基于DSP+FPGA 的三相交流發(fā)電機(jī)功率因數(shù)確定方法
2023-05-29 05:50:58甘忠文薛開昶袁光偉顧興陽(yáng)
電子制作 2023年7期
關(guān)鍵詞:發(fā)電機(jī)
甘忠文,薛開昶,袁光偉,顧興陽(yáng)
(國(guó)家精密微特電機(jī)工程技術(shù)研究中心 貴州航天林泉電機(jī)有限公司,貴州貴陽(yáng),550081)
0 引言
功率因數(shù)是反映三相交流發(fā)電機(jī)運(yùn)行狀態(tài)最重要的指標(biāo)之一。功率因數(shù)過(guò)低時(shí),發(fā)電機(jī)的利用率過(guò)低,電機(jī)繞組銅損增大。對(duì)于直流發(fā)電機(jī),輸出電壓是由相電壓整流所得,功率因數(shù)過(guò)低時(shí)使輸出電壓質(zhì)量變差,使發(fā)電機(jī)輸出電壓變低[1~2]。當(dāng)發(fā)電機(jī)負(fù)載為非阻性負(fù)載時(shí),可通過(guò)功率因數(shù)值獲得電機(jī)實(shí)際有功功率。因此,發(fā)電機(jī)的功率因數(shù)是對(duì)發(fā)電機(jī)的運(yùn)行狀態(tài)進(jìn)行判斷的關(guān)鍵參數(shù)。
傳統(tǒng)的功率因數(shù)檢測(cè)方式,一種是檢測(cè)相電壓或相電流的上升沿或者下降沿得到周期,再通過(guò)檢測(cè)電壓與電流過(guò)零點(diǎn)時(shí)間差,將時(shí)間差轉(zhuǎn)換為功率因數(shù)角,從而獲得電機(jī)功率因數(shù)值[3~4],此方式在強(qiáng)干擾環(huán)境下,過(guò)零點(diǎn)檢測(cè)誤差較大,則功率因素精度較低;另外一種是通過(guò)發(fā)電機(jī)相電流與相電壓計(jì)算電機(jī)視在功率,通過(guò)負(fù)載端得到發(fā)電機(jī)有功功率,由視在功率與有功功率比值獲得功率因數(shù),此方法無(wú)法直接通過(guò)相電壓與相電流獲得[5~6],必須要通過(guò)負(fù)載獲得發(fā)電機(jī)有功功率,對(duì)于交流發(fā)電機(jī)系統(tǒng)難以獲得,對(duì)于直流發(fā)電機(jī)還需對(duì)直流輸出電壓與輸出電流采樣,需占用更多的硬件資源。同時(shí),對(duì)于DSP 來(lái)說(shuō)計(jì)算根號(hào)指令,占用資源多,運(yùn)行時(shí)間長(zhǎng);對(duì)于FPGA,無(wú)運(yùn)算根號(hào)的指令,需通過(guò)其他算法對(duì)根號(hào)運(yùn)算進(jìn)行間接運(yùn)算,步驟繁瑣,占用運(yùn)算資源多。
因此,本文在DSP 平臺(tái)上,提出來(lái)一種運(yùn)用近似計(jì)算的電機(jī)功率因素求解方法,在FPGA 平臺(tái)上提出一種基于鎖相環(huán)的電機(jī)功率因素求解方法,降低干擾對(duì)功率因數(shù)計(jì)算值的影響,僅需采樣兩路相電壓與相電流即可實(shí)現(xiàn),同時(shí)使DSP 與FPGA 在算法上更容易實(shí)現(xiàn),節(jié)約軟硬件資源。
