改進的十二扇區磁鏈判斷方法的直接轉矩控制
2023-06-09 04:13:14徐志佳宋景
電子制作 2023年8期
徐志佳,宋景
(貴陽學院 機械工程學院,貴州貴陽,550005)
0 引言
直接轉矩控制(Direct Torque Control, DTC)的本質是在靜止兩相坐標系下直接控制異步電機的定子磁鏈和電磁轉矩[1]。DTC 算法具有動態響應快、對干擾信號魯棒性強等優點,但由于在低速區定子的電阻壓降提升導致磁鏈波形畸變,開關頻率不恒定等因素的影響,導致轉矩、電流脈動大,從而限制了直接轉矩控制的應用。
針對上述問題,國內外學者在確保動態響應快的前提下,提出了一系列的改進策略。上海大學宋文祥團隊增加了延時補償緩解和優化矢量選擇器,抑制了由控制延時導致的電流紋波和轉矩脈動[2]。文獻[3]利用了智能算法將模糊控制和電壓矢量占空比技術相結合,但增大了平均開關頻率。文獻[4]將弱磁升速理論與電壓空間矢量調制的DTC 融合,拓展了電機的調速范圍,可達到額定轉速三倍以上的擴速效果,并在一定程度上減小了轉矩脈動。文獻[5]以七相感應電機為例,提出了一種新的結合占空比優化算法的時序策略來選擇最優電壓。文獻[6]對定子磁鏈扇區進行了細分,通過預測控制選擇最優電壓矢量減小轉矩脈動。文獻[7]設計了根據定子磁鏈在兩相坐標系上的分量設計了一種改進磁鏈位置判斷方法的六區段DTC 調速系統,定子磁鏈觀測和扇區判斷直接影響電壓空間矢量的有效選擇,可簡化算法,縮短控制周期。
本文以三相異步電動機為研究對象,直接采取定子磁鏈在兩相坐標系下的投影設計了十二扇區位置判斷策略,與六扇區的直接轉矩控制進行仿真對比。
