分布式驅動電動汽車附著穩定性控制
2023-06-08 09:16:24張文通王軍年趙景波
重慶理工大學學報(自然科學) 2023年5期
關鍵詞:分配
張文通,孫 文,2,,王軍年,張 屹,趙景波,2
(1.常州大學 機械與軌道交通學院,江蘇 常州 213164;2.常州工學院 汽車工程學院, 江蘇 常州 213032;3.吉林大學 汽車仿真與控制國家重點實驗室, 長春 130022)
0 引言
隨著傳統能源日趨枯竭與環境污染日漸加重,在汽車領域,以電機為驅動裝置的電動汽車將逐漸取代以發動機為動力源的傳統燃油汽車。如今,電動汽車正迎來飛速發展,其操縱穩定性、安全性一直為人們所關注。分布式驅動電動汽車由于其傳動鏈短、傳遞效率高、電機響應迅速以及四輪轉矩可解耦,在提高車輛極限工況下的操縱穩定性與安全性方面具有突出優勢,成為國內外學者的重點研究對象[1-2]。
在極限工況下,由于輪胎與地面之間存在的非線性耦合特性,簡單的轉矩分配方式難以滿足車輛附著穩定性要求。針對車輛附著穩定性問題,國內外研究主要集中在改善控制策略結構、提高控制算法性能和優化轉矩分配目標函數等方面。
在改善控制策略結構方面:歐健等[3]基于滑模控制與電液協調系統,制定分層式橫擺穩定性控制策略,通過NI硬件在環系統進行驗證。Chen等[4]搭建電子穩定程序和動態轉矩分配系統的遞階協調控制模型,進行性能仿真測試和硬件在環實驗。Zhu等[5]針對低摩擦系數路面上輪胎的動態特性,在主動安全控制層調節前輪轉角和附加橫擺力矩,根據駕駛員動態需求和執行器約束,在能效控制層設計模型預測控制的轉矩分配控制器。在提高控制算法性能方面:黃彩霞等[6]基于區域極點配置方法,分析設計權重矩陣參數,制定了輪轂電機轉矩分配橫擺穩定性控制策略。Guo等[7]采用自適應分層控制架構軌跡跟蹤方法,上層通過滑模控制器求解所需前輪轉角和附加橫擺力矩,下層采用偽逆控制算法對四輪轉矩優化分配。Liu等[8]提出了一種動態直接橫擺力矩控制器,采用數據融合技術,利用無跡粒子濾波器估計側偏角與橫擺角速度,實現車輛縱向、橫向穩定性。Wei等[9]提出了一種基于深度強化學習的轉矩分配策略,并采用一種雙延遲的深確定性策略梯度算法以降低能耗。在優化轉矩分配目標函數方面:張雷等[10]采用分層架構軌跡跟蹤與直接橫擺力矩協調控制策略,考慮系統多約束非線性問題,以輪胎負荷率最小對四輪轉矩優化分配。王軍年等[11]針對車輪滑轉率的抑制和過彎性能的改善問題,提出了一種基于輪胎縱向剛度估計和最佳滑轉率識別的轉矩分配控制策略。但在現有研究中,很少從車輪垂向載荷轉移影響輪胎附著裕度的角度,來分析對車輛的附著穩定性的影響,因而本文對車輛主動安全控制技術的發展具有一定的探究意義。
本文從輪胎與地面動力學特性變化造成車輪垂向載荷轉移,引起輪胎附著裕度改變的角度出發,分析了影響車輛附著穩定性的因素。采用分層式控制結構,上層以橫擺角速度與質心側偏角為控制目標,求出需求附加橫擺力矩,下層根據垂向載荷比例分配四輪轉矩,以實現車輛附著穩定性控制。通過構建Matlab/Simulink與CarSim聯合仿真測試平臺和搭建dSPACE LabBox與Matlab/Simulink、CarSim駕駛模擬器臺架的硬件在環實驗平臺,對不同轉矩分配方式下車輛附著穩定性相關評價指標進行對比分析,以驗證轉矩分配方案的合理性與控制策略的有效性。
1 車輪垂向載荷與附著裕度機理
1.1 車輪垂向載荷轉移對附著裕度影響分析
車輛模型以整車質心為原點,建立坐標系oxyz,如圖1所示。

