基于時空圖網絡的高速公路交通流預測方法
2023-06-04 04:22:33崔書恒劉雅妮陳芳
物流科技 2023年4期
關鍵詞:高速公路
崔書恒 劉雅妮 陳芳


摘 要:高速公路的路況問題日益,這使得人們越來越重視對高速公路交通運行狀態的評估與預測。高速公路不同于普通公路,是一段全封閉的道路,車流量大和行車速度快是其最大的特點。因此,如何利用交通大數據來挖掘分析交通流的特征,并通過智能化的手段科學合理地預測出未來時間交通流的變化情況已經成為智能交通領域的一個研究熱點。文章正是在智能交通領域下,深入研究基于時空圖網絡的高速公路路網交通流預測方法,對空間依賴性和時間依賴性分別進行建模,建立了一個長短時交通流預測模型去評估高速路況,并取得了很好的效果。
關鍵詞:高速公路;交通流預測;時空圖網絡
中圖分類號:F25;U491文獻標志碼:ADOI:10.13714/j.cnki.1002-3100.2023.04.026
Abstract: The increasingly serious situation of expressway traffic conditions makes people pay more and more attention to the evaluation and prediction of expressway traffic operation status. The expressway is different from the ordinary road section. It is a totally closed road. Its biggest characteristics are large traffic flow and fast speed. Therefore, how to use traffic big data to mine and analyze the characteristics of traffic flow and scientifically and reasonably predict the changes of traffic flow in the future through intelligent means has become a research hotspot in the field of intelligent transportation. In the field of intelligent transportation, the paper deeply studies the traffic flow prediction method of expressway network based on spatio-temporal graph network, models the spatial dependence and temporal dependence respectively, and establishes a long-term and short-term traffic flow prediction model to evaluate the expressway traffic conditions, and has achieved good results.
Key words: highway; traffic flow prediction; spatio-temporal graph network
