基于多平臺信息融合的海戰場態勢研判方法*
2023-06-05 00:49:34于藝彬王洪勝傅學慶
艦船電子工程 2023年2期
于藝彬 王洪勝 傅學慶
(海軍大連艦艇學院 大連 116018)
1 引言
遠海大洋廣域遼闊,海戰場中的態勢研判一直以來都是各國軍隊極為重視而又難以做到實時準確掌控的難點問題。受到戰場自然環境、平臺裝備穩定性、敵我斗爭策略等多種復雜因素影響,在己方偵測平臺數量有限、類型單一、裝備可靠性不確定等情況下,對海上目標類型判定特別是對目標在戰場中的價值研判始終是一個較為復雜的問題。隨著各類無人裝備的逐步列裝,包括空中、水面和水下無人力量的大量使用,未來,在對海上目標研判時來自各個平臺的信息數據量將逐步增多,科學地進行信息融合,準確判定目標價值對掌控海戰場態勢具有十分重要的意義。
2 海上目標識別特征指標
2.1 海上目標信息主要偵測平臺
目前可以對海上目標進行偵測的平臺(裝備)主要有:
水面平臺:主要包括裝備有各類主被動雷達、聲納及電子偵查設備的有人水面艦艇和無人水面艦艇;
空中平臺:主要包括預警機、偵察機、反潛機、艦載直升機、艦載固定翼飛機以及各類無人機等;
水下平臺:主要包括潛艇、水下無人潛航器以及各類水下傳感器等;
其他平臺:主要包括島岸觀通站、各類偵察衛星等。
2.2 目標性質劃分
按照海上作戰敵方目標的重要性和戰斗與非戰斗艦艇的性質,海上目標可劃分為以下幾類:
1)大型水面戰斗艦艇(包括航空母艦、兩棲艦等大型水面戰斗艦艇);
2)中型水面戰斗艦艇(包括巡洋艦、驅逐艦、護衛艦、登陸艦、瀕海戰斗艦等中型水面戰斗艦艇);
3)小型水面戰斗艦艇(包括導護艇、導彈艇、無人攻擊艇等小型水面戰斗艦艇);
4)各型軍用輔助艦船(包括掃雷艦艇、補給艦船、救援艦船等作戰輔助艦艇);
5)民用船只(包括商船、貨船、漁船等民用船只)。
2.3 目標識別特征指標
結合現有的研究成果及文獻可知:海上目標探測的技術手段包含使用雷達、紅外、聲納、光學等裝備,收集到的目標特征可分為磁、電、聲、光、尾流、紅外、地震波、重力場、壓力場等[1~5]。