異步蜂窩機會信號的差分到達時間定位方法
2023-06-26 07:21:16李方馳
導航定位學報 2023年3期
金 天,李方馳
異步蜂窩機會信號的差分到達時間定位方法
金 天,李方馳
(北京航空航天大學 電子信息工程學院,北京 100083)
針對蜂窩機會信號定位中現有的解決基站信號異步性的方案通常依賴多終端合作或全球衛星導航系統(GNSS)輔助的時鐘估計,使蜂窩機會信號定位的應用場景有限且實現成本高昂的問題,提出一種基于差分到達時間(DTOA)的蜂窩機會信號定位方法:利用半定松弛(SDR)求解非凸的DTOA解算問題,實現初始定位;然后利用擴展卡爾曼濾波(EKF)實現實時定位。實驗結果表明,所提方法的初始定位均方根誤差為4.2 m,可以擺脫蜂窩機會信號定位系統對GNSS初始化過程的依賴。
機會信號;蜂窩信號;凸優化;差分到達時間(DTOA);全局收斂
0 引言
全球衛星導航系統(global navigation satellite system,GNSS)提供的定位、導航和授時服務已經成為各種軍事和民生應用的重要組成部分[1]。然而,GNSS信號功率低,易受干擾和遮擋,存在較大的脆弱性。目前,在高度自動化駕駛、智能交通系統、物聯網等新興領域,GNSS已不能滿足日益復雜的定位需求[2]。近年來,研究人員將空間中的機會信號(signal of opportunity,SOP)用于定位,以實現對GNSS的替代和補充。典型的機會信號包括蜂窩通信、數字電視、調頻(frequency modulation,FM)廣播和低地球軌道(low Earth orbit,LEO)衛星信號等[3-5]。其中,蜂窩信號因具有接收功率強、通信帶寬大和終端成本低等優點,得到了廣泛的關注[6]。
蜂窩信號定位通常需要用戶與基站進行雙向通信,并且需要運營商提供定位參考信號(positioning reference signal,PRS)等支持。文獻[7]中介紹了從第一代到第四代移動通信技術網絡定位服務的標準化、實施和發展。文獻[8]中介紹了第五代移動通信技術中針對不同部署場景和用例的定位技術。這些技術可以被歸類于基于網絡的定位方法。然而,基于網絡的定位可能損害用戶的隱私,且多數運營商傾向于為流量傳輸提供更多的資源而不是傳輸PRS[9],限制了基于網絡的蜂窩信號定位應用。
