一種基于改進布谷鳥算法的極值搜索控制方法及應用*
2023-06-21 05:00:14黃政雨白玉婷
南方農機 2023年13期
黃政雨 , 白玉婷
(1.杭州電子科技大學經濟學院,浙江 杭州 310018;2.黔南民族師范學院計算機與信息學院,貴州 黔南州 558000)
0 引言
化石燃料的減少和環境污染的加劇是當今世界面臨的重要發展問題[1]。太陽能的利用具有成本低、環境友好、零碳排放和自然資源豐富等優點,受到廣大科研人員的青睞[2]。由于不確定的環境影響,太陽能電池功率-電壓(P-V)曲線是非線性的,需要一個最大功率點跟蹤(MPPT)控制器確保在任何環境下太陽能電池都保持最大功率工作[3]。
極值搜索控制方法(ESC)一般針對不確定復雜動力學模型,通過動態調整動力學參數和反饋控制實現這些系統的最優控制[4]。太陽能光伏系統所處外界環境復雜,最優穩態模型不確定,傳統最優控制難以應用,因此可采用極值搜索控制方法實現動態環境下的最大功率點跟蹤(MPPT)控制[5]。
傳統MPPT 控制技術,例如增量電導法(INC)、擾動和觀測方法(P&O)基于梯度下降原理,無法區分局部最優和全局最優值[6]。基于智能優化的MPPT控制技術,例如蟻群算法(ACO)、灰狼算法(GWO)等由于其隨機性的特點,動態性能參差不齊且系統振蕩過多,工業應用困難[7]。課題組研究了一種基于改進布谷鳥算法(CS)的極值搜索控制方法,并進行了仿真實驗以驗證方法性能。首先,介紹控制系統動力學模型;其次,介紹基于改進布谷鳥算法的極值搜索控制方法;再次,進行實驗測試;最后,對全文進行總結。
1 太陽能光伏系統動力學模型
一般的太陽能光伏系統由三個部分組成,即太陽能電池、DC-DC 轉換電路和MPPT 控制器。太陽能電池可以通過電流源、二極管和電阻進行建模[8],數學模型如式(1)所示:
式中,Iph(t)為太陽能電池發電產生的動態電流,Is為二極管飽和電流,V(t)為太陽能電池輸出電壓,Rs為串聯電阻,A、Vt為電路理想系數,可視為常數。DC-DC 斬波電路數學模型已有研究人員研究,如式(2)所示[9]:
綜上,可得太陽能光伏系統動力學模型,如式(3)所示:
式中,f、J均為系統狀態變量、輸出變量的平滑映射函數,其中J為不確定函數。而且由于能量守恒定律限制,該系統為自穩定系統且對于任意的J皆存在u*,使得y=y*,y*≥y(t)。
2 基于改進布谷鳥算法的極值搜索控制方法(ICS)
布谷鳥搜索算法通過模擬布谷鳥的寄生育雛習性有效求解優化問題[10]。布谷鳥采用一種迭代方式由一個巢隨機飛向另一個巢,尋找安全孵化幼崽概率最高的巢穴。如果宿主發現了布谷鳥蛋,則會將其扔掉或者棄巢。布谷鳥算法利用Levy 飛行實現布谷鳥由一個巢飛向另一個巢的迭代,如式(4)所示:
式中,i是迭代次數,k=1,2,…,ss是當前搜尋群體中的個體排序,ss是搜索群體大小,α是搜索步長,u和v是基于均勻分布的隨機矩陣,如式(5)所示:
其中,u和v的方差如式(6)所示:
每一次迭代后布谷鳥蛋均有被宿主發現的危險,被發現概率為p。若被發現,則布谷鳥會飛向隨機巢并重新迭代。為加快算法收斂速度,改進布谷鳥蛋被發現后的迭代算法,布谷鳥不飛向隨機位置而繼續向當前全局最優dbest迭代,如式(7)所示:
