一種星間測距與時間同步的地面驗證方法
2023-05-31 07:59:32周莉王竹剛董文濤閻敬業
航天器工程 2023年2期
周莉 王竹剛 董文濤 閻敬業
(中國科學院國家空間科學中心,復雜航天系統電子信息技術重點實驗室,北京 100190)
星間通信測距和時間同步技術是衛星編隊飛行進行聯合探測的關鍵技術,但由于地面很難模擬衛星在軌實際工況,比如幾千米到幾百千米的遠距離、在軌溫度變化、星間相對速度等條件,以及地面多徑效應、試驗復雜、難實施等因素影響。因此,星間通信測距時間同步技術的地面驗證試驗的研究具有重要意義。
由于地面驗證存在選址困難、操作復雜、無線通信易受多徑干擾等缺點,大部分星間通信測距時間同步的測試基于桌面有線。文獻[1]提出用光纖模擬通信長距離,但光纖的傳輸時延受到溫度和光纖鏈路上分布應力等因素的影響而波動,需要專門設計一套復雜的基于光纖的測距驗證系統,并對溫度等因素對信號延時的影響進行閉環反饋,適用于對驗證系統測距精度要求高。但僅僅桌面有線試驗無法驗證星間通信測距的動態性能。文獻[2]提出了光纖結合電控平移臺的方案進行桌面無線試驗,這種方法動態移動范圍很有限,只有50cm左右,并且在移動初始時,對測距帶來劇烈的振蕩,影響測距精度。
本文基于龍江衛星雙星編隊任務和空間科學先導衛星二期背景型號預研“超長波天文觀測陣列”的研究背景[3-4],超長波任務利用“1主9從”10顆衛星的繞月線性編隊形成空間分布式干涉陣列,在月球背面開展空間低頻射電天文探測[5]。編隊衛星需要進行實時的星間基線測量和多星探測(采樣)時鐘同步,編隊衛星采用線性編隊,星間距離為1~100km,衛星相對運動速度>5cm/s,測距誤差要求為100km距離時誤差為1m,時間同步精度3.3ns。
星間通信測距時間同步是整個干涉測量任務的關鍵技術,需要在地面進行充分驗證;由于任務的測距精度不高(1m),所以對地面驗證系統的測距精度也可以放寬到厘米級。本文首先對星間測距時間同步的原理進行介紹,然后對地面驗證試驗的方法和原理進行分析,最后通過地面試驗結果說明驗證方法的可行性和有效性。
1 星間通信測距時間同步原理
由于全球導航衛星系統(GNSS)信號[6-7]無法覆蓋高軌、月球軌道或深空軌道,因而星間通信測距時間同步采用雙向單程偽距測量體制(DOWR)[8-9],進行雙向測距。