1 異步電機直接轉矩控制策略
異步電動機直接轉矩控制的原理框圖如圖1所示。3/2坐標變換為clark變換,詳見式(1)和式(2)。通過定子α-β坐標系下的定子電壓(u sα和usa)和定子電流(i sα和isa),通過式(3)、式(4)和式(5),可計算得到定子磁鏈在α-β坐標下的分量ψsα和ψsa及電磁轉矩Te。實際轉速n與期望轉速? 比較后在速度調節器作用下即可獲取電磁轉矩期望值Te*;磁鏈調節器和轉矩調節器均采用施密特滯環控制器,分別獲取磁鏈開關信號Qψ和轉矩開關信號QT。根據定子磁鏈觀測,確定磁鏈的扇區,最后選擇正確的電壓開關信號,從而達到直接控制轉矩的目的。6個開關元件可以實現八種不同的開關組合形式。
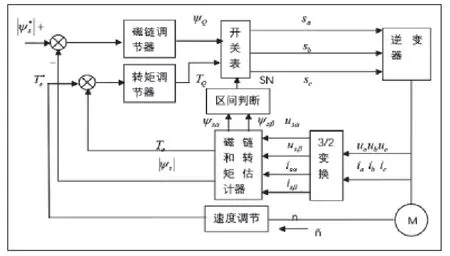
圖1 直接轉矩控制原理框圖
2 六扇區直接轉矩控制
傳統直接轉矩控制一般是將定子磁鏈劃分為6個扇區(如圖2所示),傳統磁鏈位置判斷是通過定子磁鏈的幅值和角度來獲取磁鏈位置,算法復雜,降低了控制器的性能。本實驗首先通過電壓模型法檢測出定子三相電流,再根據α-β靜止兩相坐標系上的分量設計六扇區判斷策略電磁轉矩主要隨磁通角的變化而變化,但實際上,控制過程的每個電壓矢量都會影響定子磁通量的開關幅度和磁通角的大小。電壓矢量會對磁鏈幅值以及磁通角引起的作用和影響,磁鏈控制的實現,是以應用兩點式滯環調節器為基礎的,轉矩控制的實現,是以應用三點式滯環調節器為基礎的。
圖2
3 改進的十二扇區直接轉矩控制
