基于PID的四旋翼飛行器控制系統研究
2023-06-21 09:28:16黃奕陳璟汝徐琳
現代信息科技 2023年9期
關鍵詞:無人機
黃奕 陳璟汝 徐琳

摘? 要:材料、動力、計算機技術的快速發展帶動了無人機產業的進步。無人機按照旋翼數量可分為三旋翼飛行器、四旋翼飛行器、六旋翼飛行器以及八旋翼飛行器等,其中四旋翼飛行器結構簡單功能多樣,綜合性能較強,在諸多領域得到廣泛應用。在了解國內外四旋翼飛行器研究現狀和主要控制方法及原理后,基于PID控制原理設計了四旋翼飛行器控制系統,通過數學建模和仿真實驗驗證了PID控制系統的穩定性。
關鍵詞:無人機;四旋翼飛行器;PID控制算法
中圖分類號:TP273? 文獻標識碼:A? 文章編號:2096-4706(2023)09-0078-04
Abstract: The rapid development of materials, power, and computer technology has driven the progress of the UAV industry. According to the number of rotors, UAVs can be divided into three rotor aircraft, quadrotor aircraft, six rotor aircraft and eight rotor aircraft. Among them, quadrotor aircraft has simple structure, diverse functions and strong comprehensive performance, and is widely used in many fields. After understanding the research status, main control methods and principles of quadrotor aircraft at home and abroad, the quadrotor aircraft control system is designed based on PID control principle, and the stability of the PID control system is verified through mathematical modeling and simulation experiments.
Keywords: UVA; quadrotor aircraft; PID control algorithm
0? 引? 言
四旋翼飛行器發展至今已有一百多年的歷史,是一種可遙控、有四個旋翼支持飛行的無人飛行動力裝置[1]。相較于國外,國內在四旋翼飛行器方面的研究起步較晚,但因為其巨大的潛在價值和發展前景,引起了很多研究人員的關注,成為現在乃至將來的熱門研究方向。如今國內四旋翼飛行器控制領域的也在飛速發展,許多高校都加入到了飛行器控制領域的研究行列中。
四旋翼飛行器按照飛行器體積大小和控制方式可分為微型四旋翼飛行器,如蘇黎世聯邦理工大學的飛行器;小型四旋翼飛行器如賓西尼亞大學設計的HXM-4飛行器;遙控四旋翼飛行器如Draganflyer公司設計的DraganflyerⅢ飛行器[2]。