1 電機(jī)功率因數(shù)確定原理分析
由于相電壓與相電流之間的相位差而產(chǎn)生無(wú)功功率,功率因數(shù)為有功功率與視在功率的比值,同時(shí)也為相電壓與相電流相位差余弦值。由于通過(guò)相電壓與相電流存在相位差,無(wú)法直接計(jì)算電機(jī)的有功功率,則無(wú)法直接計(jì)算功率因數(shù)。則通過(guò)間接方式獲得相電壓與相電流的相位差是確定功率因數(shù)的關(guān)鍵。通過(guò)對(duì)相電流與相電壓采樣,得到相電流ia、ib、ic與相電壓ua、ub、uc,但實(shí)際使用時(shí)僅需采樣其中A、B 兩相即可,通過(guò)式(1)、(2)對(duì)相電流的CLARK 變換的將三相電流轉(zhuǎn)換為靜止兩相電流得到αβ 軸上分量iα、iβ,同理可得相電壓在αβ 軸上分量uα、uβ。

圖1 靜止三相變換至兩相
不難發(fā)現(xiàn),通過(guò)坐標(biāo)變換獲得的功率因數(shù)角并不是通過(guò)過(guò)零點(diǎn)的檢測(cè)獲得,高頻干擾對(duì)其影響遠(yuǎn)小于過(guò)零點(diǎn)檢測(cè)方法,同時(shí)也并不需要獲得發(fā)電機(jī)輸出的有功功率,僅需兩相相電壓與兩相相電流即可獲得功率因數(shù)值。相電壓模AU如式(4)所示,相電壓AI模可通過(guò)同理獲得。
結(jié)合式(3)和式(4)可得功率因數(shù)cosφ如式(5)所示。
式中,|AU|、|AI|表示相電壓與相電流模。
2 DSP 實(shí)現(xiàn)方法分析
由于DSP 進(jìn)行根號(hào)運(yùn)算時(shí),需要占用過(guò)多時(shí)鐘周期,使用較多次數(shù)根號(hào)運(yùn)算時(shí),將使主程序的余量不夠或者用滿,帶來(lái)不可估計(jì)的風(fēng)險(xiǎn)。由式(4)與式(5)可知,在功率因數(shù)求取的運(yùn)算過(guò)程中,求模的運(yùn)算需要進(jìn)行根號(hào)運(yùn)算,則不利于使用DSP 實(shí)現(xiàn),因此為了規(guī)避根號(hào)運(yùn)算采用近似計(jì)算的方法。
結(jié)合式(5)可知,可知計(jì)算(cosφ)2時(shí),即可規(guī)避式(4)中的根號(hào)運(yùn)算,但要獲得功率因數(shù)仍需根號(hào)運(yùn)算。因此采用泰勒級(jí)數(shù)的方式進(jìn)行對(duì)(cosφ)2進(jìn)行化簡(jiǎn)求解。如式(6)所示,對(duì)于任意函數(shù)在點(diǎn)x=x0處具有任意階導(dǎo)數(shù),均可用泰勒級(jí)數(shù)展開。
式中f(n)(x)表示f(x)的n階導(dǎo)數(shù),n表示階數(shù)。則令x=(cosφ)2,取x0=1則將功率因數(shù)展開為泰勒級(jí)數(shù)如式(7)所示。