這樣就使得算法向當前最優值更快速移動,提升了算法的收斂速度。假設系統擾動響應速度慢于系統控制器輸入調整速度,系統輸入調整速度慢于系統輸出響應速度,則在調節時間內,可認為系統外界擾動為常值,在該時間尺度下系統模型為定長確定模型。以該時間尺度為采樣和控制調節時間,在該時間尺度利用改進布谷鳥算法實現優化控制,則可得到系統離散控制率u(k)。
由于物理系統為連續系統,而改進布谷鳥算法為離散算法,因此需將離散的布谷鳥算法轉變為連續系統的控制器。基于零階保持器的原理,在采樣的兩個時刻之間,控制輸入保持不變,則可得離散-連續的極值搜索控制方法,如式(8)所示:
3 數值仿真
本文利用MATLAB 建立了太陽能光伏系統動力學模型,該模型模擬環境溫度為20 ℃,PWM 頻率設置為100 kHz,采樣頻率為0.001 s,模擬失配條件下的光伏發電系統輸入PWM 信號占空比到輸出功率的平滑映射函數。該函數呈現多峰特性,具有4 個極點且最大輸出功率為570 W。本文利用Runge-Kutta 方法求該仿真模型的數值解。
實驗測試了在相同情況下傳統CS 算法和本文提出的ICS 算法的性能,算法仿真結果如圖1 所示。傳統CS 算法和本文提出的ICS 算法均能找到全局最優值,但本文提出的ICS 算法找到的全局最優值為559.74 W,傳統CS 算法找到的全局最優值為522.04 W,且在穩定后傳統CS 算法存在小幅度振蕩,而本文提出的ICS 算法不存在穩態振蕩,因此本文提出的ICS 算法穩態性能遠優于傳統CS 算法。傳統CS 算法在0.078 3 s 后收斂,而本文提出的ICS 算法在0.025 5 s 處實現收斂,本文提出的ICS 算法調節時間三倍優于傳統CS 算法。傳統CS 算法存在大幅振蕩10 余次,小幅振蕩20 余次,而本文提出的ICS 算法僅存在大幅振蕩兩次,小幅振蕩一次,算法動態性能遠優于傳統CS算法。
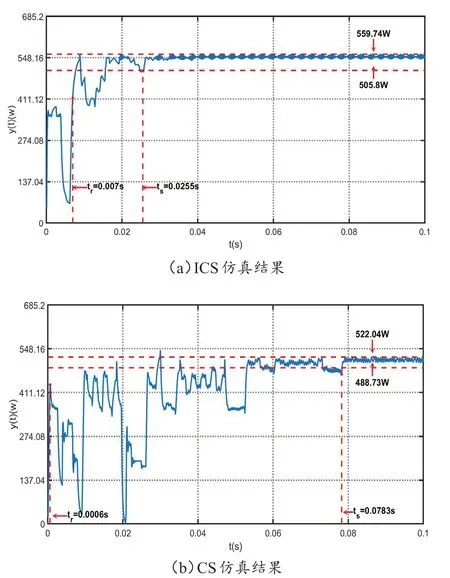
圖1 算法仿真結果
綜上所述,本文所提出的ICS 算法在仿真研究中動態性能和穩態性能遠優于傳統CS 算法,其在調節時間、振蕩水平和極值搜索能力等方面均性能優越。
4 結論
首先,基于太陽能光伏系統的物理機理和控制電路,課題組提出了一種動力學模型以解釋和概括太陽能光伏系統;基于極值搜索控制機理,課題組提出了基于時間尺度的假設,并驗證了太陽能光伏系統極值搜索的可能性。
其次,課題組提出了一種基于改進布谷鳥算法的極值搜索控制方法,在采樣時間內完成系統的最優控制,并基于離散-連續控制方法實現連續動態太陽能光伏系統的最優控制。該方法結構簡單,動態性能和穩態性能卓越,且實現了離散-連續控制轉換,可用于數字控制電路。
最后,課題組通過數值仿真將提出的算法在失配條件下與傳統CS 算法進行比較,以驗證算法追蹤全局最大功率點(GMPP)的能力。結果顯示,課題組提出的ICS 算法可以非常精準地找到和追蹤GMPP,其動態性能和穩態性能均遠優于傳統CS 算法,其中算法穩態振蕩全部消除,算法找到的極值輸出功率也大于傳統CS 算法,算法調節速度提升了約兩倍,算法振蕩水平大幅降低。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34