精密水浴恒溫系統的建模及控制
2023-05-29 05:51:50楊學義魯元昊李思超胡坤艾學忠
電子制作 2023年7期
楊學義,魯元昊,李思超,胡坤,艾學忠
(吉林化工學院 信息與控制工程學院,微機測控裝置與系統研究室,吉林吉林,132000)
水浴鍋、電熱套筒加熱等是普遍的控溫裝置,尤其水浴鍋,在化學是實驗室、化工生產過程中應用十分廣泛,其控制對象精確程度將會影響工業產品的質量,怎樣使控制對象快速達到預期狀態,是我們研究的重點。針對溫度控制的精度和魯棒性研究問題,國內外學者展開大量研究。文獻[1]采用Delta V 控制算法對加熱爐進行控制,雖然操作簡單,但是控制精度不太理想。文獻[2]采用改進蟻群算法來確定PID 的最優值,但是系統在加熱過程中加熱對象達到期望溫度時間較長,且系統實時性不夠好。文獻[3]采用改進粒子群算法控制加熱爐,控制效果不錯,但是該算法容易陷入局部最優,使迭代出來的參數不是最優,文獻[4]采用PI 自整定參數調節控制系統的溫度,該方法大多依賴于工程師的經驗,該算法僅對于某種特定的控制系統有效,文獻[5] 增量式 PID 控制器控制發動機的溫度,該方法在最佳性能下對應的溫度不是定值,存在一定的差異;文獻[6]采用基于模糊PID 減小了爐溫波動,通過Simulink 仿真來模擬實際溫度,目前仍存在被控對象數學模型與實際存在偏差,文獻[7]提出了粒子群優化串級PID 來控制水浴鍋的溫度,可以快速、穩定控制溫度,但是串級控制過程對每個鍋溫度控制比較復雜。文獻[8]采用Smith-模糊PID 控制器用于橡膠擠出機料筒溫度控制,Smith 預估控制可以提前補償溫度滯后現象,文獻[9]提出了一種全階狀態觀測器來控制加熱爐溫度,上述論文提供了極大的參考價值。
