汽車駕駛模擬器人機交互控制系統優化設計
2023-06-11 08:07:50鄭玲玲郭學立羅蘭
時代汽車 2023年10期
關鍵詞:優化
鄭玲玲 郭學立 羅蘭

摘 要:吉林大學汽車工程學院汽車仿真與控制國家重點實驗室建設了開發型駕駛模擬器系統人機交互能力不足,本文開展了人機交互控制系統優化研究,采用鍵盤硬件控制方式,利用模塊化設計思路,利用嵌入式工控機平臺,搭建任務及指令執行器系統,并建立相應的功能模塊,包括鍵盤、人機界面、主控單元、功能數據庫等。解決了多平臺并發仿真中存在的數據通信、時鐘同步、仿真監控問題,優化了集成平臺的性能。
關鍵詞:駕駛模擬器 人機交互控制 優化
吉林大學汽車工程學院汽車仿真與控制國家重點實驗室建設了開發型駕駛模擬器系統,該系統結構復雜、命令繁多,主要由動力學系統、聲響系統、圖像系統、運動控制系統、數據記錄系統、交通仿真系統及監控系統等子系統組成,能夠為駕駛員提供真實的人-車操作界面,并在模擬器上復現試驗工況,另外它還支持任意嵌入實物的試驗,為駕駛模擬器開發嵌入式系統提供了基礎。模擬器通過嵌入式開發平臺實現了嵌入式臺架與駕駛模擬器的數據集成。搭建了制動嵌入式模型,實現了嵌入式臺架傳感、執行機構的標定與建模。解決了多平臺并發仿真中存在的數據通信、時鐘同步、仿真監控問題,優化了集成平臺的性能。
目前的模擬器系統人機交互能力不足,模擬器系統的配置、集成及各個子系統控制主要是在監控系統中手工輸入命令字串的方式進行,例如在切換車輛場景時,需要在嵌入式軟件中人工鍵入二十余條代碼,這樣既浪費時間,又容易出現鍵入錯誤,同時對操作人員的要求過高,不適合于設備交付客戶使用,更難進行后期二次開發。
針對上述問題,本文開展了人機交互控制系統優化研究,采用鍵盤硬件控制方式,利用模塊化設計思路,保證各模塊可單獨使用,并用于課外實驗、大創項目中,腳本數據庫根據實際操作平臺進行設計,可以保證科研人員進行快速二次開發,提高模擬器系統的綜合設計能力。
1 系統整體結構設計
針對模擬器的整體需求,本文完成的功能結構圖如圖1所示。利用工控機平臺,搭建任務及指令執行器系統,并建立相應的功能模塊,包括鍵盤、人機界面、主控單元、功能數據庫等。本文基于UniButton工控機嵌入式平臺,實現人機交互模塊與數據庫的連接,并將對應的指令命令送入到模擬器中。數據庫利用工控機編寫,內容包含車輛行駛過程中的環境、動力等多參數變量的數據庫,根據實現的功能不同分為以下三個方面:運動數據庫、仿真數據庫以及情景數據庫。利用RS232、CAN總線方式將指令傳輸至PLC控制器和駕駛模擬器端,利用InterNet總線將指令送至運動平臺及其它輔助部件,并將設備的運行狀態參數返回任務指令端進行分析。
根據系統的總體設計,完成了外接鍵盤設計、任務指令執行器研發及功能數據庫編寫等內容。工控機平臺即嵌入式控制單元,用于建立指令按鍵與指令對象的對應關系;并根據指令按鍵的觸發查找與指令按鍵具有對應關系的指令對象,建立指令對象集,將采集當前車輛的各項參數與指令對象集對比,并根據指令對象集修改采集的當前車輛的各項參數形成執行命令;根據該執行命令控制汽車駕駛模擬器進行模擬。
2 多參數數據庫的構建
