基于發(fā)現(xiàn)概率模型的吊放聲納搜潛效能研究*
2023-06-05 00:49:40顧云濤史旭峰
艦船電子工程 2023年1期
顧云濤 李 謙 史旭峰
(1.海軍裝備部西安代表局 西安 710068)(2.中國(guó)船舶集團(tuán)有限公司第七〇五研究所 西安 710077)
1 引言
吊放聲納是指通過(guò)吊放電纜將聲納基陣垂入水中進(jìn)行目標(biāo)探測(cè)的聲納,主要裝備在反潛直升機(jī)上。由于吊放聲納具有搜潛效率高、探測(cè)精度高、體積小、重量輕、操作簡(jiǎn)單、可重復(fù)使用等特點(diǎn),普遍應(yīng)用于反潛直升機(jī)的作戰(zhàn)當(dāng)中[1~3]。在實(shí)際的搜潛任務(wù)當(dāng)中,影響搜潛效能的因素較多,如任務(wù)決心、態(tài)勢(shì)信息、水文參數(shù)、搜潛方法、聲納工作參數(shù)等[4~5]。通過(guò)分析搜潛過(guò)程中的相關(guān)參數(shù)與目標(biāo)發(fā)現(xiàn)概率之間的關(guān)系,可以有效地提升吊放聲納搜潛效能,對(duì)戰(zhàn)術(shù)行為以及后續(xù)的指揮策略提供了重要的理論依據(jù)和模型支撐。
應(yīng)召搜潛是反潛戰(zhàn)中重要的作戰(zhàn)樣式,是指在通過(guò)其它兵力獲得某海域概略位置內(nèi)的敵方潛艇信息,反潛直升機(jī)快速飛抵目標(biāo)出現(xiàn)過(guò)的區(qū)域,通過(guò)多種搜索手段進(jìn)行搜索檢測(cè),進(jìn)而發(fā)現(xiàn)潛艇目標(biāo),實(shí)現(xiàn)對(duì)目標(biāo)的二次搜索,為后續(xù)的反潛打擊作戰(zhàn)提供敵方潛艇準(zhǔn)確的態(tài)勢(shì)信息[6~7]。
針對(duì)目標(biāo)航速已知,航向未知的態(tài)勢(shì)信息,通常采用擴(kuò)展螺旋線的方法實(shí)現(xiàn)應(yīng)召搜潛,文獻(xiàn)[8~12]中分別提出了利用吊放聲納的擴(kuò)展螺旋線搜索方法,通過(guò)對(duì)擴(kuò)展螺旋線方法中的搜潛路徑以及聲納探測(cè)范圍進(jìn)行了優(yōu)化和改進(jìn),利用蒙特卡洛的方法對(duì)發(fā)現(xiàn)概率進(jìn)行了仿真驗(yàn)證,結(jié)果表明此類(lèi)方法可以提高整個(gè)搜潛過(guò)程中的搜潛效能。
