
基于PCA-GRU的輕型汽油車NOx排放預測
2023-06-11 08:07:50王瓏迪何超
時代汽車 2023年10期
王瓏迪 何超

摘 要:為建立一種輕型汽油車NOx排放預測模型,在昆明市內采用便攜式車載排放測試系統(Portable Emission Measurement System,PEMS)對一輛輕型汽油車進行實際行駛污染物排放(Real Drive Emission,RDE)測試;利用主成分分析算法(Principal Component Analysis,PCA)對影響輕型汽油車排放的特征參數進行降維,將降維后的數據作為門控循環單元神經網絡(Gated Recurrent Unit,GRU)的輸入,建立基于PCA-GRU的排放預測模型,對輕型汽油車的NOx的排放量進行瞬時預測。結果表明,PCA-GRU模型對NOx的預測結果的平均絕對誤差為0.133mg/s,絕對系數為0.88,相比于單一的GRU模型,分別提高了42.4%和8.6%。該排放預測模型可以實現對輕型汽油車NOx排放較準確的預測,具有一定的工程價值。
關鍵詞:便攜式車載排放測試系統 RDE測試 主成分分析 門控循環單元神經網絡 排放預測模型
1 引言
隨著機動車保有量的不斷增加,機動車成為污染物排放的主要貢獻者[1],控制機動車污染物排放成為改善人類居住環境的關鍵。建立排放預測模型可以有效監測機動車污染物排放量,為環保部門制定減排措施提供參考依據。隨著機器學習的發展,神經網絡被廣泛應用于機動車排放預測領域,戴金池等在[2]AVL部分流稀釋采樣發動機臺架上進行歐洲瞬態循環試驗(ETC)和歐洲穩態循環試驗(ESC),將處理時間序列問題的LSTM神經網絡用于柴油機NOx的預測,結果顯示,相對于其他模型,LSTM模型在柴油機NOx排放預測方面具有更好的預測能力,具有更高的準確性和更強的泛化性能。Liu等[3]提出了一種基于主成分分析(PCA)和遺傳算法(GA)的支持向量機的集成方法,建立了柴油機NOx瞬態排放預測模型,在穩態的運行條件下,該模型對訓練集和測試集表現出了較高的準確率,并且與單個SVM模型和傳統ANN模型相比,所提出的最優SVM集成模型在預測精度和泛化能力方面表現更優秀。但上述研究是以臺架試驗數據建立的模型,只能反映試驗車輛在特定工況下的排放水平,與機動車在實際道路行駛的排放差別較大。基于此,本研究采用便攜式車載排放測試系統對一輛輕型汽油車進行實際行駛污染物排放測試(RDE測試),利用測得的數據建立基于PCA-GRU的輕型汽油車排放預測模型,實現對輕型汽油車實際道路NOx排放的準確預測。
2 方法論
2.1 主成分分析
主成分分析(Principal Component Analysis,PCA)是一種使用廣泛的數據降維算法[4],由于高維數據包含許多冗余的信息,這些信息會影響數據處理和模型構建的效率和準確性,主成分分析可以將n維特征通過線性變化映射到k維上,得到新的k維特征,使得新的k維特征之間的相關性最小化,具體步驟為:
1)對所有樣本進行標準化,使每個特征具有相同的重要性,標準化公式為:
式中,為標準化后的數據,為初始數據,為初始數據的平均值,為初始數據的標準差。
2)之后構造協方差矩陣,計算協方差矩陣的特征值和特征向量,最后通過計算累計貢獻率選取前k個主成分,達到特征降維的目的。
2.2 門控循環單元神經網絡
門控循環單元神經網絡(Gated Recurrent Unit,GRU)是一種基于LSTM神經網絡的變體[5],LSTM解決了循環神經網絡RNN中梯度消失和梯度爆炸的問題,與LSTM比較,GRU保持了LSTM的性能,并且只有更新門和重置門,更新門用于控制上一時刻信息保存到當前時刻的量,重置門用于決定當前時刻信息如何與上一時刻信息結合,GRU結構得到優化,訓練速度提升。因此能有效處理時間序列問題。圖1為GRU網絡原理圖。