星間時鐘同步原理是采用時鐘馴服原理[9-10],以主星的時鐘為基準,將子星的時鐘向主星的時鐘對齊。時鐘馴服算法的硬件構架如圖1所示,主星和子星上配置壓控恒溫晶體振蕩器(VCOCXO)、高精度的數模轉換器(DAC)、以及由CPU和FPGA組成的解算控制單元,通過上述DOWR測得兩星之間真實的的時差,經過二階鎖相環濾波器,采用比例、積分和微分(PID)算法閉環控制高分辨率DAC(20bit),得到控制電壓,實時輸出到電壓可控的恒溫晶振,使得該VCOCXO產生和參考源同頻、同相(即時間同步)的被馴服時鐘。
圖1 時鐘馴服系統構架Fig.1 Architecture of clock taming system
時鐘馴服可以讓被馴服后時鐘短期穩定度良好的同時,將長期頻率穩定度校準到參考源。由于質量功耗成本的限制,本文方法的主星和子星均采用的VCOCXO是80MHz,短期頻率穩定度≤10-12/s,長期頻率穩定度≤10-7/s,馴服誤差<3.3ns[8]。
2 地面驗證方法
通過對有線和無線的地面驗證方法的調研和試驗,本文提出了一套系統的星間通信測距時間同步地面驗證方法,包括桌面有線測試、高低溫箱有線測試、微波暗室無線測試、車載無線測試4個基礎試驗,建議按順序進行,先進行有線靜態測試滿足技術指標要求后,再進行外場的動態測試,因為動態測試試驗環境和操作復雜,試驗不成功的影響因素多,比如天線對準或者多徑效應、設備電纜松動等。
桌面有線測試利用信道模擬器和可調衰減器,模擬不同距離和信噪比的工況,測試設備引入的誤差可采用矢網進行標定,該工況下的誤差引入最小,但無法測試設備的動態響應特性。高低溫箱測試模擬在軌不同環境溫度的工況,方法與桌面有線類似,高低溫箱是特別重要的部分,首先進行溫度標定,再在全溫范圍內測試測距和時間同步的性能。微波暗室無線測試采用掃描架運動模擬在軌動態工況,一般微波暗室天線掃描架的控制精度很高,可達毫米級,并能夠同時測試通信測距和時間同步的動態性能。由于微波暗室掃描架運動只有幾米的長度和每秒幾十厘米的速度,增加車載無線測試模擬星間高相對運動速度的工況,車載速度可達100km/h(約28m/s)以上,平均加速度可達7m/s2,車載試驗主要目的是測試星間通信測距的動態響應性能,外場動態測距誤差引入比較難控制。以上方法適用于主從式的組網方式,支持多址復用,通過地面試驗同時實現一顆主星與多顆子星之間的通信測距和時間同步的功能驗證[11],其中子星之間沒有通信鏈路(見圖2)。
下文將依次對地面測試方法進行介紹。
綜上,筆者析得國內正念療法研究主題相對集中,圍繞正念訓練、正念、心理健康、正念干預等核心關鍵詞,形成了以軀體疾病、禪修、MBSR、社會生活問題等重點關鍵詞為代表的熱點主題,在這些熱點主題四周又銜接諸多研究議題。