蜂窩機會信號定位僅利用下行鏈路信號估計用戶的位置,在充分利用多個運營商信號的同時規避上述缺點。近年來,蜂窩機會信號定位取得了許多突出的成果,研究人員通過獲取偽距或載波相位,基于碼分多址(code-division multiple access,CDMA)信號、長期演進(long-term evolution,LTE)信號和新無線電(new radio,NR)信號開發了多種機會信號定位接收機[9-12]。現有的研究表明,基于偽距的蜂窩機會信號定位精度可達到米級,基于載波相位的蜂窩機會信號定位精度可達到厘米級。
然而,移動通信技術小區同步標準中,來自不同基站的信號是異步的,導致用戶和基站之間的未知時鐘偏差成為蜂窩機會信號定位的主要挑戰之一。目前有如下幾種典型的解決方案,但每一種方案都有一些不可忽視的缺點:
1)在文獻[13]中提出了一種基于到達時間和到達方向(direction-of-arrival,DOA)的聯合定位方法,通過引入DOA解決觀測量不足的問題。然而,基于DOA的定位精度受多徑傳播和用戶與基站之間距離的影響較大,且DOA估計所需的多天線信號處理大大增加了成本。
2)在文獻[14]中的差分定位框架和文獻[15]中討論的差分到達時間差(differential time-difference-of-arrival,DTDOA)定位方法利用多終端協作估計未知的時鐘信息。然而,由于LTE和第5代移動技術(fifth generation of mobile technologies,5G)基站覆蓋范圍有限,多終端協同定位的實現難度較大且成本較高。
3)文獻[16]中設計了一種擴展卡爾曼濾波(extended Kalman filter,EKF)模型,可以同時估計用戶的位置、速度,以及用戶和基站間的時鐘偏差和時鐘漂移差。但受制于EKF局部收斂的特性,需要良好的初始化,通常依賴GNSS完成。因此,它無法獨立工作,應用場景有限。
