàn)象和故障原因二者合一,概括4 種故障現(xiàn)象以及2 種重要故障原因分別用表1 和表2 描述。
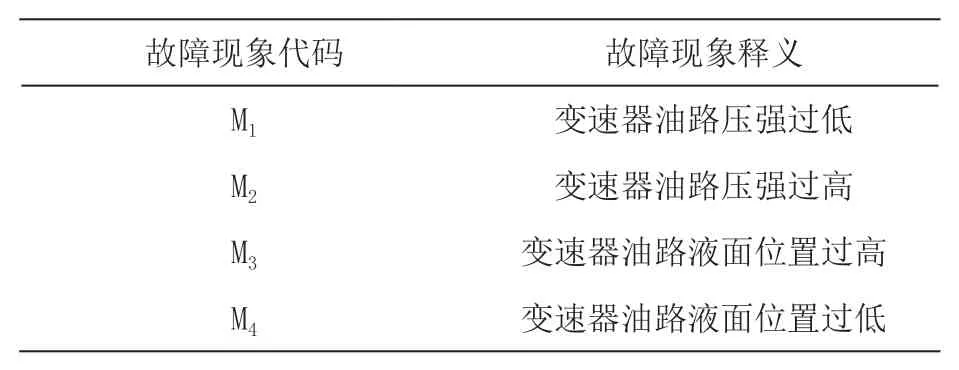
表1 故障現(xiàn)象表
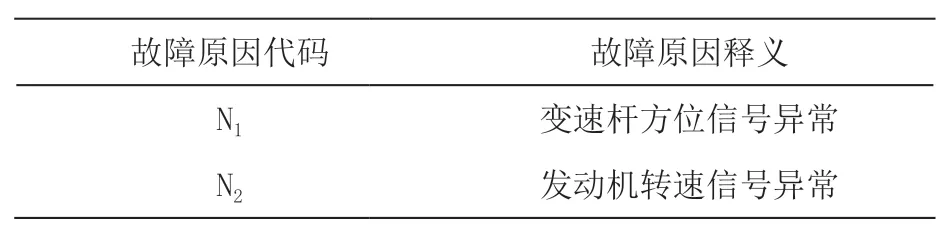
表2 故障原因表
那么根據(jù)公式(6)和公式(7)確定故障原因模糊集合Ni以及故障現(xiàn)象模糊集合Mi:
Uyi和Uxi分別是和該故障原因之間的隸屬度以及和該故障現(xiàn)象之間的隸屬度。
故障原因和故障現(xiàn)象二者間的相互關(guān)聯(lián),即模糊準(zhǔn)則。通過模糊理論中的“if-then”規(guī)定處理故障原因和故障現(xiàn)象之間的關(guān)聯(lián)[11],這個“if-then”規(guī)定是“if α and β,then γ ”,變量用α 和β 表示,α 和β 協(xié)同配合下的效果用γ 表示。表3 為故障現(xiàn)象 M1~ M4和故障原因 N1~N2的關(guān)聯(lián)信息。
隸屬度函數(shù)的形態(tài)大致有矩形遍布、正態(tài)遍布以及梯形遍布等,結(jié)合本文分析,變速器油路故障隸屬度函數(shù)是梯形遍布形態(tài)[12]。下文是詳細(xì)步驟:變速器液壓系統(tǒng)中油路壓強(qiáng)是(1.08~1.47)MPa,最小壓強(qiáng)和最大壓強(qiáng)分別是1.08 MPa 以及1.47 MPa,因此將(0.0~1.47)MPa 設(shè)定成變速器油路故障,用x 和A 分別表示油路壓強(qiáng)參量及變速器油路壓強(qiáng)過低模糊集合。通過公式(8)獲得變速器油路故障隸屬函數(shù) A ( x ):