為解決仿真中建立的數學模型對水浴鍋加熱中非線性模型存在誤差,提出了在仿真軟件中建立物理模型,來實現溫度在水浴鍋中溫度傳遞,通過Fuzzy-RBF 神經網絡PID算法,將具有自我學習的智能算法和模糊PID 控制器有機結合起來,來控制水浴鍋的溫度,以此達到克服控制過程中的非線性,增強系統的魯棒性,提高系統控制質量,降低了外界變化給系統造成不良影。
1 介質加熱裝置物理模型
水浴鍋加熱裝置主要由控制箱、加熱絲、磁力攪拌器、溫度傳感器、外鍋以及內鍋組成。由于水浴鍋在控制溫度過程中不僅受到外界溫度的影響,還受其自身鍋體體積和材料的影響,推理出擬合度高的數學模型非比較困難。因此,本文提出在仿真軟件中建立水浴鍋傳熱系統物理模型,解決了數學建模困難問題,更貼近于實際情況。
物理模型搭建見圖1 所示,通過穩定加熱源給系統熱量,熱量通過熱傳遞給外鍋內的水,水加熱的過程中向兩個方向進行熱傳導,一個方向是傳遞給外鍋的鋁層,另一個方向傳遞給內鍋的燒杯,最終熱量傳遞給燒杯的水,以此達到溫度控制。經實驗可知,給定溫度信號通過接入PWM 模塊產生脈寬調制信號,信號再經過控制熱流率源產生熱量,熱量經過傳導熱模塊傳遞給熱質量塊,在經過可導熱的管道,使外鍋內的水升溫,鍋內的水通過一個壓力泵實現內循環,外鍋專門有一個導熱口,通過這個口使外鍋的溫度傳遞給內鍋,內鍋與外鍋模型基本一致,在導熱口對接的是外界溫度,為一個蒸發散熱過程。
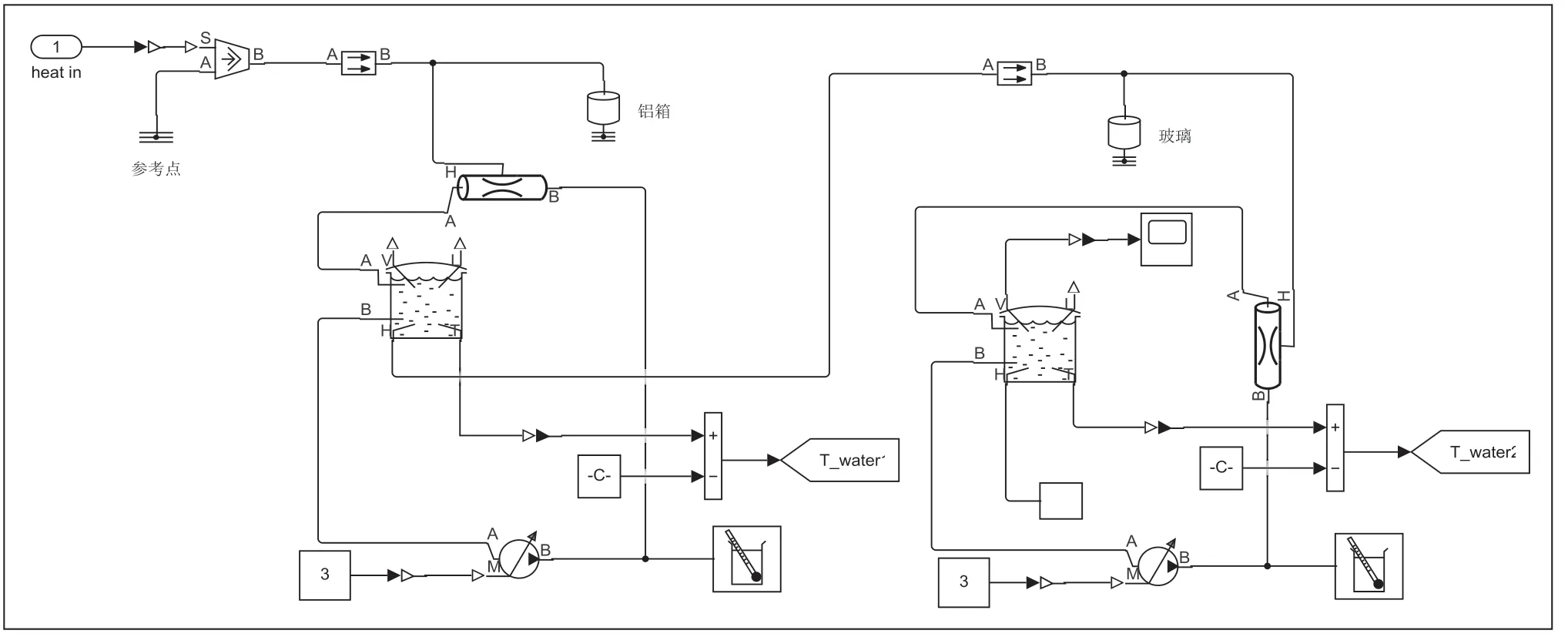
圖1 水浴鍋加熱物理模型
內外鍋傳熱仿真模塊內部見圖2 所示,溫度輸入從TANK(B)端A 端流入,熱源通過TANK(B)的H 口傳遞給TANK(S)的H 端。
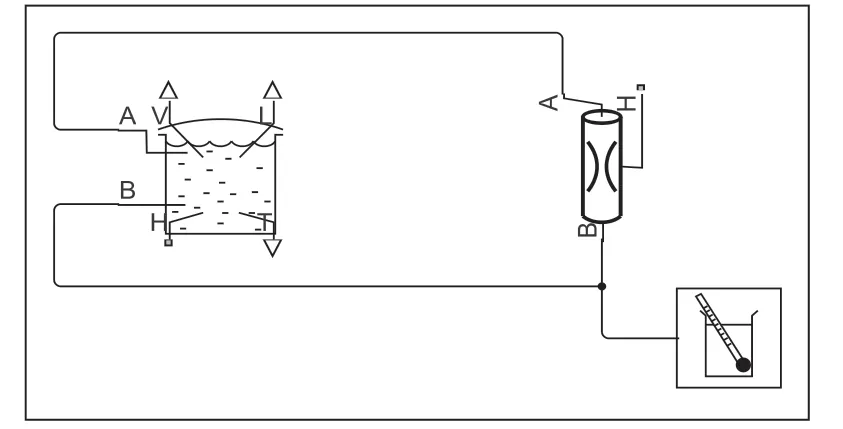
圖2 內外鍋傳熱模型塊
管道能量守恒公式:
熱液與管壁之間的熱流率為:
燒杯內部能量守恒公式:
2 基于Fuzzy-RBF 神經網絡PID 設計
2.1 PID 控制