幸運的是,蜂窩信號基站具有相對較高的時鐘穩定性[17]。根據這一特點,本文提出了一種基于差分到達時間(differential time-of-arrival,DTOA)的異步蜂窩信號定位方法。DTOA定位的觀測量是用戶在不同時刻、不同位置上估計得到的同一基站信號TOA之間的差值。基于這些觀測量可以列出一個非線性超定方程組,進而求解出時鐘信息和一系列用戶位置。
然而,DTOA解算問題是非凸的,且非線性程度非常高,使用加權最小二乘迭代方法求解易出現局部收斂和發散的現象。本文中,我們參考凸優化在其他定位問題中的應用[18-20],以極大似然準則構建目標函數,提出一種半定松弛(semidefinite relaxation,SDR)方法求解DTOA定位模型。隨后,將半定規劃解作為加權最小二乘迭代方法的初始猜測,可以確保全局收斂并達到克拉美羅下界(Cramer-Rao lower bound,CRLB)精度。
由于DTOA解算需要多個觀測時刻完成,且所需的時鐘穩定性條件僅在相對較短的時間內滿足;因此,在本文提出的定位方法中,僅利用DTOA解算實現初始定位和時鐘信息估計,實時定位則由DTOA定位初始化的EKF實現。最后通過城市環境中的實際信號定位實驗驗證該方法的性能。
1 DTOA定位模型

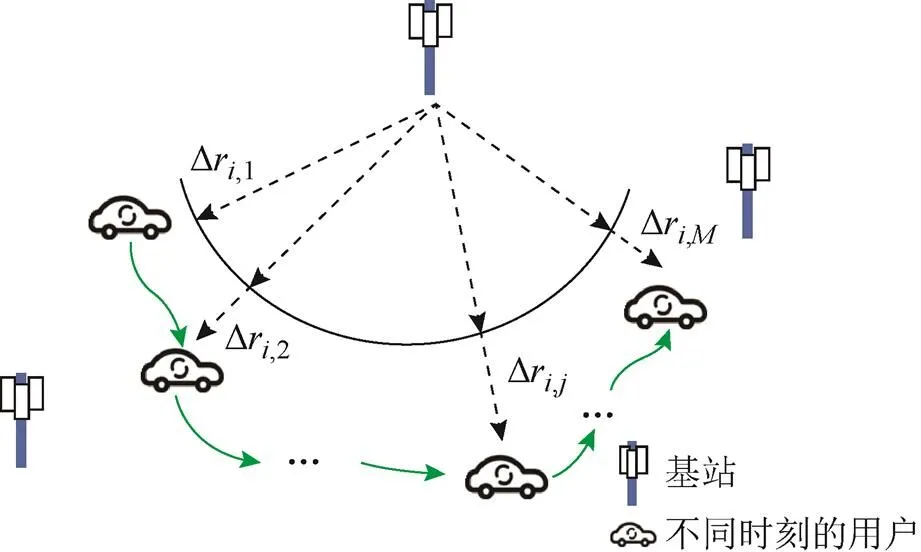
圖1 DTOA定位模型

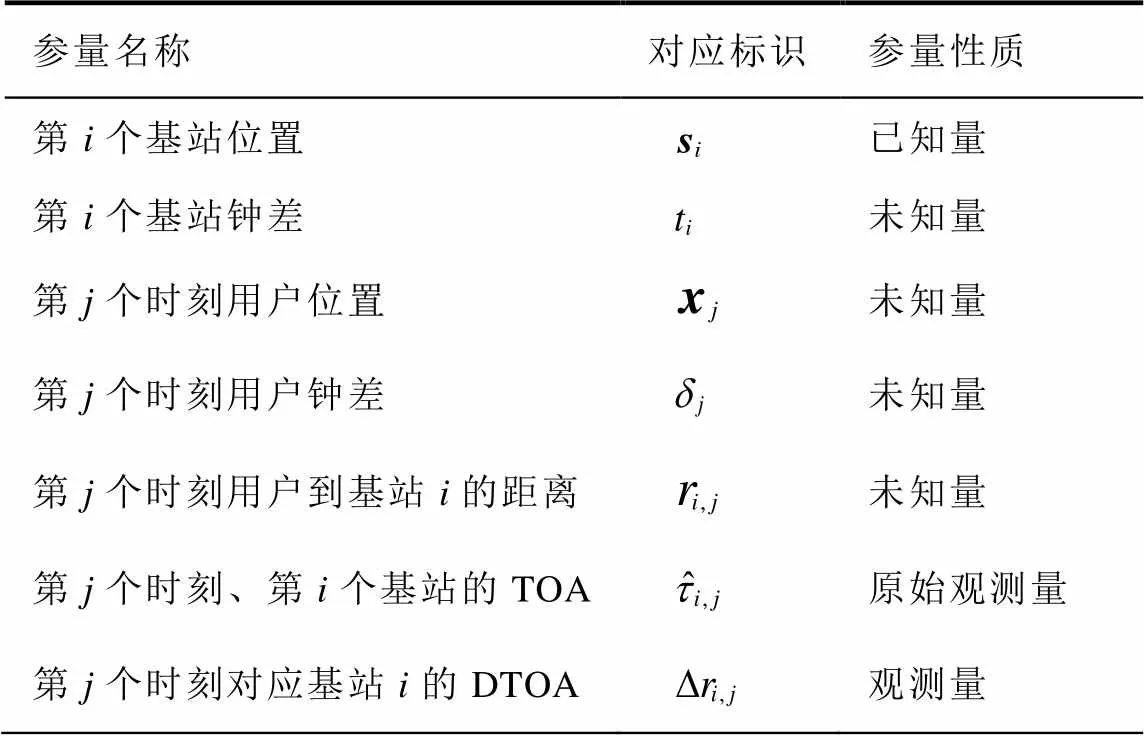
表1 DTOA定位模型參量



DTOA定位和目前已得到廣泛研究并應用的TDOA定位主要有以下3點不同:首先,二者的前提假設不一樣,前者需要信號源間同步,后者需要信號源時鐘相對穩定;其次,二者的差分量不一樣,前者需要對同一時刻的TOA觀測量作差,而后者針對不同時刻;最后,二者建立的方程組在數學特性上有較大的區別,后者的非線性特性更強,傳統的加權最小二乘迭代在解算DTOA問題時極易局部收斂和發散,需要進一步研究解算方法。
2 基于DTOA的蜂窩機會信號定位方法
本文提出的DTOA定位方法主要包括初始定位和實時定位2個階段。在初始化階段,用戶獲取的觀測量將用于DTOA定位,之后可以通過用戶位置、基站位置和TOA來估計用戶和各個基站間的時鐘偏差,進而完成對EKF的初始化;在實時定位階段,用戶獲取的觀測量將用于EKF的狀態更新,進而實時估計用戶位置和時鐘信息。