然而上述文獻(xiàn)僅通過(guò)蒙特卡洛方法對(duì)不同情況下的搜潛效能進(jìn)行了仿真計(jì)算,未能給出一種有效地計(jì)算某一潛艇分布規(guī)律下的吊放聲納對(duì)目標(biāo)的發(fā)現(xiàn)概率計(jì)算方法。為此,本文結(jié)合反潛直升機(jī)中的搜潛過(guò)程,采用吊放聲納實(shí)現(xiàn)應(yīng)召搜潛作為任務(wù)場(chǎng)景,對(duì)應(yīng)召搜潛中的搜潛概率模型進(jìn)行了深入研究,并對(duì)影響對(duì)敵方目標(biāo)發(fā)現(xiàn)概率的參數(shù)進(jìn)行了仿真分析,并給出了相關(guān)結(jié)論,為后續(xù)的反潛作戰(zhàn)輔助決策提供了理論依據(jù)和算法支撐。
2 吊放聲納應(yīng)召搜潛過(guò)程
反潛直升機(jī)使用吊放聲納進(jìn)行搜潛作戰(zhàn)的基本過(guò)程主要包括起飛準(zhǔn)備、出航、對(duì)潛搜索、返航著陸(艦)等過(guò)程。
對(duì)潛搜索:反潛直升機(jī)到達(dá)搜索海域之后、按照預(yù)定的搜索航線飛行,在第一個(gè)探測(cè)點(diǎn)下降到懸停高度懸停,通過(guò)電纜從機(jī)身內(nèi)下放換能器。根據(jù)海區(qū)深度和水聲環(huán)境,將換能器下放到合適的深度,開(kāi)機(jī)搜索目標(biāo)。
圖1給出了使用吊放聲納執(zhí)行搜潛任務(wù)的示意圖。反潛直升機(jī)從懸停于當(dāng)前探測(cè)點(diǎn)開(kāi)始,至機(jī)動(dòng)到下一個(gè)探測(cè)點(diǎn)并完成懸停所需時(shí)間,定義為搜索周期。搜索周期出要取決于三部分:即反潛直升機(jī)下放、收起吊放聲納換能器所必須花費(fèi)的時(shí)間;換能器在水中工作的時(shí)間(真正有效的探測(cè)時(shí)間);反潛直升機(jī)在兩個(gè)探測(cè)點(diǎn)之間的飛行時(shí)間。因此,吊放聲納搜索周期的計(jì)算公式可以表示為
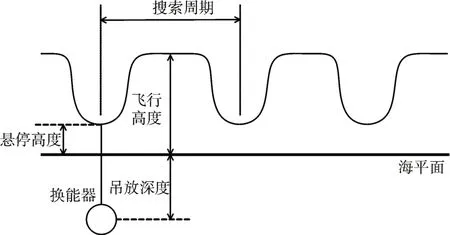
圖1 吊放聲納搜潛過(guò)程示意圖
式中:ttc為吊放聲納在水中的聽(tīng)測(cè)時(shí)間;tdown、tup分別為下放、升起換能器的時(shí)間;tf為反潛直升機(jī)的飛行時(shí)間。
吊放聲納搜索周期的長(zhǎng)短直接影響了搜索效率。但在執(zhí)行一次搜潛任務(wù)過(guò)程中,當(dāng)給出搜潛兵力的武器裝備參數(shù)時(shí),ttc、tdown、tup一般為固定值。因此,搜索周期只與相鄰探測(cè)點(diǎn)之間的飛行時(shí)間tf有關(guān)。
由上面的分析可以看出,整個(gè)應(yīng)召搜潛過(guò)程的時(shí)間可以表示為