傳統PID 作為最經典的控制方式,本身有很多優點,結構簡單,調整方便,使用方式是將三個固定的參數比例(kp)、積分(ki)、微分(kd)組合在一起傳遞給被控對象,使系統達到穩定的控制效果。圖3 為傳統PID 控制原理圖。
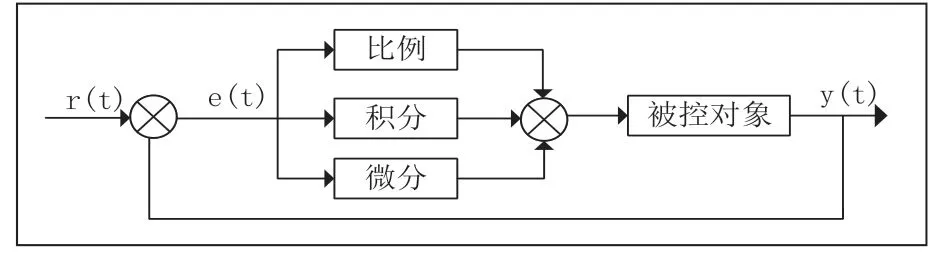
圖3 傳統PID 控制器原理圖
PID 控制器的輸出e(t)與輸出u(t)的關系為[17]:
上式中,Kp是比例系數,Ki是積分系數,Kd是微分系數。
2.2 模糊PID 控制
模糊PID 根據模糊邏輯將輸出值y(t)和給定值r(t)運用模糊規則,經過模糊化、模糊推理、去模糊化三個步驟得到參數通過特定的組合疊加到傳統PID 上,從而達到修正傳統PID 的值,但是模糊PID 對于一些控制系統效果不佳,對于有滯后的、非線性的系統控制起來就顯得吃力,并且模糊PID 中模糊域中參數依賴于工程師的經驗,受人為影響大,這對在以后控制中出現的偏差難以解決,圖4 為模糊PID控制器的結構。
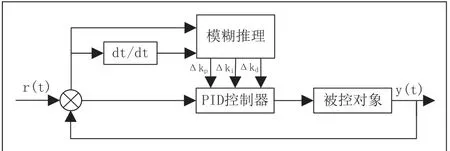
圖4 模糊PID 控制器
2.3 Fuzzy-RBF 神經網絡PID 控制
為了消除模糊 PID 使用時存在人為主觀因素的影響,將模糊控制、RBF 神經網絡和傳統 PID 優點結合到一個控制系統中,使控制系統產生更加穩定的控制效果,見圖5 Fuzzy- RBF 神經網絡 PID 控制器的結構圖,其控制基本原理為:將溫度偏差e(t)與溫度偏差變化率ec(t)輸入到神經網絡中,通過Fuzzy-RBF 神經網絡中模糊控制器的模糊化和模糊推理,對 PID 的三個參數進行在線自我整定,來實現理想的控制效果[12]。
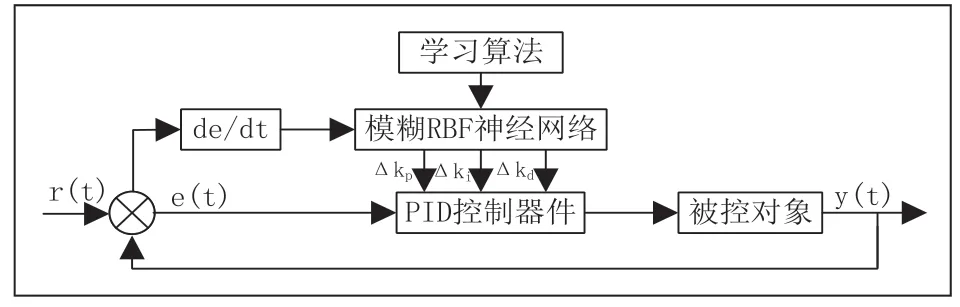
圖5 模糊 RBF 神經網絡 PID 控制器的結構圖
2.4 模糊神經網絡的結構