由于用于蜂窩信號定位的EKF已在諸多文獻中得到充分的討論,本文重點討論DTOA定位算法。
2.1 基于SDR的DTOA問題解算
首先,需要根據最大似然準則建立問題的目標函數,令:



于是可得問題1為:



然而,問題2的計算復雜度太高,因此在其基礎上對用戶位置對應的半定矩陣分塊,可進一步將原問題松弛為:





2.2 基于加權最小二乘迭代的最優解求解
(23)
令:
(25)
可以基于如下等式利用加權最小二乘迭代求解x:
2.3 基于EKF的實時定位
由于DTOA解算需要多個觀測時刻完成,且依賴時鐘短期內的穩定性,因此不適合用于長期的實時定位。因此,需要利用DTOA解算得到的最新時刻及上一時刻的用戶位置計算出當前的用戶位置、速度和時鐘狀態量,進而實現對EKF的初始化并開始實時定位。在現有的文獻中,可以找到用于蜂窩信號定位的EKF的詳細介紹[16]。
3 實驗與結果分析
為了評估提出系統的性能,在城市環境中利用LTE信號進行現場測試,驗證SDR方法應用的價值,并利用GNSS初始化的傳統定位方法對比分析基于DTOA的定位方法的性能。
3.1 硬件配置
如圖2所示,本文使用了一個定制的實驗平臺,集成了通用軟件無線電外設(universal software radio peripherals,USRP)、計算機及配套天線。平臺使用了3個消費者級蜂窩全向天線,采集不同載波頻率的LTE信號,并用USRP對LTE信號進行采樣,通過計算機實現LTE定位功能。除此之外,平臺中還有一套GNSS天線和接收機用于實現傳統的定位,進而和本文所提方法形成對比。
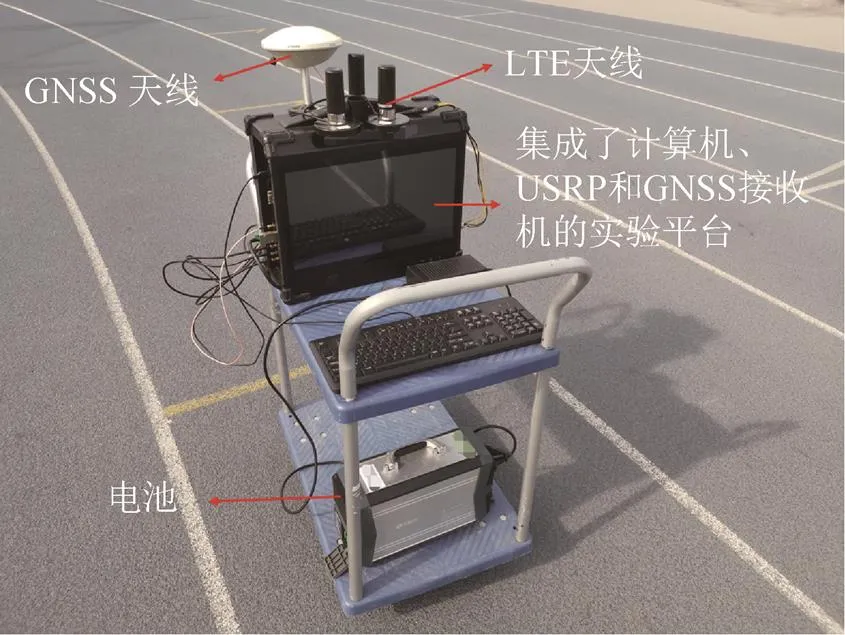
圖2 硬件配置
3.2 測試場景
本文利用4個LTE基站傳輸的信號進行現場測試,使用的基站信息如表2所示。其中,基站的位置被轉換到以基站1的地面位置為原點的東、北、天向坐標上。現場實驗中LTE基站的位置和實際用戶軌跡如圖3所示。用戶軌跡長度為809 m,整個運動過程中的高度變化可以忽略不計。所有測量值都根據基站高度投影到了二維平面上,以獲得二維定位結果。表2中,ID(identity)為身份標識號。