圖1 車輛模型坐標圖
圖1中:Fxij、Fyij分別為各輪縱向力、側向力;δij為各輪轉角;αij為各輪側偏角;vxij為各輪速度;vx、vy分別為縱向車速、側向車速;V為質心速度;β為質心側偏角;r為橫擺角速度;d為輪距;a、b分別為質心到前軸、后軸的距離;l=a+b為前后軸距;ij=fl、fr、rl、rr分別為左前輪、右前輪、左后輪、右后輪。
沿x軸的縱向運動:
Fxrl+Fxrr-Fyflsinδfl-Fyfrsinδfr
(1)
沿y軸的側向運動:
Fyrl+Fyrr+Fxflsinδfl+Fxfrsinδfr
(2)
繞z軸的橫擺運動:

Fxflsinδfl+Fxfrsinδfr)a-(Fyrl+Fyrr)b+
(Fxfrcosδfr-Fxflcosδfl+Fyflsinδfl-
Fyfrsinδfr+Fxrr-Fxrl)d/2
(3)
式中:m為整車質量;Iz為繞z軸轉動慣量。
各輪垂向載荷:

(4)
式中:Fzij為各輪垂向載荷;ax、ay分別為縱向加速度、側向加速度;h為質心高度;g為重力加速度。
由式(4)可知,車輛受駕駛員加、減速及轉向操縱,車輪垂向載荷發生轉移。由于縱向力與側向力高度耦合,當某一車輪垂向載荷增大,其所能利用的極限附著力增大,反映在附著橢圓邊界范圍變大,說明該車輪擁有更大的附著裕度。在車輛附著穩定性控制時,應充分利用垂向載荷大的車輪具有附著裕度較大的特性,對其施加較大的驅動轉矩,以避免輪胎處于非線性區時,受附著橢圓約束而達到飽和極限,造成車輛失穩。
附著橢圓可表述為:
(5)
式中,μ為路面附著系數。
為了充分體現車輛附著穩定性的控制效果以及考慮輪胎非線性特性對附著裕度的影響,引入輪胎附著率[12]:
(6)
式中,ρij為各輪附著率。
由式(6)可知,輪胎附著率反映了車輪對地面的附著利用情況,附著率越小,附著裕度越大,附著穩定性越好。但四輪附著率難以實現同時降低,通常會由于某一車輪附著率降低,引起其他車輪附著率提高。因而,應降低高附車輪附著率,以避免達到附著極限;提高低附車輪附著率,以充分利用地面提供的附著條件。
為了反映各輪附著裕度大小,定義輪胎附著率偏離程度,作為車輛附著穩定性的評價指標:
(7)
式中,S為輪胎附著率偏離程度,反映各輪附著率的離散情況。
1.2 根據垂向載荷比例分配轉矩合理性驗證
選取“U”型彎道作為仿真工況,采用2組實驗對比方案,將根據垂向載荷比例分配四輪轉矩方式與平均分配四輪轉矩方式進行車輛附著穩定性合理性驗證。
方案1:入彎半徑為90 m,車輛分別以40、60、80 km/h勻速行駛。
方案2:入彎半徑分別為50、90 m,車輛以 60 km/h勻速行駛。
為了描述車輪垂向載荷轉移對附著穩定性的影響,對部分參數仿真結果作說明:
1) 行駛軌跡。車輛行駛軌跡基本重合。
2) 前輪轉角。當車輛行駛在直線路段時,2種轉矩分配方式下前輪轉角基本相同。當車輛駛入彎道路段時,根據垂向載荷比例分配四輪轉矩方式前輪轉角比平均分配四輪轉矩方式要小,并表現為:當入彎半徑相同時,車速越大,或當車速相同時,入彎半徑越小,2種轉矩分配方式下的前輪轉角偏差均變大。
3) 橫擺角速度與質心側偏角。2種轉矩分配方式下車輛行駛軌跡一致,其橫擺角速度趨于重合。根據垂向載荷比例分配四輪轉矩方式比平均分配四輪轉矩方式在入彎處的質心側偏角更大,并表現為:當入彎半徑相同時,車速越大,或當車速相同時,入彎半徑越小,2種轉矩分配方式下的質心側偏角偏差均變大。
4) 總的輪胎附著率。2種分配方式下總的輪胎附著率基本相同,說明根據垂向載荷比例分配四輪轉矩方式并未降低總的輪胎附著率,不能反映車輛附著穩定性好壞。
當車輛行駛在直線路段時,根據垂向載荷比例分配四輪轉矩方式的各輪附著率十分接近,而平均分配四輪轉矩方式出現了較大的附著率偏差。當車輛駛入彎道路段時,2種轉矩分配方式都表現為:當入彎半徑相同,車速越大,或當車速相同,入彎半徑越小,各輪附著率均變大。如圖2—5分別為4次仿真測試下各輪附著率曲線。