其中,T0表示接收到應(yīng)召搜潛任務(wù)后做好飛行準(zhǔn)備,并飛行至首個(gè)探測(cè)點(diǎn)進(jìn)行首次聽(tīng)測(cè)所需時(shí)間;TR表示直升機(jī)執(zhí)行完搜潛任務(wù)之后的返航著陸(艦)時(shí)間;n表示一次搜潛任務(wù)中使用吊放聲納進(jìn)行聽(tīng)測(cè)的次數(shù)。
3 水下機(jī)動(dòng)目標(biāo)散布規(guī)律建模
研究水下機(jī)動(dòng)目標(biāo)的散布規(guī)律模型,可以針對(duì)于在機(jī)動(dòng)時(shí)間內(nèi)的潛艇目標(biāo)的位置分布特點(diǎn),以及高概率出現(xiàn)區(qū)域,制定相對(duì)應(yīng)的搜潛航路、搜潛策略,對(duì)優(yōu)化搜潛指揮決策、分配搜潛兵力武器和提高搜潛效率有著重要意義。
水下機(jī)動(dòng)目標(biāo)位置散布由目標(biāo)的初始位置散布和目標(biāo)機(jī)動(dòng)散布引起。在給定某一確定的機(jī)動(dòng)時(shí)間的前提下,機(jī)動(dòng)散布又與目標(biāo)的航速、航向散布有關(guān)。根據(jù)其他兵力對(duì)于目標(biāo)的初始定位散布規(guī)律以及目標(biāo)航速航向的獲取以及分布規(guī)律情況,初步分析目標(biāo)初始位置散布、目標(biāo)航速散布和目標(biāo)航向散布模型。圖2給出了水下機(jī)動(dòng)目標(biāo)散布模型構(gòu)成的結(jié)構(gòu)圖,從圖2中可以看出,對(duì)于不同的目標(biāo)初始位置分布模型、目標(biāo)航向散布模型和目標(biāo)航速散布模型,可以排列組合出種散布方式。
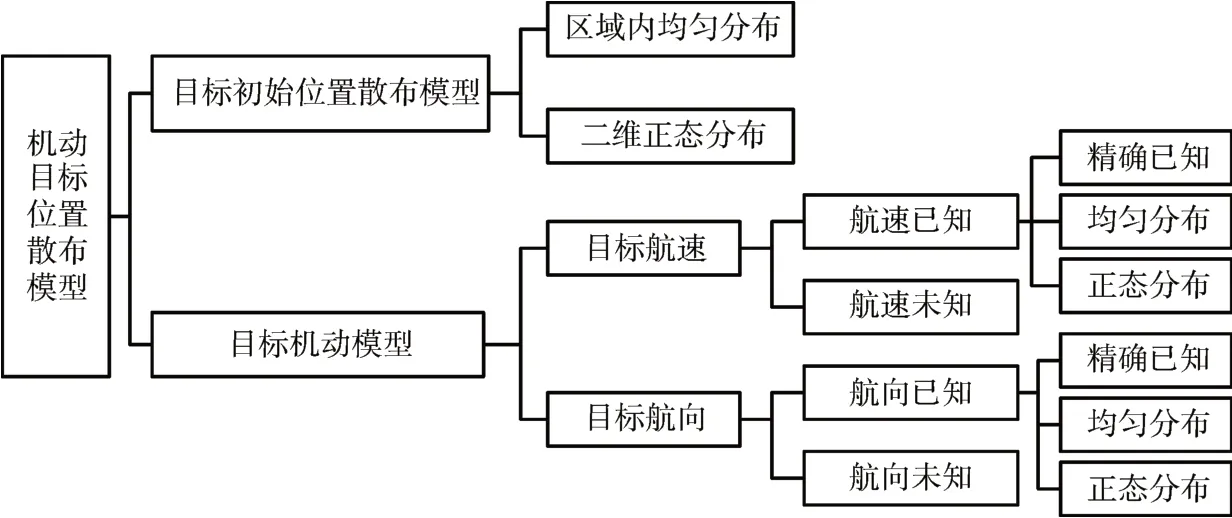
圖2 水下機(jī)動(dòng)目標(biāo)散布模型構(gòu)成的結(jié)構(gòu)框圖
在仿真的過(guò)程中,采取的是由目標(biāo)初始散布規(guī)律為二維正態(tài)分布、目標(biāo)航速精確已知和目標(biāo)航向未知的機(jī)動(dòng)目標(biāo)散布規(guī)律模型。
由于來(lái)自先驗(yàn)信息的目標(biāo)潛艇位置信息具有較大的不確定性,根據(jù)中心極限定理可知,敵目標(biāo)潛艇的初始位置服從二維N(0,σ02)正態(tài)分布,散布中心為坐標(biāo)原點(diǎn),即數(shù)學(xué)期望值為0,敵目標(biāo)潛艇初始位置點(diǎn)(x0,y0)的聯(lián)合概率密度函數(shù)可以表示為