隨著科技的發展,四旋翼飛行器的相關技術也越來越成熟,相比于固定翼飛行器,四旋翼飛行器不受地理因素限制,由于其體積小靈活度高,室內室外都能飛行、隱蔽性好以及垂直起降等特點,如今在軍事和民用等許多領域有廣泛應用,如軍事方面參與偵察拍攝、目標搜索和打擊[3],民用的農業方面參與噴灑農藥和播種,消防方面參與火情監測、傳遞火情信息,氣象方面進行氣象監測預報氣象情況,等等。
四旋翼飛行器因其強耦合,即每個模塊之間都存在緊密的聯系,一個模塊的變化會引起其他模塊跟著變化的特點;欠驅動,即控制輸入量少于自由度數的特點以及非線性的特點,是非常復雜的控制系統,因此設計出兼備良好安全性和穩定性的四旋翼飛行器控制系統,保障四旋翼飛行器飛行時處于的安全和穩定的狀態十分具有難度和挑戰。
目前已有許多用于設計飛行器控制系統的方法,例如比例-積分-微分控制算法(PID)、基于優先級的調度控制算法(PD)、線性二次型控制算法(LQR)、反步控制法、滑模變結構控制法等,這些方法能很好地幫助飛行器實現位置、姿態控制、懸停等功能,這些方法中PID和PD控制法最經典,是應用在四旋翼飛行器中的主要方法。本文主要討論PID控制算法,由于一般的PID控制算法對非線性系統控制效果較差,所以通常會對PID進行改進,如文獻[4]設計了可抑制高頻干擾的微分PID控制器,如文獻[5]提出了基于反步法設計了有良好控制性能的PID非線性控制器,有如文獻[6]設計了可在室內外對目標進行跟蹤的模糊PID控制器。
飛行器通過旋翼控制飛行,當四個旋翼轉速相同且升力和等于重力時飛行器飛行狀態保持不變,旋翼轉速增大或減小時飛行器可實現上升和下降,當同轉向的兩個旋翼速度低于另外兩個轉速反向旋翼轉速時,四旋翼飛行器會按照轉速較高的兩旋翼轉向旋轉從而實現偏航運動,當相鄰兩旋翼轉速高于另外兩相鄰旋翼轉速時則可實現俯仰運動和滾轉運動[7]。
文獻[8]建立了飛行器數學模型,設計并驗證了控制算法。本文在飛行原理上建立了飛行器動力模型,設計了相關算法并通過驗證得到了相關結論。
1? 四旋翼飛行器數學模型的建立
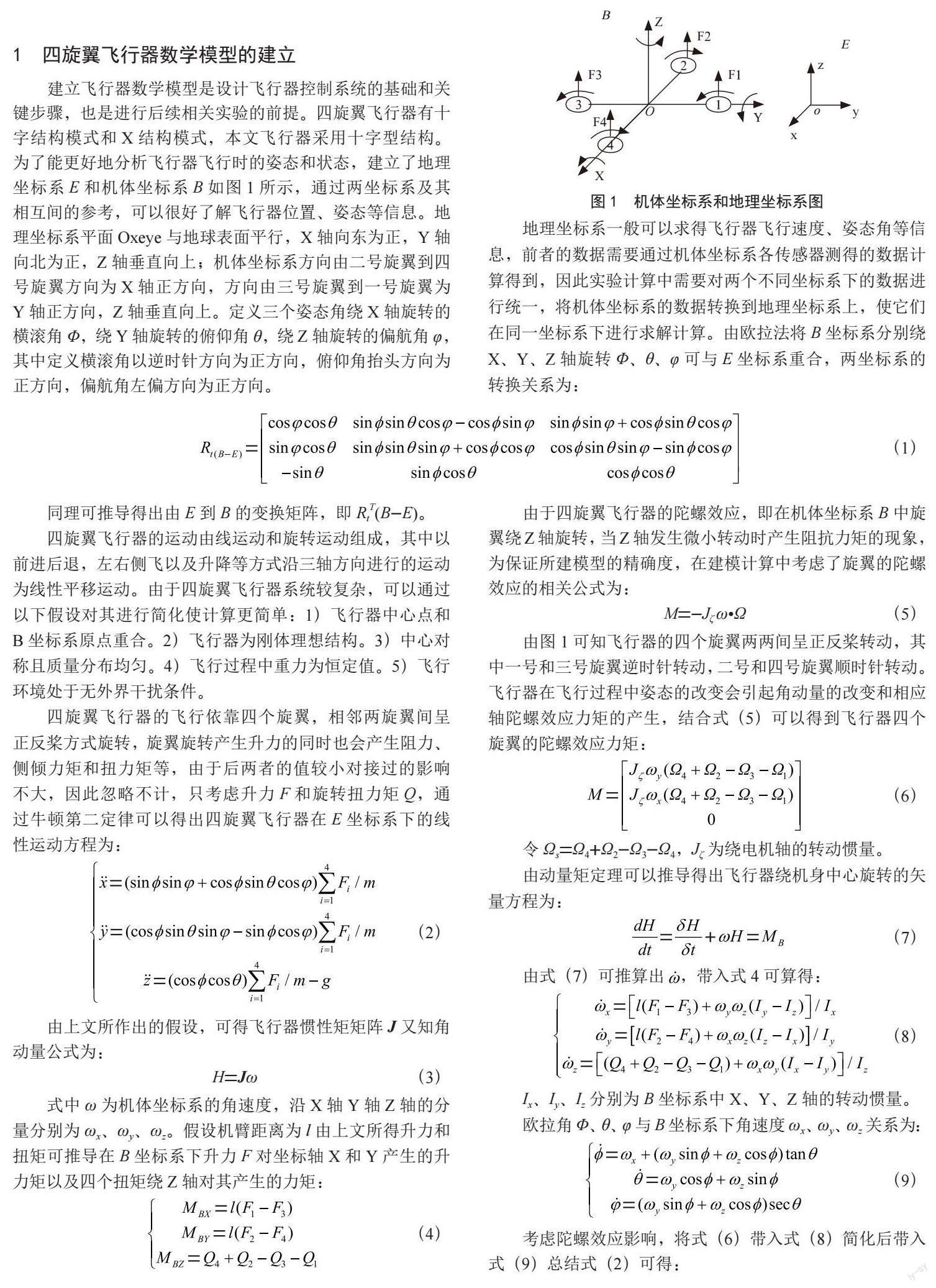
建立飛行器數學模型是設計飛行器控制系統的基礎和關鍵步驟,也是進行后續相關實驗的前提。四旋翼飛行器有十字結構模式和X結構模式,本文飛行器采用十字型結構。為了能更好地分析飛行器飛行時的姿態和狀態,建立了地理坐標系E和機體坐標系B如圖1所示,通過兩坐標系及其相互間的參考,可以很好了解飛行器位置、姿態等信息。地理坐標系平面Oxeye與地球表面平行,X軸向東為正,Y軸向北為正,Z軸垂直向上;機體坐標系方向由二號旋翼到四號旋翼方向為X軸正方向,方向由三號旋翼到一號旋翼為Y軸正方向,Z軸垂直向上。定義三個姿態角繞X軸旋轉的橫滾角Φ,繞Y軸旋轉的俯仰角θ,繞Z軸旋轉的偏航角φ,其中定義橫滾角以逆時針方向為正方向,俯仰角抬頭方向為正方向,偏航角左偏方向為正方向。
地理坐標系一般可以求得飛行器飛行速度、姿態角等信息,前者的數據需要通過機體坐標系各傳感器測得的數據計算得到,因此實驗計算中需要對兩個不同坐標系下的數據進行統一,將機體坐標系的數據轉換到地理坐標系上,使它們在同一坐標系下進行求解計算。由歐拉法將B坐標系分別繞X、Y、Z軸旋轉Φ、θ、φ可與E坐標系重合,兩坐標系的轉換關系為:
同理可推導得出由E到B的變換矩陣,即RtT(B-E)。