2.3 PCA-GRU模型
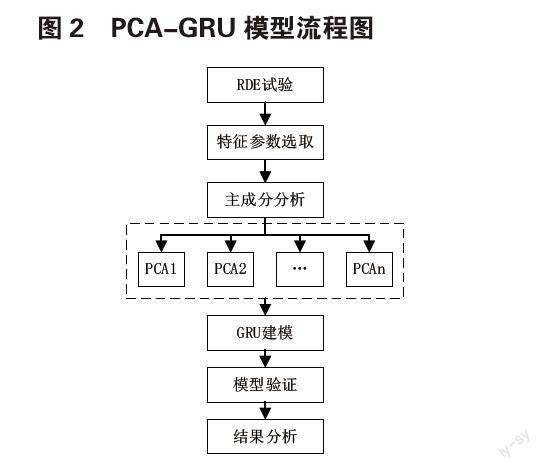
排放預測模型的輸入過多,會導致模型響應時間變長,預測精度降低,因此利用主成分分析進行降維,建立基于PCA-GRU的輕型汽油車NOX排放預測模型。流程圖如圖2所示,具體步驟如下:
1)采用便攜式車載測試排放系統PEMS對一輛輕型汽油車進行RDE試驗,采集試驗過程中車輛污染物濃度和車輛信息;
2)選取影響輕型汽油車排放的特征參數,利用主成分分析進行降維;
3)將降維后的數據作為GRU神經網絡的輸入,得到輕型汽油車NOx的排放預測結果。
3 試驗結果與分析
3.1 RDE試驗
RDE試驗是指實際行駛污染物排放(Real Drive Emission,RDE)測試,我國在制定國Ⅵ排放標準時從歐Ⅵ標準引入,RDE試驗作為車輛類型認證的必要條件之一,要求新車型必須滿足RDE試驗的排放要求,以更準確地評估車輛尾氣排放情況,加強車輛排放監管和保護環境。隨著中國環保法規的不斷升級,RDE試驗在中國的推廣應用將越來越廣泛。
選擇一輛國Ⅴ輕型汽油車作為RDE試驗測試車輛,車輛主要技術參數見表1。
便攜式車載排放測試系統(Portable Emission Measurement System,PEMS)包括:
1)SEMTECH-ECOSTAR車載氣體排放測量系統:用于檢測試驗車輛行駛時的污染物排放濃度和排放速率;
2)電子流量計:用于記錄車輛排氣質量流量;
3)GPS定位系統:用于確定試驗車輛位置和海拔高度等;
4)OBD車載診斷系統:用于采集車輛行駛時的車速、發動機轉速、燃油率、負荷百分比等參數。
將PEMS安裝到測試車輛上,根據《輕型汽車污染物排放限制及測量方法(中國第六階段)》規劃實驗道路,測試車輛按市區-市郊-高速的順序在昆明市實際道路上行駛,三種行駛里程占比分別為34%、33%、33%,允許誤差在10%以內。試驗持續90~120min,整個試驗過程由PEMS設備記錄污染物濃度和車輛信息等。將采集到的數據分為訓練集、驗證集和測試集,占總樣本比例分別為75%、15%、10%。
3.2 建立PCA-GRU排放預測模型
車速與車輛動力需求和駕駛行為等因素密切相關,對機動車排放水平具有重要的影響;發動機轉速和負荷百分比是決定車速的主要參數;排氣溫度會影響車輛后處理裝置中的催化劑活性,從而影響排放;排氣流量和燃油率也與車輛的排放水平。因此,選取車速、排氣溫度、排氣流量、負荷百分比、發動機轉速、燃油率等6個參數進行標準化。將標準化之后的數據進行主成分分析計算得到協方差矩陣的特征值和每個特征值的方差貢獻率,列于表1,由表1可知,前4個主成分的累計貢獻率為97.478%,可以代表6個參數的大部分信息,因此,選取前4個主成分作為GRU神經網絡的輸入,NOx作為GRU神經網絡的輸出。
主成分特征向量計算結果如下:
式中:F1,F2,F3,F4表示主成分特征向量,Y1,Y2,…,Y6表示標準化處理后的數據。
在機器學習中,超參數的設置很大程度上影響了模型的性能和泛化能力,合理的超參數設置可以使模型在訓練過程中快速收斂,防止過擬合,并提高模型的訓練效率和泛化能力。本文選定的GRU神經網絡超參數為:GRU神經網絡的步長設置為6,批處理大小為45,迭代次數為180次,學習率為0.001,GRU為2層,每層神經元數量均為50。選用平均絕對誤差MAE和絕對系數R2作為排放預測模型評價指標,MAE越小,表明排放預測模型的精度越高;絕對系數R2的取值范圍在0到1之間,當絕對系數R2越接近1時,說明模型對數據的擬合程度越好。公式如下:
式中,為預測模型的預測結果,為實際值。
3.3 試驗結果分析
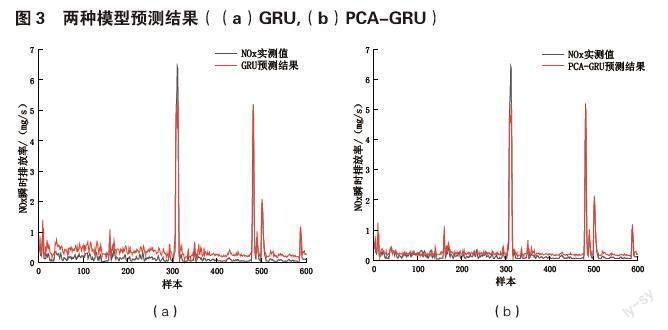