其中,x0,y0相互獨(dú)立且同分布,本文中采取如下假設(shè)σ0x=σ0y=σ0,均服從N(0,σ02)分布,那么目標(biāo)初始位置散布的概率密度函數(shù)可以表示為
令σ0=1km,可以給出目標(biāo)初始二維正態(tài)分布結(jié)果,如圖3所示。
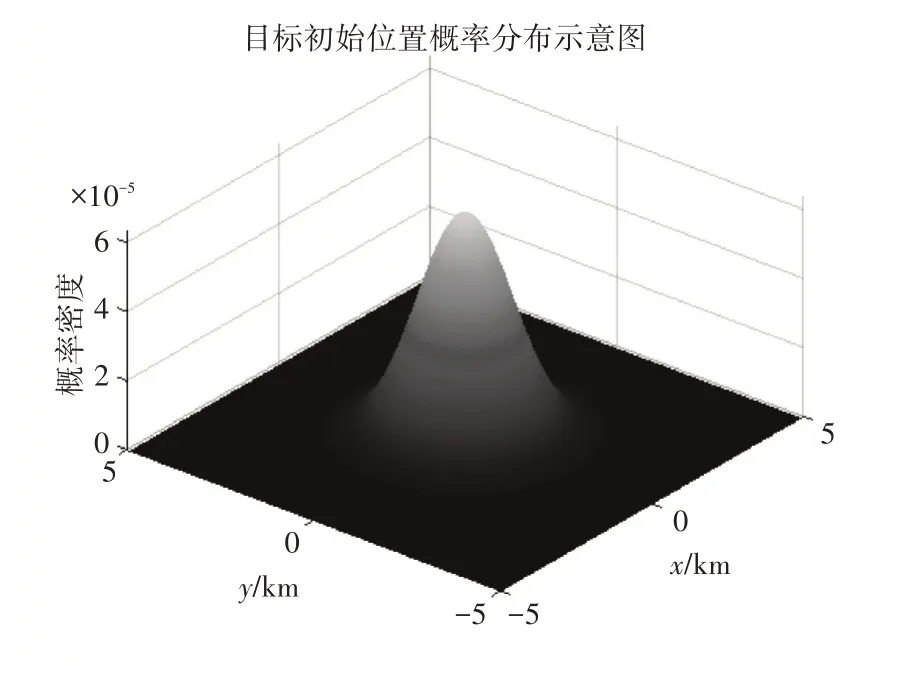
圖3 目標(biāo)初始位置分布圖
假設(shè)目標(biāo)的航速已知,航向在[0,2π]區(qū)間上服從均勻分布,由于潛艇速度vQ已知,當(dāng)反潛直升機(jī)在飛行了T0時(shí)刻后開(kāi)始搜索時(shí),潛艇可能的分布位置為半徑為vQT0,方向?yàn)閇0,2π]區(qū)間上任意角度的圓周上。此時(shí),潛艇的位置散布規(guī)律為瑞利均勻聯(lián)合分布,其概率密度函數(shù)可以表示如下:
圖4給出了目標(biāo)機(jī)動(dòng)距離vQT=9km 時(shí),敵方潛艇位置的概率分布情況。可以看出,此時(shí)目標(biāo)位于圖中環(huán)形峰頂處的概率最大,這與理論常識(shí)相符合。
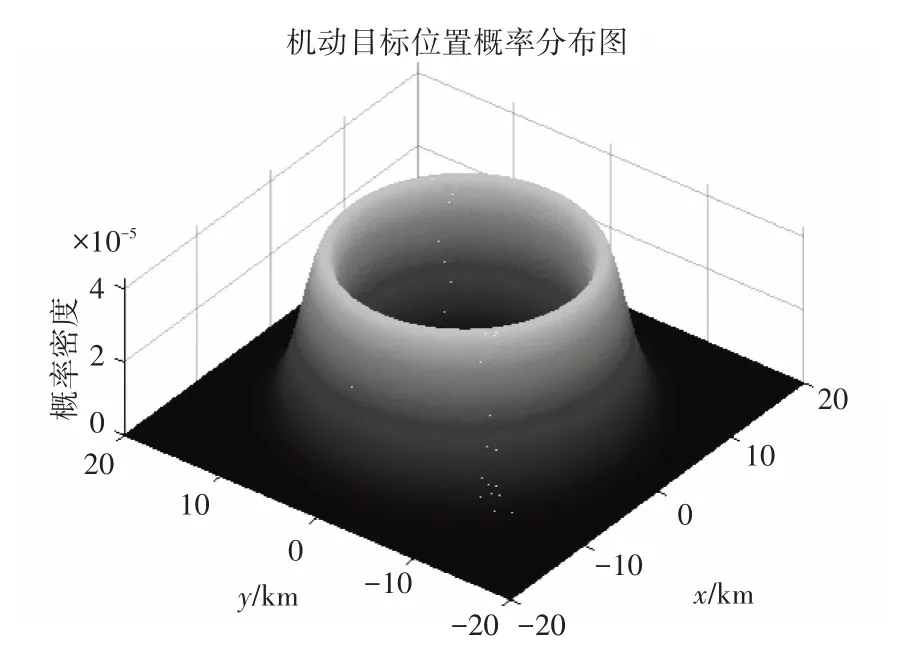
圖4 機(jī)動(dòng)目標(biāo)位置概率分布圖
4 應(yīng)召搜潛中的搜潛方法
應(yīng)召搜潛是指航空搜潛兵力在機(jī)場(chǎng)、載艦或指定空域待命,在獲得敵方潛艇的活動(dòng)情況后,按照上級(jí)的命令出動(dòng),飛往發(fā)現(xiàn)敵方潛艇的海域,搜索敵潛艇的戰(zhàn)斗行動(dòng)。應(yīng)召搜潛屬于二次搜索類(lèi)型,主要由其他的反潛兵力預(yù)先得知潛艇位置,再利用反潛航空兵進(jìn)行搜潛。
假設(shè)潛艇運(yùn)動(dòng)速度已知,航向在[0,2π]區(qū)間上服從均勻分布,發(fā)現(xiàn)目標(biāo)的初始位置與反潛直升機(jī)相距一定距離,則反潛直升機(jī)以最大速度飛往初始發(fā)現(xiàn)區(qū)域,通常采用擴(kuò)展螺旋線搜索的方法實(shí)現(xiàn)應(yīng)召搜索。采用擴(kuò)展螺旋線搜索的方法可以保證在搜索過(guò)程中,反潛直升機(jī)飛行的任一時(shí)刻都能與潛艇保持在以潛艇初始位置點(diǎn)為圓心,以潛艇在延遲時(shí)間內(nèi)的潛艇機(jī)動(dòng)距離為半徑的圓周上。
4.1 擴(kuò)展螺旋線搜索
在使用吊放聲納進(jìn)行應(yīng)召搜潛的過(guò)程中,通常采用等距擴(kuò)展螺旋線的方式進(jìn)行搜索,也就是保持相鄰兩個(gè)懸停點(diǎn)之間的直線距離相等,相鄰探測(cè)點(diǎn)之間的距離可以表示為