四旋翼飛行器的運動由線運動和旋轉運動組成,其中以前進后退,左右側飛以及升降等方式沿三軸方向進行的運動為線性平移運動。由于四旋翼飛行器系統較復雜,可以通過以下假設對其進行簡化使計算更簡單:1)飛行器中心點和B坐標系原點重合。2)飛行器為剛體理想結構。3)中心對稱且質量分布均勻。4)飛行過程中重力為恒定值。5)飛行環境處于無外界干擾條件。
四旋翼飛行器的飛行依靠四個旋翼,相鄰兩旋翼間呈正反槳方式旋轉,旋翼旋轉產生升力的同時也會產生阻力、側傾力矩和扭力矩等,由于后兩者的值較小對接過的影響不大,因此忽略不計,只考慮升力F和旋轉扭力矩Q,通過牛頓第二定律可以得出四旋翼飛行器在E坐標系下的線性運動方程為:
2? PID算法和原理
PID算法可以設計出有良好控制能力的控制器,使四旋翼飛行器的平衡等性能更好[8]。四旋翼飛行器飛行過程中,可通過飛行器上的陀螺儀、加速器等測得飛行器的飛行數據[9],這些數據經過一系列計算就可以得到飛行器飛行姿態位置等具體信息,結合這些信息可以向PID控制器輸入某些信號,再由控制器將信號輸出到特定的控制對象上,進而達到控制旋翼飛行器飛行狀態的目的,例如PID控制系統可以將輸出的信號作用與電子調速器來控制飛行器旋翼的轉速等。
作為一種線性控制方法,PID控制由P(比例)、I(積分)、D(微分)三個環節組成,了解三個環節在控制系統中的作用以及三個環節各自調整系數的變化對控制系統的影響效果可以便于我們找到最佳的控制系數使系統有更好的穩定性和抗干擾能力。首先給出PID的控制圖如圖2所示,圖中r (t)為設定值,e (t)為誤差,u (t)為輸出量,y (t)為被控對象實際輸出值。
PID控制系統中比例環節可將誤差成比例的反映出來,當比例系數較小時被控系統調整會比較緩慢,所需要的調整時間較長,這時調整曲線比較平緩但是系統會比較穩定;當比例系數較大時,雖然能夠較快地達到目標值,但是系統容易振蕩,不穩定。
積分環節具有記憶功能,可以用于消除靜差,當積分系數較小時積分作用效果較小,當積分系數較大時積分作用較大但是系統穩定性變差。
微分環節可減弱P達到目標值過程中產生的震蕩,預判誤差的趨勢進而做出調整,是系統的調節更高效,穩定性更好,本文就采用了PID算法來設計四旋翼飛行器的控制系統。
3? 仿真實驗
上文已說明PID控制系統通過調整三個環節相關系數來達到最優狀態,利用軟件MATLAB建模,調整相關系數對系統進行實驗和仿真,可以直觀地看出響應時間、超調量等指標,判斷下系統的狀態,通過對不同模塊的參數多次的調整和仿真,最終可以找到系統處于穩態時的最優參數,得到我們想要的結果。設定實驗初始姿態角(以俯仰、偏航角為例)俯仰角值為-0.3°,偏航角值為-0.2°,在零時刻,向控制系統發出信號進行仿真,仿真時間為八秒,仿真結果如圖3所示。
從圖3所示的曲線可以看出曲線震蕩的幅值較小,在約兩秒之后四旋翼飛行器的俯仰姿態就進入了0°穩定狀態。圖4分析曲線可以看出控制系統較穩定,經過兩秒左右的時間,四旋翼飛行器偏航姿態就進入了穩定狀態。
輸入飛行器相關參數,已知飛行器質量1.2 kg,g=9.8 N/kg當飛行器姿態不變穩定飛行時,每個旋翼的升力如圖5所示。
圖5看出飛行器姿態穩定之后每個旋翼的升力都為四旋翼飛行器重力的四分之一。從三個仿真實驗可以驗證說明PID控制系統有良好的控制能力,對階躍信號的靜態跟蹤能力很好,并且在短時間的調整后就能夠使系統進入穩定狀態,具有較好的穩定性能。