B 代表變速器油路故障模糊集合,此集合包含變速器油路壓強(qiáng)過大、油路壓強(qiáng)過低等[13],通過公式(9)獲得變速器油路壓強(qiáng)變化程度 Δn 。
變速器先后2 次收集的油路壓強(qiáng)數(shù)據(jù)分別用 ni和ni+1描述。
公式(10)為變速器油路壓強(qiáng)變化程度隸屬函數(shù)B(x):
綜上,獲取變速器故障為(0.0~1.0),設(shè)置變速器故障的3 個級別,分別是強(qiáng)(0.7~1.0)、中(0.4~0.6)以及弱(0.0~0.3)。從訓(xùn)練得出的樣本數(shù)據(jù)抽取80 %作訓(xùn)練數(shù)據(jù)并被訓(xùn)練過程中對神經(jīng)網(wǎng)絡(luò)各節(jié)點(diǎn)的權(quán)值更新所用[14],試驗(yàn)、檢驗(yàn)?zāi)P托Ч褂糜嘞掠?xùn)練樣本數(shù)據(jù)的20 %。
2 仿真測試與分析
以使用097 自動型變速器的某品牌電動汽車作為本次試驗(yàn)對象。變速器結(jié)構(gòu)包括液壓變矩器、齒輪結(jié)構(gòu)、液壓系統(tǒng)及驅(qū)動控制系統(tǒng)等。圖2 為097 型自動變速器外貌。
圖2 097 型自動變速器
為驗(yàn)證本文方法下變速器油路故障診斷模型輸出結(jié)果真實(shí)性。將采集到的該電動汽車變速器的100 組故障樣本數(shù)據(jù)隨機(jī)分成20 份,2 份作為測試樣本,18 份為訓(xùn)練樣本,本文方法模型輸入變量是變速器故障現(xiàn)象,輸出變量是變速器故障原因。表4~6 分別表示本文方法模型的測試樣本輸入、希望樣本輸出結(jié)果以及實(shí)際輸出結(jié)果。以表4 數(shù)據(jù)為模型輸入,通過對表5 和表6 分析可知,本文方法的變速器故障檢測結(jié)果與希望輸出結(jié)果基本吻合,更加接近真實(shí)情況,可實(shí)現(xiàn)電動汽車變速器故障的正確檢測。