目前國外較為成熟的海洋信息監測系統,大都采用的是運用多種方法手段進行聯合探測,多方法可做到優勢互補、取長補短,最大限度發揮系統總體效能,比如電、聲和磁的多元化結合可有效彌補磁、電探測距離有限的問題,也可有效解決聲抗干擾能力弱、存在較高虛警率等問題[6~8];另一方面,同一類目標所產生的輻射噪聲往往會呈現出一定的相似性,而不同類別目標發出的輻射噪聲會產生明顯的差異性,這也為進一步識別海上目標提供了重要的數字基礎[9~10]。
綜上所述,綜合使用各類主動、被動探測器材及外部信息,在缺少直接的光學觀測和船舶自動識別系統(AIS)信息情況下,從可偵測到的目標特性數據,可對不確定的海上目標進行識別的特征指標歸納為以下三類:
1)電磁信號特征方面:主要通過被動雷達、電子偵測設備偵測到目標的電磁信號輻射情況,可區分為軍用電磁信號、民用電磁信號、無電磁信號三大類。
2)雷達散射截面方面:主要通過主動雷達,偵測到目標的雷達反射截面積,可分為大型目標、中型目標、小型目標等。(考慮到現役艦艇中除朱姆沃爾特級等少數艦艇具備一定的隱身性能,且裝備數量極其有限外,大多數艦艇并不具備隱身能力,因此該指標仍具有較強的適用性)。
3)海上噪聲目標輻射信號方面:在小樣本、低信噪比條件下對海上目標輻射噪聲信號采集后,可區分為軍用噪聲信號、民用噪聲信號、無噪聲信號三大類,其中軍用噪聲信號又可以根據與數據庫信息比對辨識情況[10],進行初步對比判定。
3 海上作戰態勢目標研判及決策模型
由于對目標電磁信號特征、海上噪聲輻射信號、雷達散射截面等進行的數據信息采集局限于時-空-頻率的不斷變化,且存在一定的背景干擾,而不同平臺(裝備)偵獲到的數據信息又具有不完整、不連續、不精確等問題,屬于不完備樣本,而D-S證據理論是解決不確定信息處理、降低信噪比和進行信息融合的較為適用的方法之一。
3.1 D-S理論概述
定義1:設定Θ做為辨識框架,如若2Θ→[0,1](其中2Θ為Θ的冪集)為集函數,并且同時滿足:
則稱m 是辨識框架Θ 的基本可信度分配,?A?Θ,m(A)即為基本可信數。
定義2:設定m:2Θ→[0,1]為框架Θ的基本可信度分配,那么把由所定義的函數Bel:2Θ→[0,1]稱為Θ的信度函數。