圖2 入彎半徑90 m、車速40 km/h的四輪附著率

圖3 入彎半徑90 m、車速60 km/h的四輪附著率

圖5 入彎半徑50 m、車速60 km/h的四輪附著率
其中,紅色表示平均分配四輪轉矩方式,藍色表示根據垂向載荷比例分配四輪轉矩方式,且LF、RF、LR、RR分別表示左前輪、右前輪、左后輪、右后輪,分別用實線、虛線、點線、點劃線區分。
根據垂向載荷比例分配四輪轉矩方式比平均分配四輪轉矩方式在均衡各輪附著率方面更具優勢,表現為:當入彎半徑相同,車速越大,或當車速相同,入彎半徑越小,其在改善輪胎附著裕度方面效果越明顯。圖6—9分別為4次仿真測試下輪胎附著率偏離程度曲線。

圖6 入彎半徑90 m、車速40 km/h的附著率偏離程度

圖7 入彎半徑90 m、車速60 km/h的附著率偏離程度

圖8 入彎半徑90 m、車速80 km/h的附著率偏離程度

圖9 入彎半徑50 m、車速60 km/h的附著率偏離程度
圖中,平均分配指平均分配四輪轉矩方式,垂載分配指根據垂向載荷比例分配四輪轉矩方式。
通過上述分析表明:根據垂向載荷比例分配四輪轉矩方式相比于平均分配四輪轉矩方式,不僅降低了高附車輪附著率,提升其附著裕度,也提高了低附車輪附著率,改善其附著利用情況。考慮車輪垂向載荷轉移對輪胎附著裕度的影響,根據垂向載荷比例分配四輪轉矩可提高車輛的附著穩定性。
2 車輛附著穩定性控制器設計
為了進一步說明根據垂向載荷比例分配四輪轉矩在改善車輛附著穩定性和避免過大橫擺力矩使車輛偏離期望行駛軌跡方面的優勢,引入直接橫擺力矩控制,通過附加橫擺力矩修正車身姿態,從而更大程度地提高車輛附著穩定性。
由于附加橫擺力矩是通過調節各輪驅動轉矩輸出大小產生的,可根據車輛的實際運動狀態、駕駛員的駕駛意圖和輪胎的附著特性等有針對性地實時調節車輛行駛狀態,改善其轉彎行駛過程中的機動性和穩定性。在車輛行駛過程中,質心側偏角與橫擺角速度是車輛穩定性的重要表征參數,因而將這2個參數作為控制器設計的控制目標。
2.1 上層-附加橫擺力矩決策層
2.1.1參考模型
線性2自由度車輛模型結構簡單、計算效率高、參數響應快,常被用于車輛動力學研究的基礎模型。為了得到期望的質心側偏角與橫擺角速度,本文將其作為參考模型。
針對參考模型作如下假設:忽略轉向和懸架系統,以前輪轉角為輸入,只做平行于地面的運動;忽略空氣阻力和滾動阻力,以及左右輪間載荷轉移對輪胎特性的影響;假設驅動力很小,并沿x軸方向縱向車速不變;側向加速度限定在0.4g以下,輪胎側偏特性處于線性范圍內。
參考模型以整車質心為原點,建立坐標系oxyz,如圖10所示。

圖10 參考模型坐標圖
沿y軸的側向運動:
(8)
繞z軸的橫擺運動:
(9)
式中:Fyf、Fyr分別為前、后輪側向力;δ為前輪轉角;vxf、vxr分別為前、后輪速度;αf、αr分別為前、后輪側偏角;Cf、Cr分別為前、后輪側偏剛度。
當車輛做等速圓周運動時,產生的質心側偏角與橫擺角速度的響應值即為期望值:
(10)
(11)
式中:K=m(a/Cr-b/Cf)/l2為穩定性因數;βd、rd分別為期望的質心側偏角與橫擺角速度。
在此工況下,參考模型的側向加速度:
(12)
式中,R為車輪半徑。
在實際行駛過程中,車輪受到路面附著條件約束,當側偏角不斷增大,輪胎易進入非線性區,此時側向加速度滿足:
ay≤0.85μg
(13)
當輪胎處于非線性區時,期望的質心側偏角與橫擺角速度滿足:
βdmax=arctan(0.02μg)
(14)
rdmax=0.85μg/vx
(15)
因而,期望質心側偏角與橫擺角速度:
(16)
(17)
具有附加橫擺力矩的狀態空間方程[13]:

(18)
2.1.2模型預測控制
模型預測控制具有較強的魯棒性,善于解決系統多輸入輸出問題,以及各種不可預測因素對車輛穩定性的干擾。通過實時滾動優化,將實際測得的車輛參數反饋矯正,使預測值趨近當前系統狀態的期望值。
對式(18)進行離散化處理:

(19)
假設控制時域步長等于預測時域步長,則在預測時域內的控制輸出:
(20)

為了減小計算量和提高效率,假設所有時刻系統期望控制輸出與控制輸入在預測時域內保持不變。根據選取的控制目標,使實際值趨近期望值,構建目標函數[14-15]:

(21)

將式(21)展開得:

(22)
式中,Yk、Uk分別為k時刻的預測輸出與控制輸入。
為了方便計算,采用二次規劃方法對控制目標函數進行求解:

(23)
2.2 下層-四輪轉矩優化分配層
車輛行駛產生的橫擺力矩由輪胎所受縱向力、側向力共同作用產生。分布式驅動電動汽車各輪縱向力可通過人為直接輸出轉矩進行獨立控制,而側向力是通過轉向系統進行間接控制。為了得到符合駕駛員駕駛意圖且直接可控的附加橫擺力矩,這里僅考慮通過調控輸出轉矩產生的縱向力,對整車形成的附加橫擺力矩進行優化分配。
由于車輪垂向載荷轉移對輪胎附著裕度的影響,制定根據垂向載荷比例分配四輪轉矩的優化目標函數。
目標函數1:在平均分配四輪轉矩基礎上,根據垂向載荷比例分配附加橫擺力矩。

(24)
目標函數2:在根據垂向載荷比例分配四輪轉矩基礎上,對附加橫擺力矩根據垂向載荷比例進行再次分配。

(25)
式中:Tdes為總的需求轉矩;Tij為各輪輸出轉矩;∑FZij為總的垂向載荷。
3 仿真分析與實驗驗證
3.1 CarSim整車模型構建
選取CarSim車輛模型庫中的“B-Class,Hatchback”作為離線仿真測試與硬件在環實驗的整車模型,整車參數如表1所示。

表1 整車參數
由于CarSim目前僅有針對傳統燃油汽車或混合動力汽車的整車模型,尚缺少純電動汽車整車模型。為了驗證控制策略的有效性,基于Matlab/Simulink平臺搭建電機與電池模型,并將CarSim整車模型中的傳動系統,包括發動機、差速器等部件截斷,外接搭建的電機與電池模型。電機模型是依據電機的轉矩、轉速等基本參數構建MAP圖,再通過查表的方式建立的,電池模型也采用查表法搭建而成。
為了驗證所搭建的整車模型的準確性與有效性,本文將僅使用CarSim整車模型作為對照組,采用相同的動力輸出方式。通過仿真結果對比分析,輸出的相關參數基本一致,說明所搭建的整車模型是有效的,可作為驗證控制策略的基礎車輛模型。但由于整車模型的搭建并不是研究重點,其相關驗證過程不作過多闡述。
3.2 分層式控制策略平臺搭建
根據所制定的分層式控制策略,搭建離線仿真測試與硬件在環實驗平臺流程如圖11所示[16-17]。
所制定的控制策略在車輪垂向載荷轉移引起輪胎附著裕度變化機理分析與仿真測試基礎上,設計由附加橫擺力矩決策層與四輪轉矩優化分配層組成的分層式控制器。附加橫擺力矩決策層以車輪轉角、縱向車速為參考模型輸入,求解期望的質心側偏角與橫擺角速度,并與CarSim模型輸出的實際值形成偏差,作為模型預測控制器輸入,求解維持車輛附著穩定所需的附加橫擺力矩。四輪轉矩優化分配層根據車輪垂向載荷比例構建優化目標函數,將上層求得的附加橫擺力矩分配給各輪,提高附著穩定性。
通過搭建Matlab/Simulink與CarSim聯合仿真測試平臺,對控制策略進行離線仿真測試,并基于硬件在環系統進行HIL在線實驗驗證。
3.3 控制策略仿真分析
離線仿真測試選取“J”型彎道工況,車輛以 90 km/h勻速行駛,入彎半徑為80 m,仿真時長為12 s。
針對以下曲線作如下說明:平均、垂載、平均+垂載、垂載+垂載分別指平均分配四輪轉矩、根據垂向載荷比例分配四輪轉矩、根據目標函數1分配四輪轉矩、根據目標函數2分配四輪轉矩,且分別用紅色實線、藍色虛線、綠色點劃線、黑色點線區分,且左前輪、右前輪、左后輪、右后輪附著率分別用實線、虛線、點劃線、點線區分。
4組仿真測試下車輛行駛軌跡基本重合,未發生失穩,如圖12所示。
當車輛行駛在直線路段時,4種轉矩分配方式下前輪轉角都很小且基本重合。當車輛駛入彎道路段時,平均、垂載+垂載產生了更大的前輪轉角,最大值分別為0.071、0.074 rad,而平均+垂載產生的前輪轉角最小,最大值僅為0.051 rad,如圖13所示。