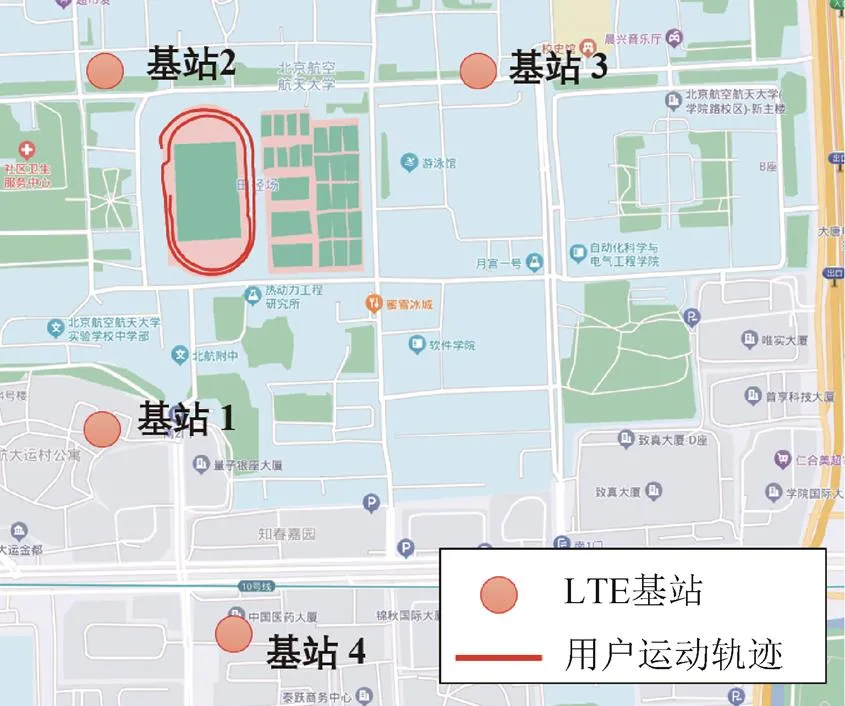
圖3 測試場景
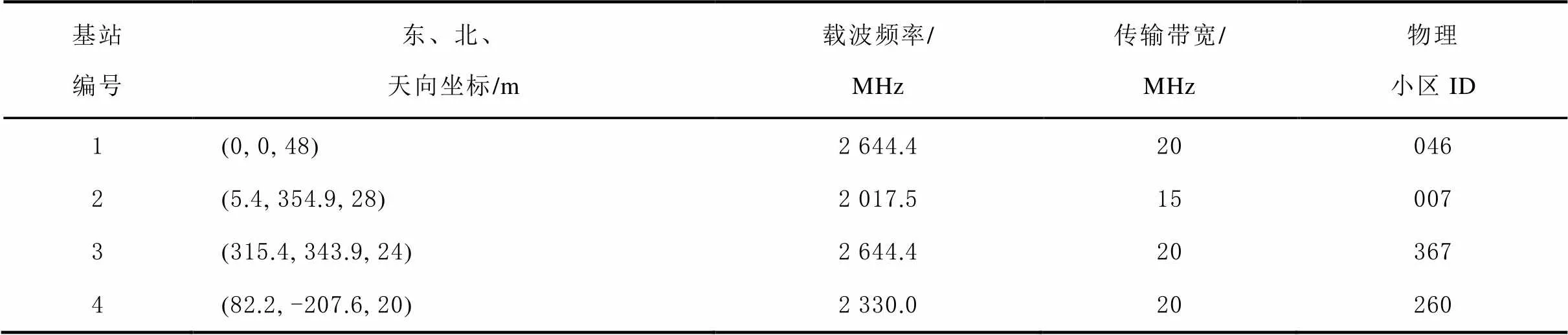
表2 基站信息
3.3 結果分析
本文在利用多徑估計方法[22]的基礎上提取了上述4個基站的TOA觀測量,結果如圖4所示。可以看出,基站2和基站4在部分場景中出現了非視距傳輸現象,但整體上滿足DTOA解算所需的條件。
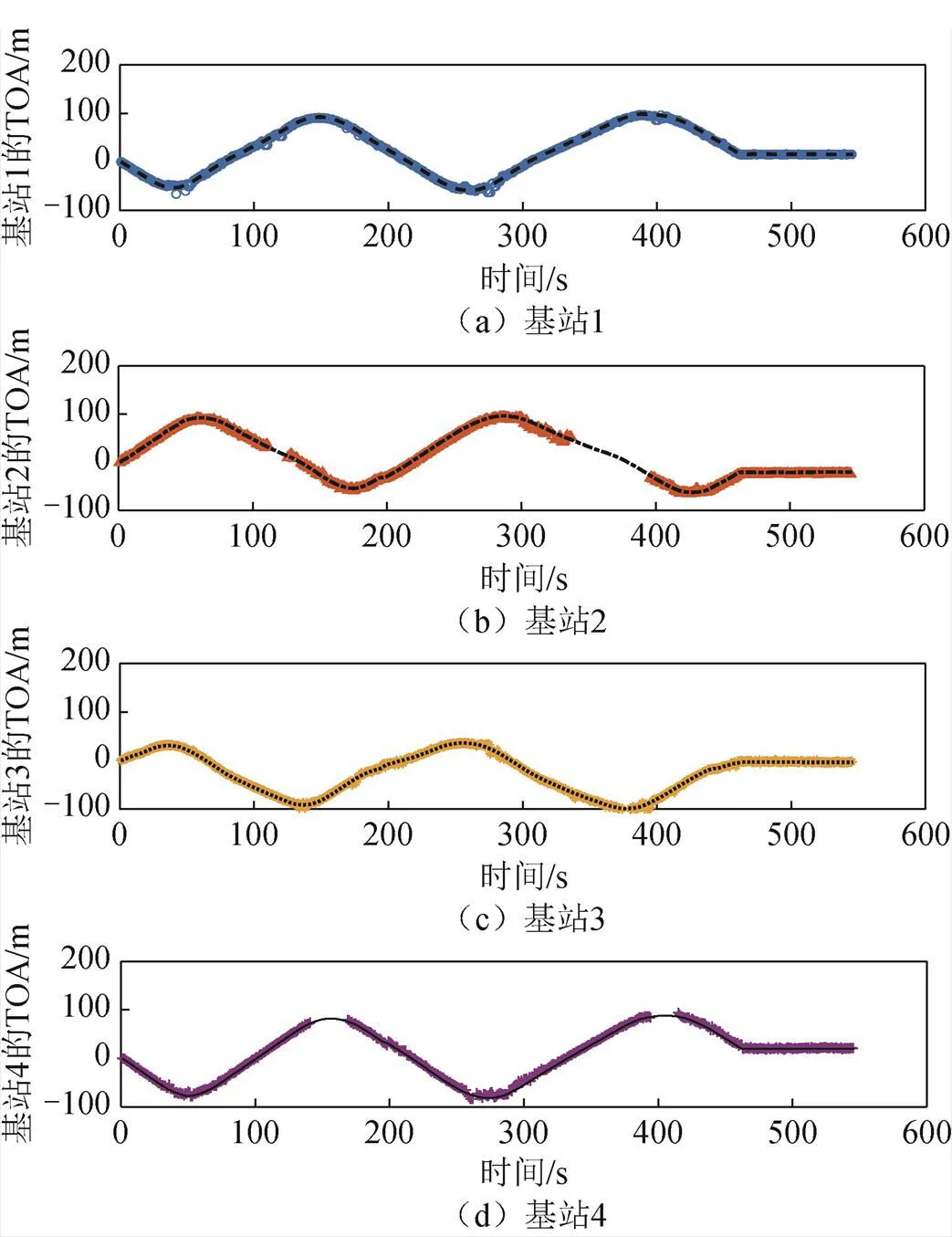
圖4 從4個基站獲取的TOA觀測量
本次實驗中,用戶軌跡被劃分為2段。第一段長為104 m,在時間上均勻選出51個點用于DTOA解算;第二段長為705 m,用于驗證DTOA解算初始化的EKF性能。
為了驗證SDR方法的效果,本文首先采用隨機選取迭代初始值進行加權最小二乘迭代的方法求解DTOA問題,完整的定位結果如圖5所示。可以看出,迭代出現了局部收斂的現象,導致EKF的初始化出現了嚴重的偏差,直到用戶繼續運動了約100 m后才能給出可靠的定位結果。而應用了SDR方法的DTOA解算過程實現了全局收斂,定位結果如圖6(a)所示。其中DTOA解算階段的均方根誤差(root mean-squared error,RMSE)為4.2 m,EKF實時定位階段的RMSE為4.8 m。此外,本文還利用GNSS初始化的EKF和DTOA初始化的EKF對比,以進一步驗證所提方法的性能。對比實驗結果如圖6(b)所示,可以看出在沒有先驗初始狀態,沒有GNSS或其他傳感器輔助,沒有與其他設備通信的前提下,本文提出的基于DTOA的異步蜂窩信號定位方法精度與GNSS初始化的方法精度相近。
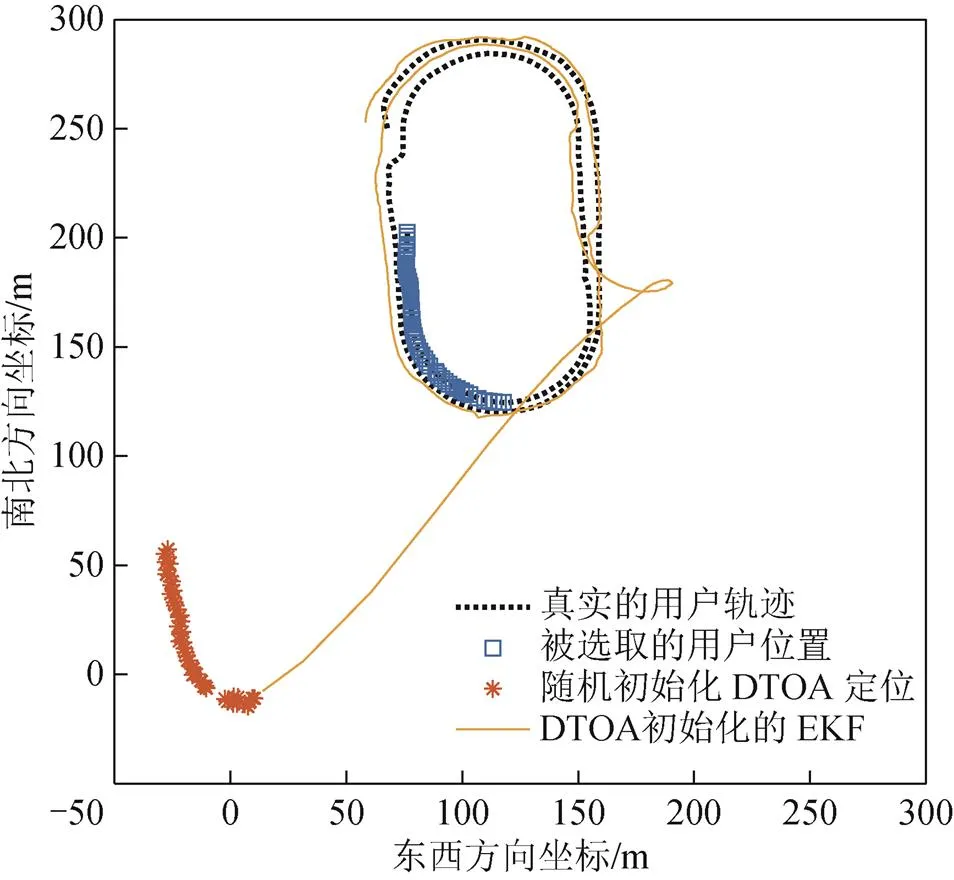
圖5 隨機初始化的DTOA定位出現了局部收斂現象
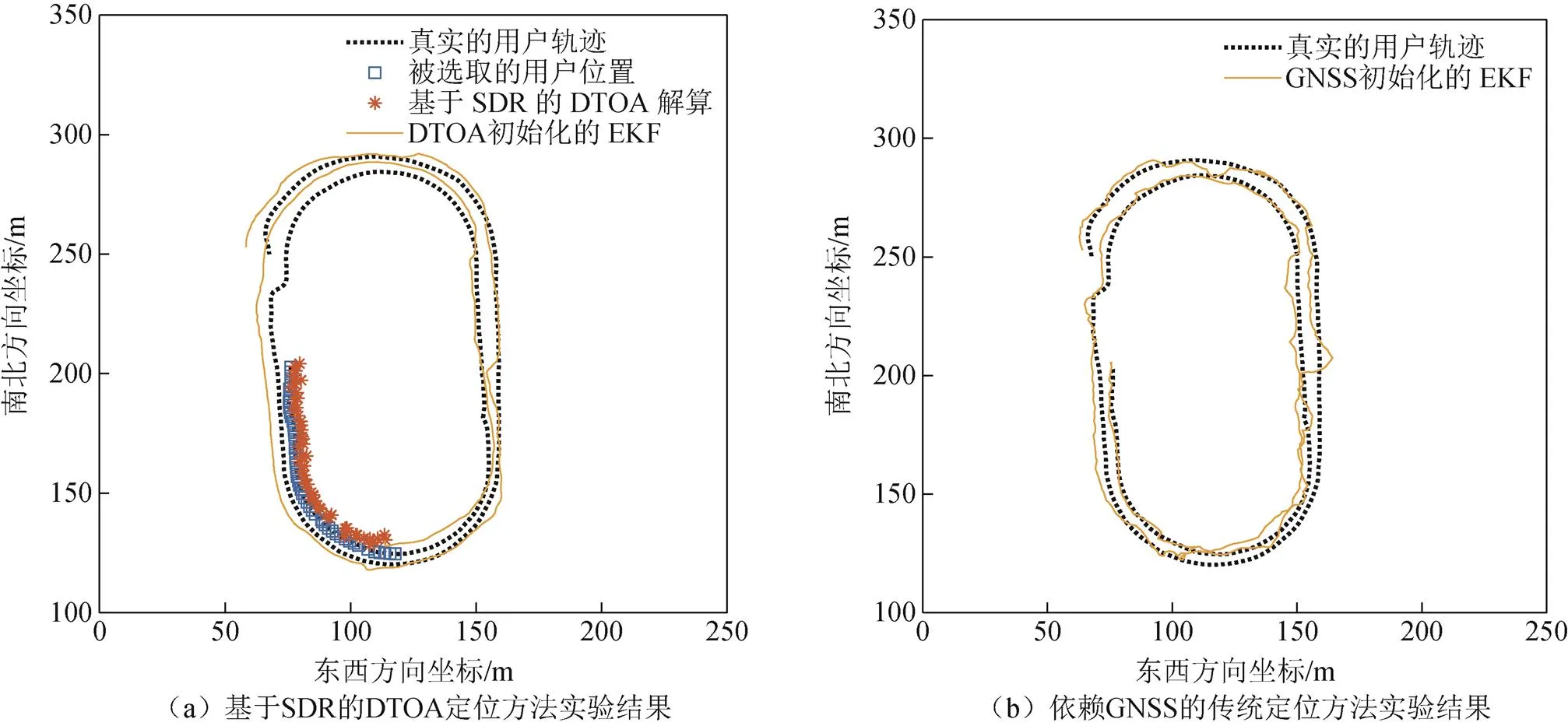
圖6 基于SDR的DTOA定位方法和依賴GNSS的定位方法對比
4 結束語