其中,d為相鄰兩個(gè)探測(cè)點(diǎn)之間的距離,R為聲納的探測(cè)半徑,η為間距系數(shù),為了以較高的概率發(fā)現(xiàn)敵方潛艇,通常取值為1.0~2.0。由上述搜潛路徑上的懸停點(diǎn)構(gòu)成對(duì)數(shù)螺旋線,其極坐標(biāo)軌跡方程為
其中,r0為潛艇初始位置與反潛直升機(jī)初始位置連線的距離,k為螺旋系數(shù),主要取決于潛艇目標(biāo)運(yùn)動(dòng)速度與我方反潛直升機(jī)速度的大小,具體表達(dá)式如下:
4.2 搜潛方法中的探測(cè)點(diǎn)解算模型
等距擴(kuò)展螺旋線搜索需要保證相鄰兩個(gè)探測(cè)點(diǎn)之間的距離為一固定的常數(shù)d,根據(jù)三角形的相對(duì)位置關(guān)系,利用余弦定理可以得到第i 個(gè)探測(cè)點(diǎn)的距離Ri和θi的表達(dá)式為
其中,Ti表示第i 次使用吊放聲納進(jìn)行探測(cè)的時(shí)間,可以表示為
特別地,規(guī)定R1=vqT0,θ1=0,表示第一個(gè)探測(cè)點(diǎn)位于應(yīng)召位置的正東方向,距離為在首次聽(tīng)測(cè)時(shí)間內(nèi)敵方潛艇目標(biāo)運(yùn)動(dòng)的距離。
4.3 發(fā)現(xiàn)概率模型
在執(zhí)行一次反潛直升機(jī)應(yīng)召搜索任務(wù)時(shí),使用了吊放聲納進(jìn)行了n 次探測(cè),當(dāng)采用一次發(fā)現(xiàn)概率模型時(shí),則該次搜潛任務(wù)下最終的發(fā)現(xiàn)概率可以表示為
其中,Pi為第i次使用吊放聲納的探測(cè)概率。
下面給出單次使用吊放聲納進(jìn)行目標(biāo)探測(cè)的發(fā)現(xiàn)概率模型。假設(shè)吊放聲納探測(cè)一次的區(qū)域?yàn)橐蕴綔y(cè)點(diǎn)為圓心,有效作用距離為半徑的圓形區(qū)域,因此,探測(cè)概率為目標(biāo)位置分布函數(shù)在該區(qū)域內(nèi)的積分。
從上面的推導(dǎo)過(guò)程可以知道,第i 次進(jìn)行探測(cè)時(shí)的探測(cè)點(diǎn)坐標(biāo)可由式(9)給出。第i 次使用吊放聲納進(jìn)行探測(cè)時(shí)的探測(cè)范圍是以第i次探測(cè)點(diǎn)為圓心,以聲納探測(cè)距離為半徑的圓形區(qū)域,其中積分區(qū)域的積分邊界可以由下面的方法給出。
考慮更一般的情況,如圖5所示,在直角坐標(biāo)系下,可知圓心在(xc,yc),半徑為R的圓的方程可以表示為