由于一般發(fā)電機(jī)功率因數(shù)均工作于接近于1 的狀態(tài),則當(dāng)電機(jī)功率接近于1 時(shí),高階項(xiàng)對(duì)整體的結(jié)果較小,為了更易于編程實(shí)現(xiàn),則在誤差允許范圍內(nèi)高階項(xiàng)則可省去,則式(7)可化簡(jiǎn)為如式8 所示。
例3.There has been a lot of publicity recently about all the Hong Kong English words that have made it into the latest edition of the Oxford English Dictionary(OED).The words include a number of Cantonese loanwords(e.g.char siu and dai pai dong)(China Daily,2016-06-07)(叉燒和大排檔)
通過(guò)取固定相移角度進(jìn)行計(jì)算,功率因數(shù)估算結(jié)果如表1 值。

表1 功率因數(shù)測(cè)試表
表中Err 為估算功率因數(shù)誤差。
通過(guò)計(jì)算可以看出,雖然近似計(jì)算實(shí)現(xiàn)方法算法簡(jiǎn)單,但隨著功率因數(shù)角增大,誤差將變大。當(dāng)功率因數(shù)角低于40°時(shí),誤差低于0.6%,此方式可用于電機(jī)工作與較高功率因數(shù)狀態(tài)下或僅用于電機(jī)故障判斷對(duì)精度要求不高使用條件下進(jìn)行檢測(cè),若需繼續(xù)提高精度只能通過(guò)增加階數(shù)的方法實(shí)現(xiàn)。
3 FPGA 實(shí)現(xiàn)方法分析
通過(guò)對(duì)DSP 近似計(jì)算方式的分析,雖然算法簡(jiǎn)單,但仍有缺點(diǎn),上述方法規(guī)避了開根號(hào)運(yùn)算,但仍需做除法運(yùn)算,且在功率因數(shù)較低時(shí),計(jì)算值誤差較大,應(yīng)用場(chǎng)合相對(duì)局限。為了增加功率因數(shù)估算的精度,同時(shí)避免提高近似計(jì)算階數(shù)使算法更為復(fù)雜并且近似計(jì)算存在無(wú)法避免的誤差,則針對(duì)FPGA 難以進(jìn)行除法及根號(hào)運(yùn)算的缺點(diǎn),提出運(yùn)用鎖相環(huán)的方式進(jìn)行功率因數(shù)估算。
3.1 FPGA 功率因數(shù)算法原理
通過(guò)圖1 所示,對(duì)于功率因數(shù)角φ正弦值可用相電壓與相電流的αβ 軸上分量表示,如式(9)所示。
同時(shí)結(jié)合式(5),可得以下關(guān)系式:
若定義?φ為估算功率因數(shù)角度,設(shè)式(10)等于X,設(shè)式(11)等于Y,可以得到估算功率因數(shù)角與實(shí)際功率因數(shù)角的關(guān)系如式12 所示。