本文提出了一種DTOA定位模型,并在此基礎上設計了一種異步蜂窩信號定位方法。該方法無需基站和用戶狀態的時鐘先驗信息,利用不同基站的TOA觀測量,可以在不借助GNSS、其他傳感器或其他通信設備的情況下實現異步蜂窩機會信號定位。此外,針對加權最小二乘迭代方法求解DTOA模型出現局部收斂和發散現象的問題,本文中提出了一種半定松弛方法,實現了全局收斂的DTOA解算。
在城市環境中開展的實際信號定位實驗結果表明,基于SDR方法解算DTOA問題可以實現全局收斂,基于DTOA的異步蜂窩基于信號定位方法精度為4.2 m,可以達到和利用GNSS初始化的蜂窩機會信號定位方法相近的精度。
[1] MOE Z W, ANDREA C, SANTIAGO M, et al. Network localization and navigation via cooperation[J]. IEEE Communications Magazine, 2011, 49(5): 56-62.
[2] FARAHSARI P S, FARAHZADI A, REZAZADEH J, et al. A survey on indoor positioning systems for IoT-based applications[J]. IEEE Internet of Things Journal, 2022, 9(10): 7680-7699.
[3] HONG T, SUN J, JIN T, et al. Hybrid positioning with dtmb and lte signals[C]//The Institute of Electrical and Electronics Engineers (IEEE). Proceedings of the 2021 International Wireless Communications and Mobile Computing (IWCMC). Harbin City, China: IEEE Press, 2020: 303-307[2022-08-05]