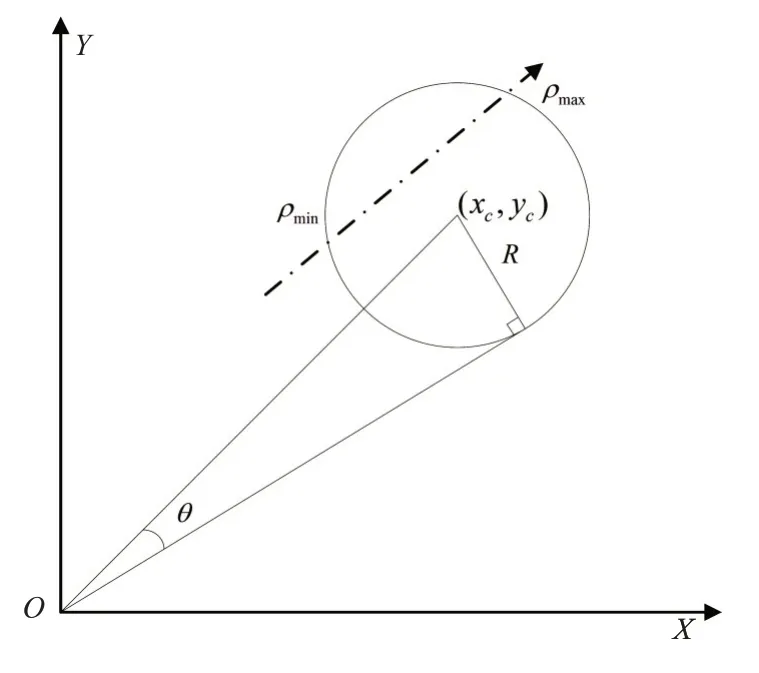
圖5 吊放聲納圓形探測(cè)區(qū)域示意圖
將式(12)其轉(zhuǎn)化為極坐標(biāo)下的方程:
關(guān)于ρ的一元二次方程的解可以表示為
可以寫(xiě)出被積區(qū)域的積分上下限為
其中,f(x,y)為目標(biāo)分布的概率密度函數(shù),D 為某一吊放聲納可以探測(cè)的區(qū)域。
5 仿真實(shí)驗(yàn)
5.1 仿真參數(shù)
在仿真中,假設(shè)敵潛艇的初始位置距本艦100km,潛艇的初始位置分布規(guī)律服從二維正態(tài)分布,定位誤差為σ0=680m。采用應(yīng)召搜潛中的擴(kuò)展螺旋線搜索法對(duì)敵方潛艇目標(biāo)進(jìn)行搜索。敵潛艇平均運(yùn)動(dòng)速度為10kn,初始航向角在[0,2π]之間均勻分布;反潛直升機(jī)的巡航速度為200km/h,吊放聲納水下分機(jī)下放深度為150m,下放速度為3m/s,提升速度為3m/s,探測(cè)時(shí)間為6min,首次聽(tīng)測(cè)時(shí)間T0為30min;吊放聲納的作用距離為4km。
5.2 仿真結(jié)果及分析
本節(jié)通過(guò)計(jì)算機(jī)仿真模擬,依次分析了探測(cè)次數(shù)、吊放聲納間隔系數(shù)和首次聽(tīng)測(cè)時(shí)間對(duì)于目標(biāo)發(fā)現(xiàn)概率的影響。
圖6中給出了當(dāng)目標(biāo)運(yùn)動(dòng)速度為10kn時(shí),我方利用吊放聲納進(jìn)行應(yīng)召搜潛的擴(kuò)展螺旋線搜索的示意圖。圖中的紅色圓形表示在該圓心對(duì)應(yīng)的探測(cè)點(diǎn)的聲納探測(cè)范圍。圖中的紅色折線表示的是該次應(yīng)召搜潛過(guò)程中,反潛直升機(jī)的搜潛路線圖。圖中的黑色圓形虛線表示該時(shí)刻內(nèi)目標(biāo)可能出現(xiàn)的位置所構(gòu)成的同心圓的集合。由于采用擴(kuò)展螺旋搜索的方式進(jìn)行搜索,每次探測(cè)點(diǎn)均位于以應(yīng)召點(diǎn)為圓心,以延遲時(shí)間內(nèi)的潛艇運(yùn)動(dòng)距離為半徑的同心圓周上。
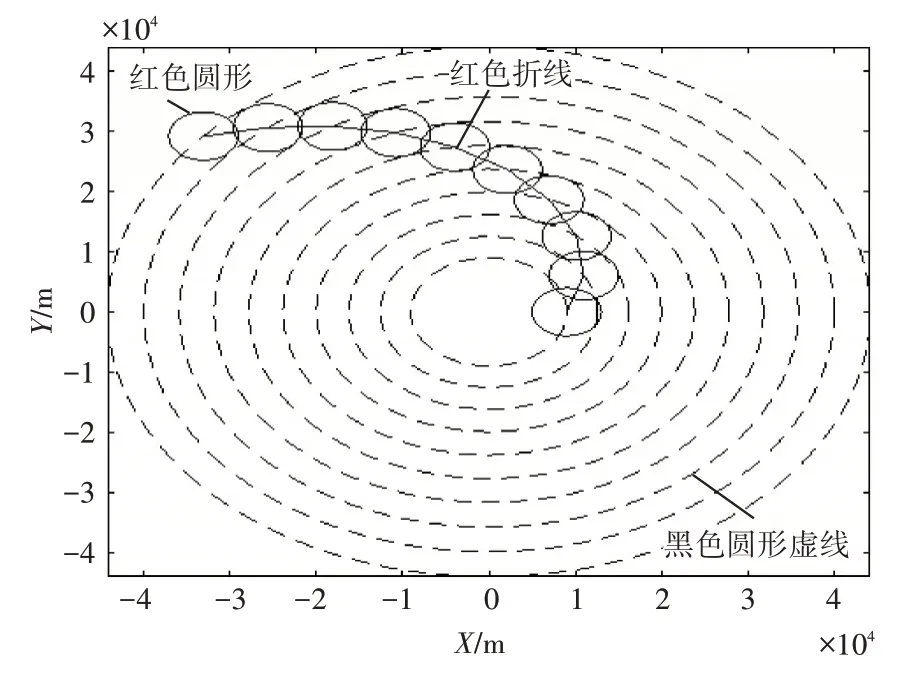
圖6 擴(kuò)展螺旋線搜索路線示意圖
其余仿真條件不變,目標(biāo)的運(yùn)動(dòng)速度分別為10、15、20節(jié)時(shí),圖7給出了目標(biāo)潛艇在不同運(yùn)動(dòng)速度下的探測(cè)概率與吊放聲納的探測(cè)次數(shù)的變化曲線。