圖2 星間通信測距時間同步地面驗證方案Fig.2 Ground verification scheme for inter-satellite communication, ranging and clock synchronization
2.1 有線測試
星間設備在完成桌面有線調試,并且進行了零值標定、信噪比補償和溫度補償后,再進行基于信道模擬器的桌面有線測試,如圖3所示。桌面有線測試方案采用信道模擬器設置星間距離,采用可調衰減器設置信道衰減,以及通用頻率計數器計算并實時存儲主星與各子星之間的時間同步誤差;通過測距值與信道模擬器設置的測距值比較,計算誤差。
桌面有線測試方法可以分為加入信道模擬器和不加入信道模擬器。不加入信道模擬器可以同時測試通信測距和時間同步,用標定好的被測電纜代替信道模擬器;加入信道模擬器后會對時間同步參數產生偏移,只能測試通信和測距。從試驗的復雜度和成本考慮,一般信道模擬器加在前向或者反向鏈路一條鏈路上即可,這時需要把系統中的雙工器去掉。另外,由于用戶的實際應用一般工作在射頻(L,S,Ku,Ka等頻段),所以還需要配置上下變頻模塊來匹配信道模擬器工作的頻段。系統中增加的上下變頻器、信道模擬器、可調衰減器會對測距和時間同步的零值產生影響,但不會影響相對測距,可以進行多次不同距離的測量,計算距離變化的差值。
桌面有線測試方法采用的計數器為通用頻率計數器53230A,時間分辨率為20ps,具有數據記錄和存儲功能,以主星的秒脈沖(PPS)為基準,計算子星輸出的同步PPS與主星PPS之差,就是同步時差。頻率計數器53230A為雙通道輸入,若進行多星的測量,需要多臺53230A。
圖3 桌面有線測試方案Fig.3 Desktop wired test scenario
桌面有線測試采用的信道模擬器可以根據用戶的頻段,選用合適的通用信道模擬器,能夠有效模擬各種信號惡化(多普勒、時延、衰落、相移等),如DBM公司信道模擬器的信號的時延參數可以精確到0.1ns(距離約為0.03m)步進,當工作在動態模式時,時延的變化率范圍從0.5ps/s到20ms/s。
桌面有線測試方案系統本身引入的測量誤差來自信道模擬器和通用計數器的誤差(精度),信道模擬器的測距誤差為3cm,時間同步測試的誤差可以到20ps,適用于星間測距精度要求為厘米級的任務。