隨著車流量的增加,高速公路出現了交通擁擠、交通安全性能降低等的新問題。交通流預測是實現合理交通分配和持續發展的基礎,是實現智能交通的必要條件。短期交通流預測使用歷史交通數據、當前交通數據及其他影響交通運行的因素對其進行挖掘分析,構建預測模型以預測未來一段時間內的交通運行狀態。交通流預測分為長期預測和短時預測,一般短時預測的時間尺度為5分鐘至30分鐘,長期預測則超過30分鐘。
現有的交通流預測方法缺乏將時間、空間兩個維度進行同步分析的研究,為此,文章構建了一種基于時空圖網絡(S-TGN,Spatio-Temporal Graph Network)的高速公路路網交通流預測模型,將路段的門架監測數據輸入圖卷積網絡(GCN)和門控遞歸單元(GRU)相結合的高速公路交通流的預測模型中以進行高速公路路網的預測。模型可以處理復雜的空間依賴關系和時間依賴關系。
1? ? 文獻綜述
當前,高速公路交通流預測越來越受到學者們的重視。徐建閩等從出行發生量預測、OD交通量預測和交通量分配三方面進行研究,運用一元線性回歸模型、重力模型法和靜態多路徑分配模型等完成了對廣州珠光高速未來25年內的交通量預測[1]。撒元功等應用誤差反傳神經網絡(Back Propagation,BP)建立了高速公路交通流模型,通過特征性訓練和適應性訓練,得到了較為準確的高速公路交通流神經網絡模型[2]。曲仕茹等在利用BP神經網絡進行高速公路交通流預測的基礎上,不斷對模型進行優化,通過修改神經網絡中的參數,提高預測的精準性[3-5]。劉清林等在對以往BP神經網絡研究的基礎上,利用小波濾波器對數據進行白噪聲的消除,進而利用閉環反饋BP神經網絡對高速公路節假日擁堵情況進行預測[6]。肖智等在考慮到高速公路交通流多種影響因素的條件下,提出利用POS方法進行參數優化的支持向量回歸(SVR),從而進行多因素單目標的高速公路交通流預測[7]。焦琴琴建立了DBN-SVR短時交通流預測模型,利用美國高速公路數據進行實證驗證,結果表明在預測精度方面優于單一的SVR預測模型[8]。
2? ? 模型方法
將高速公路的道路拓撲結構抽象成圖結構,給定初始化未加權的圖結構G(V,E),其中V為圖的節點集合,E為邊的集合。將數據預處理得到的鄰接矩陣A∈RN*N用于表示高速公路之間的連接,其中N表示路網中的節點數,鄰接矩陣只包含0和1的元素,元素1表示兩條道路相連,元素0表示不相連。
再將X∈RN*P用于表示特征矩陣,將高速路網上的交通流視為網絡中節點的屬性特征,其中P表示每個節點的特征數。節點屬性特征可以是任何交通流數據,例如速度、流量和交通密度,在這里采用速度數據。
預測問題的目標就是用前S個時間步的交通流來預測未來T個時間步的交通流。給定圖G及其歷史步長S的圖信號,通過學習函數f來預測下一T時間步的圖信號,可以利用下式進行分析。
獲取復雜的空間相關性是交通預測的關鍵問題,卷積神經網絡(CNN)可以獲得局部空間特征,但它只能用于歐幾里德空間。高速公路的道路網絡不是二維網格,這意味著CNN模型不能反映路網的復雜拓撲結構,因此,考慮采用可處理任意圖結構數據的圖卷積網絡(GCN)來準確捕捉空間依賴性。
對于一個圖G=(V,E),輸入X是一個N*D的矩陣,表示每個節點的特征,同時有圖的鄰接矩陣A,我們希望得到一個N*F的特征矩陣Z,代表學得的每個節點的特征表示,其中F是希望得到的表示的維度。
給定鄰接矩陣A和特征矩陣X,GCN模型在傅里葉域中構造濾波器。過濾器作用于圖的節點,通過其一階鄰域捕獲節點之間的空間特征,然后通過疊加多個卷積層來建立GCN模型,其可表示為:
其中A=A+IN表示鄰接矩陣的自連接過程,D表示度矩陣,D=ΣjAij,DAD表示預處理過程,Ol表示l層的輸出,Wl表示該層的權重矩陣,ReLU(·)是ReLU激活函數。
本文選擇2層GCN模型來獲得空間相關性,實現關鍵信息的匯聚可以表示為:
f(X,A)=ReLU(AReLU(AXW0)W1)
其中X是特征矩陣,A=,W0∈RP*H表示從輸入層到隱藏層的權重矩陣,P是特征矩陣大小,H是隱藏單元的數量,W1∈RH*T表示從隱藏層到輸出層的權重矩陣,f(X,A)∈RN*T表示預測長度為T的輸出。
使用GCN模型從交通數據中學習空間特征。如圖1(a)所示,假設節點1是中心道路,藍色節點表示這些道路與中心道路相連,GCN模型可以獲得中心與周圍道路之間的拓撲關系,對道路網絡的拓撲結構和道路上的屬性進行編碼,然后獲得空間相關性如圖1(b)。
目前處理序列數據使用最廣泛的模型是遞歸神經網絡(RNN)。為了修復梯度消失和梯度爆炸等缺陷,遞歸神經網絡的變體LSTM模型和GRU模型應運而生。然而LSTM訓練時間較長,而GRU模型具有相對簡單的結構、較少的參數和較快的訓練能力。因此本文選擇GRU模型從交通流數據中獲取時間依賴性。GRU通過將時刻t-1的隱藏狀態和當前交通信息作為輸入來獲取時刻t的交通信息。
將具有空間特征的時間序列輸入門控遞歸單元GRU中,通過單元間的信息傳遞獲得道路交通信息數據的動態變化,從而得到時間特征。
GRU有兩個門,分別是重置門rt和更新門ut。重置門rt用于控制候選交通狀態Ct的計算是否依賴上一時刻交通狀態ht-1,更新門ut用于控制當前交通狀態ht需要從上一時刻交通狀態ht-1中保留多少信息,以及需要從候選交通狀態ct中接受多少信息。Xt表示時間t的交通信息,GRU通過將上一時刻交通狀態ht-1和當前交通信息作為輸入來獲得時間t的交通狀態。
其中,f(A,Xt)表示由公式(3)定義的圖卷積過程,W和b表示訓練過程中的權重和偏差。
GRU以t-1時刻的隱藏狀態和當前交通信息為輸入,獲取t時刻的交通信息。該模型在捕獲當前時刻的交通信息的同時,仍然保留了歷史交通信息的變化趨勢,并具有捕獲時間相關性的能力。
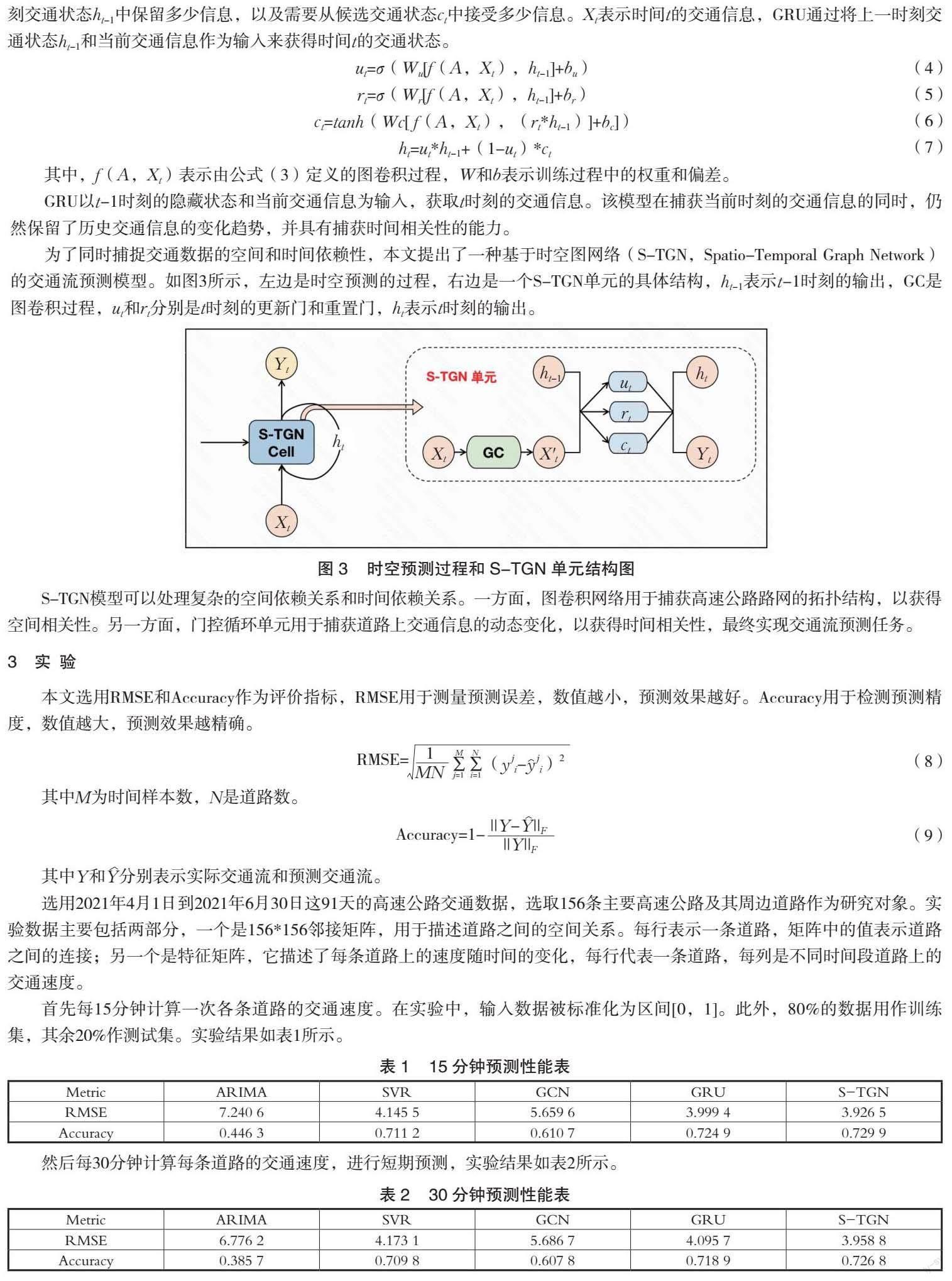
為了同時捕捉交通數據的空間和時間依賴性,本文提出了一種基于時空圖網絡(S-TGN,Spatio-Temporal Graph Network)的交通流預測模型。如圖3所示,左邊是時空預測的過程,右邊是一個S-TGN單元的具體結構,ht-1表示t-1時刻的輸出,GC是圖卷積過程,ut和rt分別是t時刻的更新門和重置門,ht表示t時刻的輸出。
S-TGN模型可以處理復雜的空間依賴關系和時間依賴關系。一方面,圖卷積網絡用于捕獲高速公路路網的拓撲結構,以獲得空間相關性。另一方面,門控循環單元用于捕獲道路上交通信息的動態變化,以獲得時間相關性,最終實現交通流預測任務。
3? ? 實? 驗
本文選用RMSE和Accuracy作為評價指標,RMSE用于測量預測誤差,數值越小,預測效果越好。Accuracy用于檢測預測精度,數值越大,預測效果越精確。
其中M為時間樣本數,N是道路數。
其中Y和Y分別表示實際交通流和預測交通流。
選用2021年4月1日到2021年6月30日這91天的高速公路交通數據,選取156條主要高速公路及其周邊道路作為研究對象。實驗數據主要包括兩部分,一個是156*156鄰接矩陣,用于描述道路之間的空間關系。每行表示一條道路,矩陣中的值表示道路之間的連接;另一個是特征矩陣,它描述了每條道路上的速度隨時間的變化,每行代表一條道路,每列是不同時間段道路上的交通速度。