結(jié)合式(12)不難發(fā)現(xiàn),當(dāng)估算功率因數(shù)角?φ接近于或等于實(shí)際功率因數(shù)角φ時(shí),式(12)結(jié)果為0,利用這一特點(diǎn),若采用鎖相環(huán)的方式實(shí)現(xiàn)使功率估算角度?φ與實(shí)際功率因數(shù)角φ進(jìn)入鎖定狀態(tài),此運(yùn)算過(guò)程,并不需要求出實(shí)際的相電壓與相電流模值,可采用固定比例系數(shù)的方式求取誤差。此方式規(guī)避了根號(hào)及除法運(yùn)算,此時(shí)功率因數(shù)估算角余弦值即為所求功率因數(shù)值。
3.2 鎖相環(huán)原理
鎖相環(huán)主要作用是實(shí)現(xiàn)估算角度與實(shí)際角度的跟蹤,最終達(dá)到對(duì)功率因數(shù)角鎖定的目的。如圖2 所示,鎖相環(huán)主要包含了鑒相器、環(huán)路濾波器、PI 調(diào)節(jié)器、累加器以及CORDIC。
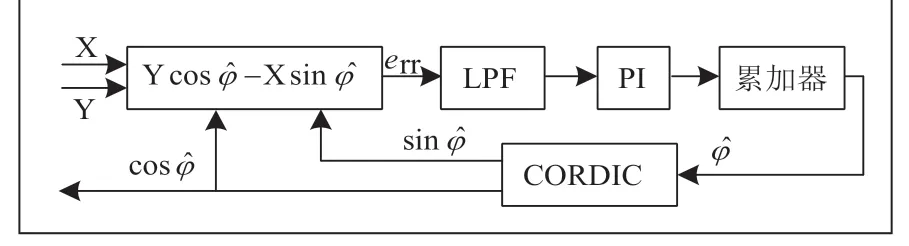
圖2 鎖相環(huán)原理圖
對(duì)于鑒相器,主要作用是求取輸入角度與估算角度的誤差值,此處采用式(12)的方法對(duì)誤差值進(jìn)行間接的求取,針對(duì)誤差需進(jìn)行歸一化處理,將誤差轉(zhuǎn)換到0~1 的范圍內(nèi),則可在PI 中加入歸一化系數(shù),即取|AU|×|AI|的最大值,假設(shè)在115V 三相交流電源、相電流峰值最大峰值為100A 的使用條件下,則|AU|×|AI|=16261,但實(shí)際應(yīng)用時(shí)為防止干擾的影響,歸一化系數(shù)可取20000。
對(duì)于低通濾波器,主要用于對(duì)誤差信號(hào)進(jìn)行濾波,避免高頻干擾信號(hào)對(duì)精度的影響,導(dǎo)致估算角度值產(chǎn)生誤差。由于誤差信號(hào)頻率,接近于為直流信號(hào),則可采用低通濾波器的方式進(jìn)行濾波,截止頻率可選擇200Hz 的頻率,即ωo=1256rad/s 為了保證更好的濾波效果,采用二階低通濾波器,傳遞函數(shù)如式(13)所示。
式中,An表示低通濾波器增益系數(shù),Q表示表示低通濾波器品質(zhì)因數(shù),本應(yīng)用中可取An=1,Q=1。
對(duì)于PI 調(diào)節(jié)器及累加器,主要用于對(duì)誤差信號(hào)進(jìn)行處理,將誤差信號(hào)轉(zhuǎn)換為對(duì)應(yīng)的角度誤差信號(hào),結(jié)合累加器對(duì)PI 調(diào)節(jié)的誤差信號(hào)進(jìn)行積分,通過(guò)PI 調(diào)節(jié)使PI 調(diào)節(jié)器輸出角度不斷逼近于輸入角度。其傳遞函數(shù)如式(14)所示,同時(shí)由于程序計(jì)算造成的延時(shí)如式(15)所示。
式中,Kp表示比例系數(shù),Ki表示比例系數(shù),Ts表示PI調(diào)節(jié)器運(yùn)算周期。結(jié)合低通濾波器與PI 調(diào)節(jié)器等傳遞函數(shù),得到鎖環(huán)環(huán)開環(huán)波特圖如圖3 所示。
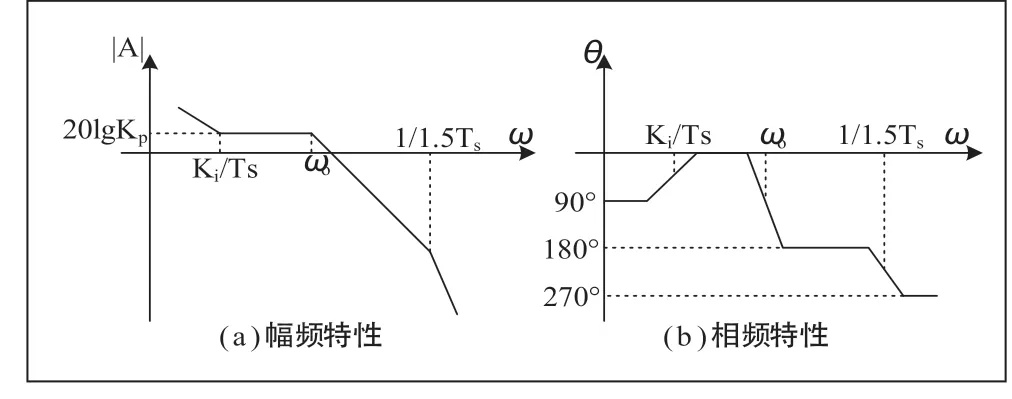
圖3 鎖相環(huán)波特圖