圖7 目標(biāo)運(yùn)動(dòng)速度與發(fā)現(xiàn)概率的變化曲線
從圖7中可以看出,在某一固定的潛艇運(yùn)動(dòng)速度下,當(dāng)探測(cè)次數(shù)較少時(shí),任務(wù)搜索概率隨著探測(cè)次數(shù)的增加有明顯提高;然而當(dāng)探測(cè)次數(shù)較大時(shí),增加探測(cè)次數(shù)對(duì)搜索概率的影響并不大,這是因?yàn)槟繕?biāo)散布面積增加,降低了后續(xù)吊放聲納單次探測(cè)的發(fā)現(xiàn)概率。特別地,對(duì)于高速機(jī)動(dòng)目標(biāo),當(dāng)探測(cè)次數(shù)大于5 次時(shí),探測(cè)概率基本趨于穩(wěn)定,即后續(xù)的探測(cè)對(duì)目標(biāo)的發(fā)現(xiàn)概率的影響很小,可以忽略不計(jì)。
當(dāng)目標(biāo)運(yùn)動(dòng)速度從小變大時(shí),我方的搜索概率也隨之降低。值得一提的是,由于采用的是單機(jī)螺旋搜索的方式,導(dǎo)致整體的搜索概率最高僅有40%左右,整體的發(fā)現(xiàn)概率并不高;而對(duì)于高速機(jī)動(dòng)目標(biāo)來(lái)說(shuō),擴(kuò)展螺旋搜索方法的發(fā)現(xiàn)概率僅為21%,發(fā)現(xiàn)概率較低,在實(shí)際的搜潛任務(wù)中,可能難以滿足任務(wù)要求。因此在實(shí)際中搜潛的任務(wù)中,常常采用雙機(jī)/多機(jī)螺旋搜索的方式進(jìn)行搜索,以提升搜索效率。
當(dāng)其余仿真參數(shù)不變時(shí),圖8中分別給出了目標(biāo)不同速度條件下,目標(biāo)的發(fā)現(xiàn)概率與聲納吊放間隔系數(shù)之間的變化曲線。
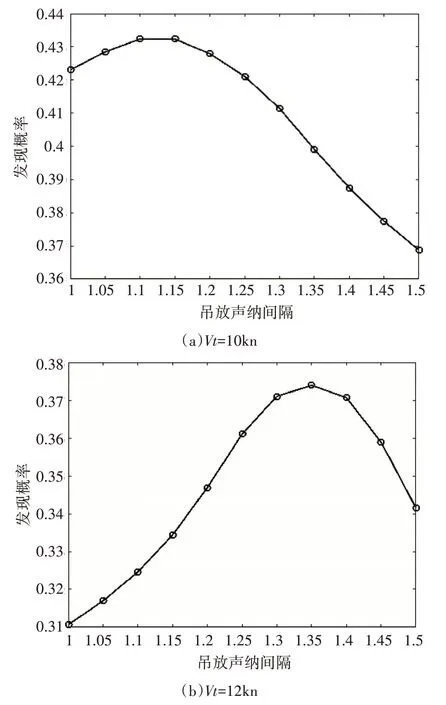
圖8 目標(biāo)發(fā)現(xiàn)概率與吊放聲納間隔系數(shù)的變化曲線
從圖8中可以看出隨著間隔系數(shù)的增加,對(duì)目標(biāo)的發(fā)現(xiàn)概率先增加后減少,目標(biāo)運(yùn)動(dòng)速度的不同決定著拐點(diǎn)的不同。在仿真的參數(shù)條件下,當(dāng)目標(biāo)運(yùn)動(dòng)速度為12kn 時(shí),吊放聲納的間隔取為1.35 倍的聲納探測(cè)半徑時(shí),對(duì)目標(biāo)的發(fā)現(xiàn)概率最大。當(dāng)目標(biāo)運(yùn)動(dòng)速度為10kn 時(shí),吊放聲納的間隔取為1.15倍的聲納探測(cè)半徑時(shí),對(duì)目標(biāo)的發(fā)現(xiàn)概率最大。