[4] CONG L, TIAN J, QIN H. A practical floor localization algorithm based on multifeature motion mode recognition utilizing fm radio signals and inertial sensors[J]. IEEE Sensors Journal, 2021, 20(15): 8806-8819.
[5] 秦紅磊, 張宇. 星鏈機會信號定位方法研究[J/OL].導航定位學報.(2022-05-16)[2022-08-05]. https://t.cnki.net/ kcms/detail?v=z5FXOKLI3LxicMRmV36e5TWTcOHT_tL1RA70wdKfMzYL_tmIjOBrZiU8Mvr8MO1ins5XfIyAAPWo58_kfTLSrbvEzyDxojm4YUBFIFwJ03Ubb6Ofodr37A==&uniplatform=NZKPT.
[6] KASSAS M Z, KHALIFE J, SHAMAEI K, et al. I hear; therefore, I know where I am: Compensating for GNSS limitations with cellular signals[J]. IEEE Signal Processing Magazine, 2017, 34(5):111-124.
[7] DEL A J, RAULEFS R, LóPEZ-SALCEDO A J, et al. Survey of cellular mobile radio localization methods: From 1G to 5G[J]. IEEE Communications Surveys & Tutorials, 2018, 20(2): 1124-1148.
[8] QUALCOMM. 5G: Bringing precise positioning to the connected intelligent edge[EB/OL].[2022-08-25]. https://www.qualcomm.com/media/documents/files/5g-positioning-for-the-connected-intelligent-edge.pdf.