定義3:設定用Bel1和Bel2表示同一個識別框架Θ上的兩個置信度函數,將m1和m2用于表示與其相對應的基本概率分配函數,用A1,A2,…,Ai和B1,B2,…,Bj分別表示其各自的焦元,設m1(Ai)m2(Bj)<1,則合成規則為[11~12]:
3.2 改進后的信息數據合成方法
考慮到信息融合時應盡可能充分融合來自各個平臺的不同的偵測數據,來源于越多偵測平臺、信息量越大,即樣本數量越多,結果的準確性就會越高。對于多個證據的合成可參考Dempster 證據組合規則:設某個辨識框架Θ 上的證據為m1,m2,…,mn,其相應的合成規則為[13]
此方法較為適用于除存在高沖突情況下的證據融合,但僅僅依據各個證據本身提供的數據進行單一的融合并不完全符合準確性要求,主要局限于:一是各個證據本身的可信度無從衡量。沒有考慮信息源的可信度,這是由證據理論本身的特性所決定的,即認定證據源提供的信息客觀為真,而缺少對信息可信度的判定;二是無法體現信息源所提供信息的可靠度,例如證據源提供的信息本身就存在沖突的情況下,應當如何進行融合,使得在最后進行信息融合時能夠基于相對準確的基本信任分配函數進行,以得到更加科學的最終信任分配。
對海戰場中各個平臺提供的偵測數據,應預先進行處理,針對平臺偵測能力、海區環境得到平臺實時信息偵測能力可信度,而后針對平臺偵測到的各個信息(即焦元)沖突情況進行單平臺偵測信息匹配度分析,并結合價值賦值區間,使用嵌套證據理論的方法進行融合疊加,最終得出目標在態勢中的價值判定。
用Ui表示對第i個平臺的信任度,Uxi表示第x個專家對第i 個平臺的信任度,考慮到證據理論中=1準則,建立歸一化原則:
融合基于專家打分的平臺信任度,使用嵌套融合方法得到平臺實時信息偵測能力可信度Qkxi,依據信息匹配度規則得到初步的平臺偵測信息匹配度Qcxpi,由指揮員戰場經驗,對各目標進行初步價值賦值Jqji。考慮到海戰場環境的特殊性,個別偵測平臺存在偵測信息匹配度低的情況,但匹配度低并不能完全證明該平臺偵測的信息就是無用的或失準的,特別是在偵測窗口較窄、局部海域存在海況特殊性以及目標采取靜默行動等情況下,依此進行證據融合將會造成較大偏差,此時應考慮加入干預閾值,干預閾值主要取決于該平臺的偵察信息可信度分配,得到最終的平臺偵測信息匹配度:
而后對三類信息進行融合,得到目標獨立判定價值Ti:
最后,基于歸一化準則對各個目標獨立判定價值重新建立mass 函數,并依據Dempster 證據組合規則,融合得到最終的價值判定置信度函數。
4 算法應用舉例
某艦艇編隊在遠海航行過程中,發現前方有不明船隊(無AIS 信息),通過各類平臺(裝備)偵測情況,在一定時間內匯總到3 艘不明艦船的相關信息特征如表1所示。
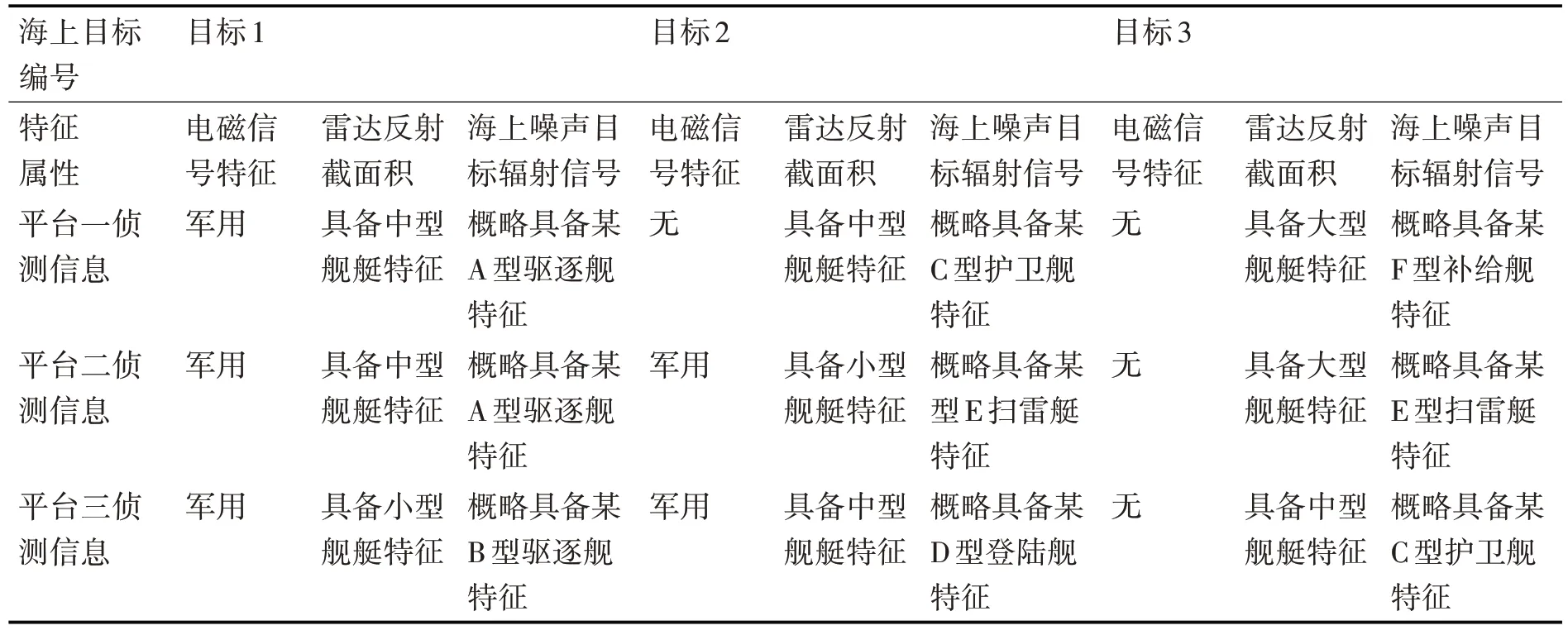
表1 不明目標信息特征表
由于海上目標信息探測存在偵測平臺功能的局限性和偵測到的信息臨時性及不穩定性,因此對偵測到的信息設立匹配度規則,如表2所示。
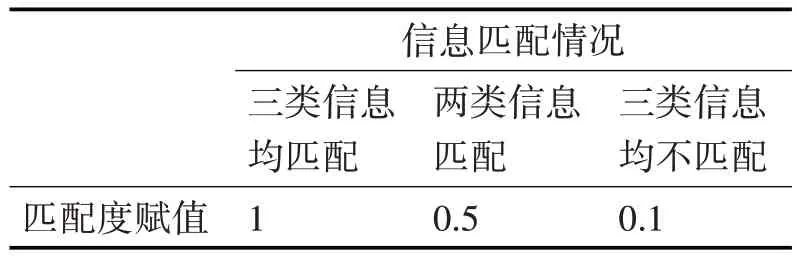
表2 匹配度賦值規則表
首先,對平臺偵察信息可信度進行第一次信息融合,可由專家依據海戰場態勢以及各平臺的偵測能力進行打分,由3 名專家對3 個提供信息的平臺進行可信度打分,如表3所示。
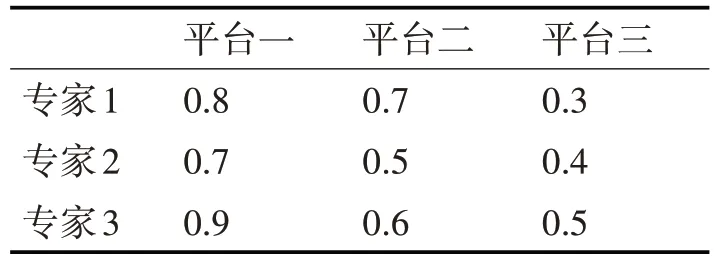
表3 平臺可信度專家評分表
依據式(5),進行歸一化后,得到:
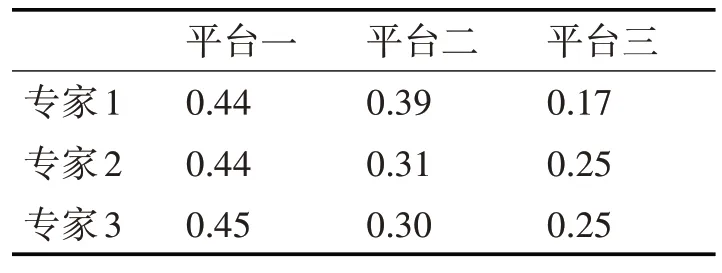
專家1專家2專家3平臺一0.44 0.44 0.45平臺二0.39 0.31 0.30平臺三0.17 0.25 0.25
由式(4),得到β=0.866,由式(3),進一步計算得到:mass(Qkx)=(0.650,0.271,0.079),即為各個平臺的偵察信息可信度分配。
而后,依據偵測信息匹配度規則,基于各平臺偵測到的信息匹配程度及式(6)確定Qxp,如表4所示。
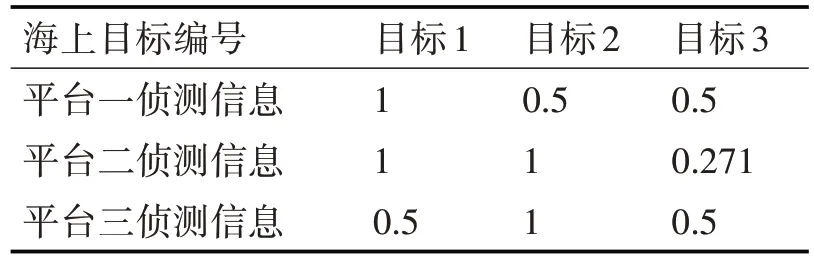
表4 平臺偵測信息匹配度情況表
基于指揮員經驗判定,按照作戰中的高價值目標排序,得:某A 型驅逐艦>某B 型驅逐艦>某C型護衛艦>某D型登陸艦>某F型補給艦>某E型掃雷艇,根據歸一化原則,對5 個目標類型進行價值分配,如表5所示。
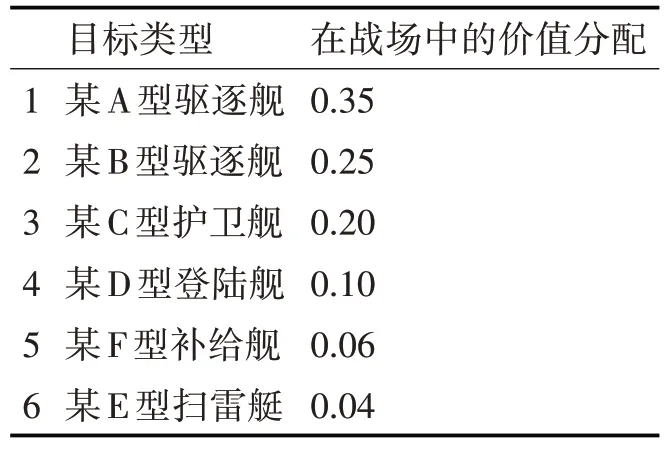
表5 目標價值分配表