首先每15分鐘計算一次各條道路的交通速度。在實驗中,輸入數據被標準化為區間[0,1]。此外,80%的數據用作訓練集,其余20%作測試集。實驗結果如表1所示。
然后每30分鐘計算每條道路的交通速度,進行短期預測,實驗結果如表2所示。
最后每60分鐘計算每條道路的交通速度,進行長期預測,實驗結果如表3所示。
可以發現,在短期預測和長期預測中,S-TGN模型相比于其他模型都表現出了最好的預測性能。對于15分鐘交通流預測任務,S-TGN模型和GRU模型的RMSE誤差分別比ARIMA模型低45.77%和32.97%,兩種模型的準確率分別提高了63.54%和62.42%。與SVR模型相比,S-TGN和GRU模型的RMSE誤差分別降低了5.28%和0.67%,比SVR模型準確率高出約2.63%和1.93%。這是由于ARIMA和SVR等方法難以處理復雜的非平穩時間序列數據。GCN模型的預測效果較低是因為GCN只考慮了空間特征,忽略了交通數據是典型的時間序列數據。
4? ? 總? ? 結
本文對高速公路交通流問題進行了抽象化,使得模型在保持預測精度的同時,降低預測的時間復雜度,提高預測模型的實時性。本文從空間依賴性和時間依賴性方面分別進行建模,捕獲了道路網絡的拓撲結構和交通數據的動態變化,構建了一個基于時空圖網絡S-TGN的交通流預測模型,用于高速公路路網的預測,建立了一個長短時交通流預測模型,并取得了很好的效果。
參考文獻:
[1] 徐建閩,尹宏賓.廣珠高速公路交通量預測[J].系統工程理論與實踐,1998(4):123-126.
[2] 撒元功,胡郁蔥,徐建閩.高速公路動態交通流的神經網絡模型[J].華南理工大學學報(自然科學版),2002(8):91-94.
[3] 曲仕茹,陳志強.基于神經網絡的高速公路交通流預測模型及其應用[J].廣東工業大學學報,2008(3):100-102.
[4] 王軍,許宏科,蔡曉峰,等.基于BP神經網絡的高速公路動態交通流預測[J].公路交通技術,2007(1):150-152+163.
[5] 戴洪波,曾獻輝.基于BP神經網絡的高速公路短時交通流預測[J].智能計算機與應用,2015,5(4):36-38+41.
[6] 劉清林,戴紅良.小波濾波BP神經網絡的高速公路節假日擁堵預測分析[J].公路工程,2016,41(6):98-102.
[7] 肖智,李玲玲.PSO-SVM在高速公路交通量預測中的應用[J].管理評論,2011,23(12):32-37+67.
[8] 焦琴琴.基于深度學習的路網短時交通流預測[D].西安:長安大學,2016.
猜你喜歡
建材發展導向(2021年20期)2021-11-20 05:43:18
鴨綠江(2021年17期)2021-10-13 07:05:32
中國交通信息化(2020年8期)2021-01-26 00:51:18
中國交通信息化(2020年10期)2021-01-14 03:29:50
中國交通信息化(2019年6期)2019-08-23 08:28:40
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
中國交通信息化(2017年3期)2017-06-08 06:09:23
中國交通信息化(2016年9期)2016-06-06 07:42:10
小說月刊(2014年4期)2014-04-23 08:52:20
筑路機械與施工機械化(2014年5期)2014-03-01 02:59:08