圖9給出了其余仿真參數(shù)條件不變時(shí),目標(biāo)發(fā)現(xiàn)概率與首次聽(tīng)測(cè)時(shí)間之間的變化曲線。

圖9 目標(biāo)發(fā)現(xiàn)概率與首次聽(tīng)測(cè)時(shí)間的變化曲線
從圖9中可以看出,隨著首次聽(tīng)測(cè)時(shí)間的增加,目標(biāo)的發(fā)現(xiàn)概率也隨之降低。當(dāng)延遲時(shí)間從10min 增加為30min 時(shí),對(duì)目標(biāo)發(fā)現(xiàn)概率從78%下降到43%,對(duì)敵方潛艇目標(biāo)的發(fā)現(xiàn)概率大幅度降低。這是因?yàn)殡S著首次聽(tīng)測(cè)時(shí)間的增加,目標(biāo)在該時(shí)間段內(nèi)的活動(dòng)范圍也隨之增加,是的我方反潛直升機(jī)需要搜索的范圍變大,不利于發(fā)現(xiàn)目標(biāo),這與已有的理論是相吻合的。為了提高對(duì)于敵方潛艇目標(biāo)的發(fā)現(xiàn)概率,應(yīng)盡量縮短反應(yīng)時(shí)間,盡可能提高兵力準(zhǔn)備速度,盡可能地減小首次聽(tīng)測(cè)所需要的時(shí)間,可以大大提升對(duì)目標(biāo)的發(fā)現(xiàn)概率。
6 結(jié)語(yǔ)
本文通過(guò)建立反潛直升機(jī)采用吊放聲納進(jìn)行應(yīng)召搜索時(shí)的搜索模型,結(jié)合了機(jī)動(dòng)目標(biāo)位置散布規(guī)律、單次探測(cè)的發(fā)現(xiàn)概率計(jì)算方法,仿真分析了采用擴(kuò)展螺旋搜索方法時(shí)的探測(cè)次數(shù)、目標(biāo)航速、間隔系數(shù)和首次聽(tīng)測(cè)時(shí)間對(duì)于敵方潛艇目標(biāo)發(fā)現(xiàn)概率的影響。本文中給出的模型及對(duì)敵潛艇目標(biāo)的發(fā)現(xiàn)概率的計(jì)算公式正確,得出的結(jié)論可信,可用于為指揮員提供反潛作戰(zhàn)指揮搜潛方案的輔助決策。
然而,本文所提出的搜潛效能評(píng)估模型僅考慮了單機(jī)搜索的情形,后續(xù)將結(jié)合現(xiàn)代編隊(duì)作戰(zhàn)的特點(diǎn),在搜潛模型中引入編隊(duì)協(xié)同搜潛的概念,對(duì)搜潛方案中的兵力路徑規(guī)劃以及協(xié)同搜潛效能評(píng)估開(kāi)展更為深入的研究。