[9] KHALIFE J, SEVINC C, KASSAS Z M. Performance evaluation of TOA positioning in asynchronous cellular networks using stochastic geometry models[J]. IEEE Wireless Communications Letters, 2020, 9(9): 1422-1426.
[10] KHALIFE J, KASSAS M Z. Navigation with cellular CDMA signals Part II: Performance analysis and experimental results[J]. IEEE Transactions on Signal Processing, 2018, 66(8): 2204-2218.
[11] SHAMAEI K, KHALIFE J, KASSAS M Z. Exploiting LTE signals for navigation: theory to implementation[J]. IEEE Transactions on Wireless Communications, 2018, 17(4): 2173-2189.
[12] SHAMAEI K, KASSAS Z. Receiver design and time of arrival estimation for opportunistic localization with 5G signals[J]. IEEE Transactions on Wireless Communications, 2021, 20(7): 4716-4731.
[13] SHAMAEI K, KASSAS Z. A joint TOA and DOA acquisition and tracking approach for positioning with LTE signals[J]. IEEE Transactions on Signal Processing, 2021: 2689-2705.
[14] ABDALLAH A A, KASSAS M Z. Multipath mitigation via synthetic aperture beamforming for indoor and deep urban navigation[J]. IEEE Transactions on Vehicular Technology, 2021, 70(9): 8838-8853.
[15] LENG M, TAY P W, SEE C, et al. Modified CRLB for cooperative geolocation of two devices using signals of opportunity[J]. IEEE Transactions on Wireless Communications, 2014, 13(7): 3636-3649.
[16] KHALIFE J, KASSAS M Z. Opportunistic UAV navigation with carrier phase measurements from asynchronous cellular signals[J]. IEEE Transactions on Aerospace and Electronic Systems, 2020, 56(4): 3285-3301.
[17] KHALIFE J, KASSAS Z M. Evaluation of relative clock stability in cellular networks[EB/OL]. [2022-08-25]. https://eds.p.ebscohost.com/eds/detail/detail?vid=1&sid=96e343c7-f98d-48ac-8e8d-a6056c57ff98%40redis&bdata= Jmxhbmc9emgtY24mc2l0ZT1lZHMtbGl2ZQ%3d%3d#AN=edssch.oai%3Aescholarship.org%2Fark%3A%2F13030%2Fqt0kr5x3kz&db=edssch.
[18] LUO Z Q, MA W K, SO A M C, et al. Semidefinite relaxation of quadratic optimization problems[J]. IEEE Signal Processing Magazine, 2010, 27(3): 20-34.
[19] YANG K, WANG G, LUO Z Q. Efficient convex relaxation methods for robust target localization by a sensor network using time differences of arrivals[J]. IEEE Transactions on Signal Processing, 2009, 57(7): 2775-2784.
[20] WANG G, LI Y, ANSARI N. A semidefinite relaxation method for source localization using TDOA and FDOA measurements[J]. IEEE Transactions on Vehicular Technology, 2013, 62(2): 853-862.
[21] TORRIERI J D. Statistical theory of passive location systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 1984, 20(2): 183-198.
[22] WANG P, MORTON J Y. Multipath estimating delay lock loop for lte signal toa estimation in indoor and urban environments[J]. IEEE Transactions on Wireless Communications, 2020, 19(8): 5518-5530.
Differential time of arrival based opportunistic positioning for asynchronous cellular signals
JIN Tian, LI Fangchi
(School of Electronic and Information Engineering, Beihang University, Beijing 100083, China)
Aiming at the problem that existing solutions to base station signal asynchronism in opportunistic cellular signal positioning typically rely on global navigation satellite system (GNSS)-assisted initialization or multiterminal collaboration, resulting in limited application scenarios and high implementation costs, the paper proposed a differential time-of-arrival (DTOA)-based opportunistic cellular signal positioning method: the semidefinite relaxation (SDR) was used to solve the non-convex DTOA to achieve initial localization; and extended Kalman filter (EKF) was utilized to achieve real-time localization. Experimental result showed that the root mean-squared errors of initial positioning of the proposed method could be 4.2 m, which is close to the accuracy of GNSS-assisted initialization.
signal of opportunity; cellular signal; convex optimization; differential time-of-arrival (DTOA); global convergence
金天,李方馳. 異步蜂窩機會信號的差分到達時間定位方法[J]. 導航定位學報, 2023, 11(3): 22-28.(JIN Tian, LI Fangchi. Differential time of arrival based opportunistic positioning for asynchronous cellular signals[J]. Journal of Navigation and Positioning, 2023, 11(3): 22-28.)
10.16547/j.cnki.10-1096.20230304.
P228
A
2095-4999(2023)03-0022-07
2022-08-26
國家自然科學基金項目(62071020)。
金天(1981—),男,上海普陀人,博士,副教授,研究方向為無線電導航、軟件無線電技術等。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56