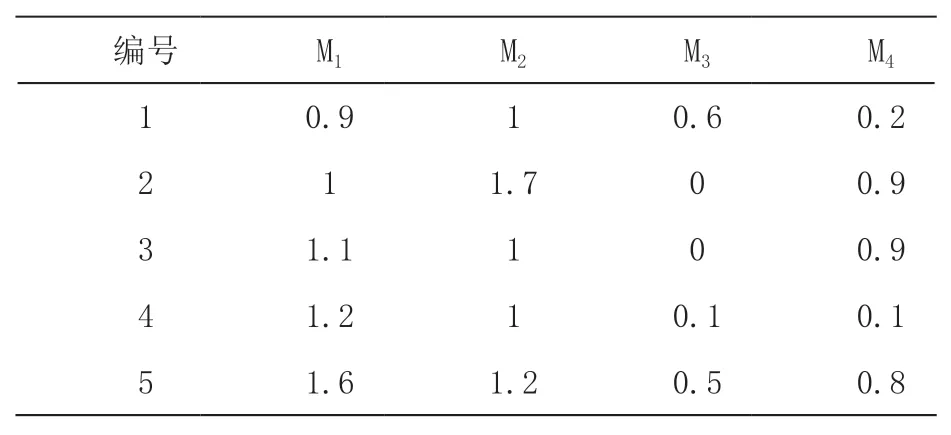
表4 模型測試樣本輸入
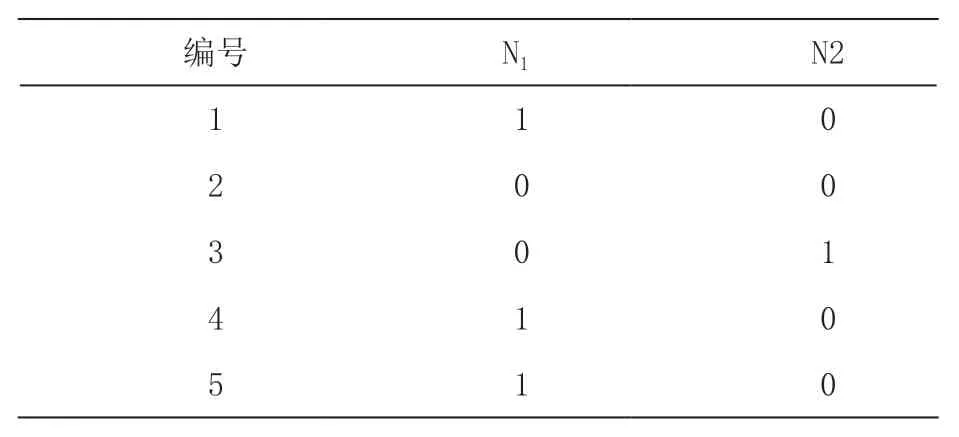
表5 模型希望樣本輸出結(jié)果

表6 模型實(shí)際輸出結(jié)果
為驗(yàn)證本文方法的變速器故障診斷效果,選取文獻(xiàn)[1]結(jié)合LMD 與BP 神經(jīng)網(wǎng)絡(luò)的故障檢測方法和文獻(xiàn)[2]基于特征提取的故障檢測方法為對比,測試三種方法在電動汽車處于不同運(yùn)行工況下的故障的檢測準(zhǔn)確率,結(jié)果用表7 表示。分析表7 可知,不同工況下本文方法的故障檢測準(zhǔn)確率均比文獻(xiàn)[1]和文獻(xiàn)[2]均高,其重要因素離不開本文方法在建立模型進(jìn)程中使用已設(shè)定好的輸入?yún)⒘俊=Y(jié)果說明,本文方法的故障檢測準(zhǔn)確率較高,且適用于多種電動汽車運(yùn)行工況下的變速器故障檢測。
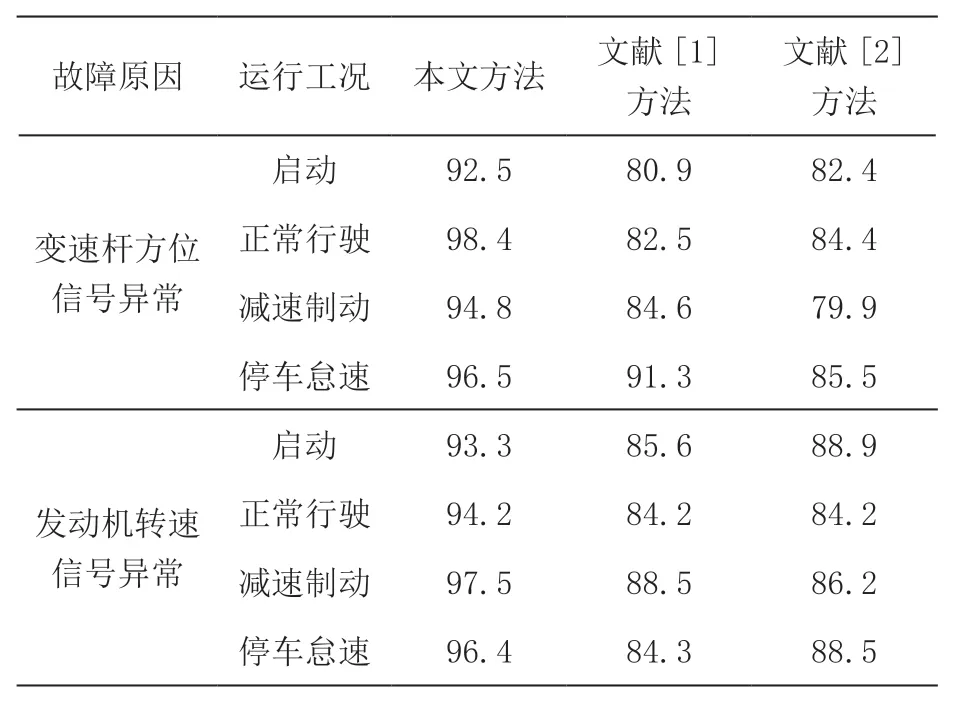
表7 三種方法的故障檢測準(zhǔn)確率對比(%)
在BP 神經(jīng)網(wǎng)絡(luò)中,隱含層神經(jīng)元數(shù)目極其重要,通常隱含層神經(jīng)元數(shù)目過多或過少都會影響B(tài)P 神經(jīng)網(wǎng)絡(luò)輸出結(jié)果。為證實(shí)本文方法中隱含層神經(jīng)元數(shù)目對BP神經(jīng)網(wǎng)絡(luò)輸出結(jié)果的重要性,對同一組訓(xùn)練樣本取不同的隱含層神經(jīng)節(jié)點(diǎn)數(shù),通過修改學(xué)習(xí)率算法,訓(xùn)練目標(biāo)設(shè)為10-5,分別對BP 神經(jīng)網(wǎng)絡(luò)訓(xùn)練2 000 次,隱含層不同數(shù)目的神經(jīng)元訓(xùn)練誤差結(jié)果用圖3描述。