對輕型汽油車NOx的排放預測結果如圖3所示。
由圖可知,GRU單一模型對輕型汽油車NOx瞬時排放率的預測效果不是很理想,存在較大誤差,這是由于未經過主成分分析處理的數據中包含冗余信息和噪聲,這些會對模型的預測結果造成干擾,導致模型的預測精度降低。而PCA-GRU排放預測模型的NOx預測結果與實測值在整體趨勢上一致,將單一GRU模型與PCA-GRU模型的NOx預測結果的平均絕對誤差MAE和絕對系數R2列于表3,相比與GRU模型,PCA-GRU模型的MAE提高了42.4%,絕對系數R2提高了8.6%,表明PCA-GRU排放預測模型不僅能夠更好地提取和保留原始數據中的重要特征信息,還減少了原始數據中的冗余信息和噪聲,從而使模型具有良好的預測性能,可以實現輕型汽油車NOx精度較高的預測。
4 結論
本研究利用便攜式車載排放測試系統對一輛輕型汽油車進行了實際行駛污染物排放測試,根據采集到的試驗數據,分析后確定了與車輛排放相關的車速、排氣溫度、排氣流量、負荷百分比、發動機轉速、燃油率等6個特征參數,通過主成分分析算法對6個參數進行降維處理,得到4個主成分,然后將4個主成分作為GRU神經網絡的輸入建立基于PCA-GRU的排放預測模型,對輕型汽油車NOx進行排放預測。結果表明,所建立的排放預測模型對輕型汽油車NOx排放預測的平均絕對誤差MAE為0.133mg/s,絕對系數R2為0.88,相較于單一GRU模型的0.231mg/s和0.81,預測準確性分別提高了42.4%和8.6%,說明通過主成分分析降維,使得模型對數據的理解更加深入和準確,模型結構更加合理,提高了模型的預測能力。因此,基于PCA-GRU的排放預測模型可以對實際道路中輕型汽油車NOx瞬時排放量實現較精準的預測。
參考文獻:
[1]中國環境保護部.《中國移動源環境管理年報(2021)》發布[J]. 中國能源,2021,42(8):1.
[2]戴金池,龐海龍,俞妍,等. 基于LSTM神經網絡的柴油機NOx排放預測[J]. 內燃機學報,2020,38(5):457-463.
[3]Liu B,Hu J,Yan F W,et al. A novel optimal support vector machine ensemble model for NOx emissions prediction of a diesel engine[J]. Measurement,2016,92:183-192.
[4]XIA W,SONG T,YAN Z. A method for recognition of mixed gas composition based on PCA and KNN[C].Proceedings of the 19th International Conference on Optical Communications and Networks.2021:1-3.
[5]KYUNGHYUN CHO,BART VAN MERRIEENBOER,CAGLAR GULCEHRE,et al. Learning Phrase Representations using RNN Encoder-Decoder for Statistical Machine Translation[C]. //Conference on empirical methods in natural language processing, vol. 3: Conference on empirical methods in natural language processing (EMNLP 2014), 25-29 October 2014, Doha, Qatar.:Association for Computational Linguistics, 2014:1724-1734.