RBF 神經網絡共有4 個層,分別為輸入層、模糊化層、模糊推理、輸出層,輸入層由兩個節點組成,其作用是接收偏差和偏差變化率,將其傳入下一層模糊化層,主要是根據模糊網絡的規則,將其分為7 個節點,把輸入層的參數生成隸屬度函數,第三層主要是將每個模糊規則的隸屬度函數調節至合適值,然后通過第四層把模糊參數反模糊化,生成輸出層三個參數,分別為kp、ki、kd。圖6 是模糊神經網絡結構圖以及各層的關系式。
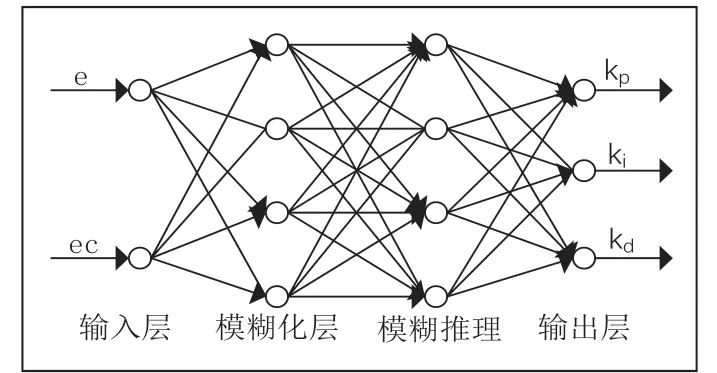
圖6 模糊神經網絡結構圖
第1 層為輸入層。
第2 層為模糊化層。
式中,i= 1,…,N,j= 1,2,3, …,M,cij和bij表示第i 個輸入變量第j個模糊集合隸屬度函數的中心和基寬[12]。
第3 層為模糊推理層。
式中,i1=1,2,…,M,i2=1,2,…,M,n=1,2,…,MN。
第4 層為輸出層。
其中,模糊推理層和輸出層直接用權矩陣w 鏈接,i= 1,2,3。
2.5 模糊神經網絡PID 學習算法
Fuzzy-RBF 神經網絡是利用自身的智能學習能力,重新規劃模糊控制器中的模糊規則,通過線性方式來改變連接權wij、隸屬度函數中心cij和基寬bij,該控制器的輸出為:
PID 算法為:
式中:e(k)為第k次采樣時刻的系統偏差。
自我學習的目標函數:
式中:w分別為該系統在kT時,刻的理想輸出與實際輸出,r(k) -y(k)則表示為迭代步驟k的控制誤差。
本文采用梯度下降法對參數進行計算,通過不斷搜索最小值,使系統中參數達到最優,結束迭代,然后輸出權重wij、隸屬度函數中心cij和基寬bij,具體算法為下式:
式中,α為迭代步驟;α為慣性系數,α∈[0,1];η為學習效率η∈[0,1]。
2.6 模糊神經網絡PID 學習步驟
(1)初始化系統中c、d、w、η、α。他們分別是隸屬度函數、基寬、權值、學習效率、慣性系數。
(2)根據系統傳遞過程計算,得出溫度差值e(k)以及溫度差變化量ec(k)。