分析圖3可知,隱含層神經(jīng)元數(shù)是12時,BP神經(jīng)網(wǎng)絡(luò)訓(xùn)練誤差結(jié)果最小,因此本文方法用12 作為變速器油路故障診斷模型隱含層神經(jīng)元數(shù)目,此刻對電動汽車變速器的故障檢測效果最好。
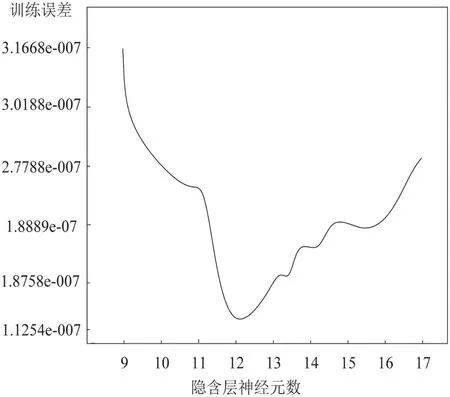
圖3 隱含層不同數(shù)目神經(jīng)元訓(xùn)練誤差結(jié)果
實(shí)驗(yàn)給出本文方法應(yīng)用前后變速器的壽命對比,如圖4 所示。分析圖4 可知,本文方法應(yīng)用下的變速器壽命退化情況顯著優(yōu)于未使用本文方法變速器壽命退化情況,可見,應(yīng)用本文方法進(jìn)行及時的變速器故障診斷,對延緩汽車變速器使用壽命退化情況具有顯著作用。
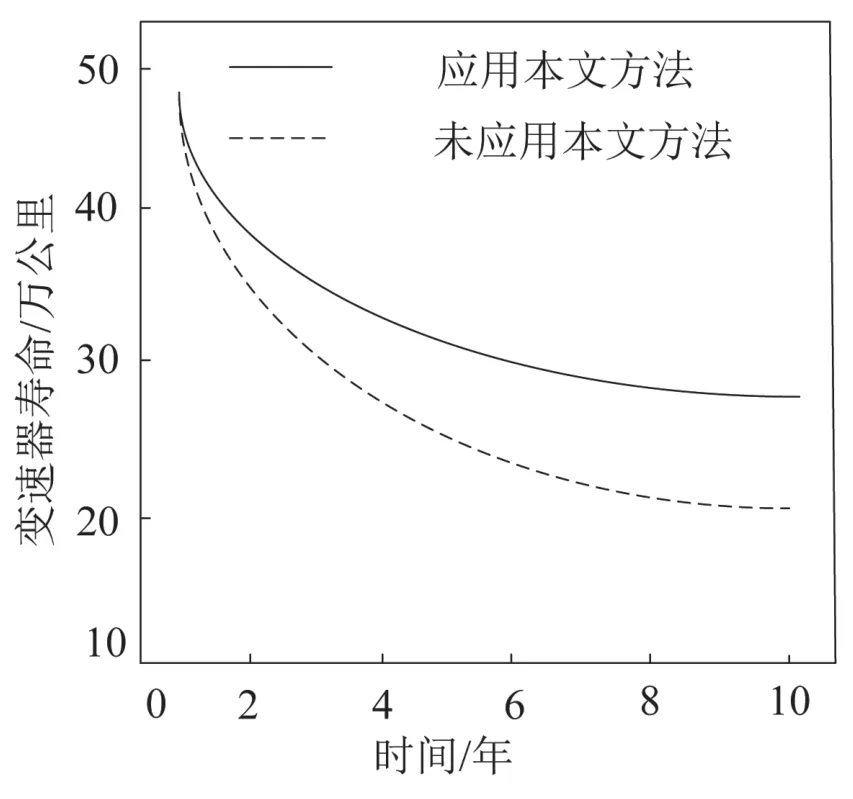
圖4 本文方法應(yīng)用前后變速器的壽命
3 結(jié)論
本文使用模糊神經(jīng)網(wǎng)絡(luò)對電動汽車變速器進(jìn)行故障檢測,在確定隱含層神經(jīng)元的數(shù)量前提下,不僅可以大幅度提高電動汽車變速器的故障檢測正確率,還可延緩電動汽車變速器的使用壽命退化,提升其實(shí)際應(yīng)用性能。希望本文方法在未來可以具備更高的使用價值。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
重慶工商大學(xué)學(xué)報(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