在無線電測量系統中,影響測距精度的主要因素有晶振頻率穩定度、溫度、信號信噪比等因素。溫度對測距變化的影響可以通過溫度標定的方法消除,一般設備在軌工作溫度為-40℃~+50℃,需要注意恒溫晶振的工作溫度范圍,高溫下恒溫晶振的性能惡化嚴重,會導致系統失常。溫箱的工作溫度可以設置10℃的步進工作溫度。主星和子星的設備需要分別進行標定。高低溫箱有線測試與桌面有線測試連接類似。標定的方法是首先對待測設備在不同溫度下的測距和時間同步值進行記錄,通過DOWR解算公式演算出測距和時間同步的補償值;然后對溫度補償后設備在10℃的步進工作溫度下進行測試驗證。高低溫箱測試是對在軌溫度工況的模擬,是地面驗證重要的部分。
2.2 微波暗室無線測試
根據前期動態摸底實驗,地面多徑效應對無線通信測距影響很大,造成鏈路不穩定、測距波動大的問題,需要對無線測試時的波束進行約束。
微波暗室特殊的環境還可以減少地面多徑效應對通信測距的影響,同時微波暗室室內的條件能夠支持使用測試儀器,可以動態測試測距和時間同步的性能。在微波暗室無線測試和車載無線測試中,主星和子星無線通信均需采用定向喇叭天線,天線波束寬度建議10°~20°,天線具有一定增益。
微波暗室無線測試方法是利用暗室內掃描架的上下運動模擬星間的相對運動,測試場景如圖4所示。主星和子星設備通過射頻電纜連接各自天線,將主星的天線固定在地面,子星天線固定在掃描架活動部件的支架上,通過掃描架的上下運動模擬星間的相對運動,測距值與掃描架的移動值比較,確定測距誤差。微波暗室掃描架的活動范圍為4m,距離設置誤差為毫米量級,掃描速度最大為0.38m/s。
微波暗室無線測試方法可以實現一主多從的通信測距和時間同步動態測試,用多個頻率計數器對一主多從的秒脈沖之間的偏差進行記錄。本方案系統引入的誤差很小,測距誤差為掃描架的移動位置誤差1mm,時間同步誤差為頻率計測量誤差20ps。
圖4 微波暗室無線測試方案Fig.4 Microwave anechoic chamber wireless test scenario
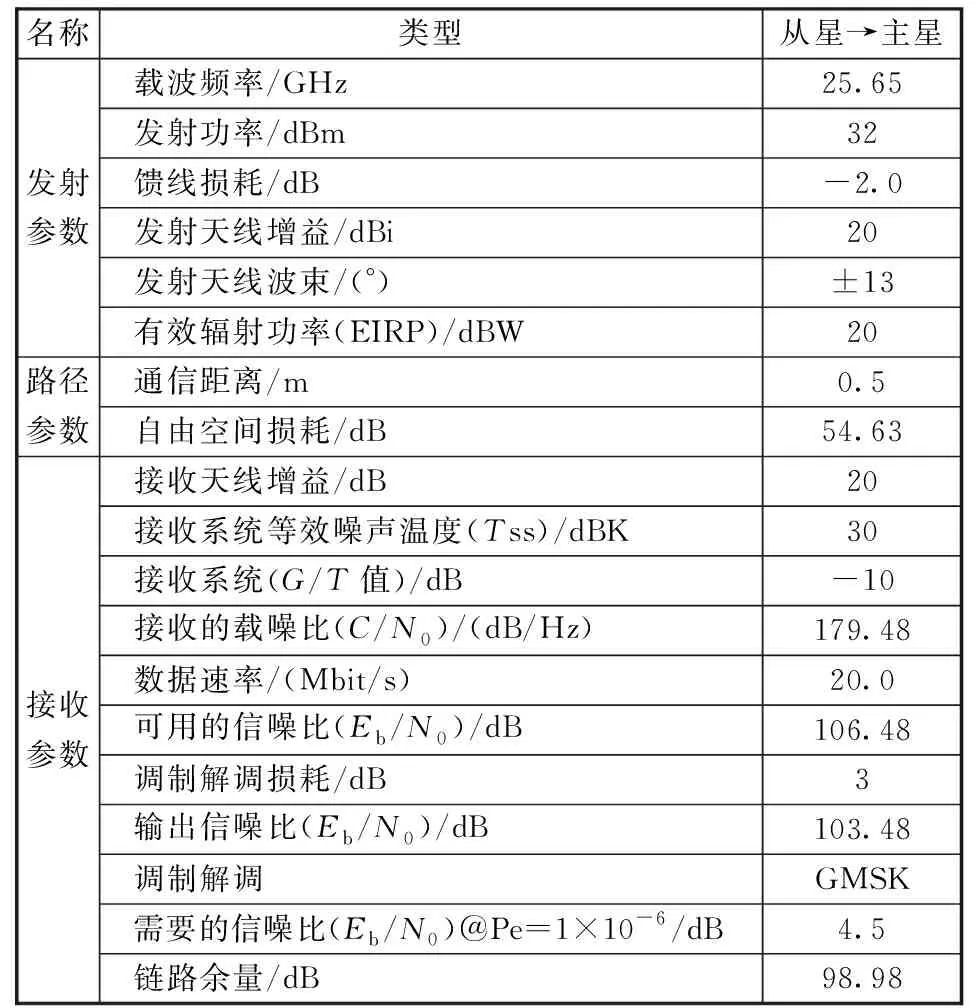
表1 微波暗室無線鏈路計算Table 1 Wireless link calculation in one Microwave anechoic chamber
2.3 車載無線測試
車載無線測試方法是地面最易實現的動態測試場景,并且具有不受設備質量限制、加速度快的優點。為消除地面多徑影響,將主星設備置于高樓頂部,子星設備放置在汽車上,測試場景如圖5所示,主星天線和子星天線通過設置三腳架角度粗對準。車載無線測試方法采用GNSS接收機的測距值作為測距依據,GNSS接收機的測距誤差為厘米量級,能夠滿足厘米級測距精度的要求。主星和子星設備也可以互換位置。