電磁轉矩的變化主要是由于變化迅速快的起作用。 因此,在給定的時間間隔中,所選取的電壓變量無法同時符合這兩項前提,而使電磁轉矩像預計那樣改變。所以,通常直接轉矩控制的六扇區磁鏈在部分狀況下是不怎么精確的。因此,為了有效地抑制轉矩脈動和電流脈動,本文將采用十二扇區來實現,定子磁鏈十二區間劃分為如圖2(b)所示的每個區間為30°的扇形區域。為了簡化計算,提高執行結構的控制效率,本文提出一種改進的十二扇區位置判斷表,如表1所示。
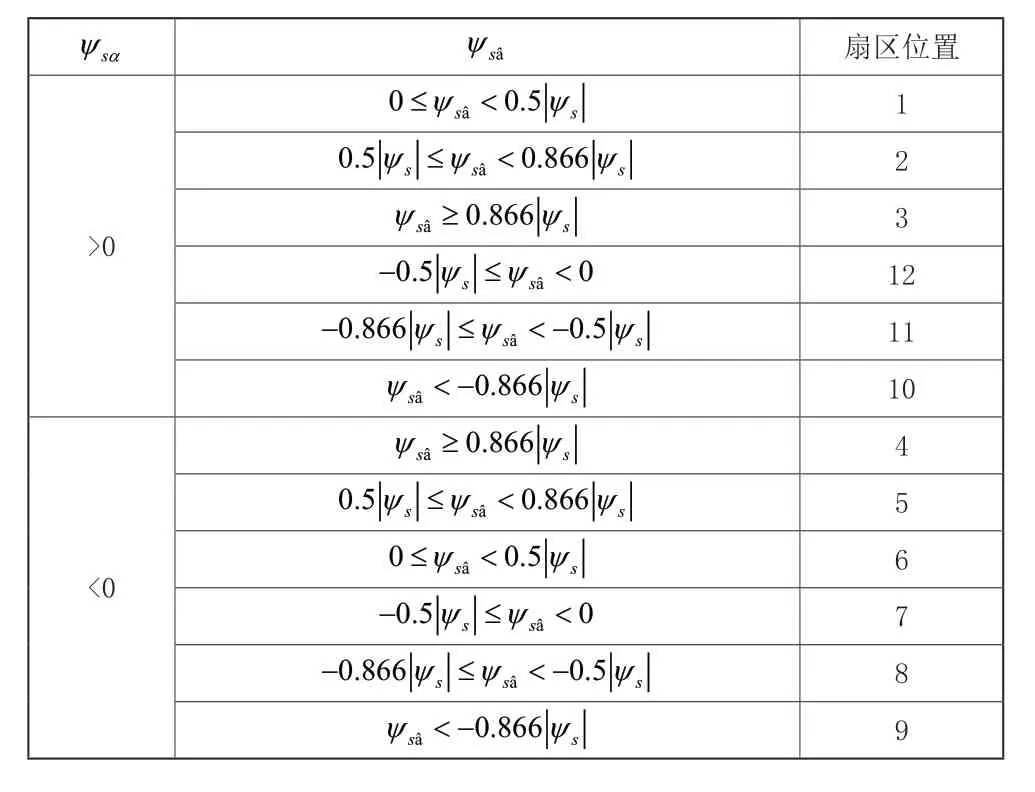
表1 改進的十二扇區位置判斷表
在不同的扇區,應選擇對應的電壓空間矢量,即表2中十二扇區對應的電壓矢量,確保磁鏈幅值和轉矩的正確變化趨勢。
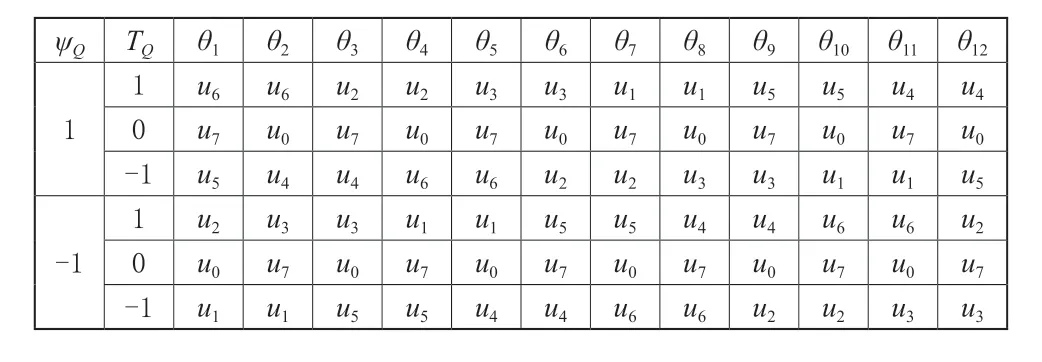
表2 十二扇區電壓矢量表
4 仿真結果
該實驗基于MATLAB R2018b/Simulink 平臺,對傳統直接轉矩控制和改進的十二扇區位置判斷方法的直接轉矩控制進行了仿真建。三相異步電機的仿真參數見表3。

表3 三相異步電機的仿真參數
算法用固定步長的ode3 三階龍格-庫塔法,給定磁鏈幅值1.2Wb,采樣時間設為1sμ,給定期望轉速1000rad/s,給定負載啟動時為30N.m,仿真時間為1s,在相同的環境和參數設置下,得到圖3(a)~圖7(b)所示的波形。
圖3
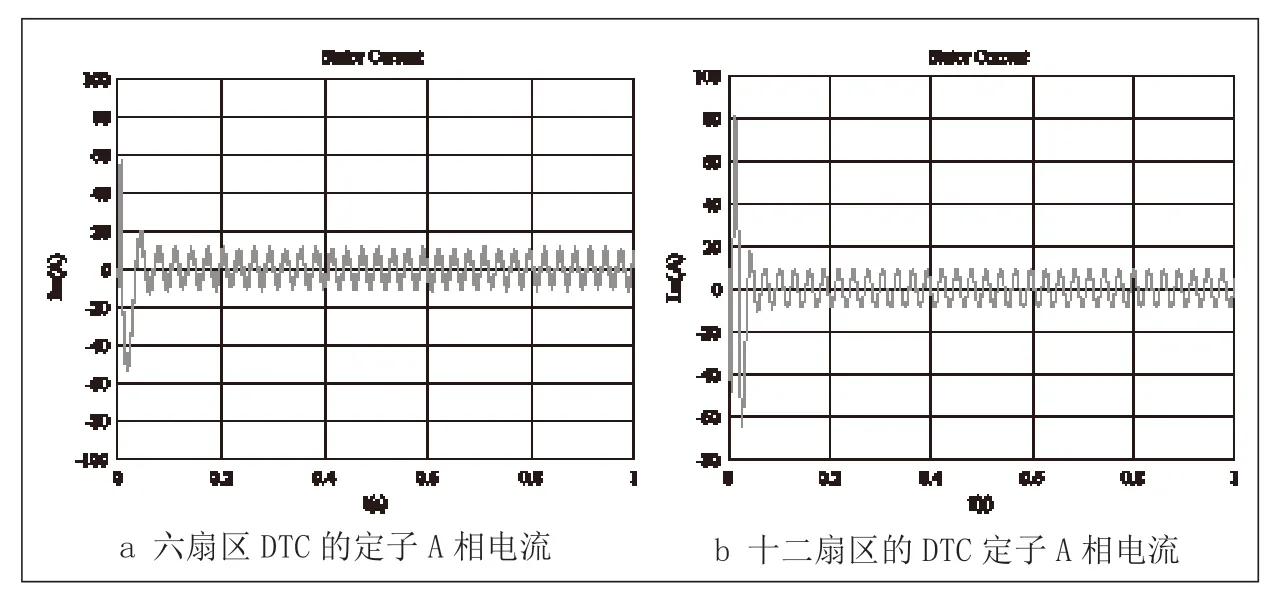
圖4
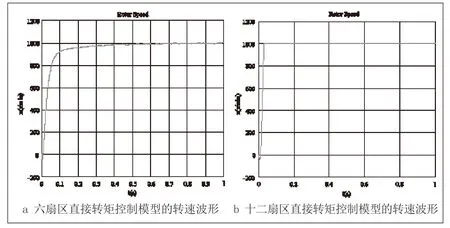
圖6