4? 結? 論
本文首先簡單介紹了無人機的分類,并著重無人機中的四旋翼飛行器介紹了其發展情況、應用領域、飛行原理以及飛行器自身的一些特點等。其次本文就四旋翼飛行器控制系統介紹了幾種常用的控制方法,主要講述了其中的PID控制算法。接著本文在建立和推導地理坐標系和機體坐標系及兩者之間轉換關系的基礎上,建立了四旋翼飛行器的數學模型,之后針對PID算法介紹了PID原理圖,根據原理圖分析推導了PID算法的公式并對四旋翼飛行器控制系統進行了基于PID控制算法的設計,最后本文通過MATLAB仿真實驗驗證了PID控制器在四旋翼飛行器姿態控制上的良好控制能力和穩定性。
參考文獻:
[1] 米培良.四旋翼飛行器控制與實現 [D].大連:大連理工大學,2015.
[2] 李文巧.基于自適應PD控制的四旋翼飛行器研究 [D].重慶:重慶大學,2020.
[3] 陳仁朋,吳熠文,余加勇,等.基于無人機影像序列的城市精細化三維模型精度評估 [J].湖南大學學報:自然科學版,2019,46(11):172-180.
[4] 魏波.四旋翼飛行器穩定性控制方法研究 [D].西安:西安科技大學,2019.
[5] MIAN A A. Modeling and Backstepping-based Nonlinear Control Strategy for a 6 DOF Quadrotor Helicopter [J].Chinese Journal of Aeronautics,2008(3):261-268.
[6] RABAH M,ROHAN A,MOHAMED S A S,et al. Autonomous Moving Target-Tracking for a UAV? Quadcopter Based on Fuzzy-PI [J].IEEE Access,2019,7:38407-38419.
[7] 張鐳,李浩.四旋翼飛行器模糊PID姿態控制 [J].計算機仿真,2014,31(8):73-77.
[8] 李俊,李運堂.四旋翼飛行器的動力學建模及PID控制 [J].遼寧工程技術大學學報:自然科學版,2012,31(1):114-117.
[9] 茹巖,張欣.四軸飛行器控制系統設計與實現 [J].電子測試,2022,480(3):42-45+49.
[10] 張心馳.四旋翼飛行器控制系統的研究 [D].南昌:南昌大學,2018.
[11] 劉慧博,彭亮,趙旭.四旋翼飛行器姿態控制方法研究 [J].自動化應用,2020(12):4-7.
[12] 魏波.四旋翼飛行器穩定性控制方法研究 [D].西安:西安科技大學,2019.
[13] 吳森堂,費玉華.飛行控制系統 [M].北京:北京航空航天大學出版社,2005.
[14] 吳中華,賈秋玲.四旋翼幾種控制方法研究 [J].現代電子技術,2013,36(15):88-90+94.
[15] 張洪濤.四旋翼微型飛行器位姿及控制策略的研究 [D].哈爾濱:哈爾濱工業大學,2014.
作者簡介:黃奕(2002—),女,漢族,四川成都人,本科在讀,研究方向:飛行器制造。
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