圖13 前輪轉角曲線
當車輛行駛在直線路段時,4種轉矩分配方式下各輪附著率都很小,且總的附著率基本相同。當車輛駛入彎道路段時,平均、垂載+垂載的附著率偏離程度最大,最大值分別為18.37%、16.15%,此時車輛具有較差的附著穩定性。而平均+垂載的附著率偏離程度最小,最大值僅為11.34%,明顯降低了高附車輪附著率和提高了低附車輪附著率,如圖14—16所示。

圖14 四輪附著率曲線

圖15 總的附著率曲線

圖16 附著率偏離程度曲線
通過上述分析可知:當車輛駛入彎道時,平均、垂載+垂載產生的前輪轉角更大,且不利于輪胎附著率的合理利用。而平均+垂載比較于其他3種轉矩分配方式具有明顯的改善輪胎附著裕度的效果,從而提高了車輛的附著穩定性。
3.4 硬件在環實驗驗證
硬件在環實驗選取“直線+彎道”工況,車輛以60 km/h勻速行駛,入彎半徑為80 m,仿真時長為40 s。
4種轉矩分配方式下的車輛行駛軌跡基本重合,未發生失穩,如圖17所示。

圖17 行駛軌跡曲線
當車輛行駛在直線路段時,4種轉矩分配方式下前輪轉角都很小且基本重合。當車輛駛入彎道路段時,平均、垂載、垂載+垂載產生的前輪轉角最大值分別為0.041、-0.040、-0.038 rad。而平均+垂載產生的前輪轉角最小,最大值僅為0.036 rad,此時車輛具有更好的操縱穩定性,如圖18所示。

圖18 前輪轉角曲線
車輛在行駛過程中,平均+垂載的各輪附著率較為接近,產生的總的附著率較低,且附著率偏離程度最小,最大值僅為2.34%。而平均、垂載+垂載體現出較差的控制效果,其附著率偏離程度最大值分別為3.33%、3.39%。實驗結果表明:4種轉矩分配方式在改善輪胎的附著裕度和提高車輛的附著穩定性方面的控制效果:平均+垂載>垂載>平均>垂載+垂載,如圖19—21所示。

圖19 四輪附著率曲線
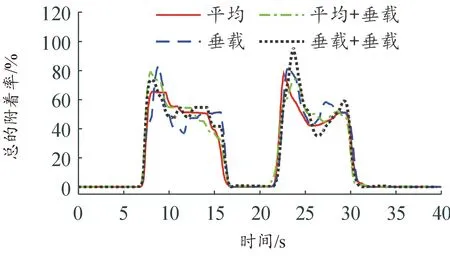
圖20 總的附著率曲線

圖21 附著率偏離程度曲線
通過離線仿真測試與硬件在環實驗結果對比分析,說明了車輪垂向載荷轉移對輪胎附著裕度變化的重要影響,驗證了根據垂向載荷比例分配四輪轉矩的合理性與本文所制定的控制策略在改善車輛附著穩定性方面的有效性。
4 結論
針對提高車輛附著穩定性控制問題,文中從機理上說明了車輪垂向載荷轉移對附著裕度的深刻影響,構建了根據車輪垂向載荷比例分配四輪轉矩的目標函數,引入直接橫擺力矩控制,以實現對車輛的實時調整和修正。仿真測試與硬件在環實驗結果表明,驗證根據車輪垂向載荷比例分配四輪轉矩的直接橫擺力矩控制策略能有效提高輪胎的附著裕度,改善車輛的附著穩定性。同時,提出的附著率偏離程度可直觀反映各輪附著率的離散情況,在一定程度上可作為車輛附著穩定性的評價指標。
猜你喜歡
天水行政學院學報(2022年4期)2022-11-18 09:02:36
艦船科學技術(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
中學生數理化·中考版(2018年10期)2018-12-07 00:44:52
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學院學報(2017年1期)2017-04-16 05:34:07
中國衛生(2014年12期)2014-11-12 13:12:40