車載無線測試測距的模型如圖5所示,需要用GNSS接收機測試樓頂P0、起始位置P1、結束位置P2點的位置信息,推算出測距的起始距離S1和結束距離S2,星間測距測的是模型中的斜邊。
車載無線測試方法,能驗證星間相對運動100km/h以上,相對加速度7m/s2(某些汽車4s內可加速到100km/h)對星間通信測距的影響,可以反復多次測試不同速率下的車前進和后退工況下的通信和測距功能。
車載試驗方案測試誤差為GNSS接收機定位誤差,采用的是Spectra Geosptial公司的SP80接收機,設備保證的定位誤差為5cm。
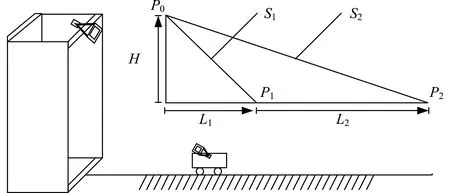
注:H為樓頂待測設備的安裝天線到開始位置車載待測設備安裝天線之間的垂直高度;L1為樓頂待測設備的安裝天線到開始位置車載待測設備安裝天線之間的水平距離;L2為汽車運動的距離。圖5 車載無線測試場景Fig.5 Vehicle wireless test scenario
3 地面試驗結果
本文提出的地面驗證方案各種工況下多星星間測距和時間同步的驗證結果如下。
3.1 桌面有線測試結果
通過信道模擬器設置通信延時來模擬星間距離如圖6橫坐標所示,信道模擬器最長距離設置為約30km。圖6中縱坐標為測距誤差,子星1和子星2的測距誤差均很小,30km時最大測距誤差為0.12m,可以驗證通信測距算法的正確性。圖6測試結果只有正誤差,這是由于零值校準的零值設置偏大導致的,初始值設在了零以上。
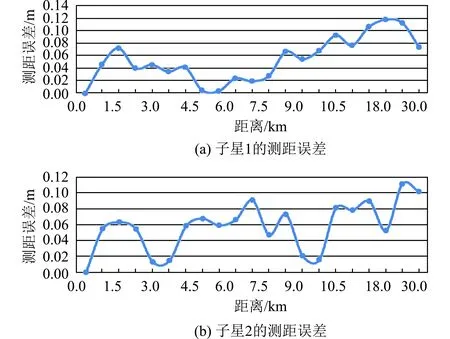
圖6 桌面有線測試中不同距離下的測距誤差Fig.6 Ranging error at different distances in the desktop wired test
3.2 微波暗室無線測試結果
在微波暗室無線測試時,設置掃描架上下運動2.5m,記錄測距數據如圖7所示,子星1和子星2的測距誤差計算見表2,子星1誤差為0.12m,子星2測距誤差為0.01m。圖7中子星1和子星2的初值不一樣,這是因為零值標定的問題,這里看的是運動變化的距離。
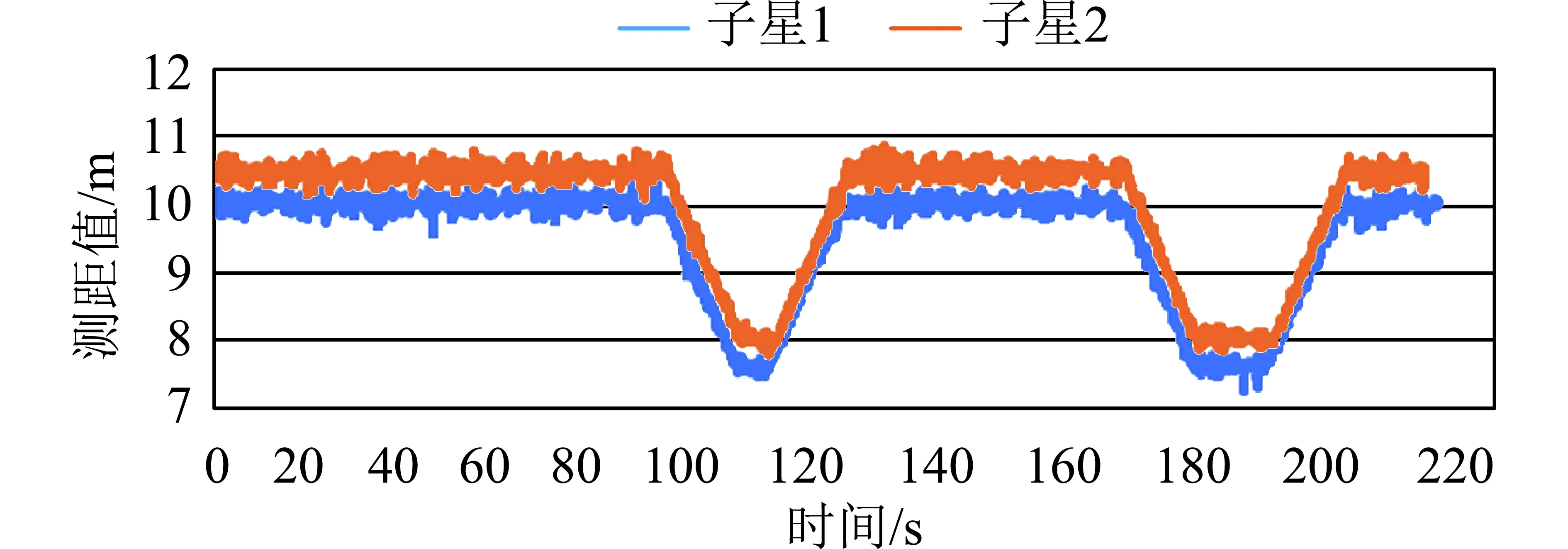
圖7 微波暗室動態測試中測距結果Fig.7 Ranging result in the microwave anechoic chamber wireless dynamic test
微波暗室測距誤差計算結果見表2。
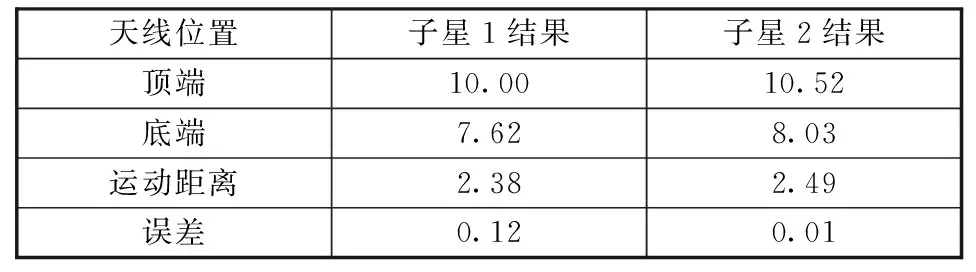