圖3 中ωo為低通濾波器截止頻率。為防止鎖相環(huán)振蕩,功率因數(shù)估算響應(yīng)不理想,在低通濾波器截止頻率ωo=1256rad/s 條件下,此處可取PI 傳遞函數(shù)的零點(diǎn)為Ki/Ts=600rad/s,由于一般電機(jī)控制器控制頻率為10~20kHz,則設(shè)鎖相環(huán)調(diào)節(jié)頻率為18 kHz,則有Ts=0.55×10-4s,則積分系數(shù)Ki=0.033,由于發(fā)電機(jī)功率因數(shù)僅用于電機(jī)運(yùn)行狀態(tài)及故障判斷,不直接影響發(fā)電機(jī)控制,則估算速度并不需要太快,則可取Kp=2×Ki=0.066,實(shí)際應(yīng)用的PI 參數(shù)需根據(jù)調(diào)試結(jié)果進(jìn)行微調(diào)。
3.3 CORDIC 算法原理
對(duì)于CORDIC 主要求取估算功率因數(shù)角正余弦值,用于鑒相器進(jìn)行誤差求取并同時(shí)獲得發(fā)電機(jī)功率因數(shù)值。
CORDIC 算法采用迭代的方式,通過(guò)系列的基本角度進(jìn)行多次的旋轉(zhuǎn),在確定基本角度的正切值的情況下,使所測(cè)角度由基本角組成,對(duì)應(yīng)正余弦值將不斷逼近所測(cè)角度實(shí)際的正余弦值。如圖4 所示,以(1,0)為基準(zhǔn)點(diǎn)進(jìn)行旋轉(zhuǎn),迭代次數(shù)越多,角度越逼近真實(shí)值,實(shí)際應(yīng)用時(shí),若迭代次數(shù)采用11 次,理論角度誤差為0.056°,功率因數(shù)誤差為4.8×10-7,滿足使用要求。通過(guò)迭代后獲得最新坐標(biāo)(x,y),其中x即為實(shí)測(cè)角度θ余弦值,y為所測(cè)角度θ正弦值。
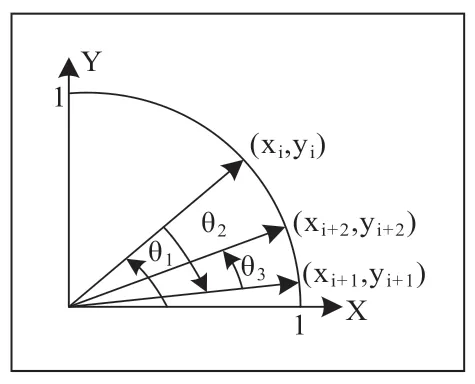
圖4 CORDIC 原理
通過(guò)查表獲得基本角度的正切值,得到每次旋轉(zhuǎn)后最新的點(diǎn)坐標(biāo),如式(16)所示。
式中,An表示由于CORDIC 變換的引入的增益,θi表示每次旋轉(zhuǎn)的角度。
4 算法仿真
通過(guò)Simulink 對(duì)鎖相環(huán)實(shí)現(xiàn)方式進(jìn)行仿真,由于近似計(jì)算方式測(cè)試誤差基本可以通過(guò)計(jì)算得出則不再仿真驗(yàn)證。仿真條件為三相電壓與三相電流采用頻率500Hz,相電壓有效值為115V,相電流峰值100A。如圖5 是鎖相環(huán)實(shí)現(xiàn)仿真框圖,通過(guò)改變不同的電壓與電流的相位對(duì)程序進(jìn)行驗(yàn)證,并且通過(guò)在電壓與電流信號(hào)注入干擾,檢驗(yàn)算法的精度。
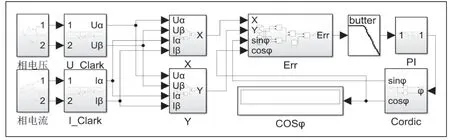
圖5 鎖相環(huán)實(shí)現(xiàn)仿真圖