(3)將各個參數傳遞給神經網絡,通過迭代計算出下一次系統輸出的溫度值y(k+)1 。
(4)重新從系統中獲取的參數c、b、w。
(5)令k=k+1 ,繼續采樣,然后返回步驟(1),再進行重新計算。
3 仿真分析
圖7 是Fuzzy-RBF 算法的模型,由于算法結構復雜,神經元數目數目眾多,難以用模塊來搭建其結構,因此采用S 函數來搭建算法,不僅實現了其功能,同時使操作行大大提高,為了檢驗Fuzzy-RBF 算法的性能,分別與普通PID算法、模糊PID 算法對比,通過Simulink 建立的物理模型。

圖7 Fuzzy-RBF 仿真結構圖
首先我們給系統期望值為40 度的初始值,通過三種不同算法檢驗系統到達期望值的時間、超調量、穩定時間,具體參數如圖8 所示。
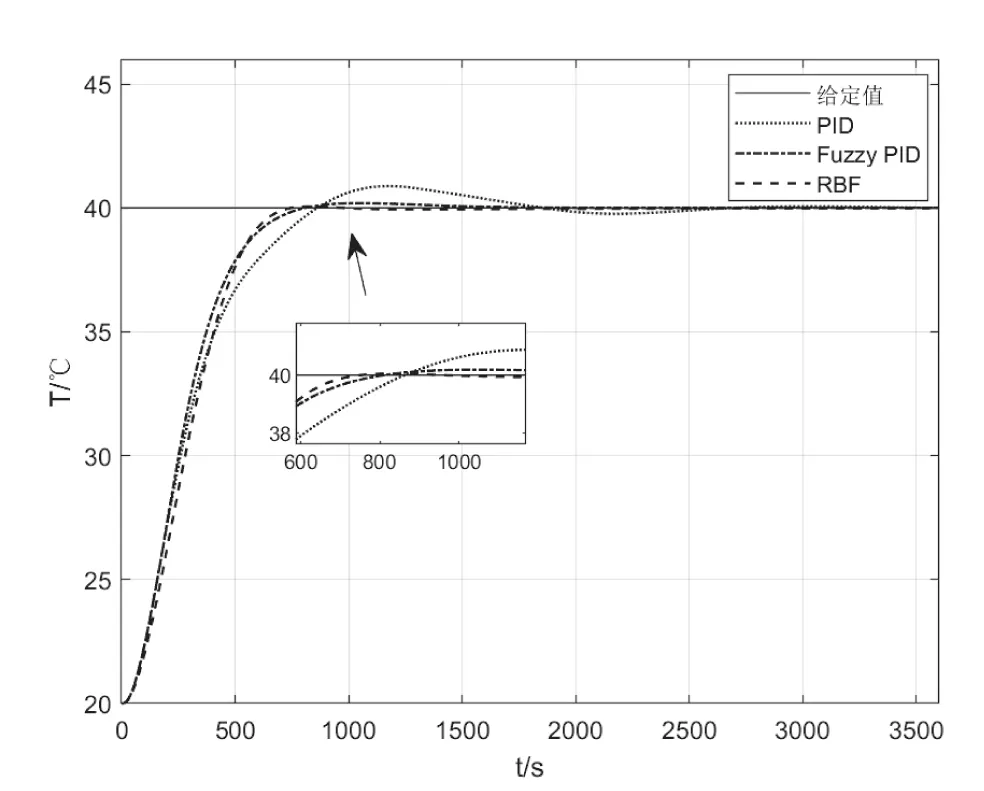
圖8 三種控制方式仿真結果比較圖
通過上面的圖8 和表1 我們可以看到,普通PID 的控制效果最差,達到上升時間為862s,并且該算法在系統中超調量達到了2.199%,最后達到期望穩定的溫度區間需要2335s,模糊PID 的上升時間、超調量、調節時間中的參數雖然優越于普通PID,但對于Fuzzy-RBF 還是有很多不足,Fuzzy-RBF 中的上升時間低于800s,超調量為0.128%,幾乎可以忽略,且調節時間遠遠小于另外兩種算法,通過上述分析,Fuzzy-RBF 神經網絡PID 控制算法在恒溫水浴鍋加熱系統有優越的性能,在控制過程中反應速度快、穩定性好、精度高。
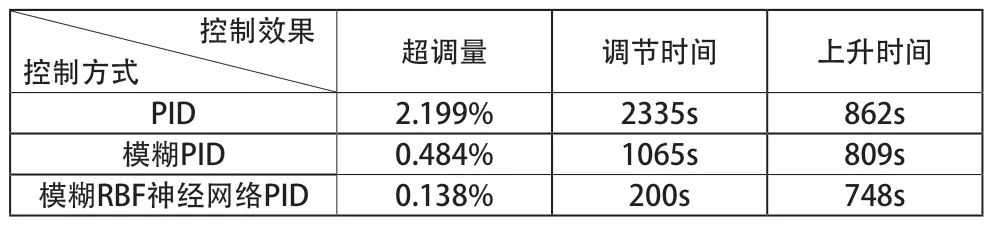
表1 三種控制方法比較數據統計表