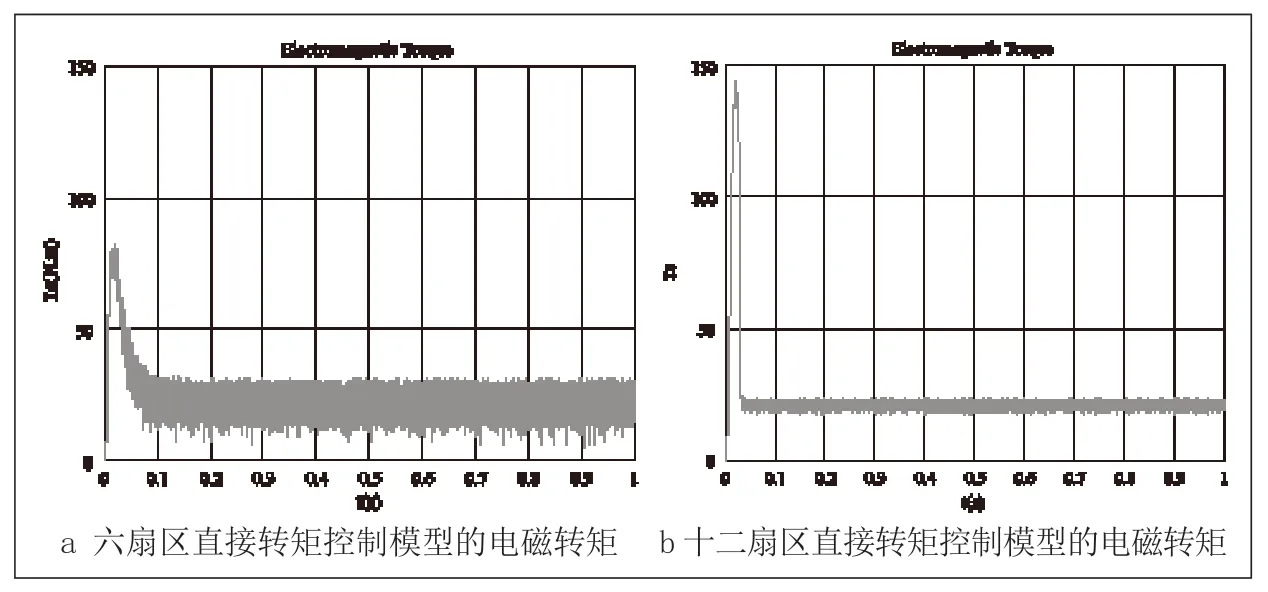
圖7
圖3(a)和圖3(b)分別為六扇區和十二扇區的DTC 近似圓形的磁鏈波形,通過比較可以明顯看出,十二扇區的磁鏈波形毛刺更少更光滑,更接近于圓形。
圖4(a)和圖4(b)分別為六扇區和十二扇區的DTC 定子A 相電流波形,可以直觀地看出十二扇區DTC的定子電流的毛刺更小,可以定性的分析得出結論:十二扇區DTC的定子電流諧波含量與幅值畸變較小。
圖5(a)和圖5(b)分別為六扇區和十二扇區的DTC 定子相電流FFT 分析。六扇區DTC 總諧波畸變率THD 為33.43%,而十二扇區DTC 總諧波畸變率THD 為13.14%,通過定量計算驗證了“十二扇區DTC的定子電流諧波含量與幅值畸變較小”這一結論。
圖6(a)和圖6(b)分別為六扇區和十二扇區的轉速波形,六扇區DTC 在電機啟動0.35s 左右達到期望轉速值,而十二扇區DTC 在電機啟動0.03s 左右即可到達期望轉速值,說明十二扇區的DTC的速度響應更快。
圖7(a)和圖7(b)分別為六扇區和十二扇區的電磁轉矩,十二扇區的DTC的電磁轉矩能夠快速地響應速度變化,在啟動時可提供更大的啟動轉矩,并且電磁脈動明顯減小。
5 結束語
本文以三相異步電機為研究對象,提出一種改進的十二扇區的磁鏈位置判斷方法的直接轉矩控制,通過與六扇區的直接轉矩控制仿真結果對比,改進磁鏈方法的十二扇區DTC 策略不僅減小了計算量,改進方法可緩解磁鏈和電磁轉矩脈動,提高系統的動態響應性能,且把定子電流總諧波畸變率THD 從33.43%降至13.14%。