根據實際需求,首先開發了多參數的指令數據庫,數據庫包括運動數據庫、仿真數據庫以及情景數據庫,所述運動數據庫中包括的指令對象集:車輛總體控制、車輛運動控制、車輛運動過程控制、車輛動力學控制、模擬器聲響系統控制、路面交通系統控制、模擬器視景系統控制、模擬器座艙的感應控制、投影系統的控制以及燈光系統的控制;所述仿真數據庫中包括的指令對象集:模型調整控制、模擬器車型調整控制、天氣情況的控制、時刻控制、嵌入式模式、車輛行駛記錄控制以及車輛參數曲線;情景數據庫包括的指令對象集:駕駛員視點情況控制、試驗場情況控制、智能控制以及引導車控制。
3 鍵盤端設計研發
根據模擬器需要實現的功能,設計三個人機交互控制模塊,分別對應模擬器狀態操作、車輛行駛環境變化操作和車輛行駛路況操作,每個按鍵的尺寸為15mm×21mm×3mm,分別對應數據庫中的一個功能,鍵盤與工控機嵌入式控制單元的通訊方式為RS232模式,并通過USB供電。實體鍵盤通過工控機平臺啟動指令配置模塊將按鍵模板中的按鍵與指令對象建立或修改對應關系,鍵盤模塊包括按照行排列的功能按鍵,每個功能按鍵下方設置對應該功能按鍵的多個指令按鍵,所述交互模塊與所述功能數據庫建立一對一的對應關系,所述功能按鍵與所在的交互模塊對應功能數據庫功能指令集建立對應關系,當功能按鍵被觸發時,工控機嵌入式控制單元通過判斷對應關系,指向對應的功能數據庫;當指令按鍵被觸發時,工控機嵌入式控制單元通過判斷對應關系,直接從指向的功能數據庫調取相應的指令。人機交互系統還包括有指令配置模塊,通過所述指令配置模塊對指令對象進行修改以及建立新的指令對應,所述修改包括指令對象以及功能數據庫與對應功能按鍵的關系變更以及新加入的指令與指令按鍵建立對應關系。
運行鍵盤實物如圖2所示。主要實現以下功能的操作:
1)車輛總體控制。完成模擬車輛的暫停、停止、運行和復位功能。
2)車輛運動控制。駕駛艙底部位置、駕駛員登艙位置、駕駛艙中立位置和駕駛艙復位功能。
3)車輛運動過程控制。駕駛員的體感模擬方式、退出體感模式、測試開始和測試停止。
4)車輛動力學控制。動力學模式開始運行、暫停、停止和復位。
5)模擬器聲響系統控制。聲響系統開啟、停止、音量加大和音量減小。
6)路面交通系統控制。交通系統的暫停、繼續工作、停止工作和重置。
7)模擬器視景系統控制。調整視景的高速、山區、小鎮和試驗場景模式。
8)模擬器座艙的感應控制。座艙力學感應的模擬、關閉、停止和復位。
9)投影系統的控制。投影系統的打開、關閉、上電和下電。
10)燈光系統的控制。模擬環境門廳燈光開啟關閉和座艙內的燈光開啟關閉。
仿真鍵盤實物圖如圖3所示,主要對工作過程中的仿真環境進行控制,主要實現以下功能的操作:
1)模型調整控制。完成動力學模型的切換,包括ASCL、A、B、C。
2)模擬器車型調整控制。包括H2、A、B、C車型。
3)天氣情況的控制。包括晴天、陰天、霧天、多云、小雨、大雨、小雪和大雪8種天氣情況。
4)時刻控制。包括清晨、中午、傍晚和午夜四個時間點。
5)嵌入式模式。包括聯合仿真、退出仿真、停止和復位。
6)車輛行駛記錄控制。包括開始、停止、入門和出門。
7)車輛主要參數曲線。包括車體狀態、懸架狀態、發動機狀態、變速箱狀態、駕駛信號、輪缸壓力、輪胎側偏、輪胎滑移及四個輪胎的受力曲線。
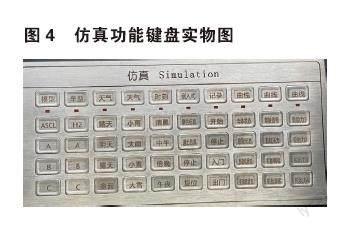
情景鍵盤實物圖如圖4所示,主要對工作過程中的情景參數進行控制,主要實現以下功能的操作:
1)駕駛員視點情況控制。包括視點的前移、后移、左移、右移、上移、下移、側傾程度增加減小、俯仰程度增加減小、橫擺程度增加減小等。
2)試驗場情況控制。包括雙移線情況下不同車速度控制、蛇形路段車速控制、緊急避障的車速控制、直線路段的車速控制、雙扭線區和圓周區的車速控制。
3)智能控制。車輛的縱向、側向控制,車道保持情況及偏離預警。
4)引導車控制。引導車停止、勻速、變道等。
按鍵模板通過工控機嵌入式控制單元啟動指令配置模塊將按鍵模板中的按鍵與指令對象建立或修改對應關系。鍵盤包括三個實體的交互模塊,交互模塊包括按照行排列的功能按鍵,每個功能按鍵下方設置對應該功能按鍵的多個指令按鍵,功能按鍵與指令按鍵具有一定的間距,交互模塊與功能數據庫建立一對一的對應關系,三個功能數據庫分別對應三個交互模塊,功能按鍵與所在的交互模塊對應功能數據庫下的功能指令集建立對應關系,當功能按鍵被觸發時,工控機嵌入式控制單元通過判斷對應關系,指向對應的功能數據庫;當指令按鍵被觸發時,工控機嵌入式控制單元通過判斷對應關系,直接從指向的功能數據庫調取相應的指令。每個交互模塊具有總按鍵,當總按鍵觸發時,工控機嵌入式控制單元通過判斷對應關系指向所在的功能數據庫。三個交互模塊只能單獨啟用,當超過兩個總按鍵被按下時,選擇后觸發的總按鍵對應的交互模塊。
人機交互系統還包括有指令配置模塊,通過指令配置模塊對指令對象進行修改以及建立新的指令對應,修改包括指令對象以及功能數據庫與對應功能按鍵的關系變更以及新加入的指令與指令按鍵建立對應關系。從而實現修改與擴展,用于適應不同的操作需求。
按鍵模板具有擴展功能,通過所述指令配置模塊建立新的指令對象,并通過嵌入式控制單元將其放入對應的功能數據庫,以及通過嵌入式控制單元查找功能數據庫對應的功能按鍵下空余的指令按鍵,按照從上到下的排列順序將新的指令對象與空余的指令按鍵建立對應關系,若新建立的指令對象所對應的指令對象集所在的功能數據庫對應的功能按鍵中指令按鍵已滿,則擴展功能按鍵,若功能按鍵無法擴展,則發出警告提醒。
4 人機交互界面設計搭建
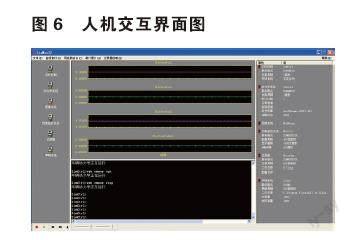
利用工控機嵌入式計算機系統,在控制平臺搭建了人機交互界面,實現主控單元對任務指令器的命令控制及狀態顯示。人機交互界面圖如下圖所示。主要包括對實時、動力學系統、圖像、仿真監控、記錄器和聲響系統的監控等,并對重要參數可以在界面中進行實時顯示。
基金項目:吉林大學實驗技術項目(汽車駕駛模擬器人機交互控制系統優化,SYXM2021b053)。
參考文獻:
[1]袁瑞晨,孫濤.基于虛擬駕駛的仿真平臺設計[J].工業控制計算機,2019,32(06):57-60.
[2]陳彥廷. 虛擬駕考系統設計[D].內蒙古大學,2018.
[3]李鵬,湯勇,羊玢.一種開展汽車性能試驗教學的新平臺[J].教育教學論壇,2017(26):243-244.
[4]謝嘉悅,張舒.智能化汽車主動安全人機交互界面評價方法的設計理念研究[J].質量與標準化,2016(07):53-56.
[5]李霖,朱西產,孫東.基于視覺信號提示的碰撞預警系統的人機交互界面[J].汽車安全與節能學報,2015,6(01):37-42.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