根據各平臺偵測到的海上噪聲目標輻射信號的初步比對結果,依據價值分配,得到目標初步的價值區間值Jqj,如表6所示。
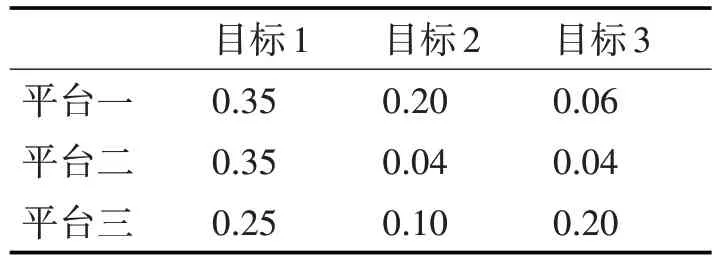
表6 目標初步價值區間值情況表
根據式(7)得到mass 函數:m(T1) =(0.2275,0.065,0.0195),m(T2)=(0.0949,0.0108,0.0029),m(T3)=(0.0099,0.0079,0.0008)。
依據式(5)計算得到新的mass 函數:(0.729,0.208,0.063),(0.874,0.099,0.027),=(0.532,0.425,0.043)。
依據Dempster組合規則,對各個平臺信息進行最終融合,得到:β=0.6521,最終的目標價值置信度=(0.9743,0.0252,0.0002),即目標1 價值>目標2價值>目標3價值。
5 結語
水面艦艇在執行作戰或多樣化軍事任務時,由于受到地球曲率影響,艦艇單艦或小規模編隊僅依靠艦載雷達等設備對海上目標進行探測和識別較為困難,依托衛星、島岸觀通站等手段又受到衛星過頂時間、海區氣象和目標距島岸距離等諸多因素的制約。因此艦艇編隊應充分使用艦載有人機/無人機,以多平臺融合的方式對目標進行搜索識別和綜合研判是非常重要的方法手段[14]。本文基于證據理論,改進了Dempster組合規則具有的局限性問題,所提出的方法在科學研判海戰場態勢上具有較好的借鑒意義。同時,通過平臺可信度融合與偵測信息匹配度衡量,也能夠有效反饋出各類平臺對海上目標偵測的能力,為更好地改進和優化相關平臺的使用提供一定的算法依據。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代出版(2020年3期)2020-06-20 07:10:34
電子制作(2018年11期)2018-08-04 03:25:42
文理導航·科普童話(2016年7期)2017-02-04 15:09:20
小天使·四年級語數英綜合(2016年11期)2016-11-29 22:37:30
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