表2 微波暗室無線測距誤差計算Table 2 Ranging error calculation for the microwave anechoic chamber wireless test m
微波暗室動態測試時,同時使用頻率計記錄主星與2顆子星的時間同步誤差。將主星PPS分成兩路給兩臺頻率計,記錄主星PPS與2顆子星PPS之間的誤差。時間同步測試數據如圖8所示。子星1和子星2的測距波動均小于1.5ns。
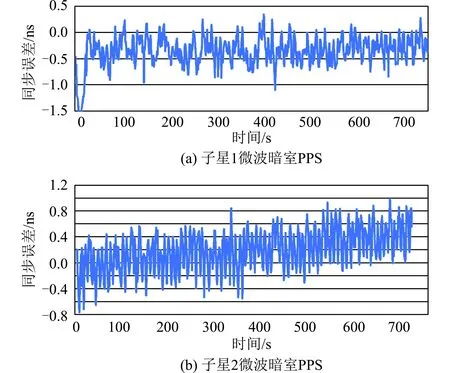
圖8 微波暗室動態無線測試中時間同步結果Fig.8 Clock synchronization result in the microwave anechoic chamber wireless dynamic test
3.3 車載無線測試結果
車載無線測試中,主星單機放置在樓頂,子星1和子星2單機放置車頂,2顆子星天線并排放置,朝向主星天線。首先進行靜態測試,再進行動態測試。因為動態測試時,啟動和停止的位置難以控制準確,因此測距誤差在靜態時進行,動態測試用于粗測距。
靜態測試結果如圖9所示,主星與兩子星之間的距離用GPS測得是51.90m,子星1測得結果是51.90m,子星2測得結果是51.96m,可以算出靜態測距誤差<0.10m,無線靜態測距波動<0.30m。
車子以不同的運動速度往返運動,實時測距如圖10所示,子星1和子星2星間測距穩定,測距誤差小于1m,測試的瞬時相對加速度最高為10m/s2,驗證了星間鏈路的動態響應性能。

圖9 車載無線靜態測試中測距結果Fig.9 Ranging result in the vehicle wireless static test
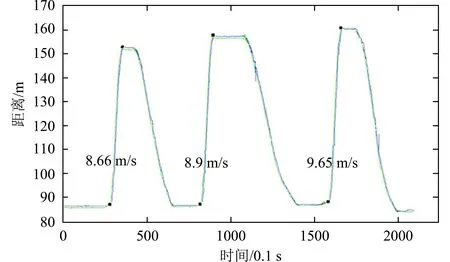
圖10 車載無線測試中不同加速度下的測距結果Fig.10 Ranging results at different acceleration rate in the vehicle wireless test
4 結束語
針對星間通信測距時間同步地面驗證困難的問題,本文結合實際項目經驗,提出一套系統、簡單易行的地面驗證方案,利用信道模擬器、GNSS接收機、通用頻率計、微波暗室掃描架等成熟的地面測量工具,設計了桌面有線、微波暗室無線、車載無線3個基礎試驗,并通過試驗結果驗證了設計方案的可行性和有效性,并且在龍江一號、二號衛星任務的地面試驗中得到應用。后續可以為多星星間通信測距時間同步研究提供有效地面測試方法。