圖9 和表2 為檢驗Fuzzy-RBF 神經網絡 PID 控制系統的跟隨效果,首先給水浴鍋物理系統輸入一個40°階躍,使其達到期望的溫度后且穩定后,在 t=2000s 時,再給階躍信號疊加一個溫度為5 的階躍信號,Fuzzy-RBF 神經網絡PID 控制系統是最快達到二次階躍的溫度,從穩態40°到期望的45°僅用了458s,其他兩種控制算法都超過500s,在超調量和調節時間指標下,控制效果都比其他兩種算法好很多,穩定性和波動性效果明顯,Fuzzy-RBF 神經網絡PID控制算法在跟隨階躍上具有良好的跟隨性能和魯棒性。
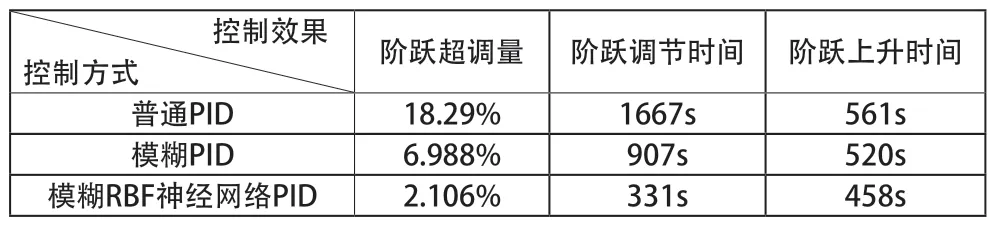
表2 改變輸入信號時三種控制方法比較數據統計表
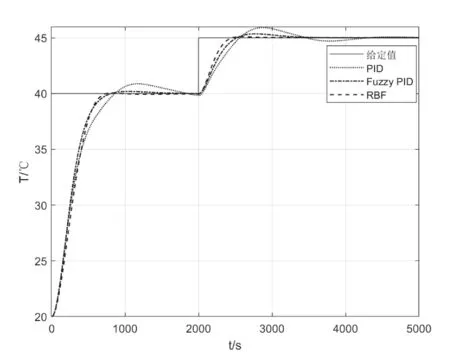
圖9 改變輸入信號時三種控制方式仿真結果比較圖
對于恒溫水浴鍋加熱控制系統,不僅要快速、精準到達期望溫度,還要有一定抗干擾能力,抵抗外界擾動對系統產生影響,本次改變了外界環境的溫度,控制系統溫度穩定后,在3000s 處升高外界的溫度,擾動效果如圖10 和表3 所示,通過比較不難發現,對于同樣的擾動,通過對比,Fuzzy-RBF 神經網絡 PID 控制系統能夠很好抑制外界溫度升高帶來的不穩定現象,同時該算法產生的超調量和調節時間優越于其他兩種。
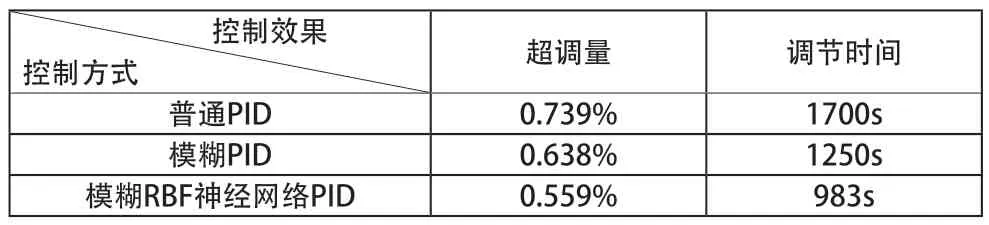
表3 加入擾動時三種控制方式對比圖
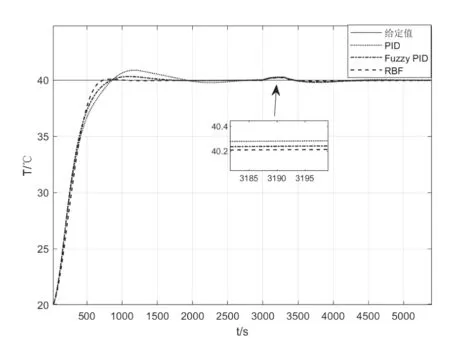
圖10 加入擾動時三種控制方式仿真結果比較圖
4 結論
針對恒溫水浴鍋在搭建數學模型不準確,函數擬合度低的情況,本文建立了基于物理模型的仿真,提出了一種基于Fuzzy-RBF 神經網絡PID 控制系統控制的恒溫水浴鍋加熱,通過Simukink 仿真驗證,在不同期望溫度值,能夠達到期望的效果,實現了對溫度的快速、精確、穩定的控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19