當(dāng)相電壓與相電流為標(biāo)準(zhǔn)正弦信號(hào)時(shí),通過(guò)改變不同的電壓與電流的相位對(duì)測(cè)試精度進(jìn)行驗(yàn)證測(cè)試,功率因數(shù)估算結(jié)果如表2 所示,功率因數(shù)估算值幾乎不存在誤差,與理論值基本一致。其中當(dāng)φ=50°時(shí),功率因數(shù)估算波形如圖6所示,誤差響應(yīng)曲線比較理想,符合測(cè)試使用要求。

表2 功率因數(shù)測(cè)試表

圖6 φ=50°功率因數(shù)波形
通過(guò)在相電壓與相電流中加入高頻干擾進(jìn)行測(cè)試,相電壓與相電壓波形如圖7 所示,通過(guò)改變不同的電壓與電流的相位對(duì)測(cè)試精度進(jìn)行驗(yàn)證,測(cè)試結(jié)果如表3 所示,測(cè)試平均誤差為0.06%,精度仍相對(duì)較高,符合正常使用要求。

表3 功率因數(shù)測(cè)試表
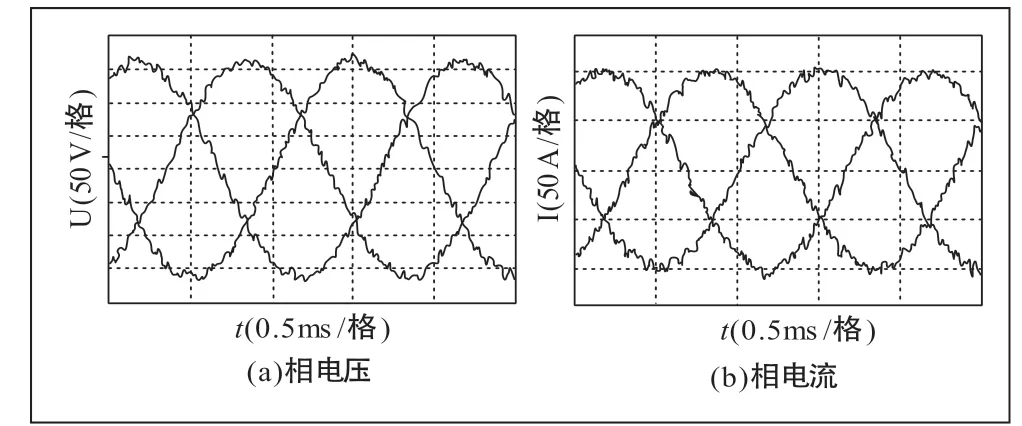
圖7 相電壓與相電流
5 結(jié)論
(1)給出了相電壓與相電流坐標(biāo)變換的功率因數(shù)原理分析方法,通過(guò)坐標(biāo)變換獲得的功率因數(shù)角規(guī)避高頻干擾對(duì)其的影響,遠(yuǎn)小于過(guò)零點(diǎn)檢測(cè)方法。同時(shí)僅需兩相相電壓與兩相相電流即可獲得功率因數(shù)值。
(2)給出了基于DSP+FPGA 的功率因數(shù)確定原理,近似計(jì)算的方法規(guī)避了DSP 難以實(shí)現(xiàn)根號(hào)運(yùn)算的缺點(diǎn);基于鎖相環(huán)的功率因數(shù)確定方法規(guī)避了FPGA 無(wú)除法器的缺點(diǎn),僅采用加減乘等簡(jiǎn)單的運(yùn)算方式實(shí)現(xiàn)。
(3)通過(guò)實(shí)測(cè)表明,DSP 功率因數(shù)確定方法,當(dāng)功率因數(shù)越大時(shí),估計(jì)功率因數(shù)誤差越小,僅可功率因數(shù)較大或故障判斷時(shí)進(jìn)行使用。FPGA 功率因數(shù)確定方法,在標(biāo)準(zhǔn)正弦的測(cè)試條件下,功率因數(shù)在全范圍內(nèi)平均誤差基本不存在。在強(qiáng)干擾環(huán)境下,功率因數(shù)估算誤差為0.06%,均符合使用要求。
猜你喜歡
故事作文·高年級(jí)(2021年12期)2021-12-21 02:32:35
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
廣西電力(2016年6期)2016-07-10 12:03:37
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
智能建筑電氣技術(shù)(2015年5期)2015-12-10 05:52:30
電測(cè)與儀表(2015年13期)2015-04-09 11:57:12
電測(cè)與儀表(2015年2期)2015-04-09 11:29:14
水電站機(jī)電技術(shù)(2014年6期)2014-09-26 12:07:48
水電站機(jī)電技術(shù)(2014年1期)2014-09-26 11:59:45